Изобретение относится к технике и технологии нанесения на изделия нанопокрытий в целях повышения их потребительских свойств. Решение может быть использовано в различных областях: машиностроении, приборостроении, медицине, ювелирном деле. Оно ориентировано на различные типы производств (от массового до единичного).
Ионно-плазменные технологии обладают исключительными, недоступными другим технологиям свойствами повышения качества поверхностного слоя изделий. Вместе с тем их применение в значительной степени ограничивается высокой стоимостью, энергоемкостью, длительностью технологического цикла. Развитие данных технологий идет в направлении объединения сложно совместимых свойств. Особую актуальность представляет задача формирования следующего ряда свойств:
высокое качество осаждаемого слоя и возможность доступа ко всем обрабатываемым поверхностям подложки за один установ, высокая производительность и при этом гибкость, ресурсосбережение, удобство обслуживания.
Эффективным направлением работ по выполнению перечисленных требований является разработка технологической оснастки - держателей подложек с принципиально новыми отличительными признаками грузонесущей поверхности (ГРП), содержащей места для размещения подложек - грузонесущие элементы (ГРЭ) и средства их фиксации.
Известен модульный подложкодержатель роторного типа для использования в одно- и многопозиционных магнетронных установках для нанесения нанопокрытий [Подложкодержатель и установка для нанесения покрытий методом магнетронного распыления на его основе, патент №2 437 964, МПК С23С 14/35, С23С 14/56, авторы Мирошникова В.Д., Жданов А.В., Мирошникова Т.Д., Лизюков Е.В., Смолин П.В.]. Насадка-ротор с местами для размещения и фиксации подложек каждого модуля соединена с приводом, установлена с помощью поворотной державки на оси с возможностью автономного поштучного или группового перемещения в одну из фиксированных позиций: ожидания или рабочую с размещением обрабатываемых поверхностей всех подложек по нормали к вектору потока распыляемого материала. Подложкодержатели оборудованы корпусами с механизмами их перемещения и датчиками управления по времени выстоя. Для их размещения внутри платформы выполнены площадки, которые оборудованы направляющими, жестко закрепленными снизу плоскости перекрытия по границам проемов в направлении от периферии к центру платформы двумя упорами: стационарным, смонтированным на внутреннем обводном каркасе платформы и откидным, смонтированным на внешнем обводном каркасе платформы на затворе, фиксаторами положения корпуса подложкодержателя на направляющих. Насадка может быть предназначена как для группы, так и для одного изделия, иметь различную геометрическую форму. Признаки подложкодержателя направлены на получение актуальной совокупности свойств: высокое качество покрытий при максимально допустимой плотности размещения изделий, высокую производительность и гибкость, ресурсосбережение, удобство обслуживания. При высокой плотности размещения изделий исключено перекрытие поверхностей, на которые должно производиться распыление материала мишени. Решение позволяет существенно повысить значение коэффициента использования полезного объема вакуумной камеры. Увеличение количества обрабатываемых изделий существенно повышает производительность установки, в том числе, за счет сокращения непроизводительных потерь, связанных с вхождением установки в рабочий режим и выходом из него. Это имеет, в том числе, в качестве положительного эффекта ресурсосбережение - снижение энергозатрат, повышение ресурса мишени. Время выполнения установочных перемещений подложек из позиции ожидания в рабочую позицию минимально. Также незначительно время совершения установочных перемещений из одной позиции обработки в другую. Модуль подложкодержателя является первичным структурным элементом в реализации принципов групповой технологии нанесения покрытий. На его основе формируются различные технологические маршруты. В позиции обработки модули могут выходить в различной последовательности. В позицию обработки одновременно могут выходить как все модули подложкодержателя, так и какой-либо один из них. Время выдержки может быть различно. Размещенные на подложкодержателе изделия находятся в стационарном состоянии, перемещения модулей из позиции ожидания в рабочую позицию - установочные. Вместе с тем в решении отсутствуют конструктивные признаки, позволяющие проводить распыление на все требуемые поверхности подложки за один установ. Решение контролирует качество нанопокрытий только на поверхностях нормальных потоку. Это предопределяет его специализацию, ограничивает области использования.
Техническим эффектом предлагаемого изобретения является обеспечение возможности доступа рабочей среды ко всем обрабатываемым поверхностям подложки за один установ, повышение производительности, гибкости, удобства обслуживания, ресурсосбережение.
