Изобретение относится к области электротехники и может быть использовано для определения частоты вращения ротора асинхронных двигателей в системах диагностирования электродвигателей и связанных с ними механических устройств, в частности, размещенных в труднодоступных местах.
Известен способ определения оценки частоты вращения ротора асинхронного двигателя (патент РФ на изобретение №2476983), в котором измеряют мгновенные величины токов и напряжений статора асинхронного двигателя, одновременно проводят измерение мгновенных величин токов и напряжений на двух фазах статора, последовательно выполняют три временные задержки, по крайней мере, на 6 мс, получая текущие и задержанные единожды, дважды и трижды значения токов и напряжений двух фаз статора двигателя, с помощью предварительно обученной искусственной нейронной сети, по опытным данным работы электродвигателя во всех режимах, используя выявленные искусственной нейронной сетью при обучении зависимости между входными и выходными данными, определяют мгновенную величину оценки частоты вращения ротора асинхронного двигателя по определенным формулам.
Недостатком способа является необходимость предварительного обучения нейронной сети по опытным данным работы электродвигателя во всех режимах, что является трудоемкой задачей. Кроме того, присутствует аппаратная избыточность - необходимо наличие датчика напряжения.
Известен способ диагностики электродвигателей переменного тока и связанных с ним механических устройств (патент РФ на изобретение №2300116), при котором в течение заданного интервала времени производят запись значений фазного тока, потребляемого электродвигателем, с помощью датчика тока с линейной амплитудно-частотной характеристикой, выделяют анализируемые характерные частоты с помощью фильтра низких частот, преобразуют полученный сигнал из аналоговой в цифровую форму, а затем производят спектральный анализ полученного сигнала.
Недостатком технического решения является необходимость дополнительного определения скорости вращения ротора двигателя с помощью отдельного датчика.
Наиболее близким к предложенному решению является метод определения скорости и угла поворота электрических машин с помощью использования пазовых частот, либо высших гармоник пазовых частот (патент ЕС на изобретение ЕР 2556381 В1), в котором получают сигнал напряжения со специальной внешней измерительной катушки, либо сигнал напряжения для управляемых током двигателей, либо сигнал тока для управляемых напряжением двигателей, проводят демодуляцию полученного сигнала путем умножения на сгенерированный синусоидальный сигнал с основной частотой сети питания, фильтруют полученный результат полосовым фильтром с изменяющейся центральной частотой, которая зависит от предыдущих результатов измерений, выделяя, таким образом, пазовые гармоники. По изменению амплитуды пазовых гармоник во времени судят об угле поворота ротора и, как следствие, о его угловой скорости.
Недостатком такого метода является использование полосового фильтра с изменяющейся центральной частотой, что требует пересчета параметров фильтра каждый раз перед оцифровкой данных. Также необходимо умножение оцифрованного сигнала на синусоидальный сигнал с частотой питающей сети, что существенно нагружает устройство, на котором выполняются вычисления.
Целью предлагаемого способа является повышение уровня автоматизации и снижение трудоемкости процесса определения частоты вращения ротора асинхронных двигателей.
Поставленная цель достигается тем, что в устройство для определения частоты вращения ротора асинхронных двигателей, содержащее датчики напряжения и тока, формирующие сигналы, пропорциональные соответственно току и напряжению одной фазы статора асинхронного двигателя, подключенные последовательно соответственно к первому и второму фильтрам нижних частот, первому и второму аналого-цифровым преобразователям, первому и второму анализаторам спектра, первому и второму входам вычислителя скорости вращения ротора; вычислитель частот канонических гармоник, входом и выходом подключенный соответственно к выходу первого анализатора спектра и третьему входу вычислителя скорости вращения ротора, выходом связанного со входом индикатора, дополнительно введен определитель потребляемой мощности, входами подключенный к выходам первого и второго аналого-цифровых преобразователей, а выходом связанный с четвертым входом вычислителя скорости вращения ротора, а также задатчик типа двигателя, через базу параметров двигателей подключенный к пятому входу вычислителя скорости вращения ротора.
