Изобретение относится к балансировочным станкам, в частности к элементам конструкции станка, и предназначено для бесконтактного оптико-электронного измерения геометрических параметров и указания мест установки грузов при балансировке колес.
Цикл балансировки колеса состоит из следующих шагов:
a) ввод геометрических параметров плоскостей коррекции колеса, закрепленного на валу балансировочного станка;
b) измерение дисбаланса колеса путем вращения колеса и измерения возникающих центробежных сил и расчет масс корректирующих грузов;
c) закрепление корректирующих грузов в определенные места;
d) контрольное измерение дисбаланса и расчет масс дополнительных корректирующих грузов;
e) при превышении масс дополнительных корректирующих грузов заданного предельного значения - выполнение шага с.
Таким образом производительность балансировочного оборудования зависит от следующих факторов в порядке понижения степени влияния:
- количества циклов «измерение дисбаланса - установка грузов»;
- сокращения времени выполнения каждого шага, в основном за счет сокращения действий оператора.
В свою очередь, количество циклов «измерение дисбаланса - установка грузов» зависит, в частности, от:
- точности ввода геометрических параметров плоскостей коррекции;
- отклонения фактических мест закрепления грузов расчетным.
Рассмотрим сначала подробнее точность ввода геометрических параметров плоскостей коррекции, а точнее - окружностей, образованных пересечением плоскости коррекции, перпендикулярной оси вращения вала балансировочного станка, и обода колеса: дистанцию L от определенной плоскости станка, перпендикулярной оси вращения вала, и радиус R окружности, на которой размещаются грузы.
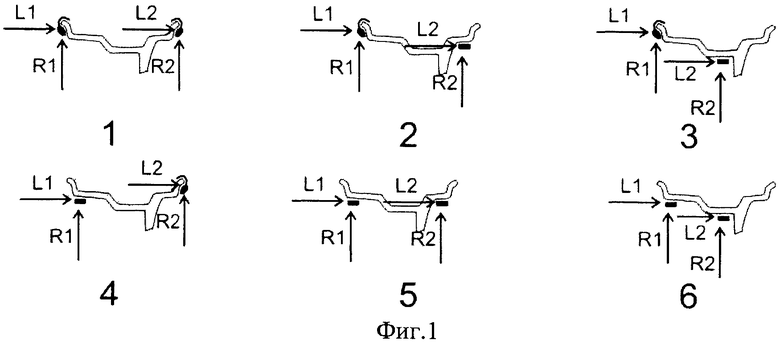
На фиг.1 схематично на сечении обода показаны возможные схемы размещения грузов, где
L1, L2 - дистанции до плоскостей;
R1, R2 - радиусы.
Конкретную схему при балансировке колеса выбирает оператор, исходя из конструктивных, эстетических и прочих требований.
Существуют различные способы определения параметров L1, R1, L2, R2.
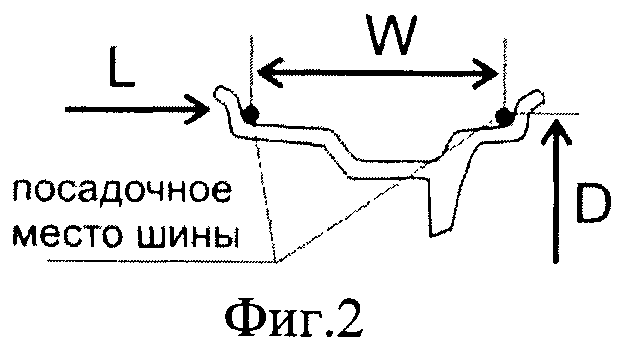
Традиционный способ заключается во вводе параметров колеса: диаметра D, ширины W и дистанции до обода L, как показано на фиг.2, с последующим расчетом параметров плоскостей коррекции L1, R1, L2, R2 по приблизительным эмпирическим формулам.
Такой способ дает удовлетворительную погрешность определения L1, R1, L2, R2 для схемы 1, показанной на фиг.1, т.к. положения грузов, крепящихся за закраины обода, физически близки к посадочным местам шины и поэтому эмпирические формулы достаточны точны. Но для остальных схем погрешность может быть высокой из-за большого разнообразия конструкций ободьев колес и отсутствия унификации мест крепления ленточных грузов. Кроме этого, традиционно закрепление ленточных грузов, используемых в схемах 2, 3, 4, 5, 6, фиг.1, ведется вручную без каких-либо устройств и ориентиров для соблюдения дистанций L1 и L2. Тем не менее, такой способ используется во многих простых балансировочных станках, см. например [1].