Указанный технический эффект достигается тем, что роторный подложкодержатель, включающий, по меньшей мере, один модуль, состоящий, по меньшей мере, из одной насадки-ротора, с размещенным на ней, по меньшей мере, одним грузонесущим элементом и образующим ее грузонесущую поверхность, установленной с помощью поворотной державки на опоре, закрепленной в выдвижном корпусе подложкодержателя, с возможностью автономной поштучной, а также групповой передачи в одну из фиксированных позиций: ожидания или обработки и соединенной с приводом поворота, а также датчика контроля по времени выстоя, выполнен с насадкой-ротором смонтированной на поворотной державке с возможностью совершения относительно нее поворотов в рабочей позиции и оснащеной приводом поворота, при этом поворотная державка содержит лючок, в его корпусе установлен упорный шарикоподшипник, на нем опорным диском установлен вал, в нижней части которого жестко смонтирована коническая шестерня, сверху вал зажат вторым упорным шарикоподшипником, в верхней части конструкции лючка смонтирован затвор с отверстием для выхода верхней части вала, на которую неподвижно установлена насадка-ротор, опора модульного подложкодержателя имеет сборную цилиндрическую конструкцию, внешний контур опоры образован неподвижной направляющей втулкой, представляющей собой пустотелый цилиндр с поперечным пазом, выполненным в месте установки модуля, прорезающим направляющую втулку в верхней части до оси и завершающимся радиусными выкружками, в верхней точке для свободного заведения в опору конической шестерни, установленной на конце вала, паз расширен двумя симметрично расположенными радиусными выкружками, длина паза равняется 1/2 длины окружности направляющей втулки, ширина паза в местах бокового огибания профиля направляющей втулки определяется диаметром вала насадки-ротора, а в верхней - центральной части диаметром конической шестерни, установленной на конце вала, внутри опоры, в направляющей втулке, установлен шлицевой вал, с насаженной на нем головкой, на конце которой с помощью неразъемного подвижного соединения установлена шестерня со шлицевым отверстием, в нижнюю часть головки ввинчен стержень, внешний контур направляющей втулки охватывает втулка перемещения, выполненная в виде широкого кольца с пазом, имеющим вид полувитка спирали, с шагом, равным шагу перемещения головки, обеспечивающим перемещение головки с шестерней вдоль шлицевого вала на расстояние, достаточное для ее вхождения в зацепление с конической шестерней вала насадки-ротора, на одном из концов втулка имеет опорное кольцо, а на внешней стороне три ребра жесткости, размещенные друг относительно друга под углом 120°, в каждом из ребер жесткости выполнено по одному резьбовому отверстию, посредством которых втулка перемещения крепится с помощью винтов к обойме поворотной державки, на направляющей втулке со стороны диаметрально противоположной поперечному пазу выполнен продольный паз, который при совмещении со спиралевидным пазом втулки перемещения может образовывать отверстие, через который проходит стержень, шлицевой вал соединен с приводом поворота и установлен на несущих стенках корпуса подложкодержателя, конструкция корпуса имеет базовую и ригельную части, базовая часть служит для размещения подложкодержателя и содержит в нижней полости позицию ожидания насадок-роторов и расположенные по концам опоры подложкодержателя кронштейны, один из кронштейнов выполнен со съемной головкой, фиксируемой винтами, приводной конец шлицевого вала пропущен в сквозное отверстие разъемного кронштейна и далее соединен посредством муфты с приводом поворота, на свободном конце шлицевого вала установлен шарикоподшипник, который зафиксирован в концевой опоре, имеющей квадратное поперечное сечение и установленной в имеющий ответный профиль паз, выполненный в противоположно расположенном кронштейне, направляющая втулка выполнена с корончатыми торцами, имеющими, по меньшей мере, по два симметрично расположенных зубца и неподвижно защемлена с обеих торцов в пазах, выполненных в верхней части кронштейнов в виде отверстий со срезанными прямолинейно боковыми гранями, в ригельной части размещен привод поворота насадок-роторов подложкодержателя.
Перечень фигур чертежей.
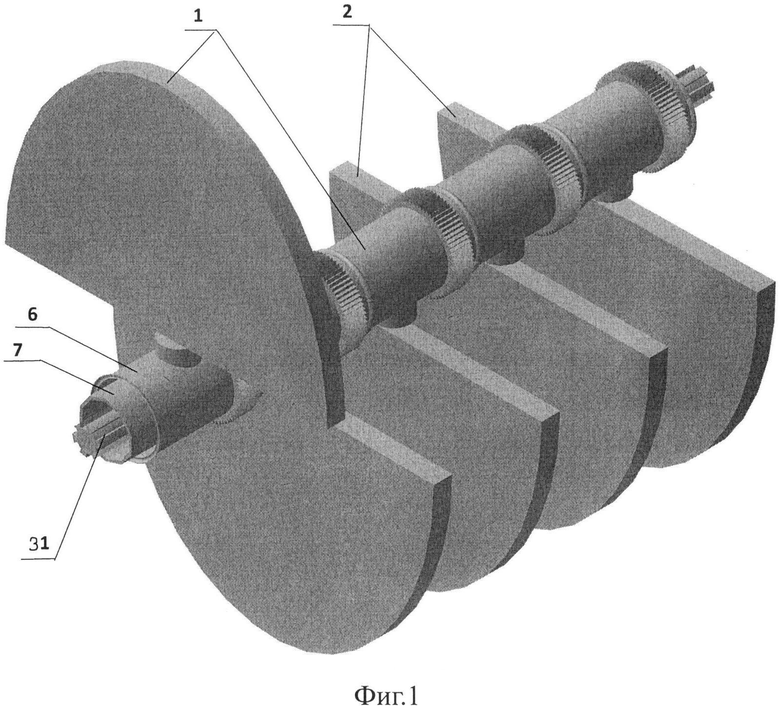
Фиг.1. Общий вид модульного роторного подложкодержателя с поворотными в вертикальной плоскости насадками - роторами.
