Изобретение относится к области обработки и анализа инструментально-зарегистрированной полетной информации и может быть использовано для автоматизированного оценивания показателей качества управляющих действий летчика при выполнении посадки.
Известен способ оценивания качества пилотирования на этапе посадки путем киносъемки направления взгляда летчика, с одновременным оцениванием характера движения ручки управления и времени активной работы стабилизатора (см. Авиационная медицина / Под ред. Н.М. Рудного, П.В. Васильева, С.А. Гозулова. - М.: Медицина, 1986. - С.335-348). Ввиду своей сложности данный способ неприменим в условиях эксплуатирующей организации и требует установки на самолет дополнительного оборудования.
Известен способ оценивания качества пилотирования самолета летчиком по предельным отклонениям текущих значений параметров; от их заданных значений при выполнении контролируемых элементов фигур пилотажа или маневров (см. а.с. СССР 1702807. Устройство для оценки качества пилотирования самолета летчиком / В.В. Кашковский, Ю.А. Кибардин, В.В. Устинов (СССР). - №4729345; заявл. 11.08.89; опубл. 1.09.91). Недостатком этого способа является невозможность его применения для этапа посадки, так как на малых высотах рельеф местности вносит значительные погрешности на отображение заданной траектории снижения самолета (глиссады). Следовательно, не представляется возможным и определение правильного положения самолета относительно глиссады.
Наиболее близким по технической сущности является способ оценивания качества пилотирования самолета летчиком на этапе посадки, включающий регистрацию параметров полета самолета и действий летчика, передачу их в наземное устройство автоматизированной обработки полетной информации, сравнение зарегистрированных значений параметров полета в контрольных сечениях этапа посадки: выход на посадочный курс, снижение на посадочном курсе, проход дальнего приводного радиомаяка, проход ближнего приводного радиомаяка, выравнивание и приземление; со значениями, установленными нормативными документами, и на этой основе принятие решения о качестве пилотирования самолета летчиком (см. Быстров С.А. Методы и средства объективного контроля: учебное пособие / С.А. Быстров, И.С. Хуснетдинов. - М.: ВВИА им. проф. Н.Е. Жуковского, 2008. - С.68-76). Недостатком этого способа является то, что не оцениваются действия летчика между контрольными сечениями. Это снижает надежность, объективность и достоверность оценки качества пилотирования самолета летчиком на этапе посадки.
Техническим результатом изобретения является повышение надежности, объективности и достоверности оценки качества пилотирования самолета летчиком на этапе посадки за счет оценивания действий летчика на протяжении всего этапа снижения по глиссаде, без потерь информации о действиях летчика между контрольными сечениями.
Указанный результат достигается тем, что способ оценивания качества пилотирования самолета летчиком, включающий регистрацию параметров полета самолета и действий летчика штатным бортовым устройством регистрации, передачу их в наземное устройство автоматизированной обработки полетной информации, сравнение зарегистрированных значений параметров полета самолета в контрольных сечениях: выход на посадочный курс, снижение на посадочном курсе, проход дальнего приводного радиомаяка, проход ближнего приводного радиомаяка, выравнивание и приземление; со значениями, установленными нормативными документами, и на этой основе принятие решения о качестве пилотирования самолета летчиком, отличается тем, что в наземном устройстве автоматизированной обработки полетной информации формируют массив данных об угле отклонения ручки управления самолетом по тангажу на этапе посадки, путем фильтрации выделяют высокочастотную составляющую этого сигнала, формируют ее плотность распределения, по которой определяют длину интервала плотности распределения ΔL и, если ΔL>4,69 град, то принимают решение, что посадка выполнена на уровне летчика-снайпера и летчика 1 класса, при 2,85<ΔLp≤4,69 град посадка выполнена на уровне летчика 2 класса, при 1,49<ΔLp≤2,85 град посадка выполнена на уровне летчика 3 класса, при ΔLp≤1,49 град посадка выполнена на уровне летчика без классной квалификации.