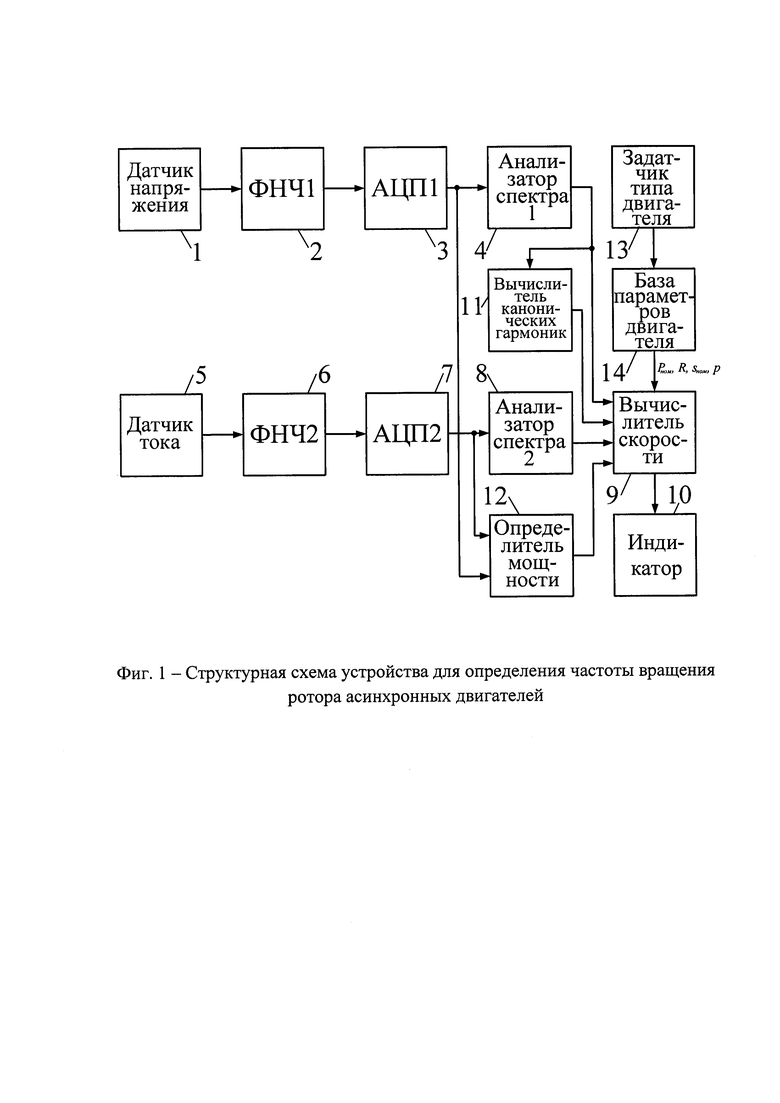
На фиг. 1 представлена структурная схема предлагаемого устройства. Датчик напряжения 1 и датчик тока 5 подключены к одной фазе статора асинхронного двигателя. Первый и второй фильтры нижних частот 2, 6 (ФНЧ1 и ФНЧ2) выполняют функции антиалайсинговых фильтров, отсекая мешающие высшие гармоники в сигналах, пропорциональных току и напряжению одной фазы статора. Первый и второй аналого-цифровые преобразователи 3, 7 (АЦП1 и АЦП2) преобразуют аналоговые сигналы в цифровую форму.
Первый и второй анализаторы спектра 4, 8, используя преобразование Фурье, вычисляют спектральную характеристику сигналов тока и напряжения и передают эту информацию в вычислитель скорости вращения ротора 9. Рассчитанная величина скорости вращения ротора двигателя отображается в индикаторе 10. Вычислитель канонических гармоник 11 определяет частоту основной гармоники сигнала напряжения и передает эту информацию в вычислитель скорости 9.
Определитель мощности 12 вычисляет потребляемую мощность двигателя с подсоединенной к нему нагрузкой. С помощью задатчика типа двигателя 13 вручную вводится тип двигателя, в базе параметров двигателя 14 происходит поиск всех необходимых для дальнейших расчетов параметров тестируемого типа двигателя, предварительно записанных в эту базу.