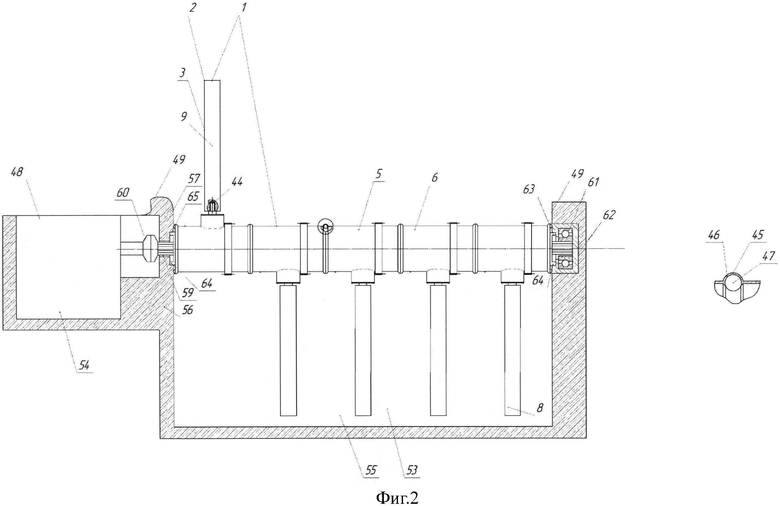
Фиг.2. Схема установки подложкодержателя в секции платформы.
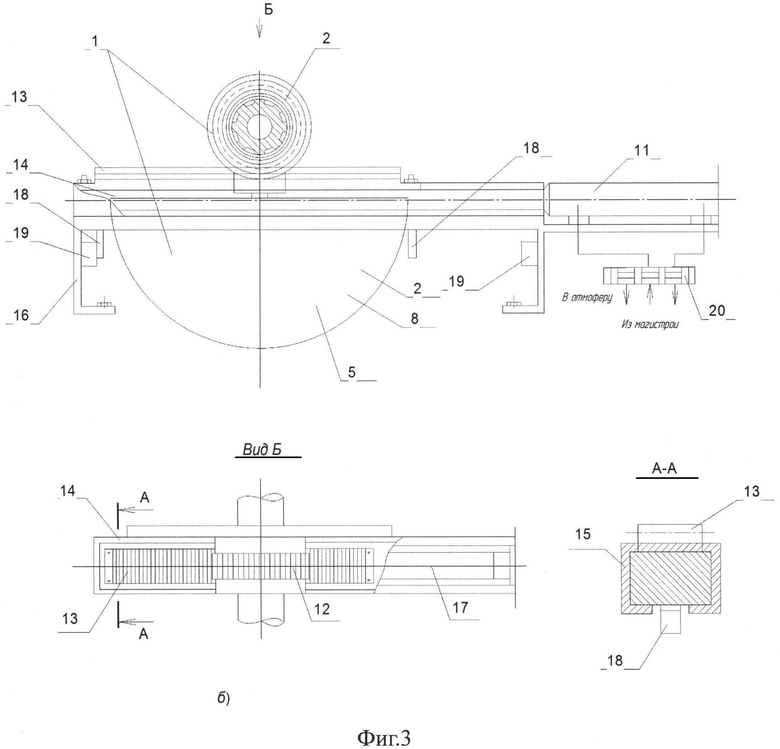
Фиг.3. Подложкодержатель в сборе с механизмом привода перемещения насадок-роторов в рабочую позицию и позицию ожидания. Схема размещения кулачков системы управления приводом подложкодержателя.
Фиг.4. Механизм поворота насадки - ротора в рабочей позиции.
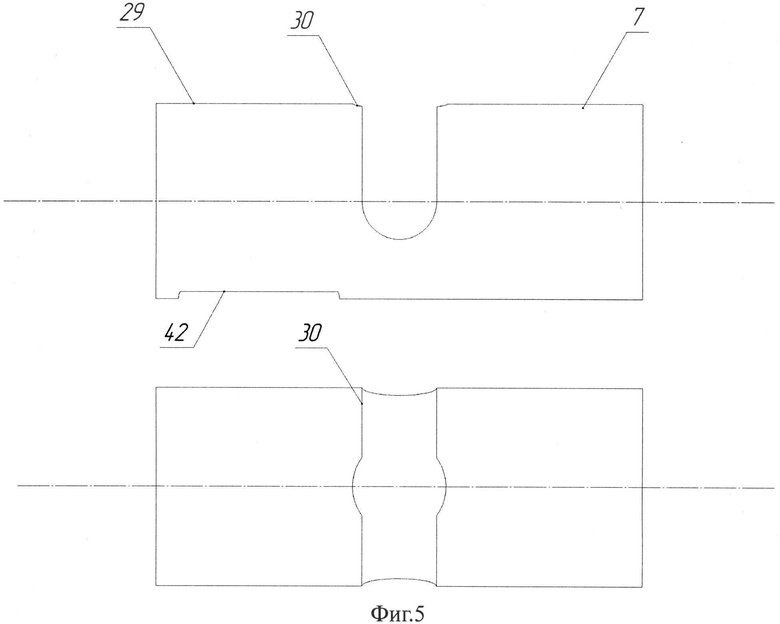
Фиг.5. Направляющая втулка.