Известно изобретение [2], где описан способ бесконтактного определения параметров плоскостей коррекции с использованием оптоэлектронной системы сканирования, которая измеряет параметры всего профиля обода с двух сторон, и, таким образом, определяются исходные данные для измерения параметров плоскостей коррекции L1, R1, L2, R2.
Недостатком данного изобретения является отсутствие способа указания оператором конкретного места на профиле, выбранного для закрепления грузов, а также отсутствие способа указания места закрепления ленточных грузов на заданной дистанции L1 и/или L2.
Наиболее хороший результат дает группа способов, реализующих так называемое «прямое измерение» в сочетании с точной установкой груза на требуемой дистанции. При этом способе производится непосредственное измерение параметров L1, R1, L2, R2. Поэтому погрешность определяется только свойствами измерительных средств и не зависит от конкретной конструкции колеса и субъективных решений оператора при выборе места крепления грузов. Пример реализации такого способа с помощью электромеханической линейки с зажимом для закрепления грузов описан в [3], а также описано устройство в [4].
Недостатком данного способа является наличие изнашиваемых подвижных механических узлов с люфтами, которые нестабильны и снижают точность измерений, а также некоторые неудобства в использовании, связанные с тем, что измерения и установка грузов ведется в верхней невидимой для оператора внутренней части обода.
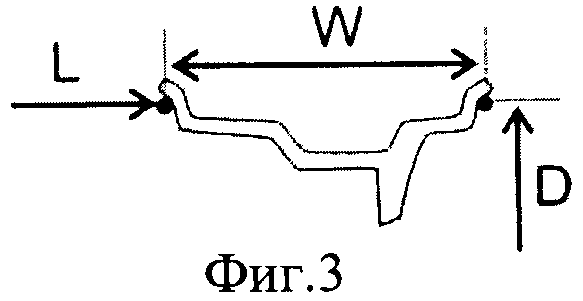
Наиболее близким к предложенному способу является способ измерения диаметра и вылета диска автомобильного колеса на балансировочном станке, заключающийся в том, что измерение диаметра и вылета диска колеса производят бесконтактно с диском колеса путем преобразования электронных образов, полученных с установленного на станине станка оптического приемного устройства, картина образа которого является проекцией сечения измеряемого диска колеса, отраженного от торца обода и торца ступицы диска колеса с помощью, по меньшей мере, одного лазерного излучателя, также установленного на станине станка, луч которого преобразован в расположенную вертикально прямолинейную узкую световую полоску [5]. В [5] предлагается модификация традиционного способа ввода геометрических параметров, а именно ввод параметров не посадочных мест шины, а непосредственно торцов обода, т.е. мест закрепления грузов, крепящихся за закраины обода, фиг.3, путем бесконтактного измерения.
Данная модификация повышает точность определения параметров L1, R1, L2, R2 для грузов, крепящихся за закраины обода по схеме 1, показанной на фиг.1. Но для остальных схем, где L1, R1, L2, R2 вычисляются по приблизительным эмпирическим формулам, погрешность остается высокой из-за большого разнообразия конструкций ободьев колес и отсутствия унификации мест крепления ленточных грузов. Кроме этого, для закрепления ленточных грузов, используемых в схемах 2, 3, 4, 5, 6, не предлагается никаких устройств и способов для соблюдения дистанций L1 и L2.
Наиболее близким к предложенному устройству является устройство для балансировки, включающее, в частности, балансировочный станок, устройство индикации местоположения груза, контактное или бесконтактное сенсорное устройство и устройство обратной связи при бесконтактном сенсорном устройстве, закрепленные на станке [6].
Недостатками устройства-прототипа является наличие устройства обратной связи, что усложняет конструкцию; размещение бесконтактного сенсорного устройства на перемещаемом основании, что приведет к долговременной нестабильности измерений из-за механического износа; наличие одного устройства индикации местоположения груза, что при динамической балансировке в двух плоскостях не позволит без перемещения указателя одновременно индицировать положение двух грузов.
Задача изобретения - повышение производительности труда за счет обеспечения точного измерения геометрических параметров плоскостей коррекции и обеспечения закрепления грузов точно в расчетных местах как на закраинах обода, так и в средней части обода для ленточных грузов, что обеспечивает балансировку за один цикл и сокращение действий оператора, а также повышение надежности и долговременной стабильности измерений геометрических параметров.
