Изобретение относится к электротехнике и может быть использовано для определения потокосцепления статора асинхронных машин в процессе их работы.
Известен способ определения потокосцепления статора асинхронного двигателя (АД) (А.с. СССР 1468211, МПК G01R 31/34. Опубл. 26.01.87. Бюл. №9), реализуемый в процессе работы АД под нагрузкой, и требующий подключения измерительной системы только к статорной цепи АД.
Его недостатком является значительная погрешность, вызванная интегрированием, которое, при наличии постоянных составляющих погрешностей в сигналах с датчиков тока и напряжения, приводит к постоянно возрастающему во времени смещению рассчитанного потокосцепления.
Также известен способ определения потокосцепления статора АД (Hinkkanen M., Luomi J. Modified Integrator for voltage model flux estimation of induction motors // IEEE Trans. on Industrial Electronics. - 2003. - V.50, No. 4. - p.818-820.), в котором, для устранения влияния постоянных составляющих, используется фильтр низких частот первого порядка.
Недостатком данного способа является то, что определение потокосцепления статора происходит с погрешностью, вызванной заменой интегратора на фильтр низких частот.
Наиболее близким техническим решением того же назначения к заявляемому по совокупности признаков является способ определения потокосцепления статора (Душинова Е.В., Левикина В.И., Васильева Е.В. Простой метод оценки потокосцепления асинхронного двигателя. Радиоэлектроника. Информатика. Управление. №1. 2008. с.143-148), согласно которому измеряют мгновенные значения напряжений и токов статорной цепи, преобразуют их в систему координат alpha, beta, вычисляют значения потокосцепления с помощью фильтра низких частот первого порядка с характеристиками, рассчитанными для уменьшения погрешности вычисления.
К его недостаткам также относится наличие погрешности определения потокосцепления двигателя, вносимой фильтром низких частот.
Задачей предлагаемого изобретения является повышение точности определения потокосцепления статора асинхронных машин.
Технический результат заявляемого изобретения выражается в повышении точности определения потокосцепления статора АД за счет применения искусственной нейронной сети для корректировки погрешности вычисления потокосцепления статора.
Указанный технический результат достигается тем, что в способе определения потокосцепления статора АД, включающем измерение мгновенных значений напряжений и токов статорной цепи, преобразование в систему координат alpha, beta, вычисление значения потокосцепления с помощью фильтра низких частот первого порядка с характеристиками, рассчитанными для уменьшения погрешности вычисления, согласно изобретению для уточнения вычисленного значения потокосцепления используют искусственную нейронную сеть, на вход которой подают значение потокосцепления, предварительно вычисленное с помощью фильтра низких частот, а также значения фазных токов в момент измерения, значения фазных токов с задержкой по времени на один шаг измерения и на два шага измерения, а затем с выхода искусственной нейронной сети получают уточненное значение потокосцепления.
Дополнение расчетной схемы искусственной нейронной сетью позволяет уточнить рассчитанное с помощью фильтра низких частот значение потокосцепления за счет аппроксимации зависимости истинного значения потокосцепления от потокосцепления, рассчитанного с помощью фильтра низких частот и значений фазных токов в момент измерения, значений фазных токов с задержкой по времени на один шаг измерения и на два шага измерения, уменьшив тем самым погрешность, вносимую фильтром низких частот.
Заявляемое изобретение поясняется чертежом, где показана структурная схема способа определения потокосцепления статора асинхронного двигателя.
Предлагаемый способ осуществляют следующим образом: сначала подают измеренные мгновенные значения токов и напряжений статорной цепи фаз А, В, С на координатный преобразователь 1, где вычисляют значения токов и напряжений в осях alpha и beta. Затем значения токов умножают на значение активного сопротивления статора в блоках умножения 2, и полученные произведения вычитают из напряжений в блоках вычитания 3, а разности с выходов блоков 3 подают на интегрирующие формирователи потокосцеплений 4. После этого рассчитанные значения потокосцепления вместе с мгновенными значениями токов, а также токов с задержкой по времени на один и два шага измерения с выходов блоков задержки 5, подают на вход искусственной нейронной сети 6, с выхода которой получают уточненное значение потокосцепления в осях alpha и beta.