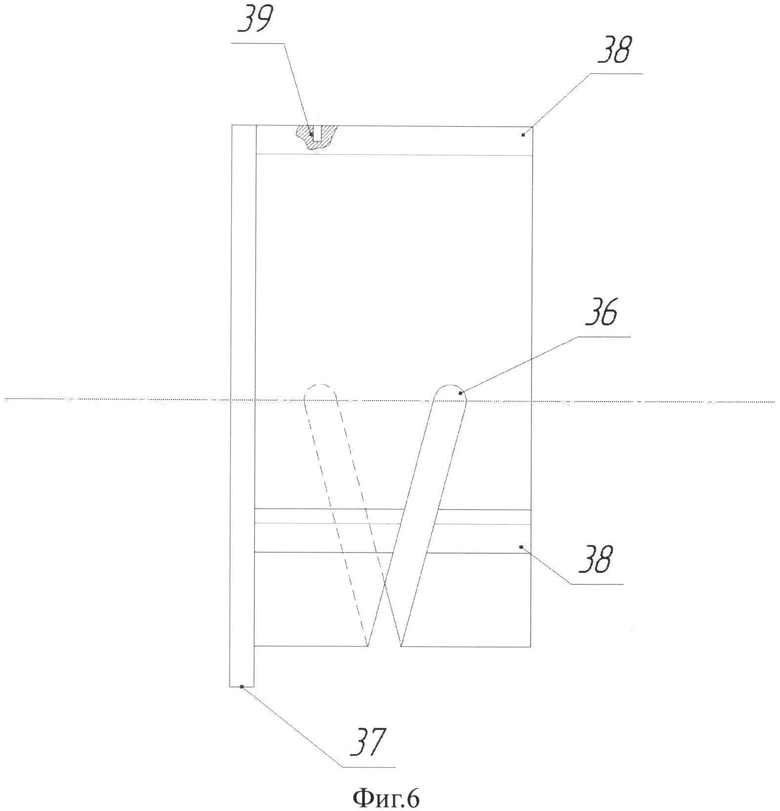
Фиг.6. Втулка перемещения головки.
На фиг.1 показан модульный подложкодержатель 1 роторного типа с поворотными относительно вертикальной оси насадками-роторами 2. Составляющие его грузонесущую поверхность 3 грузонесущие элементы 4 распределены по модулям 5. В качестве ГРЭ могут использоваться крючки, защелки, стержни, адаптеры, отверстия, в том числе резьбовые, профили планок, различные в продольном, поперечном направлении и др. В модуле 5 ГРЭ 4 размещают на насадке-роторе 2. С этой целью она оснащена установочными элементами и элементами фиксации подложек (не показаны). Насадка-ротор 2 может быть предназначена как для группы, так и для одного изделия - подложки, иметь различную геометрическую форму. Модули 5 выполнены в виде подвижного соединения насадки-ротора 2 с поворотной державкой 6. С помощью державки 6 модули 5 устанавливаются на опоре 7. Соединение насадки 2 с поворотной державкой 6 может быть как неразъемным так и разъемным. Подложкодержатель 1 оснащен приводом автономного поворота модулей 5 из позиции ожидания 8 в рабочую позицию 9 и последующего возврата в позицию 8 (см. фиг.2). Привод поворота выполнен в виде зубчатого механизма 10 с реечным зацеплением, соединенного с поршневым приводом двухстороннего действия 11. Зубчатый механизм 10 включает эвольвентный профиль 12, выполненный на части поворотной державки 6, и рейку 13, жестко соединенную с ползуном 14, установленным в направляющих 15 с возможностью выполнения возвратно-поступательных перемещений. Привод поворота модулей подложкодержателя 1 в горизонтальной плоскости смонтирован на каркасе 16 со сквозным пазом 17 для кулачков 18, установленных на нижней части ползуна 14, с возможностью контакта с концевыми выключателями 19, размещенными на каркасе 16, соединенных с распределителем (золотником) 20. Для автоматического управления приводом поворота в конструкции предусмотрены датчики времени (не показаны). Механизм поворота насадки-ротора 2 в рабочей позиции 9 показан на фиг.3. Насадка-ротор 2 установлена на валу 21. В нижней части вала 21 жестко смонтирована коническая шестерня 22. Поворотная державка 6 насадки-ротора 2 включает лючок 23. В корпусе 24 лючка 23 установлен упорный шарикоподшипник 25, на который установлен опорным диском 26 вал 21. Сверху вал 21 зажимается вторым упорным шарикоподшипником 27. В верхней части конструкции лючка 23 смонтирован затвор 28. Опора 7 модульного подложкодержателя 1 имеет сборную цилиндрическую конструкцию. Внешний контур опоры 7 образован неподвижной направляющей втулкой 29, представляющей собой пустотелый цилиндр с поперечными пазами 30, выполненными в местах установки модулей 5 (см. фиг.4). Пазы прорезают направляющую втулку 29 в верхней части до оси и завершаются радиусными выкружками. В верхней точке паз 30 расширен двумя симметрично расположенными радиусными выкружками, для свободного заведения конической шестерни 22, установленной на конце вала 21 в опору 7. Длина направляющей втулки 29 зависит от длины модуля 5 и количества модулей 5 подложкодержателя 1. Размеры паза 30 определяются следующими условиями: длина паза 30 равняется 1/2 длины окружности направляющей втулки 29, ширина паза 30 в местах