В предлагаемом изобретении предлагается способ и устройство, обеспечивающие как точное определение параметров плоскостей коррекции L1, R1, L2, R2, так и установку грузов на требуемые дистанции и в требуемое угловое положение с минимумом действий оператора.
Поставленная задача достигается тем, что в способе измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке, заключающемся в том, что измерение геометрических параметров и указание мест закрепления грузов производят устройствами индикации местоположения указанием плоскостей коррекции путем создания, по меньшей мере, одной световой метки на ободе колеса, указывающей предполагаемые места закрепления грузов, определяют геометрические параметры указанных плоскостей коррекции с помощью бесконтактного измерительного устройства и вычислительного устройства и после определения масс и угловых параметров положения грузов закрепляют грузы в места, индицируемые световыми метками, согласно изобретению измерение геометрических параметров, и указание места последующего закрепления груза для каждой плоскости коррекции производят одним действием оператора с помощью одного и того же устройства индикации местоположения и независимо от типа груза, выбирают количество световых меток, размещенных с одной или с двух сторон колеса, равным количеству плоскостей коррекции с каждой стороны, управляя каждым устройством индикации местоположения, наводят световую метку на любое место обода, выбранное для закрепления груза любого типа как на торцевую, так и на цилиндрическую поверхность, оставляя световые метки в этих положениях, при этом каждую световую метку преобразуют в цифровые коды с помощью измерительной оптической стереосистемы, состоящей из двух бесконтактных измерительных устройств, передавая цифровые коды в вычислительное устройство, с помощью которого вычисляют геометрические параметры положения грузов любого типа, как равные положениям световых меток, в последующем закрепляют грузы в местах, указанных световыми метками, поворачивая колесо по показаниям датчика углового положения вала до совпадения рассчитанного углового места закрепления груза и углового положения световой метки и совмещая центр груза с центром световой метки. А также в способе измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке размещают по два бесконтактных измерительных устройства с двух сторон относительно колеса, с помощью вычислительного устройства производят смену режимов индикации, указывающих оператору текущее состояние: измерение геометрических параметров, закрепление груза в указанное место или иное состояние. В способе измерения геометрических параметров плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке грузы, закрепляемые на кромку обода, устанавливают в вертикально верхнюю точку, определяемую как визуально, так и по световой линии на ободе, создаваемой дополнительным индикатором.
В устройстве измерения геометрических параметров плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке, содержащем балансировочный станок, устройство индикации местоположения, установленное на станине балансировочного станка, бесконтактное измерительное устройство, установленное на станине балансировочного станка и подключенное к вычислительному устройству, датчик углового положения вала, подключенный к вычислительному устройству, согласно изобретению дополнительно введены второе устройство индикации местоположения для второй плоскости коррекции, бесконтактное измерительное устройство, образующее с первым бесконтактным измерительным устройством единую измерительную оптическую стереосистему, расположенную с одной стороны колеса и подключенную к вычислительному устройству. В устройстве измерения геометрических параметров плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке дополнительно введены третье устройство индикации местоположения и вторая пара бесконтактных измерительных устройства, образующих единую измерительную оптическую стереосистему, расположенные с другой стороны колеса и подключенные к вычислительному устройству. В устройстве измерения геометрических параметров плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке каждое устройство индикации местоположения выполнено в виде лазерного излучателя, подвижно закрепленного на станине балансировочного станка. В устройстве измерения геометрических параметров плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке каждое устройство индикации местоположения выполнено в виде светодиодного излучателя, неподвижно закрепленного на станине балансировочного станка. А также в устройстве измерения геометрических параметров плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке каждое бесконтактное измерительное устройство выполнено в виде цифровой оптической камеры, неподвижно закрепленной на станине балансировочного станка.
На фиг.4 представлена конструкция предложенного устройства измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке, содержащая балансировочный станок 1, устройства индикации местоположения грузов 2, бесконтактные измерительные устройства 3, вычислительное устройство 4 с индикатором 9, датчик углового положения вала 5.