Пример конкретного применения способа: для асинхронных двигателей 4AMX90L2Y3, 4АМ80А4СУ1, АИРМ9012У3 измеряют напряжения и токи статора АД, например, с помощью датчиков тока LA-100P и датчиков напряжения на основе резистивных делителей и преобразуют в цифровую форму, например, с помощью модуля АЦП ЛА-1,5PCI с разрядностью 12 бит. Затем преобразуют измеренные значения в систему координат alpha, beta, вычисляют значения потокосцепления с помощью фильтра низких частот первого порядка, реализовав блоки 1, 2, 3, 4 программно на промышленном компьютере или цифровом сигнальном процессоре. После чего подают вычисленные значения потокосцепления, фазных токов и фазных токов с задержкой по времени на искусственную нейронную сеть, реализованную либо программно на том же компьютере, либо в виде отдельного вычислительного устройства, а с выхода искусственной нейронной сети получают уточненное значение потокосцепления. В проведенных по данной схеме вычислительных экспериментах погрешность определения потокосцепления статора уменьшается с 5-6% до 2-3% по сравнению с расчетами без применения искусственной нейронной сети, а в проведенных практических экспериментах погрешность определения вращающего момента, рассчитываемого на основе потокосцепления статора, также уменьшилась с 5-6% до 2-3% при применении искусственной нейронной сети для уточнения значения потокосцепления.
Таким образом, заявляемый способ позволяет повысить точность определения потокосцепления статора АД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДА ЖИДКОСТИ ЦЕНТРОБЕЖНОГО НАСОСА С АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2020 |
|
RU2741267C1 |
| Способ определения расхода жидкости центробежного насоса с асинхронным электроприводом | 2021 |
|
RU2781571C1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАВЛЕНИЯ ЦЕНТРОБЕЖНОГО НАСОСА С АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2020 |
|
RU2743866C1 |
| Способ определения давления центробежного насоса с асинхронным электроприводом | 2021 |
|
RU2791970C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2016 |
|
RU2621880C1 |
| Способ определения давления центробежного насоса с асинхронным электроприводом | 2022 |
|
RU2791689C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
Изобретение относится к области электротехники, а именно к способам определения параметров асинхронных двигателей. С помощью датчиков тока и напряжения сначала измеряют мгновенные значения напряжений и токов в питающей сети, затем их подают в координатные преобразователи, преобразующие напряжение и токи из координатной системы А, В, С в систему alpha, beta, вычисляют предварительное значение потокосцепления с помощью фильтра низких частот первого порядка, а затем вычисляют уточненное значение потокосцепления с помощью искусственной нейронной сети на основе предварительного значения потокосцепления и значений измеренного тока. Технический результат заключается в повышении точности определения потокосцепления статора асинхронных двигателей. 1 ил.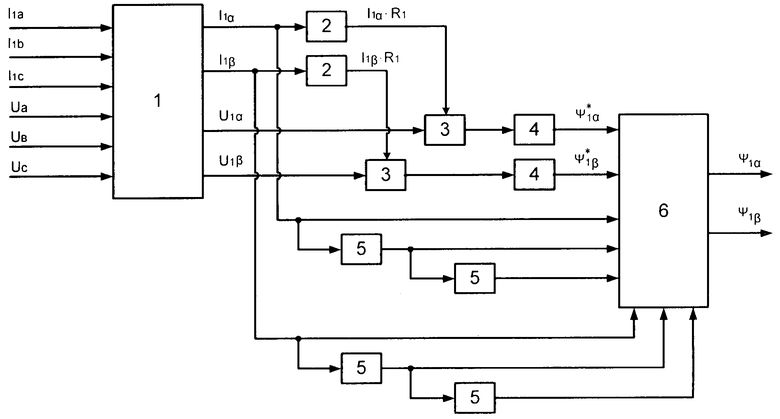
Способ определения потокосцепления статора асинхронного двигателя, включающий измерение мгновенных значений напряжений и токов статорной цепи, преобразование в систему координат alpha, beta, вычисление значения потокосцепления с помощью фильтра низких частот первого порядка с характеристиками, рассчитанными для уменьшения погрешности вычисления, отличающийся тем, что для уточнения вычисленного значения потокосцепления применяют искусственную нейронную сеть, на вход которой подают значение потокосцепления, предварительно вычисленное с помощью апериодического звена, а также значения фазных токов в момент измерения, значения фазных токов с задержкой по времени на один шаг измерения и на два шага измерения, а затем с выхода искусственной нейронной сети получают уточненное значение потокосцепления.
| Душинова Е.В., Левикина В.И., Васильева Е.В | |||
| Простой метод оценки потокосцепления асинхронного двигателя | |||
| Радиоэлектроника | |||
| Информатика | |||
| Управление | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения потокосцепления асинхронной машины | 1988 |
|
SU1589224A1 |
| Устройство для вычисления вектора главного потокосцепления асинхронной машины с короткозамкнутым ротором | 1989 |
|
SU1686685A1 |
| JP 2003038000, 07.02.2003. | |||