бокового огибания профиля направляющей втулки 29 определяется диаметром вала 21 насадки-ротора 2, а в верхней - центральной части диаметром конической шестерни 22, установленной на конце вала 21. Внутри опоры 7, в направляющей втулке 29, установлен шлицевой вал 31. На валу 31 насажены головки 32, по количеству модулей 5. На конце головки 32 установлена шестерня 33 со шлицевым отверстием, с которой она связана неразъемным подвижным соединением. В нижнюю часть головки 32 ввинчен приводной стержень 34. Внешний контур направляющей втулки 29 охватывают втулки перемещения 35 по количеству модулей 5 (см. фиг.5). Каждая из втулок перемещения 35 выполнена в виде широкого кольца со спиралевидным пазом 36, выполненным в виде полувитка, с шагом, равным шагу перемещения головки 32, обеспечивающим перемещение головки 32 с шестерней 33 вдоль шлицевого вала 31 на расстояние, достаточное для ее вхождения в зацепление с конической шестерней 22 вала 21 насадки-ротора 2. На одном из концов втулка имеет опорное кольцо 37, а на внешней стороне - три ребра жесткости 38, размещенные друг относительно друга под углом 120°. В каждом из ребер жесткости 38 выполнено по одному резьбовому отверстию 39, посредством которых втулка перемещения 35 крепится с помощью винтов 40 к обойме 41 поворотной державки 6. На направляющей втулке 29 со стороны, диаметрально противоположной поперечному пазу 30, выполнен продольный паз 42, который при совмещении со спиралевидным пазом 36 втулки перемещения 35 может образовывать отверстие 43, через которое проходит стержень 34. Крепление насадок-роторов 2 к поворотной державке 6 осуществляется за счет резьбового соединения 44. Для предотвращения трения между боковыми поверхностями поворотных державок 6 модулей 5 между ними размещен узел качения 45, выполненный в виде профильных полусферических дорожек 46 на торцах обойм 41 с насыпными шариками 47. Шлицевой вал 31 соединен с приводом поворота 48 и установлен на несущих стенках 49 выдвижного по роликовым направляющим 50 корпуса 51 из платформы 52 установки для нанесения покрытий. Конструкция выдвижного корпуса 51 имеет две части: базовую 53 и ригельную 54. Базовая часть 53 служит для размещения подложкодержателя 1 и содержит в нижней полости 55 позицию ожидания 8 насадок-роторов 2 и расположенные по концам опоры 7 подложкодержателя 1 кронштейны 56. Один из кронштейнов 56 выполнен со съемной головкой 57, фиксируемой винтами 58. Приводной конец шлицевого вала 31 пропущен в сквозное отверстие 59 разъемного кронштейна 56 и далее соединен посредством муфты 60 с приводом поворота 48. На свободном конце шлицевого вала 31 установлен шарикоподшипник 61, который зафиксирован в концевой опоре 62. Концевая опора 62 имеет квадратное поперечное сечение и устанавливается в имеющий ответный профиль паз 63, выполненный в противоположно расположенном кронштейне 56. Направляющая втулка 29 выполнена с корончатыми торцами, имеющими, по меньшей мере, по два симметрично расположенных зубца 64 и неподвижно защемлена с обеих торцов в пазах 65, выполненных в верхней части кронштейнов 56 в виде отверстий со срезанными прямолинейно боковыми гранями. В ригельной части размещен привод поворота насадок-роторов подложкодержателя.
