со
00
оо to
00 О)
Изобретение относится к области автоматического регулирования и может быть использовано в следящих системах, в частности работающих в условиях существенного искажения сигнала ошибки слежения.
Цель изобретения - повьшение точности и поддержание ошибки слежения в заданных пределах.
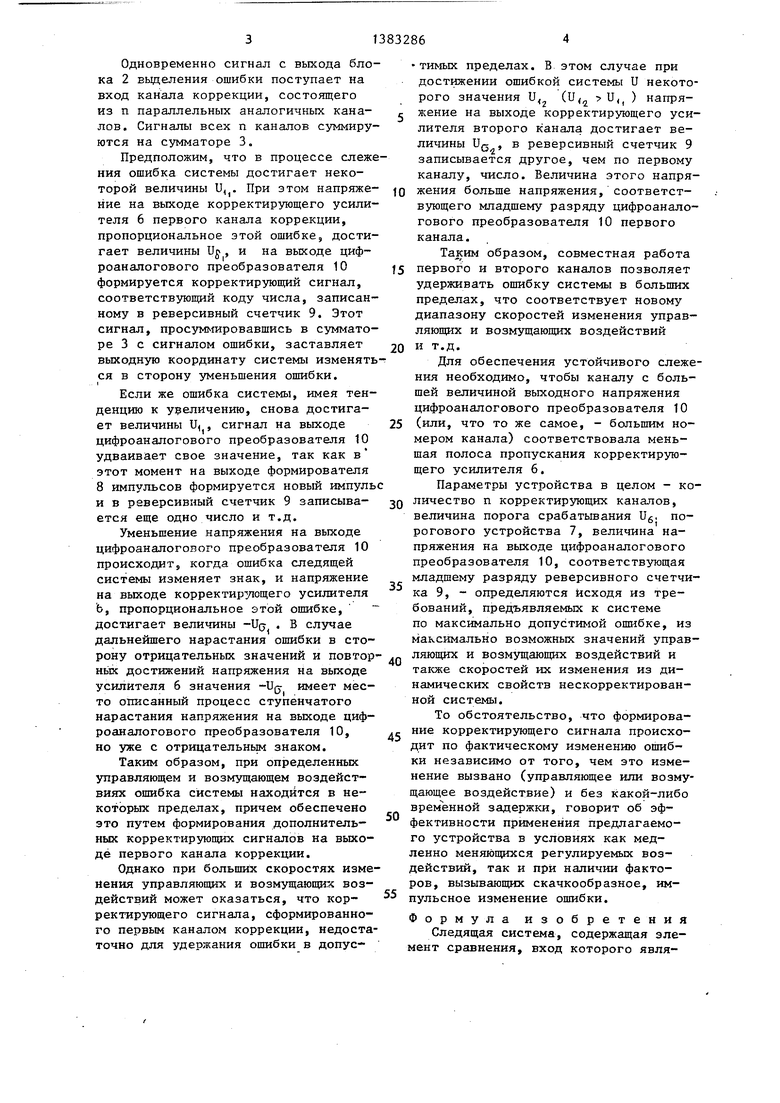
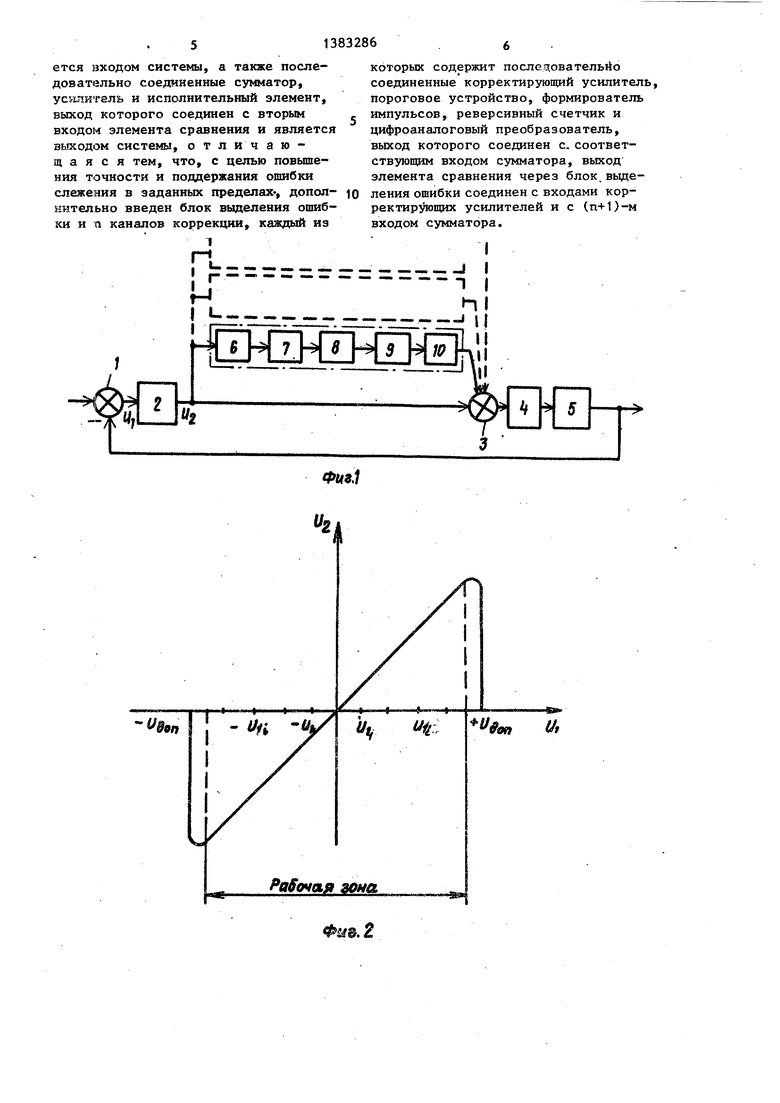
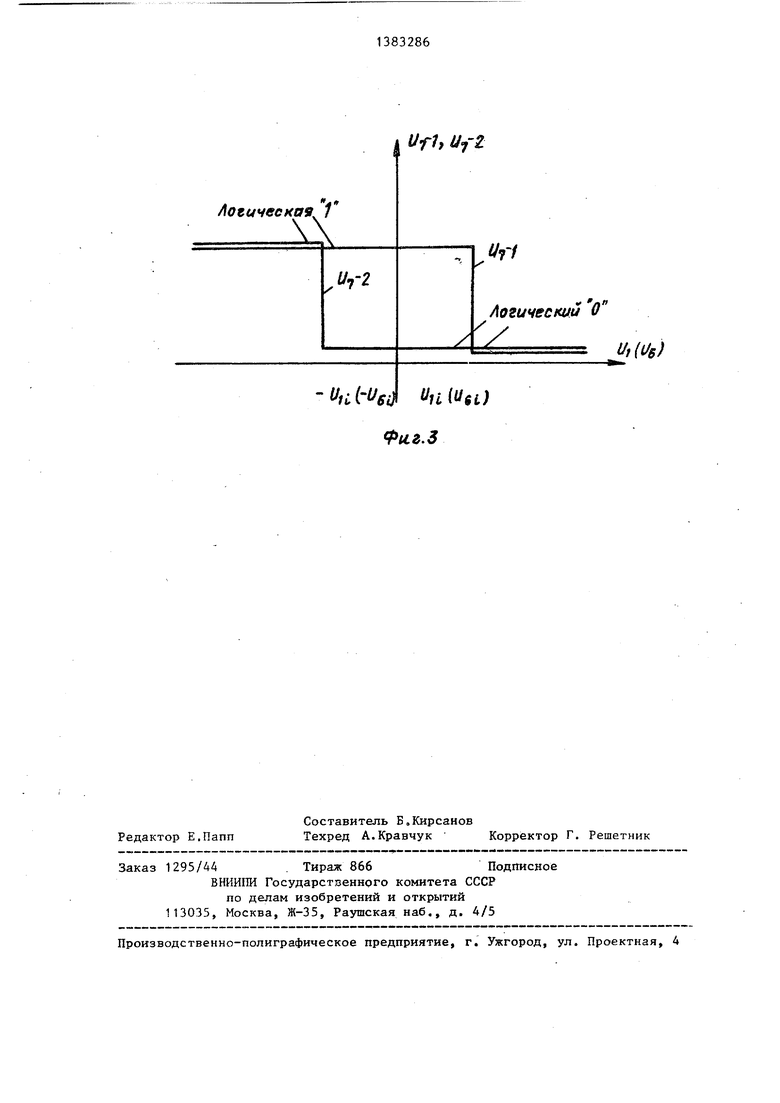
На фиг. 1 приведена функциональная схема устройства на фиг. 2 - пример статической характеристики преобразования ошибки слежения в блоке выделения ошибки; на фиг. 3 - статическая характеристика порогового устройства.
