Изобретение относится к лесозаготовительным машинам, а именно к манипуляторам.
Известен манипулятор, содержащий стрелу, сочлененную посредством шарнирного соединения с поворотной колонной, установленной на базовой машине, рукоять, сочлененную посредством шарнирного соединения со стрелой, рабочий орган, прикрепленный к рукояти посредством шарнирного соединения, и систему управления, включающую гидроцилиндры привода стрелы, гидроцилиндр привода рукояти и гидроцилиндр привода рабочего органа (см. Машины и оборудование лесозаготовок [Текст]: справочник / Е.И.Миронов, Д.Б.Рохленко, Л.Н.Беловзоров и др. - М.: Лесн. пром-сть, 1985. - С.43).
Недостатками данного манипулятора являются: малый вылет и низкая устойчивость базовой машины.
Наиболее близким к предлагаемому по технической сущности является манипулятор, содержащий стрелу, сочлененную посредством шарнирного соединения с поворотной платформой базовой машины, рукоять, сочлененную посредством шарнирного соединения со стрелой, рабочий орган, прикрепленный к рукояти посредством шарнирного соединения, и систему управления, включающую гидроцилиндры привода стрелы, гидроцилиндр привода рукояти и гидроцилиндр привода рабочего органа (см. а.с. СССР №1255424, М. кл. B25J 5/00, 07.09.1986. Бюл. №33).
Недостатками данного манипулятора являются: малый вылет и низкая устойчивость базовой машины.
Задача, на решение которой направлено изобретение - увеличение вылета манипулятора для лесозаготовительных работ и повышение устойчивости базовой машины.
Для достижения технического результата в манипуляторе, соединенном посредством шарнирного соединения с поворотной частью базовой машины, содержащем стрелу, рукоять, сочлененную посредством шарнирного соединения со стрелой, рабочий орган, прикрепленный к рукояти посредством шарнирного соединения, и систему управления, включающую гидроцилиндры привода стрелы, гидроцилиндр привода рукояти и гидроцилиндр привода рабочего органа, согласно изобретению, гидроцилиндры привода стрелы установлены на балке, причем один конец балки соединен посредством шарнирного соединения с поворотной частью базовой машины, а другой - опирается на управляемое приводом колесо.
Присутствие в конструкции манипулятора балки, одним концом соединенной посредством шарнирного соединения с поворотной частью базовой машины, а другим - опирающейся на колесо, снижает опрокидывающий момент манипулятора и увеличивает удерживающий момент базовой машины, так как опрокидывание при работе манипулятора может произойти только относительно точки контакта колеса балки с опорной поверхностью (грунтом), а вылет балки по направлению вылета манипулятора сокращает плечо опрокидывающих сил. Вылет балки больше, чем расстояние от центра тяжести базовой машины до крайних точек ее ходовой части, а следовательно, плечо удерживающей силы будет больше. В результате можно увеличить вылет манипулятора или уменьшить габариты и массу базовой машины. Установка гидроцилиндров привода стрелы на данной балке обеспечивает свободное вращение манипулятора в вертикальной плоскости относительно поворотной части базовой машины под действием гравитационных сил и наоборот. Это обеспечивает возможность работы машины в условиях пересеченного рельефа местности и при наличии препятствий, например пней. Указанному вращению препятствует реактивная сила, возникающая в зоне контакта колеса с опорной поверхностью (грунтом). При перегрузке манипулятора в результате возможности свободного вращения в вертикальной плоскости происходит отрыв от опорной поверхности движителя базовой машины, расположенного со стороны вылета манипулятора, а движитель, расположенный с противоположной стороны, упирается в грунт, что препятствует опрокидыванию машины, после снятия опрокидывающего момента с манипулятора базовая машина возвращается в исходное положение. Таким образом, повышается устойчивость базовой машины. Управление колесом, на которое опирается балка, обеспечивает изменение его положения относительно манипулятора, что снижает сопротивления вращению манипулятора в горизонтальной плоскости и перемещению базовой машины.