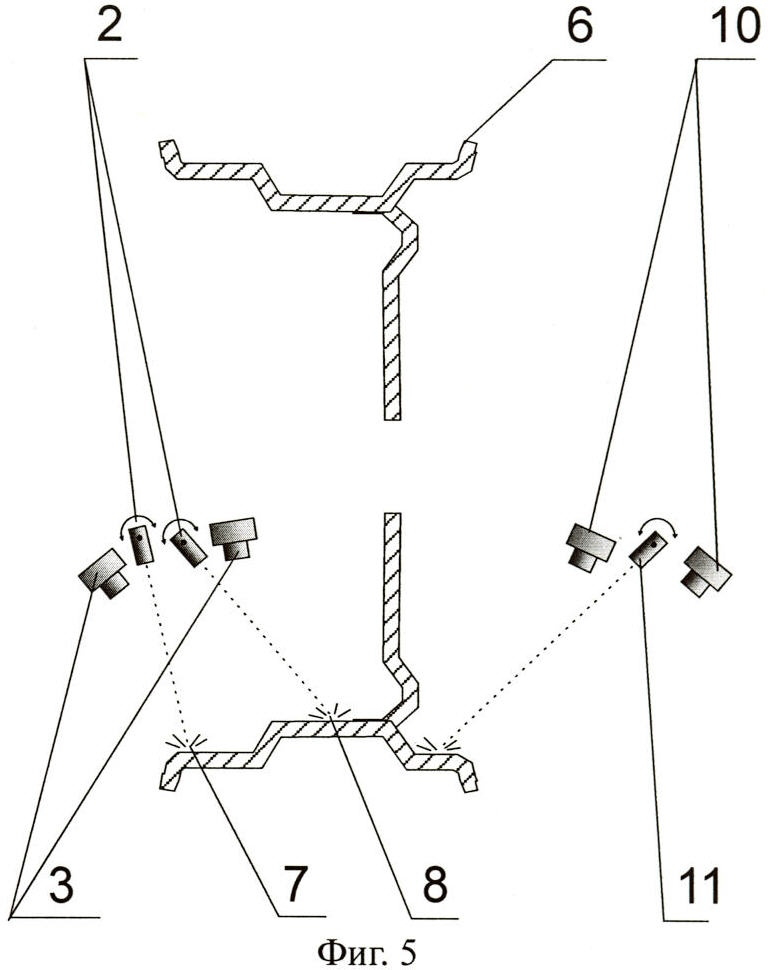
В предложенном способе световые лучи от двух устройств индикации местоположения 2, вращающихся вокруг неподвижной относительно корпуса балансировочного станка 1 оси, падают на обод 6 в места предполагаемого закрепления грузов, как показано на фиг.5. Положения устройств индикации местоположения 2 фиксируют. Полученные световые метки 7 и 8 используются сначала для измерения геометрических параметров L1, D1, L2, D2, а затем для указания мест закрепления грузов.
В процессе измерения каждая световая метка преобразуется в цифровой код двумя бесконтактными измерительными устройствами 3, выполненными в виде оптических камер, закрепленными неподвижно относительно корпуса балансировочного станка 1, образующими оптическую стереосистему. Полученный цифровой код поступает в вычислительное устройство 4, которое вычисляет геометрические параметры L1, D1, L2, D2.
Поскольку устройства индикации местоположения 2 не изменили положения, при которых производилось измерение, закрепление грузов производят в места, указанные световыми метками 7 и 8, т.о. обеспечивая точное положение грузов на дистанции и диаметру.