Сущность изобретения заключается в том, что в наземном устройстве автоматизированной обработки полетной информации формируют массив данных об угле отклонения ручки управления самолетом по тангажу на этапе посадки. Указанный параметр содержит полную информацию о качестве пилотирования летчиком самолета с момента начала снижения по глиссаде до приземления. Путем фильтрации выделяют высокочастотную составляющую этого сигнала, формируют ее плотность распределения, по которой определяют длину интервала плотности распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу ΔLp. Экспериментально установлено (см. Тихий И.И. Оценка качества управления сложными техническими объектами / Тихий И.И., Кашковский В.В., Полуэктов С.П. // Вестн. Иркут. гос. тех. ун-та. - 2008. - Вып.2 (34). - С.37-41), что если длина интервала плотности распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу ΔLp>4,69 град, то принимают решение, что посадка выполнена на уровне летчика-снайпера и летчика 1 класса, при 2,85<ΔLp≤4,69 град посадка выполнена на уровне летчика 2 класса, при 1,49<ΔLp≤2,85 град посадка выполнена на уровне летчика 3 класса, при ΔLp≤1,49 град посадка выполнена на уровне летчика без классной квалификации. Указанная последовательность операций дает возможность повысить надежность, объективность и достоверность оценки качества пилотирования самолета летчиком на этапе посадки за счет оценивания действий летчика на протяжении всего этапа снижения по глиссаде, без потерь информации о действиях летчика между контрольными сечениями.
Способ оценивания качества пилотирования самолета летчиком на этапе посадки по данным штатного бортового устройства регистрации на основе информации о величине длины интервала плотности распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу может быть реализован, например, с помощью устройства, структурная схема которого представлена на фиг.1, где 1 - бортовое устройство регистрации, установленное непосредственно на самолете, 2 - устройство вычисления параметров пилотирования, 3 - пороговое устройство, 4 - устройство ввода нормативных параметров, 5 - устройство вычисления результатов пилотирования, 6 - фильтр, 7 - формирователь закона распределения. Устройства 2-7 установлены в наземном устройстве автоматизированной обработки полетной информации.
Назначение устройств, представленных на структурной схеме, соответствует их названию.
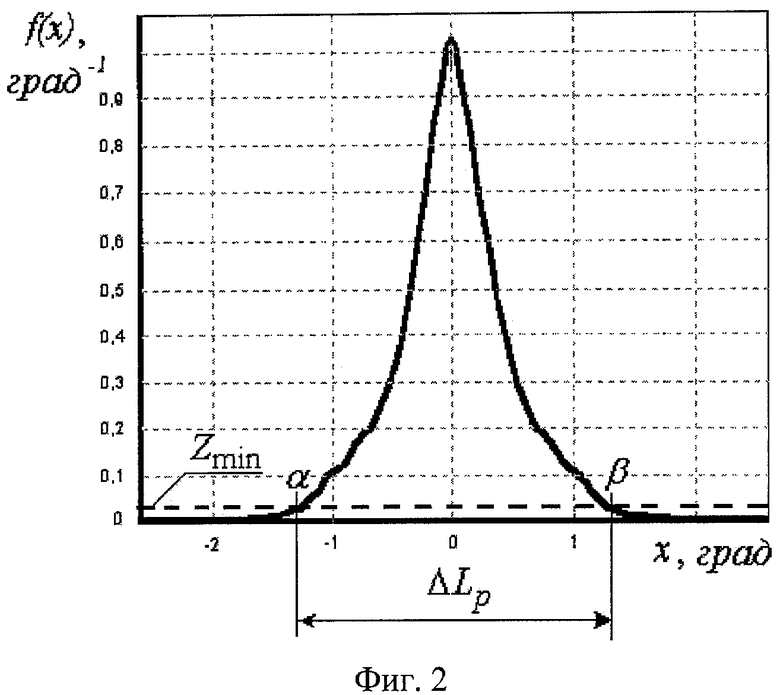
Устройство работает следующим образом. Инструментально зарегистрированная бортовым устройством регистрации 1 информация о параметрах полета самолета и действиях летчика после посадки самолета поступает в наземное устройство автоматизированной обработки полетной информации, где осуществляется вычисление параметров пилотирования в устройстве 2. При этом происходит выделение информативного параметра - угла отклонения ручки управления самолетом по тангажу - на участке снижения самолета по глиссаде в отдельный массив данных. Далее полетная информация разделяется на два информационных канала: первый - канал сравнения зарегистрированных значений параметров полета в контрольных сечениях со значениями, установленными нормативными документами, в устройстве 3, и второй - канал оценки качества пилотирования по параметру плотности распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу в устройствах 6 и 7. Из полученной реализации информативного параметра с помощью фильтра 6 (например, см. Гутников B.C. Фильтрация измерительных сигналов / B.C. Гутников. - Л.: Энергоатомиздат, 1990. - С.160-168) выделяется высокочастотная составляющая, а в формирователе 7 строится ее плотность распределения. По указанной плотности распределения определяется длина интервала ΔLp, представленная на фиг.2, на которой плотность распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу принимает значения более 0,02 град-1
ΔLр=(α; β) при f(x)≥0,02 град-1,
где х - высокочастотная составляющая угла отклонения ручки управления самолетом по тангажу, f(x) - плотность распределения параметра х, Zmin - минимальный уровень плотности распределения параметра х (экспериментально обосновано Zmin=0,02 град-1), α - левая граница, β - правая граница, ΔLp - длина интервала плотности распределения.