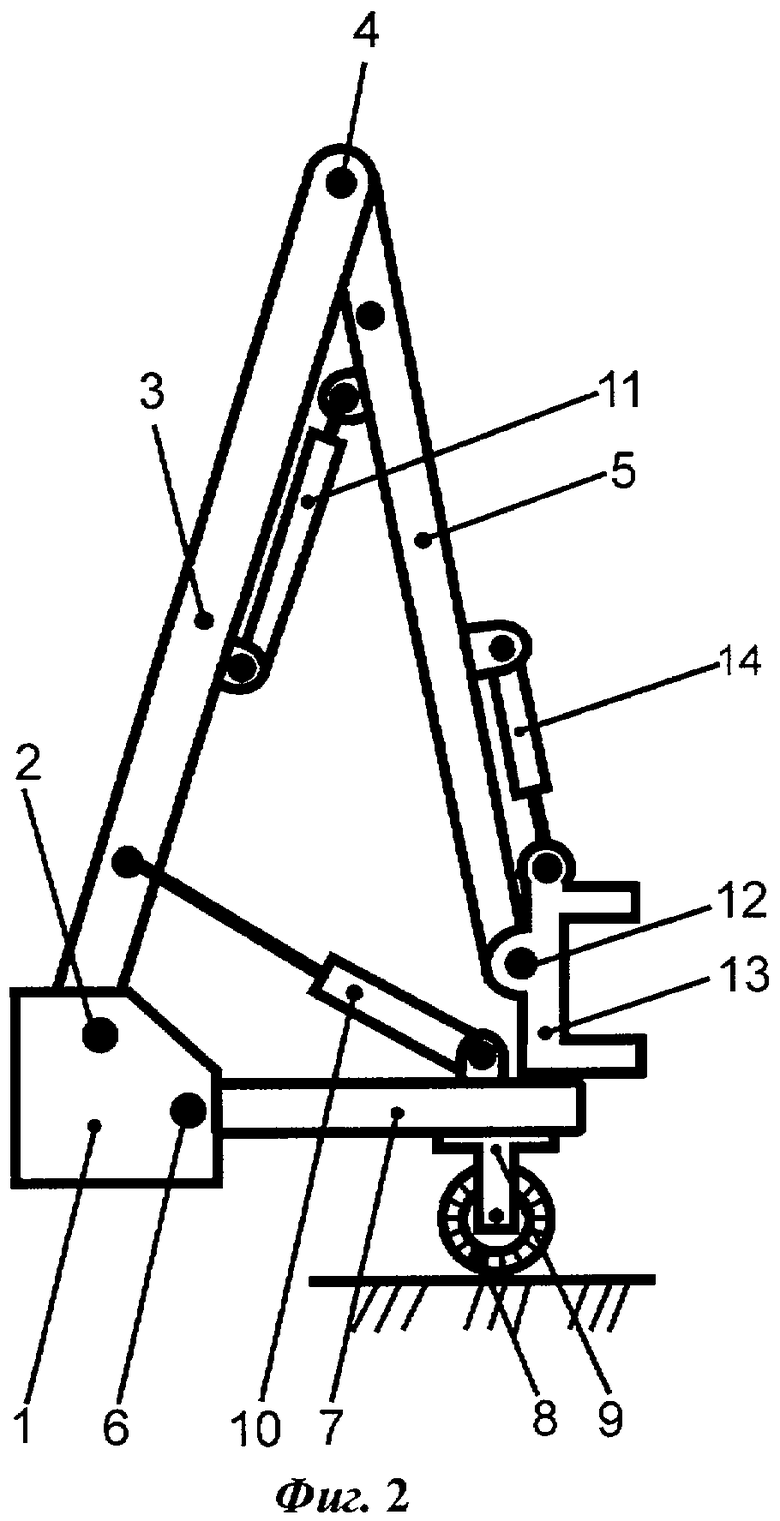
На фиг.1 изображен манипулятор в рабочем положении, вид сбоку; на фиг.2 - манипулятор в транспортном положении, вид сбоку.
