Заявляемое изобретение относится к области гидротехнических сооружений, а именно к конструкциям морских платформ для освоения мелководного континентального шельфа, и может быть использовано для транспортировки и монтажа тяжеловесных конструкций при строительстве.
Известна конструкция шагающей платформы [Walking platform construction], включающая подвижную платформу с множеством подвижных опор в вертикальном направлении относительно платформы (см. патент США №4288177 от 1981 г.).
Недостатком указанной известной конструкции шагающей платформы является ограниченное количество передвижных опор (8 опор), в результате чего платформа пригодна для использования только на плотных грунтах. Кроме того, оснащение прямоугольными вспомогательными устройствами не позволяет осуществлять одинаковой величины перемещения платформы в продольном и поперечном направлениях и ее вращения вокруг вертикальной оси.
Известна шагающая платформа, содержащая рабочую и вспомогательную платформы, смонтированные с возможностью поступательно-поворотного перемещения друг относительно друга посредством механизмов для их перемещения и подвижных опор (см. патент на полезную модель Украины №38578, МПК8 B60P 3/00 от 2008 г. - прототип).
Недостатком прототипа является то, что рабочая платформа выполнена составной из двух, верхней и нижней, частей, разнесенных между собой по высоте. Таким образом, внутри рабочей платформы образуется пространство, в котором размещается вспомогательная платформа.
Это усложняет конструкцию всей платформы, так как в нижней части рабочей платформы (на ее наиболее нагруженном среднем участке) необходимо выполнить проемы для обеспечения перемещения в горизонтальном направлении подвижных опор вспомогательной платформы.
Размеры и конфигурация этих проемов должны обеспечивать при передвижении (шагании) платформы взаимное перемещение рабочей и вспомогательной платформ друг относительно друга как в прямолинейном (продольном и поперечном) направлении, так и при повороте всей платформы. Количество этих проемов обусловлено количеством подвижных опор вспомогательной платформы.
Из-за выполнения проемов нижняя часть рабочей платформы оказывается ослабленной в самом нагруженном месте.
Для компенсации ослабления нижней части рабочей платформы потребуется увеличение размеров ее поперечных сечений, что приведет к увеличению высотных габаритов всей платформы и увеличению ее металлоемкости.
Также недостатком конструкции прототипа является то, что платформа имеет ограниченный размерами проемов угол поворота при каждом шаге, вследствие чего траектория поворота платформы будет иметь достаточно большой радиус при изменении направления движения. За счет этого увеличиваются энергозатраты на обеспечение изменения направления движения.
Техническим результатом заявляемого изобретения является упрощение конструкции шагающей платформы, уменьшение ее металлоемкости и энергозатрат при изменении направления движения.
Указанный технический результат достигается в шагающей платформе, содержащей рабочую и вспомогательные платформы, смонтированные с возможностью поступательно-поворотного перемещения друг относительно друга посредством механизмов для их перемещения и подвижных опор, тем, что вспомогательная платформа размещена под рабочей платформой, а между ними смонтирован ползун, снабженный механизмом поступательного перемещения, при этом ползун соединен с рабочей платформой посредством поворотного соединения и механически связан со вспомогательной платформой посредством зацепов.
Указанный технический результат достигается также в шагающей платформе тем, что поворотное соединение ползуна с рабочей платформой выполнено в виде опорно-поворотного подшипника и снабжено механизмом поворотного перемещения.