Устройство работает следующим образом. Датчики напряжения и тока 1, 5 формируют сигналы, пропорциональные соответственно току и напряжению одной фазы статора асинхронного двигателя. Первый и второй фильтры нижних частот 2, 6 (ФНЧ1 и ФНЧ2) выполняют функции антиалайсинговых фильтров, отсекая мешающие высшие гармоники в сигналах, пропорциональных току и напряжению одной фазы статора. Последовательность оцифрованных данных с выходов первого и второго аналого-цифровых преобразователей 3, 7, анализаторы спектра 4, 8, дающие на выходе спектры сигналов напряжения  тока
тока  . Вычислитель канонических гармоник 11 выделяет главную гармонику напряжения
. Вычислитель канонических гармоник 11 выделяет главную гармонику напряжения  . Блок 13 задает тип двигателя для базы параметров двигателя 14, которая хранит конструктивные параметры двигателя - номинальный момент Мном, число стержней ротора R, величину номинального скольжения Sном, число пар полюсов р. При отсутствии в базе данных введенного типа двигателя он вносится через блок 13. Блок 12 рассчитывает потребляемую двигателем электрическую мощность. Вычисленное значение мощности используется для выбора коридора поиска пазовых гармоник в блоке 9.
. Блок 13 задает тип двигателя для базы параметров двигателя 14, которая хранит конструктивные параметры двигателя - номинальный момент Мном, число стержней ротора R, величину номинального скольжения Sном, число пар полюсов р. При отсутствии в базе данных введенного типа двигателя он вносится через блок 13. Блок 12 рассчитывает потребляемую двигателем электрическую мощность. Вычисленное значение мощности используется для выбора коридора поиска пазовых гармоник в блоке 9.
Коридоры поиска частот пазовых гармоник в спектре тока статора вычисляются в блоке 9 следующим образом.
Грубо вычисляется скольжение двигателя через потребляемую мощность. Аппроксимируем механическую характеристику асинхронного двигателя:
 .
.
Механический момент также равен:
 ,
,
где Р2=Pl-ΣРпот - механическая мощность, Р1 - измеренная электромагнитная мощность, Рпот - мощность потерь.
Приравниваем уравнения моментов:
 .
.
Подставим  :
:
 .
.
Решив квадратное уравнение, получаем:
 .
.
Примем во внимание, что аппроксимация проводилась прямой линией, а так же то, что точно неизвестна полная мощность потерь, тогда вычисленное скольжение будет обладать некоторой относительной погрешностью εs, которая подбирается экспериментально.
Коридоры поиска пазовых гармоник для нижней спектральной компоненты:
 ,
,
 ,
,
для верхней спектральной компоненты:
 ,
,
 ,
,
Блок 9 определяет в вычисленном диапазоне пики спектральной характеристики, соответствующие нижней и верхней частоте пазовых гармоник  и
и  , с наибольшей амплитудой, которые присутствуют в спектре тока статора, но отсутствуют в спектре напряжения статора, расположенные на частоте
, с наибольшей амплитудой, которые присутствуют в спектре тока статора, но отсутствуют в спектре напряжения статора, расположенные на частоте  друг от друга.
друг от друга.