Полученная величина параметра ΔLp сравнивается с установленными диапазонами качества выполнения посадки и, если ΔLp>4,69 град, то принимают решение, что посадка выполнена на уровне летчика-снайпера и летчика 1 класса, при 2,85<ΔLp≤4,69 град посадка выполнена на уровне летчика 2 класса, при 1,49<ΔLp≤2,85 град посадка выполнена на уровне летчика 3 класса, при ΔLp≤1,49 град посадка выполнена на уровне летчика без классной квалификации.
В результате во втором информационном канале формируется оценка качества пилотирования этапа посадки по параметру плотности распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу. Далее итоговая информация о качестве пилотирования из первого и второго информационных каналов поступает в устройство вычисления результатов пилотирования, которое и выдает окончательную оценку действий летчика по управлению самолетом.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ оценивания качества пилотирования самолета летчиком на этапе посадки по длине интервала плотности распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций и оценивание качества пилотирования самолета летчиком на этапе посадки по длине интервала плотности распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу приводят к повышению надежности, объективности и достоверности оценки качества пилотирования самолета летчиком на посадке по данным штатного бортового устройства регистрации.
Технико-экономическая эффективность предложенного способа заключается в достижении более высокого уровня летной подготовки при сохранении объема затрат на обучение пилотов за счет повышения надежности, объективности и достоверности оценки качества пилотирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценивания качества пилотирования самолета летчиком на этапе выравнивания перед касанием | 2018 |
|
RU2693392C1 |
| Способ инженерно-психологической оценки подобия объектов управления на основе анализа характеристик взаимодействия "лётчик-самолёт" | 2020 |
|
RU2743958C1 |
| СПОСОБ КВАЛИМЕТРИИ ВЫДЕРЖИВАНИЯ ТАНГАЖА ПОЛЕТА ПРИ ПИЛОТИРОВАНИИ ВОЗДУШНОГО СУДНА В АВТОМАТИЧЕСКОМ РЕЖИМЕ | 2022 |
|
RU2801401C1 |
| СПОСОБ КВАЛИМЕТРИИ ВЫДЕРЖИВАНИЯ КУРСА ПОЛЕТА ПРИ ПИЛОТИРОВАНИИ ВОЗДУШНОГО СУДНА В АВТОМАТИЧЕСКОМ РЕЖИМЕ | 2022 |
|
RU2797068C1 |
| СПОСОБ КВАЛИМЕТРИИ ВЫДЕРЖИВАНИЯ ВЫСОТЫ ПОЛЕТА ПРИ ПИЛОТИРОВАНИИ ВОЗДУШНОГО СУДНА В АВТОМАТИЧЕСКОМ РЕЖИМЕ | 2022 |
|
RU2797058C1 |
| СПОСОБ КВАЛИМЕТРИИ ВЫДЕРЖИВАНИЯ СКОРОСТИ ПОЛЕТА ПРИ ПИЛОТИРОВАНИИ ВОЗДУШНОГО СУДНА В АВТОМАТИЧЕСКОМ РЕЖИМЕ | 2022 |
|
RU2797057C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ КАЧЕСТВА ПИЛОТИРОВАНИЯ САМОЛЕТА ЛЕТЧИКОМ | 1998 |
|
RU2136046C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