На фиг.1 показана заявляемая шагающая платформа, вид сбоку;
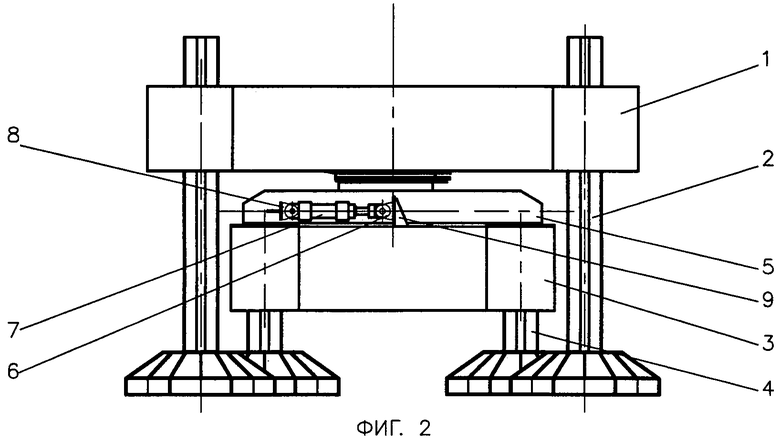
на фиг.2 - то же, вид спереди;
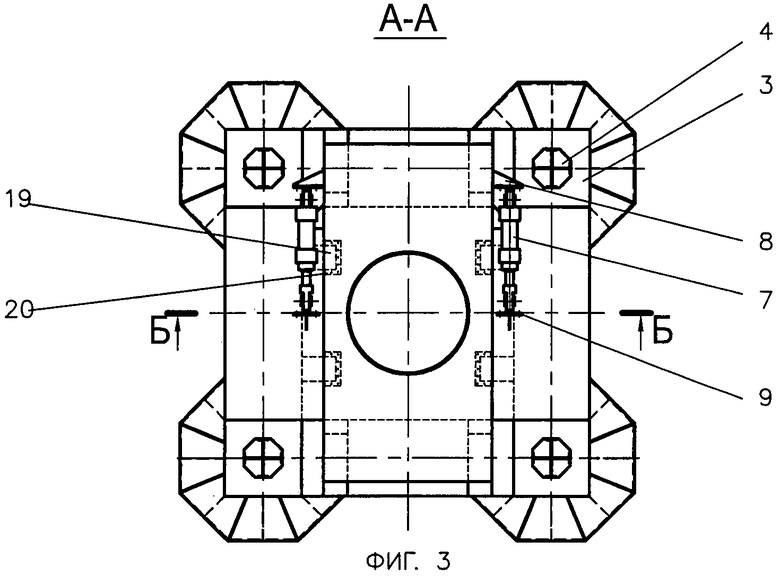
на фиг.3 - разрез А-А, фиг.1;
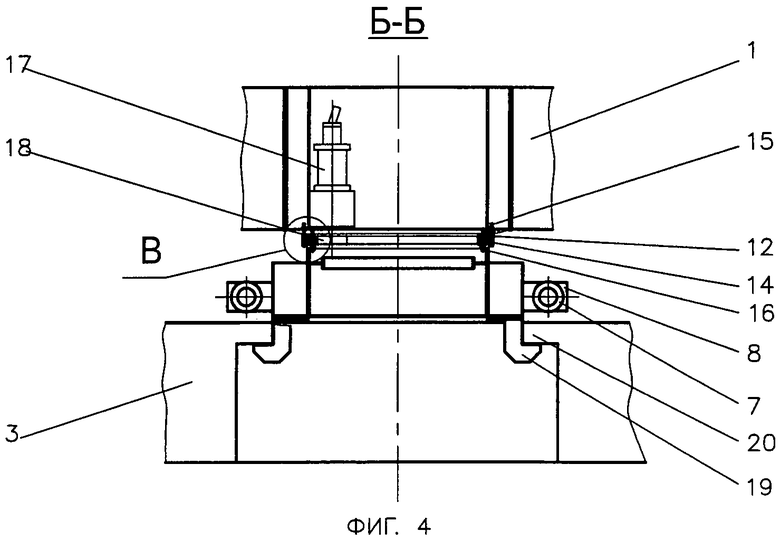
на фиг.4 - разрез Б-Б, фиг.3;
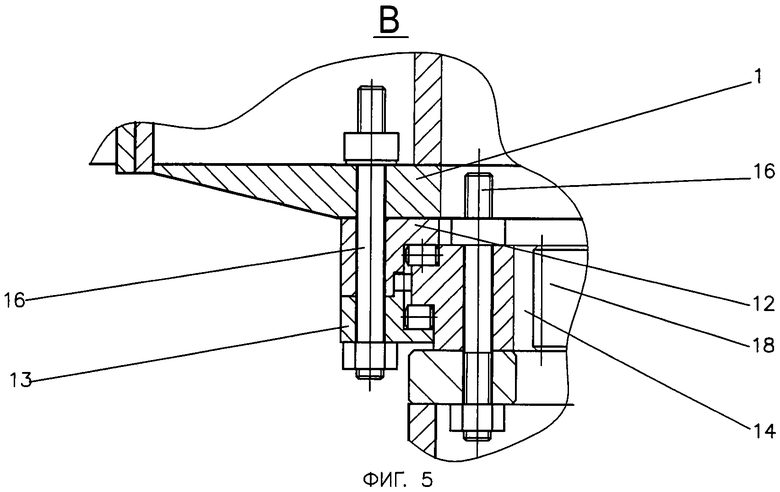
на фиг.5 - узел В, фиг.4.
