Изобретение относится к транспортной технике, в частности к тяговому приводу электровозов.
На большинстве электровозов тяговое усилие создается более чем одной колесной парой, при этом ведущие колесные пары имеют привод от индивидуальных тяговых двигателей. При конструировании экипажной части электровоза стремятся к равномерному распределению сцепной массы по ведущим осям, при этом максимальному тяговому усилию, а следовательно, и максимальному использованию сцепной массы соответствует равномерное распределение общего тягового усилия по ведущим осям. В то же время на практике часто имеет место разность диаметров ведущих колес на различных колесных парах (например, ввиду различного их износа), а также различие механических характеристик тяговых двигателей ввиду разброса их параметров. Данные обстоятельства приводят к тому, что колесные пары развивают различные тяговые усилия. Проблема особенно характерна для двигателей с жесткой механической характеристикой (асинхронных, постоянного тока независимого возбуждения), которые находят все более широкое применение на транспортных средствах. С такими двигателями различие тяговых усилий отдельных колесных пар может быть сравнимо с самой величиной тягового усилия колесной пары, возможен даже переход отдельных двигателей в генераторный режим. Наличие указанной проблемы вынуждает искать способы устранения разности тяговых усилий колесных пар.
При работе в составе транспортного средства линейные скорости осей колесных пар одинаковы, и для получения одинакового тягового усилия требуется, чтобы на механической характеристике каждой колесной пары, приведенной к линейному движению, текущему значению скорости соответствовало одно и то же значение тягового усилия.
В случае неравенства диаметров колесных пар или (и) неидентичности характеристик двигателей механические характеристики, приведенные к линейному движению, будут отличаться. В общем случае имеет место различие как жесткостей характеристик, так и линейных скоростей в режиме идеального холостого хода.
Для выравнивания нагрузок (устранения разности тяговых усилий) колесных пар предложены различные способы. Так, известно предложение корректировать жесткости механических характеристик асинхронных тяговых двигателей путем регулирования питающих напряжений при неизменной частоте (смотри, например: Конашинский А.Ю. Система группового энергоснабжения асинхронных тяговых двигателей, патент RU 2166441, МПК B60L 9/22). Подобный способ устраняет неравномерность нагрузок, вызванную расхождением только жесткостей механических характеристик тяговых двигателей. В случае неравенства скоростей в режиме идеального холостого хода равенство тяговых усилий может быть обеспечено лишь при одном определенном значении суммарного тягового усилия. Учитывая что при эксплуатации наблюдается постоянное изменение суммарного тягового усилия (например, в связи с изменением уклона рельсового пути), данный способ требует постоянной автоматической коррекции жесткостей механических характеристик таким образом, чтобы равенство тяговых усилий обеспечивалось при текущем значении суммарного тягового усилия.
Выравнивание тяговых усилий возможно также путем корректирования частот вращения идеального холостого хода тяговых двигателей, например, при питании асинхронных тяговых двигателей от индивидуальных инверторов с управляемой частотой. Данный способ, как и предыдущий, в общем случае позволяет добиться равенства тяговых усилий колесных пар лишь при одном значении суммарного тягового усилия.
Таким образом, известные способы позволяют добиться равномерного распределения тяговых усилий при переменной нагрузке на транспортное средство, в общем случае, лишь при условии постоянного автоматического изменения корректирующих воздействий. Однако применение автоматического регулирования встречает трудности, связанные с обеспечением достаточного быстродействия в динамических режимах работы тяговых приводов и, одновременно, с отстройкой от помех, вызванных, например, срывом сцепления ведущих колес.
Задача изобретения - обеспечить выравнивание нагрузок тяговых двигателей в условиях изменяющейся нагрузки транспортного средства без необходимости подстройки корректирующего воздействия для каждого значения суммарного тягового усилия, имея в виду, что факторы, вызывающие различия тяговых характеристик колесных пар (износ ведущих колес, температурные вариации параметров двигателей), изменяются во времени существенно медленнее, чем происходят динамические процессы в приводе. В результате отсутствует требование высокого быстродействия корректирующих устройств и значительно упрощается отстройка от помех, вызванных динамическими процессами в приводе.
Для решения поставленной задачи предлагается добиться совпадения механических характеристик тяговых двигателей, приведенных к линейному перемещению, которое обеспечит равенство тяговых усилий при любом значении суммарного тягового усилия. При этом для идентификации причины, вызвавшей расхождение тяговых усилий, можно использовать режим работы привода, близкий к холостому ходу, в котором минимально влияние различий жесткостей механических характеристик.