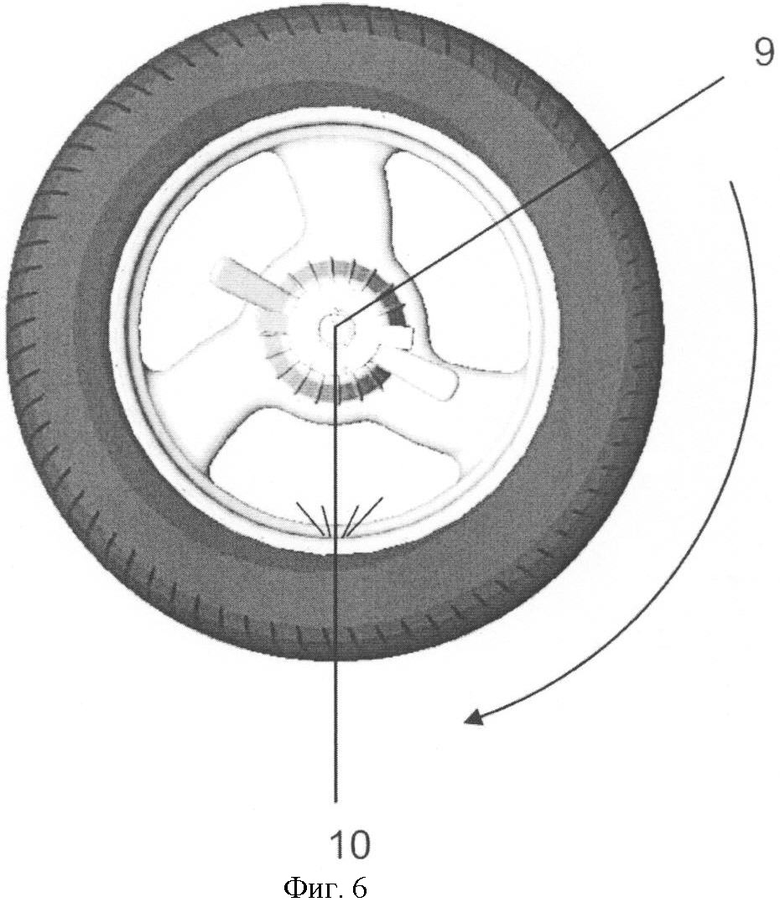
Для обеспечения точного углового положения поворачивают колесо так, чтобы совпали требуемое угловое положение места закрепления 9 груза и угловое положение световой метки 10 (фиг.6). Для этого используют значения, получаемые от датчика углового положения вала, на котором закреплено колесо. Колесо может поворачиваться автоматически или вручную по индикаторам вычислительного устройства 4.
Аналогично можно провести измерения и закрепление грузов и с наружной стороны колеса (фиг.5), используя также два бесконтактных измерительных устройства 10 и только одно устройство индикации местоположения 11, так как снаружи можно закрепить не более одного груза.
Дополнительно указанным способом можно определять радиальные и торцевые биения обода, а также отклонения от идеальной формы путем измерения геометрических параметров в нескольких точках в процессе вращения колеса.
Предложенный способ наиболее удобен и важен для закрепления ленточных грузов, которые наклеиваются на внутренней поверхности обода 6. Для этого лучше направлять источники света на нижнюю часть обода 6. Но внизу неудобно крепить грузы со скобками. Однако места крепления грузов со скобками определены конструкцией колеса - на закраине обода 6, поэтому при их креплении не требуется указывать положения по дистанции. Для обеспечения же их углового положения можно закреплять такие грузы, например, в вертикально верхнюю точку обода:
1) визуально примерно;
2) используя фиксированные световые указатели, закрепленные неподвижно относительно корпуса балансировочного станка 1, создающие вертикальную световую линию на ободе.
Вычислительное устройство 4 может также управлять каждым устройством индикации 2 и 11, включая их, выключая или мигая с различной частотой для индикации оператору состояний:
1) идет измерение геометрических параметров;
2) необходимо закрепить груз в указанное место;
3) другие состояния.
Источники информации
1. Станок балансировочный модель СБМК-60. Руководство по эксплуатации. СБМК-60.000.00 РЭ.
2. Патент США №7199873, G01M 1/22, 2005 г.
3. «Станок балансировочный модель СБМП-60/3D. Руководство по эксплуатации. СБМП-603Д.000.00 РЭ».
4. Патент США №5447064, G01M 1/04, 1995 г.
5. Патент РФ №2365887, G01M 1/032, 2009 г.
6. Патент США №6244108, G01M 1/032, 2001 г.