Заявляемая шагающая платформа включает в себя рабочую платформу 1 с подвижными опорами 2 и вспомогательную платформу 3 с подвижными опорами 4. Вспомогательная платформа 3 с подвижными опорами 4 размещена под рабочей платформой 1, а между ними расположен ползун 5, снабженный механизмом поступательного перемещения 6, который выполнен в виде гидроцилиндров 7. На ползуне 5 установлены кронштейны 8, а на вспомогательной платформе 3 - кронштейны 9. Ползун 5 соединен с рабочей платформой 1 посредством поворотного соединения 10, которое выполнено в виде опорно-поворотного подшипника, например роликовой опоры 11 со смонтированными с возможностью вращения друг относительно друга верхним кольцом 12 и нижним кольцом 13 с зубьями 14 и шпильками 15 и 16. Верхнее кольцо 12 шпильками 15 (жестко) соединено с рабочей платформой 1, нижнее кольцо 13 шпильками 16 (жестко) соединено с ползуном 5. Механизм поворота 17 установлен на рабочей платформе 1, и его шестерня 18 входит во взаимодействие через зубья 14 с нижним кольцом 13 роликовой опоры 11. При этом ползун 5 снабжен зацепами 19, взаимодействующими с буртами 20, смонтированными на вспомогательной платформе 3.
Передвижение заявляемой шагающей платформы и изменение направления ее движения производится следующим образом.
Подвижные опоры 2 рабочей платформы 1 опускают вниз на грунт до положения, пока зацепы 19 не вступят во взаимодействие с буртами 20, и вспомогательная платформа 3 вместе с подвижными опорами 4 не приподнимется, и ее подвижные опоры 4 не оторвутся от грунта. При этом между ползуном 5 и вспомогательной платформой 3 образуется зазор.
Если шагающей платформе необходимо перемещаться в продольном направлении, то перемещают вспомогательную платформу 3 вместе с подвижными опорами 4 с помощью гидроцилиндров 7, которые, упираясь в кронштейны 8 на ползуне 5, толкают ее подвижными опорами 4 через смонтированные на ней кронштейны 9 на требуемое расстояние. При этом вспомогательная платформа 3 вместе с подвижными опорами 4 перемещается, скользя буртами 20 по зацепам 19.
При этом движении, поскольку ползун 5 через роликовую опору 11 с шпильками 15 и 16 связан с рабочей платформой 1, вспомогательная платформа 3 вместе с подвижными опорами 4 перемещается относительно рабочей платформы 1.
После перемещения вспомогательной платформы 3 опускают ее подвижные опоры 4 до упора в грунт и выборки зазора между ползуном 5 и вспомогательной платформой 3. При дальнейшем подъеме вспомогательной платформы 3 на опорах 4 через ползун 5 приподнимается рабочая платформа 1 и ее подвижные опоры 2 отрываются от грунта. Если при этом положении ввести в работу гидроцилиндры 7, то обеспечивается продольное перемещение рабочей платформы 1 относительно вспомогательной платформы 3.
Если при этом положении сначала ввести в работу механизм поворота 17 и повернуть рабочую платформу 1 на роликовой опоре 11 на любой требуемый угол, а затем ввести в работу гидроцилиндры 7, то при повороте на угол 90° обеспечивается изменение продольного перемещения платформы на поперечное.
При повороте на угол, меньший 90°, обеспечивается изменение продольного перемещения шагающей платформы на перемещение с поворотом.
На этом заканчивается шаг перемещения шагающей платформы.
После завершения шага для его повторения опускают подвижные опоры 4 вспомогательной платформы 3 до упора в грунт и повторяют операции по подъему вспомогательной платформы 3 и описанные выше операции.
Таким образом, в заявленной конструкции шагающей платформы за счет введения в ее конструкцию ползуна с поворотным соединением в виде роликовой опоры 11 обеспечивается изменение ее движения с любым необходимым углом поворота.
За счет этого при передвижении шагающей платформы уменьшаются энергозатраты на выполнение шагов ее перемещения с изменением направления движения.