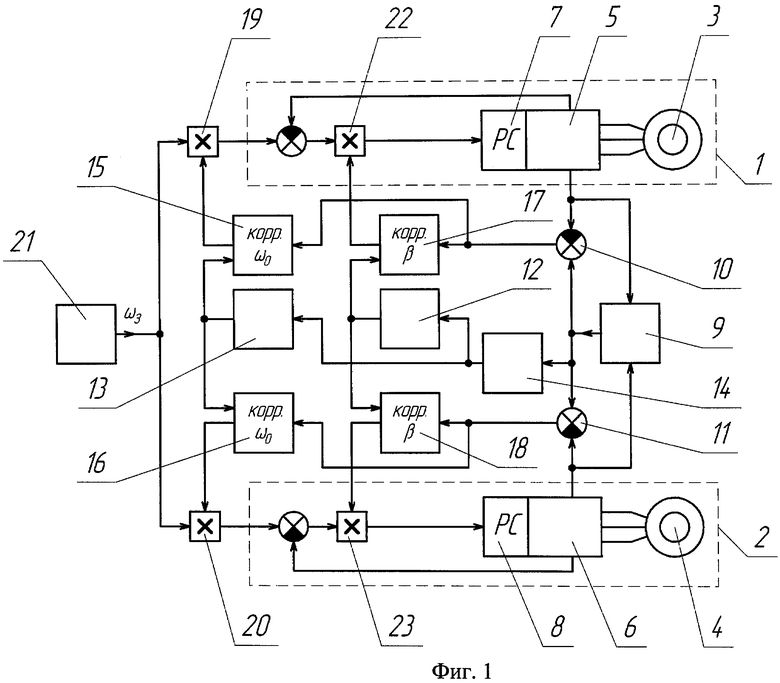
Суть предлагаемого способа выравнивания нагрузок на тяговые двигатели поясняется чертежами, где на фиг.1 приведена функциональная схема устройства выравнивания нагрузок, реализующего предлагаемый способ на примере двухдвигательного асинхронного тягового привода, а на фиг.2 - пример реализации корректирующих элементов указанного устройства.
Согласно изобретению для выравнивания нагрузок тяговых двигателей измеряют текущие значения их вращающих моментов, определяют среднее значение момента, а также отклонения моментов двигателей от среднего значения. С учетом величины и знака отклонения при работе тягового привода в области малых нагрузок корректируют частоту вращения идеального холостого хода данного электродвигателя с сохранением корректирующего воздействия по жесткости, а при повышенных нагрузках корректируют жесткость его механической характеристики с сохранением корректирующего воздействия по частоте вращения.
Ведущие оси транспортного средства согласно фиг.1 снабжены асинхронными частотно-регулируемыми приводами 1 и 2 с векторным управлением, содержащими электродвигатели 3, 4 и системы векторного управления 5, 6 с регуляторами скорости 7, 8.
Устройство выравнивания нагрузок содержит блок определения среднего значения момента 9, сравнивающие элементы 10, 11, определяющие отклонения вращающих моментов двигателей от среднего значения, релейные элементы 12, 13, входы которых соединены с выходом блока определения среднего значения 9 через низкочастотный фильтр 14, а выходы соединены с входами разрешения корректирующих элементов частоты вращения идеального холостого хода 15, 16 и жесткости механических характеристик 17, 18. Входы корректирующих элементов 15 и 17 соединены с выходом сравнивающего элемента 10, а корректирующих элементов 16, 18 - с выходом сравнивающего элемента 11. Выходы корректирующих элементов 15, 16 соединены с входами блоков перемножения 19, 20, вторые входы которых соединены с выходом задающего элемента по скорости 21. Выходы корректирующих элементов 17, 18 соединены с входами блоков перемножения 22, 23, на вторые входы которых поступают сигналы рассогласования по скорости.
Текущие значения тяговых усилий в предлагаемом устройстве определяют приближенно на основе сигналов о текущих значениях моментов тяговых двигателей, формируемых системами векторного управления 5, 6.
В режимах работы тягового привода, близких к холостому ходу, релейный элемент 13 разрешает работу корректирующих элементов частоты вращения идеального холостого хода 15, 16, которые вырабатывают корректирующие сигналы, изменяющиеся от единицы в большую или меньшую сторону в зависимости от величины и знака отклонения момента двигателя от среднего значения. В результате изменяются величины задающих воздействий на входах систем векторного управления, что приводит к выравниванию частот вращения идеального холостого хода двигателей. При увеличении нагрузки тягового привода и снятии разрешающего сигнала элементом 13 сигналы на выходах корректирующих элементов 15, 16 сохраняются.
При повышенных нагрузках релейный элемент 12 разрешает работу корректирующих элементов жесткости механических характеристик 17, 18, которые вырабатывают корректирующие сигналы, изменяющиеся от единицы в большую или меньшую сторону, в зависимости от величины и знака отклонения момента двигателя от среднего значения. В результате изменяются результирующие коэффициенты усиления регуляторов скорости 7, 8, что приводит к выравниванию жесткостей механических характеристик двигателей. При уменьшении нагрузки тягового привода и снятии разрешающего сигнала элементом 12 сигналы на выходах корректирующих элементов 17, 18 сохраняются.