Манипулятор состоит из кронштейна 1, установленного на поворотной части (платформе или колонне) базовой машины (на чертеже не показана), на котором посредством шарнирного соединения 2 закреплена стрела 3, сочлененная посредством шарнирного соединения 4 с рукоятью 5. К кронштейну 1 посредством шарнирного соединения 6 прикреплена балка 7, опирающаяся вторым концом на управляемое колесо 8, которое упирается в грунт или дорожное покрытие. Управляемое колесо вращается относительно вертикальной оси при помощи привода 9. Подъем и опускание стрелы 3 осуществляют гидроцилиндры 10, установленные на балке 7. Вращение рукояти 5 относительно шарнира 4 обеспечивается гидроцилиндром 11, установленным на стреле 3. На рукояти 5 посредством шарнирного соединения 12 закреплен рабочий орган (захватно-срезающее устройство, харвестерная головка, грейфер) 13, управляемый гидроцилиндром 14, установленным на рукояти 5.
В транспортном положении стрела 3 поднята гидроцилиндрами 10, а рукоять 5 прижата к стреле 3 гидроцилиндром 11, при этом рабочий орган 13 установлен на краю балки 7. При установке кронштейна 1 на поворотной платформе балка 7 с опирающимися на нее гидроцилиндрами 10, рабочим органом 13 посредством колеса 8, установленного вдоль балки 7, движется впереди машины. Направление движения обеспечивается поворотами колеса 8 при помощи привода 9. При установке кронштейна 1 на поворотной колонне балка 7 с опирающимися на нее гидроцилиндрами 10, рабочим органом 13 посредством колеса 8 движется сзади машины. Расположение рабочего органа 13 на краю балки 7 обеспечивает устойчивость машины.
При работе манипулятора на технологической стоянке колесо 8 при помощи привода 9 устанавливается перпендикулярно балке 7. Движения манипулятора вверх-вниз, вперед-назад обеспечиваются подъемом и опусканием стрелы 3 гидроцилиндрами 10 и вращением рукояти относительно шарнира 4, осуществляемого ходом штока гидроцилиндра 11. Рабочий орган 13 вращается относительно шарнира 12 гидроцилиндром 14. Движения манипулятора вокруг базового шасси осуществляются в результате вращения поворотной части (платформы или колонны), на которой установлен кронштейн 1 с закрепленными на нем посредством шарнирных соединений 2 и 6 стрелой 3 и балкой 7. При этом колесо 8 движется по направлению вращения поворотной платформы или поворотной колонки и управляется приводом 9 для снижения сопротивлений повороту манипулятора. За счет возможности вращения манипулятора в вертикальной плоскости относительно шарнирных соединений 2 и 6 колесо 8 может наезжать на различные препятствия и неровности. При работе манипулятора возникают реактивные усилия на колесе 8 (направлено вверх) и в шарнирах 2 и 6 (направлены вниз). При этом на базовую машину действуют силы, приложенные в шарнирах 2 и 6 и направленные вверх. Таким образом, опрокидывающие моменты базовой машины и манипулятора направлены в противоположные стороны, и машина обладает повышенной устойчивостью.
Длина балки 7 устанавливается из условия возможности свободного перемещения колеса 8 при вращении манипулятора вокруг базового шасси. Нетрудно заметить, что чем длиннее балка 7, тем машина более устойчивая, но длинная балка должна иметь большее поперечное сечение, так как в ней будут возникать значительные изгибающие моменты, также увеличение длины балки усложняет управление манипулятором и увеличивает габарит машины по длине в транспортном положении. Таким образом, длину балки 7 следует обосновывать расчетом при заданных параметрах манипулятора и базовой машины по критерию устойчивости, которая будет обеспечена, если равнодействующая реакций в шарнирах 2 и 6 при полной нагрузке на манипулятор не будет больше силы тяжести базовой машины.