Изобретение относится к области обработки и анализа инструментально-зарегистрированной полетной информации. Техническим результатом является повышение надежности и достоверности оценки пилотирования самолета летчиком на этапе посадки. Сущность изобретения заключается в том, что в наземном устройстве автоматизированной обработки полетной информации формируют массив данных об угле отклонения ручки управления самолетом по тангажу на этапе посадки, путем фильтрации выделяют высокочастотную составляющую этого сигнала, формируют ее плотность распределения, по которой определяют длину интервала плотности распределения ΔLp и, если ΔLp>4,69 град, то принимают решение, что посадка выполнена на уровне летчика-снайпера и летчика 1 класса, при 2,85<ΔLp≤4,69 град посадка выполнена на уровне летчика 2 класса, при 1,49<ΔLp≤2,85 град посадка выполнена на уровне летчика 3 класса, при ΔLp≤1,49 град посадка выполнена на уровне летчика без классной квалификации. 2 ил.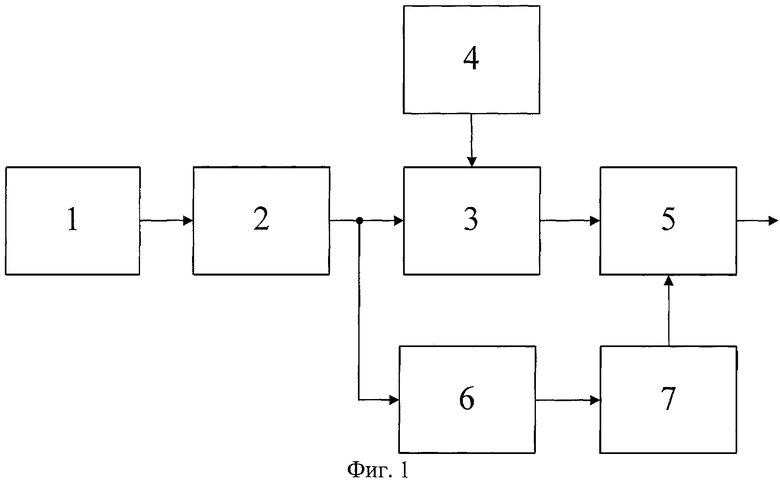
Способ оценивания качества пилотирования самолета летчиком на этапе посадки по данным штатного бортового устройства регистрации, включающий регистрацию параметров полета самолета и действий летчика штатным бортовым устройством регистрации, передачу их в наземное устройство автоматизированной обработки полетной информации, сравнение зарегистрированных значений параметров полета самолета в контрольных сечениях этапа посадки: выход на посадочный курс, снижение на посадочном курсе, проход дальнего приводного радиомаяка, проход ближнего приводного радиомаяка, выравнивание и приземление; со значениями, установленными нормативными документами, и на этой основе принятие решения о качестве пилотирования самолета летчиком, отличающийся тем, что в наземном устройстве автоматизированной обработки полетной информации формируют массив данных об угле отклонения ручки управления самолетом по тангажу на этапе посадки, путем фильтрации выделяют высокочастотную составляющую этого сигнала, формируют ее плотность распределения, по которой определяют длину интервала плотности распределения высокочастотной составляющей угла отклонения ручки управления самолетом по тангажу ΔLp, и, если ΔLp>4,69 град, то принимают решение, что посадка выполнена на уровне летчика-снайпера и летчика 1 класса, при 2,85<ΔLp≤4,69 град посадка выполнена на уровне летчика 2 класса, при 1,49<ΔLp≤2,85 град посадка выполнена на уровне летчика 3 класса, при ΔLp≤1,49 град посадка выполнена на уровне летчика без классной квалификации.
| СИСТЕМА СБОРА, РЕГИСТРАЦИИ, ПЕРЕДАЧИ, ОБРАБОТКИ И АНАЛИЗА, ПРЕИМУЩЕСТВЕННО ПОЛЕТНОЙ ИНФОРМАЦИИ О ПАРАМЕТРАХ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ, ПРЕИМУЩЕСТВЕННО ВОЗДУШНЫХ СУДОВ | 2001 |
|
RU2194307C1 |
| СИСТЕМА ПОДГОТОВКИ ДАННЫХ ДЛЯ АНАЛИЗА РЕЗУЛЬТАТОВ ПИЛОТИРОВАНИЯ | 2001 |
|
RU2179744C1 |
| Экономайзер | 0 |
|
SU94A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