Изобретение относится к балансировочной технике, в частности к элементам конструкции балансировочных станков, и может быть использовано для бесконтактного измерения геометрических параметров и указания мест установки грузов при балансировке колес. Способ заключается в том, что измерение геометрических параметров и указание мест закрепления грузов производят устройствами индикации местоположения указанием плоскостей коррекции путем создания, по меньшей мере, одной световой метки на ободе колеса, указывающей предполагаемые места закрепления грузов. При этом определяют геометрические параметры указанных плоскостей коррекции с помощью бесконтактного измерительного устройства и вычислительного устройства и после определения масс и угловых параметров положения грузов закрепляют грузы в места, индицируемые световыми метками. При этом выбирают количество световых меток, размещенных с одной или с двух сторон колеса, равным количеству плоскостей коррекции с каждой стороны, управляя каждым устройством индикации местоположения, наводят световую метку на любое место обода, выбранное для закрепления груза любого типа, как на торцевую, так и на цилиндрическую поверхность, оставляя световые метки в этих положениях. Каждую световую метку преобразуют в цифровые коды с помощью измерительной оптической стереосистемы, состоящей из двух бесконтактных измерительных устройств, передавая цифровые коды в вычислительное устройство, с помощью которого вычисляют геометрические параметры положения грузов любого типа, как равные положениям световых меток. Затем закрепляют грузы в местах, указанных световыми метками, поворачивая колесо по показаниям датчика углового положения вала до совпадения рассчитанного углового места закрепления груза и углового положения световой метки и совмещая центр груза с центром световой метки. Технический результат заключается в повышении производительности, а также повышение надежности и долговременной стабильности измерений геометрических параметров. 3 н. и 8 з.п. ф-лы, 6 ил.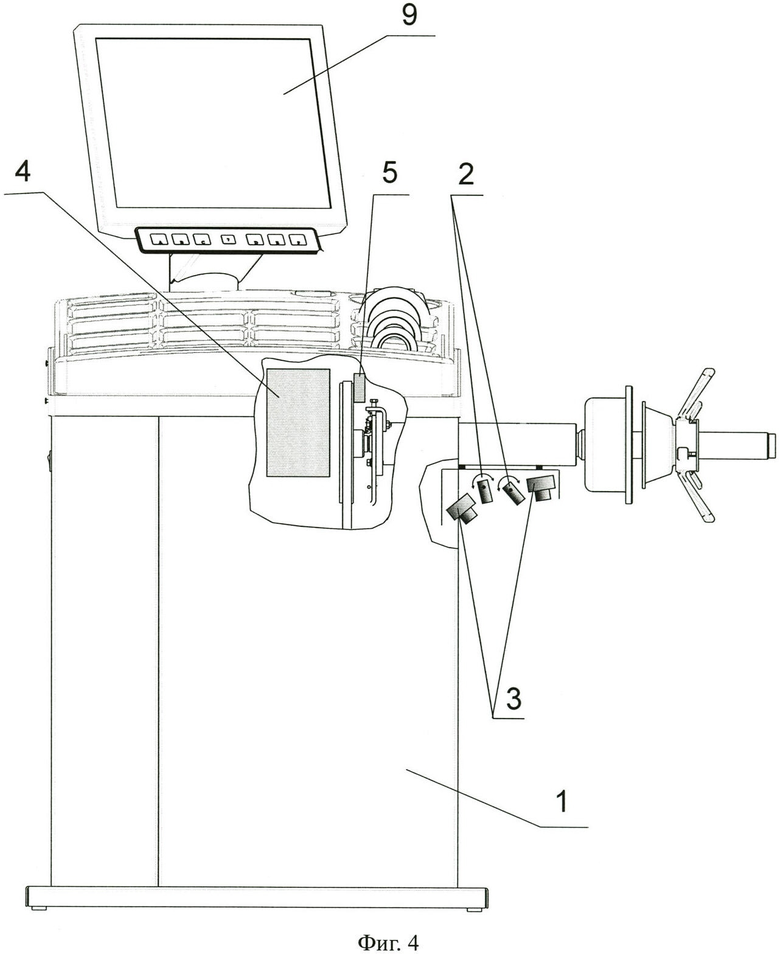
1. Способ измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке, заключающийся в том, что измерение геометрических параметров и указание мест закрепления грузов производят устройствами индикации местоположения с помощью указания плоскостей коррекции путем создания, по меньшей мере, одной световой метки на ободе колеса, указывающей предполагаемые места закрепления грузов, определяют геометрические параметры указанных плоскостей коррекции с помощью бесконтактного измерительного устройства и вычислительного устройства и после определения масс и угловых параметров положения грузов закрепляют грузы в места, индицируемые световыми метками, отличающийся тем, что измерение геометрических параметров и указание места последующего закрепления груза для каждой плоскости коррекции производят одним действием оператора с помощью одного и того же устройства индикации местоположения и независимо от типа груза, выбирают количество световых меток, размещенных с одной или с двух сторон колеса, равным количеству плоскостей коррекции с каждой стороны, управляя каждым устройством индикации местоположения, наводят световую метку на любое место обода, выбранное для закрепления груза любого типа, как на торцевую, так и на цилиндрическую поверхность, оставляя световые метки в этих положениях, при этом каждую световую метку преобразуют в цифровые коды с помощью бесконтактного измерительного устройства, представляющего собой измерительную оптическую стереосистему, размещенную неподвижно относительно станины станка с одной стороны колеса, и, возможно, с помощью второй оптической стереосистемы, размещенной в определенном положении относительно станины станка с другой стороны колеса, передавая цифровые коды в вычислительное устройство, с помощью которого вычисляют геометрические параметры положения грузов любого типа, как равные положениям световых меток, в последующем закрепляют грузы в каждой плоскости коррекции в местах, указанных световыми метками, поворачивая колесо по показаниям датчика углового положения вала до совпадения рассчитанного углового места закрепления груза и углового положения световой метки и совмещая центр груза с центром световой метки.