Применение манипулятора предложенной конструкции позволяет увеличить ширину рабочей зоны машины за счет увеличенного вылета или уменьшить габариты и массу базовой машины, а также обеспечивает повышенную устойчивость машины и позволяет использовать ее при пересеченном рельефе местности, а следовательно, способствует снижению площади повреждения лесных земель, сохранению подроста и энергосбережению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор лесохозяйственной машины | 2022 |
|
RU2780834C1 |
| Манипулятор лесозаготовительной машины | 1979 |
|
SU791517A1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1992 |
|
RU2044465C1 |
| Лесозаготовительная машина | 1981 |
|
SU973077A1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 1998 |
|
RU2141755C1 |
| Манипулятор | 1978 |
|
SU815279A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1999 |
|
RU2163434C1 |
| Ограничитель грузоподъемности погруз-чиКА-МАНипуляТОРА | 1979 |
|
SU798024A2 |
| Машина лесозаготовительная | 2017 |
|
RU2671802C1 |
Изобретение относится к лесозаготовительным машинам, а именно к манипуляторам. Манипулятор соединен посредством шарнирного соединения с поворотной частью базовой машины и содержит стрелу, рукоять, сочлененную посредством шарнирного соединения со стрелой, рабочий орган, прикрепленный к рукояти посредством шарнирного соединения, и систему управления. Система управления включает гидроцилиндры привода стрелы, гидроцилиндр привода рукояти и гидроцилиндр привода рабочего органа. Гидроцилиндры привода стрелы установлены на балке. При этом один конец балки соединен посредством шарнирного соединения с поворотной частью базовой машины, а другой - опирается на управляемое приводом колесо. Изобретение направлено на увеличение вылета манипулятора и повышение устойчивости базовой машины. 2 ил.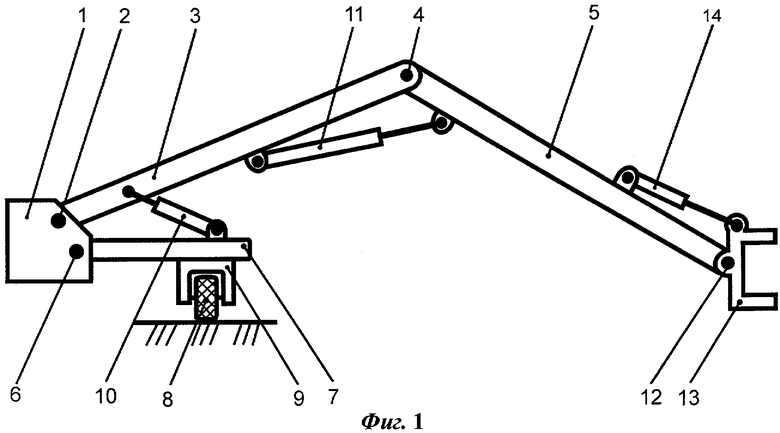
Манипулятор для лесозаготовительных работ, соединенный посредством шарнирного соединения с поворотной частью базовой машины, содержащий стрелу, рукоять, сочлененную посредством шарнирного соединения со стрелой, рабочий орган, прикрепленный к рукояти посредством шарнирного соединения, и систему управления, включающую гидроцилиндры привода стрелы, гидроцилиндр привода рукояти и гидроцилиндр привода рабочего органа, отличающийся тем, что гидроцилиндры привода стрелы установлены на балке, причем один конец балки соединен посредством шарнирного соединения с поворотной частью базовой машины, а другой опирается на управляемое приводом колесо.
| Манипулятор | 1984 |
|
SU1255424A1 |
| МАНИПУЛЯТОР | 2008 |
|
RU2363148C1 |
| Манипулятор лесозаготовительнойМАшиНы | 1978 |
|
SU808054A1 |
| Манипулятор | 1974 |
|
SU540607A1 |
| SE 406413 B, 12.02.1979. | |||