Найденные частоты пазовых гармоник и используются для расчета частоты вращения ротора асинхронного двигателя по формуле:
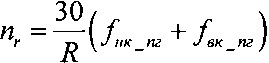
Вычисленное значение частоты вращения ротора подается на индикатор 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения частоты вращения ротора асинхронных двигателей | 2020 |
|
RU2731322C1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2019 |
|
RU2711647C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИЗОЛЯЦИИ ОБМОТОК СТАТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2537744C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПО ТОКУ СТАТОРА | 2014 |
|
RU2559162C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕХАНИЧЕСКИХ ПОВРЕЖДЕНИЙ ТРЕХФАЗНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2007 |
|
RU2356061C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2624986C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОЧВЫ | 2013 |
|
RU2535102C1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2007 |
|
RU2339049C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
Изобретение относится к области электротехники и может быть использовано для определения частоты вращения ротора асинхронных двигателей в системах диагностирования электродвигателей и связанных с ними механических устройств, в частности, размещенных в труднодоступных местах. Датчики напряжения и тока формируют сигналы, пропорциональные соответственно току и напряжению одной фазы ротора асинхронного двигателя. Первый и второй фильтры нижних частот выполняют функции антиалайсинговых фильтров, отсекая мешающие высшие гармоники в сигналах, пропорциональных току и напряжению одной фазы статора. Последовательность оцифрованных данных с выходов первого и второго аналого-цифровых преобразователей поступает на вход анализаторов спектра, дающих на выходе спектры сигналов напряжения и тока. Вычислитель канонических гармоник выделяет главную и канонические гармоники напряжения. Задатчик типа двигателя задает тип двигателя для базы параметров двигателя, которая хранит конструктивные параметры двигателя - номинальную мощность Рном, число стержней ротора R, величину номинального скольжения sном, число пар полюсов р. При отсутствии в базе данных введенного типа двигателя он вносится вручную. Определитель мощности рассчитывает величину потребляемой двигателем электрической мощности, которая используется для выбора коридора поиска пазовых гармоник и определения скорости вращения ротора в вычислителе скорости. Дополнительно введен определитель потребляемой мощности, задатчик типа двигателя и база параметров двигателей, содержащая данные о конструктивных параметрах двигателя, что сокращает трудоемкость процесса определения частоты. Технический результат заключается в повышении уровня автоматизации. 1 ил.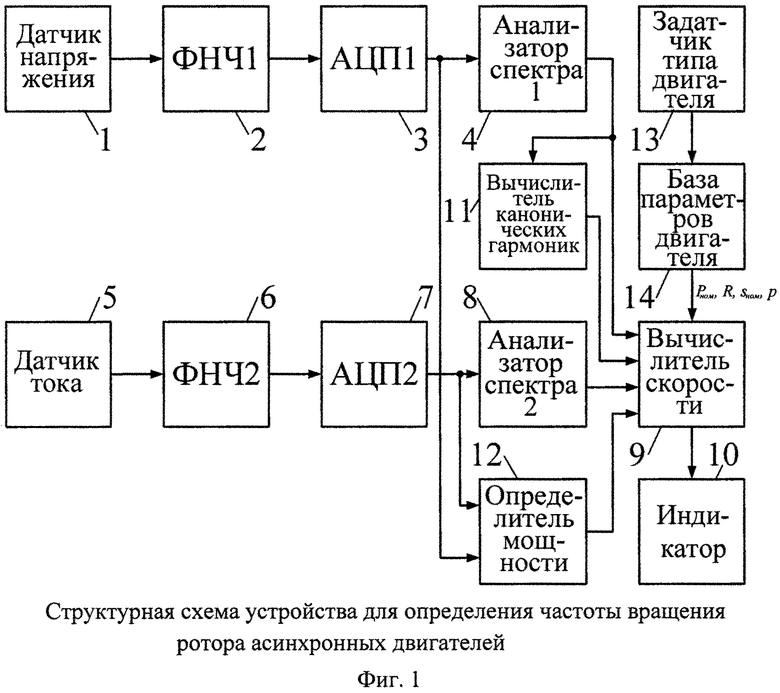
Устройство для определения частоты вращения ротора асинхронных двигателей, содержащее датчики напряжения и тока, формирующие сигналы, пропорциональные соответственно напряжению и току одной фазы статора асинхронного двигателя, подключенные последовательно соответственно к первому и второму фильтрам нижних частот, первому и второму аналого-цифровым преобразователям, первому и второму анализаторам спектра, первому и второму входам вычислителя скорости вращения ротора; вычислитель частот канонических гармоник, входом и выходом подключенный соответственно к выходу первого анализатора спектра и третьему входу вычислителя скорости вращения ротора, выходом связанного со входом индикатора, отличающееся тем, что дополнительно введен определитель мощности, входами подключенный к выходам первого и второго аналого-цифровых преобразователей, а выходом связанный с четвертым входом вычислителя скорости вращения ротора, а также задатчик типа двигателя, через базу параметров двигателей подключенный к пятому входу вычислителя скорости вращения ротора.
| US 5448150 A, 05.09.1995 | |||
| US 4499413 A, 12.02.1985 | |||
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМИ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2005 |
|
RU2300116C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2476983C1 |