Подложкодержатель 1 роторного типа работает следующим образом. При поступлении управляющего сигнала зубчатая рейка 13 модуля 5 получает от поршневого привода 11 поступательное перемещение. Поступательное перемещение зубчатой рейки 13 преобразуется зубчато-реечным механизмом 10 в поворотное перемещение державки 6 относительно шлицевого вала 31 опоры 7 и соответственно установленной на ней насадки-ротора 2 с подложками относительно горизонтальной оси в рабочую позицию 9. Одновременно с поворотом обоймы 41 требуемого модуля 5 происходит поворот втулки перемещения 35 относительно направляющей втулки 29. При этом отверстие, образованное перекрытием пазов, выполненных на втулках 35 и 29, перемещается вдоль продольного паза направляющей втулки 29. Ведомый в отверстии приводной стержень 34 и жестко связанная с ним головка 32 с конической шестерней 33 перемещаются в направлении расположения конической шестерни 22, установленной на валу 21 модуля 5 подложкодержателя 1. За поворот обоймы 41 на угол, равный 180°, головка 32 совершает продольное перемещение, достаточное для вхождения шестерни 33 в зацепление с шестерней 22, установленной на валу 21 державки 6 насадки-ротора 2. При зацеплении шестерен 33 и 22, образующих зубчатую передачу, крутящий момент от шлицевого вала 31 передается на приводной вал 21 модуля 5 подложкодержателя 1. Отключение ее движения осуществляется посредством воздействия кулачков 18, перемещающихся по пазу 17 в каркасе 16, на концевые выключатели 19. Время нахождения модуля 5 подложкодержателя 1 в рабочей позиции 9 контролируется датчиками времени. Установка насадки-ротора с возможностью совершения ей поворотных перемещений позволяет использовать ее в нескольких режимах. Основной режим непрерывного вращения ГРП предусмотрен для доступа рабочей среды ко всем обрабатываемым поверхностям подложек за один установ. Кроме того, основной режим не исключает установочных перемещений ГРП для односторонней обработки подложек. В режиме нанесения покрытий на одну сторону подложек в рабочую позицию выходит насадка-ротор с двухсторонним размещением подложек. Сначала обрабатываются изделия, закрепленные на одной стороне ГРП насадки-ротора, затем, после ее поворота, на другой стороне.
Взаимосвязь признаков изобретения с заявленным техническим эффектом
Разработка предлагаемой конструкции велась в направлении создания динамичных грузонесущих поверхностей, свойства которых наиболее значимо проявляются в рабочей позиции, влияют на улучшение ряда характеристик позиции ожидания, а также суммарное время передачи подложек из одной позиции в другую. В заявленной конструкции роторного подложкодержателя объединены два неоспоримых качества: возможность выхода в рабочую позицию востребованной насадки и возможность ее поворота. При этом оригинальным решением привода поворота обеспечена его миниатюризация и возможность размещения внутри цилиндрической опоры небольшого диаметра. Использование держателей подложек данной конструкции изменяет технологическую среду нанесения покрытий в направлении повышения ее универсальности, гибкости, производительности, ресурсосбережения, получения более качественных покрытий. При сохранении свойств прототипа обеспечена возможность доступа рабочей среды ко всем обрабатываемым поверхностям подложки за один установ. Это является сильным, ранее недоступным преимуществом магнетронных систем. Для совершения поворотных перемещений используется пространство над соседними насадками-роторами, расположенными внизу, в позиции ожидания. Поворачивающаяся над другими насадками-рамами ГРП занимает большой объем. Это ведет к более рациональному использованию рабочего пространства установки. Выполнение ГРП поворотной ведет к более активному рассредоточению подложек в вакуумном пространстве, снижает вероятность перекрытия поверхностей, способствует повышению качества покрытия (в частности, формированию одинаковой толщины его слоя на всех поверхностях подложек), увеличению результативности использования создаваемого потока, источника плазмы. По отношению к прототипу вместимость насадки-ротора повышается до двух раз при незначительном увеличении ширины ее конструкции. Дополнительно появляется время на совершение установочного перемещения - поворота второй стороны. Но при этом исключается время на выход в рабочую позицию и затем передачу в позицию ожидания каждой второй насадки-ротора. Вместимость позиции ожидания по отношению к прототипу наращивается за счет сокращения количества насадок-роторов. Это позволяет экономить вспомогательное время и время вхождения в рабочий режим, повышает производительность. Насадка может быть специализирована как для размещения группы изделий, так и для одного изделия. Что делает универсальным применение насадки и, соответственно, использующих ее магнетронных установок, дает возможность расширить маркетинговые предложения. Повышение гибкости подложкодержателей с поворотной насадкой состоит в расширении вариантов использования, соответственно, более уверенной работе в различных типах производств, быстрой сменности насадок. Следует совокупно указать, что повышение производительности определяется увеличением количества обрабатываемых поверхностей, экономией вспомогательного времени и времени вхождения в рабочий режим. Новые возможности роторных держателей подложек ведут к дополнительному существенному улучшению других потребительских свойств магнетронных установок по отношению к прототипу (с вариантом подложкодержателя односторонней рамочной конструкции) - повышению загрузки, удобству обслуживания, более рациональному использованию мишени, электроэнергии. Возможность одновременной загрузки в позицию ожидания большого количества подложек на насадках-рамах с развитой ГРП, их поочередная передача в рабочую позицию в любой заданной последовательности в сочетании с обработкой всех поверхностей изделий за один установ, за счет поворота ГРП, является неоспоримым конкурентным преимуществом. Заявленное в техническом эффекте удобство обслуживания состоит в его простоте. Съемные, сменные, вращающиеся насадки делают навес грузов простым и эффективным.