2. Способ измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке по п.1, отличающийся тем, что с помощью вычислительного устройства производят смену режимов индикации, указывающих оператору, что идет измерение геометрических параметров, закрепление груза в указанное место или иное состояние.
3. Способ измерения геометрических параметров плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке по п.1, отличающийся тем, что грузы, закрепляемые на кромку обода, устанавливают в вертикально верхнюю точку, определяемую как визуально, так и по световой линии на ободе, создаваемой дополнительным индикатором.
4. Устройство измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке, содержащее балансировочный станок, устройство индикации местоположения, установленное на станине балансировочного станка, бесконтактное измерительное устройство, подключенное к вычислительному устройству, датчик углового положения вала, подключенный к вычислительному устройству, отличающееся тем, что дополнительно введено второе устройство индикации местоположения для второй плоскости коррекции, бесконтактное измерительное устройство, образующее с первым бесконтактным измерительным устройством единую измерительную оптическую стереосистему, расположенную с одной стороны колеса и подключенную к вычислительному устройству.
5. Устройство измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке по п.4, отличающееся тем, что дополнительно введены третье устройство индикации местоположения и вторая пара бесконтактных измерительных устройств, образующих единую измерительную оптическую стереосистему, расположенные с другой стороны колеса и подключенные к вычислительному устройству.
6. Устройство измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке по пп.4 и 5, отличающееся тем, что каждое устройство индикации местоположения выполнено в виде лазерного излучателя, неподвижно закрепленного на станине балансировочного станка.
7. Устройство измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке по пп.4 и 5, отличающееся тем, что каждое устройство индикации местоположения выполнено в виде светодиодного излучателя, неподвижно закрепленного на станине балансировочного станка.
8. Устройство измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке по пп.4 и 5, отличающееся тем, что каждое бесконтактное измерительное устройство выполнено в виде оптической камеры, неподвижно закрепленной на станине балансировочного станка.
9. Устройство измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке, содержащее балансировочный станок, устройство индикации местоположения, установленное на станине балансировочного станка, бесконтактное измерительное устройство, подключенное к вычислительному устройству, датчик углового положения вала, подключенный к вычислительному устройству, отличающееся тем, что дополнительно введено второе бесконтактное измерительное устройство ввода геометрических параметров, создающее, как и первое бесконтактное измерительное устройство световую метку на ободе для визуального наведения на требуемое место при измерении и для обозначения места при установке груза, причем указанные бесконтактные измерительные устройства расположены с одной стороны колеса.
10. Устройство измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке по п.9, отличающееся тем, что каждое бесконтактное измерительное устройство состоит из светового излучателя, оптической камеры, передающей цифровой код, и датчика углового положения.
11. Устройство измерения геометрических параметров мест установки плоскостей коррекции и последующего указания мест установки грузов при динамической балансировке по п.10, отличающееся тем, что световой излучатель выполнен как лазерный излучатель.
| US 6244108 B1, 12.06.2001 | |||
| СПОСОБ ИЗМЕРЕНИЯ ДИАМЕТРА И «ВЫЛЕТА» ДИСКА АВТОМОБИЛЬНОГО КОЛЕСА НА БАЛАНСИРОВОЧНОМ СТАНКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2365887C1 |
| US 5447064 A, 05.09.1995 | |||
| US 7199873 B2, 03.04.2007 | |||
| Стереометрический способ определения координат поверхности объекта | 1981 |
|
SU979854A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Руководство по эксплуатации | |||
| МЕТАЛЛИЧЕСКАЯ ШАРНИРНАЯ СЕТКА | 1922 |
|
SU603A1 |