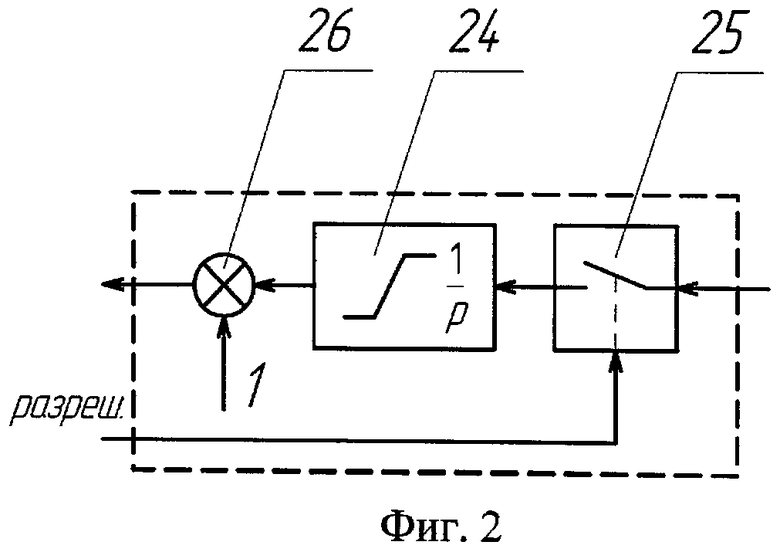
Корректирующие элементы 15, 16, 17, 18 выполнены (фиг.2) в виде интегратора 24 с ограничением, на вход которого через ключевой элемент 25, при наличии разрешения от релейного элемента, поступает сигнал рассогласования, пропорциональный отклонению момента данного двигателя от среднего значения момента. Выходной сигнал интегратора 24 алгебраически суммируется элементом 26 с единичным сигналом, формируя выходное корректирующее воздействие.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ЭЛЕКТРОВОЗА | 2012 |
|
RU2496661C1 |
| Электровоз с комбинированным приводом | 1978 |
|
SU763168A1 |
| Транспортное средство с линейным двигателем | 1982 |
|
SU1041367A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПОДВИЖНЫМ СОСТАВОМ | 1972 |
|
SU333079A1 |
| Электровоз с комбинированным приводом | 1979 |
|
SU897615A2 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ МНОГОКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2483950C2 |
| ЧЕТЫРЕХОСНАЯ ТЕЛЕЖКА ЛОКОМОТИВА | 2002 |
|
RU2244650C2 |
| Устройство для защиты от буксования и юза колесных пар электровоза | 1987 |
|
SU1438976A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР И ПОДАВЛЕНИЯ ФРИКЦИОННЫХ АВТОКОЛЕБАНИЙ В КИНЕМАТИЧЕСКОЙ ЦЕПИ ПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2004 |
|
RU2270766C2 |
| Способ регулирования уровня колебания в подвесках тягового двигателя электровоза и устройство для его осуществления | 2018 |
|
RU2704637C1 |
Изобретение относится к транспортной технике, в частности к асинхронному тяговому приводу электровозов. Для выравнивания нагрузок асинхронных тяговых двигателей электроподвижного состава воздействуют на параметры механических характеристик двигателей, для чего измеряют текущие значения их вращающих моментов, определяют среднее значение момента, а также отклонения моментов двигателей от среднего значения. С учетом величины и знака отклонений при работе тягового привода в области малых нагрузок корректируют частоту вращения идеального холостого хода данного электродвигателя с сохранением корректирующего воздействия по жесткости, а при повышенных нагрузках корректируют жесткость его механической характеристики с сохранением корректирующего воздействия по частоте вращения. Технический результат заключается в обеспечении равенства тяговых усилий двигателей при любом значении суммарного тягового усилия. 2 ил.
Способ выравнивания нагрузок асинхронных тяговых двигателей электроподвижного состава воздействием на параметры механических характеристик двигателей, отличающийся тем, что измеряют текущие значения их вращающих моментов, определяют среднее значение момента, а также отклонения моментов двигателей от среднего значения, и с учетом величины и знака отклонения при работе тягового привода в области малых нагрузок корректируют частоту вращения идеального холостого хода данного электродвигателя с сохранением корректирующего воздействия по жесткости, а при повышенных нагрузках корректируют жесткость его механической характеристики с сохранением корректирующего воздействия по частоте вращения.
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ НАГРУЗОК | 1972 |
|
SU425823A1 |
| СИСТЕМА ГРУППОВОГО ЭНЕРГОСНАБЖЕНИЯ АСИНХРОННЫХ ТЯГОВЫХ ДВИГАТЕЛЕЙ | 1999 |
|
RU2166441C2 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2207255C1 |
| DE 3737633 A1, 19.05.1988. | |||