Кроме того, группа изобретений с полученной совокупностью признаков может быть эффективно использована в ряде других областей. Среди них повсеместно распространенные рекламное и демонстрационное дело, изготовление витрин. Назначение не меняется, но появляются новые дополнительные эффекты. В первом варианте использования на ГРП размещают предназначенную для прочтения или просмотра информацию. Время выстоя насадок-рамок в рабочей позиции контролируется системой управления. Во втором варианте использования на ГРП размещают, например, ювелирные изделия. Поочередно поднимающиеся поворотные насадки со сверкающими своими гранями драгоценностями создают восхитительную картину, помогая впечатлительным натурам принять решение о покупке. Кроме того, подвижный объект больше обращает на себя внимание. Активный контакт с внешней средой достигается улучшением обзорных свойств ГРП: все поверхности изделий доступны взгляду потребителя. Следующим масштабным потребителем держателей грузов с новыми потребительскими свойствами является машиностроение. В этом случае держатели грузов рассматриваются, например, в качестве накопителей заготовок, деталей, межоперационного задела, режущих и вспомогательных инструментов. Совокупность признаков группы изобретений в этой области своего применения также создает новый эффект. Наряду с компактностью зоны ожидания, увеличением коэффициента использования рабочей зоны резко сокращается время доступа к ГРЭ, кратно повышается производительность. Для машиностроительного комплекса это принципиально новый подход к решению задачи повышения производительности и новый вид накопителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ МАГНЕТРОННЫМ РАСПЫЛЕНИЕМ И ДЕРЖАТЕЛЬ ПОДЛОЖЕК НА ЕГО ОСНОВЕ | 2012 |
|
RU2539487C2 |
| Корончатый подложкодержатель | 2017 |
|
RU2673253C2 |
| ПОДЛОЖКОДЕРЖАТЕЛЬ И УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ МЕТОДОМ МАГНЕТРОННОГО РАСПЫЛЕНИЯ НА ЕГО ОСНОВЕ | 2010 |
|
RU2437964C2 |
| ГИБКАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА | 2012 |
|
RU2510320C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИНСТРУМЕНТАЛЬНОГО ОБЕСПЕЧЕНИЯ | 2010 |
|
RU2436665C1 |
| СПОСОБ ОБМЕНА ГРУЗАМИ, УСТРОЙСТВО ОБМЕНА ГРУЗАМИ, СПОСОБ ФОРМИРОВАНИЯ ГРУЗОНЕСУЩЕЙ ПОВЕРХНОСТИ НАКОПИТЕЛЯ И ГИБКАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА НА ИХ ОСНОВЕ | 2011 |
|
RU2486045C1 |
| УСТРОЙСТВО ХРАНЕНИЯ (НАКОПЛЕНИЯ) ШТУЧНЫХ ГРУЗОВ | 2008 |
|
RU2408517C2 |
| Автомат для обмотки роторов электрических машин | 1972 |
|
SU540582A3 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| МНОГОШПИНДЕЛЬНЫЙ ПОЛУАВТОМАТ | 1966 |
|
SU222843A1 |
Изобретение относится к технике для нанесения на изделия нанопокрытий, в частности к роторному подложкодержателю. Роторный подложкодержатель выполнен модульным. Модуль состоит из насадки-ротора, установленной с помощью поворотной державки на опоре и соединенной с приводом поворота, и датчика контроля времени в позиции ожидания. Опора подложкодержателя концевыми частями закреплена в выдвижном корпусе. Она имеет сборную цилиндрическую конструкцию и включает направляющую втулку, втулку перемещения, шлицевой вал. Насадка-ротор имеет возможность автономной поштучной, а также групповой передачи в одну из фиксированных позиций: ожидания или обработки. Насадка-ротор смонтирована на валу, установленном в лючке державки с возможностью совершения относительно нее поворотов в рабочей позиции. Вал посредством смонтированной в его нижней части конической шестерни при поступлении насадки-ротора в рабочую позицию получает вращательное перемещение от конической шестерни головки, смонтированной на шлицевом валу с возможностью возвратно-поступательных перемещений. Подача головки в зону зацепления осуществляется посредством двух пересекающихся пазов, один из которых расположен на направляющей втулке, другой - на втулке перемещения. Технический результат заключается в обеспечении возможности доступа рабочей среды ко всем обрабатываемым поверхностям подложки за один установ. 6 ил. 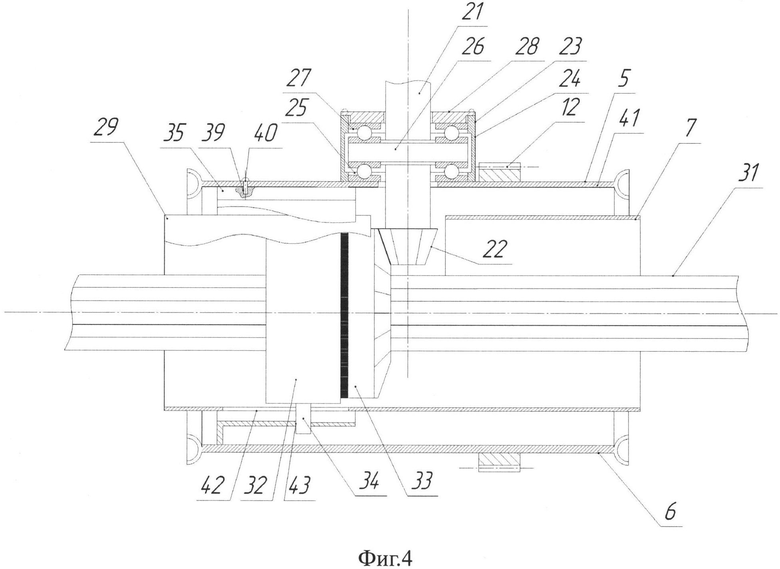