Кроме того, упрощается конструкция рабочей платформы 1, так как в ней исключены пазы и вырезы для подвижных опор 4 вспомогательной платформы 3. За счет этого снижается металлоемкость шагающей платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| ШАГАЮЩИЙ ХОД И САМОХОДНАЯ МАШИНА НА ЕГО ОСНОВЕ | 2011 |
|
RU2452647C1 |
| ЛЕСОПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2247019C2 |
| РОТОРНЫЙ ПОДЛОЖКОДЕРЖАТЕЛЬ | 2012 |
|
RU2543023C2 |
| Турникет для крепления длинномерного груза на сцепе транспортных платформ | 1990 |
|
SU1792852A1 |
| БОЛОТОХОДНАЯ ШАГАЮЩАЯ МАШИНА | 2023 |
|
RU2809311C1 |
| РОЛИКОВЫЕ КОНЬКИ | 2003 |
|
RU2252809C2 |
| Способ хранения и транспортировки аппарели | 2024 |
|
RU2828370C1 |
Изобретение относится к области гидротехнических сооружений. Шагающая платформа содержит рабочую и вспомогательные платформы, смонтированные с возможностью поступательно-поворотного перемещения друг относительно друга посредством механизмов для их перемещения и подвижных опор. Вспомогательная платформа размещена под рабочей платформой. Между платформами смонтирован ползун, снабженный механизмом поступательного перемещения. Ползун соединен с рабочей платформой посредством поворотного соединения и механически связан со вспомогательной платформой посредством зацепов. Упрощается конструкция шагающей платформы, снижается ее металлоемкость и энергозатраты при изменении направления движения. 1 з.п. ф-лы, 5 ил.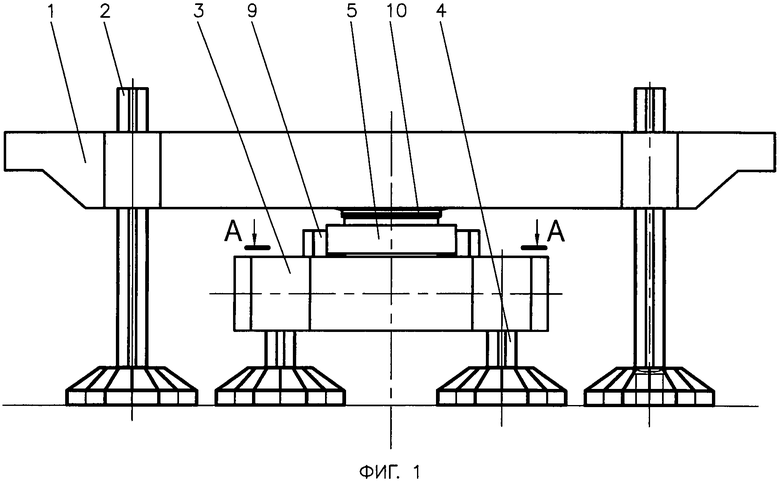
1. Шагающая платформа, содержащая рабочую и вспомогательные платформы, смонтированные с возможностью поступательно-поворотного перемещения относительно друг друга посредством механизмов для их перемещения и подвижных опор, отличающаяся тем, что вспомогательная платформа размещена под рабочей платформой, а между ними смонтирован ползун, снабженный механизмом поступательного перемещения, при этом ползун соединен с рабочей платформой посредством поворотного соединения и механически связан со вспомогательной платформой посредством зацепов.
2. Шагающая платформа по п.1, отличающаяся тем, что поворотное соединение ползуна с рабочей платформой выполнено в виде опорно-поворотного подшипника и снабжено механизмом поворотного перемещения.
| ФОРМА КОРПУСА СУДНА | 1927 |
|
SU38578A1 |
| Самоподъемная морская платформа для производства гидротехнических работ и способ их проведения посредством самоподъемной платформы | 1992 |
|
SU1831546A3 |
| WO 9208007 A1, 14.05.1992 | |||
| Монтажная платформа для сборки и разборки опорных колонн | 1983 |
|
SU1079744A1 |
| Способ возведения и эксплуатации наплавного гидротехнического сооружения и устройство для его осуществления | 1989 |
|
SU1791527A1 |
| US 4288177 A, 08.09.1981. | |||