Роторный подложкодержатель, содержащий, по меньшей мере, один модуль, состоящий, по меньшей мере, из одной насадки-ротора, установленной на поворотной державке, которая размещена на опоре, закрепленной в выдвижном корпусе подложкодержателя, соединенной с приводом поворота и датчиком управления временем в позиции ожидания и имеющей возможность передачи насадки-ротора в одну из фиксированных позиций ожидания или обработки, отличающийся тем, что державка снабжена приводом поворота для обеспечения вращения насадки-ротора в позиции обработки, при этом поворотная державка содержит лючок, в корпусе которого установлен упорный шарикоподшипник, в котором посредством опорного диска установлен вал, в нижней части вала жестко смонтирована коническая шестерня, сверху вал зажат вторым упорным шарикоподшипником, в верхней части конструкции лючка смонтирован затвор с отверстием для выхода верхней части вала, на которой неподвижно установлена насадка-ротор, опора модуля имеет сборную цилиндрическую конструкцию, внешний контур опоры образован неподвижной направляющей втулкой в виде пустотелого цилиндра с поперечным сквозным пазом с радиусными выкружками на концах, выполненным в месте установки модуля, при этом в верхней точке для свободного заведения в опору конической шестерни, установленной на конце вала, паз расширен двумя симметрично расположенными радиусными выкружками до размера, превышающего диаметр конической шестерни на величину технологического зазора, определяемого процессом сборки опоры, на боковых поверхностях направляющей втулки ширина паза превышает диаметр вала насадки-ротора на величину зазора, установленного требованиями сборки опоры, при этом длина паза равна 1/2 длины окружности направляющей втулки, причем внутри опоры в направляющей втулке установлен шлицевой вал с насаженной на нем головкой, на конце которой с помощью неразъемного подвижного соединения установлена шестерня со шлицевым отверстием, в нижнюю часть головки ввинчен стержень, внешний контур направляющей втулки охватывает втулка перемещения, выполненная в виде кольца с пазом в виде полувитка спирали с шагом, равным шагу перемещения головки, обеспечивающим перемещение головки с шестерней вдоль шлицевого вала на расстояние, достаточное для ее вхождения в зацепление с конической шестерней вала насадки-ротора, на одном из концов втулка имеет опорное кольцо, а на внешней стороне - три ребра жесткости, размещенные друг относительно друга под углом 120°, в каждом из ребер жесткости выполнено по одному резьбовому отверстию, посредством которых втулка перемещения прикреплена с помощью винтов к обойме поворотной державки, на направляющей втулке со стороны, диаметрально противоположной поперечному пазу, выполнен продольный паз с возможностью образования отверстия для прохода стержня при совмещении со спиралевидным пазом втулки перемещения, шлицевой вал соединен с приводом поворота и установлен на несущих стенках корпуса подложкодержателя, конструкция корпуса имеет базовую и ригельную части, при этом базовая часть выполнена с нижней полостью для размещения в ней насадок-роторов в позиции ожидания и содержит расположенные по концам опоры подложкодержателя кронштейны, один из которых выполнен разъемным со съемной головкой, фиксируемой винтами, приводной конец шлицевого вала пропущен в сквозное отверстие разъемного кронштейна и соединен посредством муфты с приводом поворота, на свободном конце шлицевого вала установлен шарикоподшипник, который зафиксирован в концевой опоре, имеющей квадратное поперечное сечение и которая установлена в имеющий ответный профиль паз, выполненный в противоположно расположенном кронштейне, направляющая втулка выполнена с корончатыми торцами, имеющими, по меньшей мере, по два симметрично расположенных зубца и неподвижно защемлена с обоих торцов в пазах, выполненных в верхней части кронштейнов в виде отверстий со срезанными прямолинейно боковыми гранями, а в ригельной части размещен привод поворота насадок-роторов подложкодержателя.
| ПОДЛОЖКОДЕРЖАТЕЛЬ И УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ МЕТОДОМ МАГНЕТРОННОГО РАСПЫЛЕНИЯ НА ЕГО ОСНОВЕ | 2010 |
|
RU2437964C2 |
| УСТАНОВКА ДЛЯ ЭЛЕКТРОННО-ЛУЧЕВОГО НАНЕСЕНИЯ ПОКРЫТИЙ | 2004 |
|
RU2265078C1 |
| Устройство для нанесения покрытий на изделия | 1991 |
|
SU1824458A1 |
| Устройство для ионно-плазменной обработки подложек в вакууме | 1985 |
|
SU1405361A1 |
| RU2058427C1, 20.04.1996 | |||
| JP 2009161817A ,23.07.2009; | |||
| DE 102006028977 A1 ,27.12.2007 | |||
| US6196154B1 ,06.03.2001 | |||