Следящая система (фиг.1) содержит элемент 1 сравнения, блок 2 выделения ошибки, сумматор 3, усилитель 4, исполнительный элемент 5, корректирующий усилитель 6, пороговое уст- ройство 7, формирователь 8 импульсов, реверсивный счетчик 9 и цифро- аналоговый преобразователь 10.
Блок 2 выделения ошибки является блоком, в статической характеристике: которого (фиг.2) отражены как физически обусловленные, так и специально вводям 1е свойства устройств съема и преобразования информации о в€шичине сигнала ошибки. Примерами блоков могут служить радиотелескопы с узкой диаграмт-юй направленности, фотоэлектронные датчики с ограниченным полем зрения и т.д. В таких системах даже при кратковременном выходе ошибки U, за пределы допустимых значений ±идд„ может произойти исчезновение сигнала и срыв сле- жггния.
Рассмотрим структуру одного из п каналов коррекции. Выходным устройством канала коррекции является корректирующий усилитель 6. Он предназначен для усиления сигнала ошибки U по напряжению и сглаживания высокочастотной составляющей ошибки, вызванной управляющим и возмущающим воздействиями. Фильтрующие свойства усилителя определяются его полосой пропускания, которая выбирается различной для всех п каналов коррекции максимальна при , минимальна при i п (i - номер канала коррекции) . Коэффициенты усиления усилителей К; всех п каналов одиндковы.
Величина напряжения порога срабатывания и,; для каждого из п каналов
коррекции выбирается различной и возрастает с увеличением номера канала i. Величина порога срабатывания
для канала с номером п выбирается исходя из величины максимально допустимой ошибки системы.
При достижении сигналом на входе порогового устройства 7 (фиг.З) значения +U, либо происходит его срабатывание и, в зависимости от знака ошибки системы, изменение выходного сигнала U - 1 (с уровня логической 1 до уровня логического
О), либо выходного сигнала U - 2 (с уровня логического О до уровня логической 1).
Выходные сигналы порогового устройства 7U-,- 1 йи7 -2 поступают
на соответствующие входы формирователя 8 импульсов.
Формирование импульсов на выходе формирователя 8 импульсов происходит при различных условиях: по одному из выходов - с логического О до 1, по другому выходу - с логической 1 до О. Эти сигналы поступают на входы, соответственно прямого и обратного счета реверсивного счетчика 9, который производит суммирование числа импульсов, поступающих на его входы, причем общая суъма
К г - 1,
где г - число импульсов, пришедших
на вход прямого счета 1 - число импульсов, пришедших
на вход обратного счета. В разрядах реверсивного счетчика 9 сумма К фиксируется в виде двоичного кода, который преобразовывается в корректирующий сигнал на вьжоде соответствующего цифроаналогового преобразователя 10, при этом каналу с большей величиной порога срабатывания и§-, (большим номером i) порогового устройства соответствует большая величина напряжения на выходе цифроаналогового преобразователя 10, приходящаяся на единицу младшего разряда реверсивного счетчика 9.
Система работает следующим образом.
Сигнал и5 с выхода блока 2 выде- ления ошибки, проходя через суьгма- тор 3, попадает на вход усилителя 4, где усиливается до значений, необходимых для управления исполнительным элементом 5.
Одновременно сигнал с выхода блока 2 выделения ошибки поступает на вход канала коррекции, состоящего из п параллельных аналогичных кана- лов. Сигналы всех п каналов суммируются на сумматоре 3„
Предположим, что в процессе слежения ошибка системы достигает некоторой величины и,|. При этом напряже- ние на выходе корректирующего усилителя 6 первого канала коррекции, пропорциональное этой ошибке, достигает величины Uj, и на выходе циф- роанапогового преобразователя 10 формируется корректирующий сигнал, соответствующий коду числа, записанному в реверсивный счетчик 9. Этот сигнал, просуммировавшись в сумматоре 3 с сигналом ошибки, заставляет выходную координату системы изменяться в сторону уменьшения ошибки.
1
Если же ошибка системы, имея тенденцию к увеличению, снова достигает величины и,, сигнал на выходе цифроаналогового преобразователя 10 удваивает свое значение, так как в этот момент на выходе формирователя 8 импульсов формируется новый импуль и в реверсивный счетчик 9 записыва- ется еще одно число и т.д.
Уменьшение напряжения на выходе цифроаналогового преобразователя 10 происходит, когда ошибка следящей системы изменяет знак, и напряжение на выходе корректирзтощего усилителя Ь, пропорциональное этой ошибке, достигает величины -Up . В случае дальнейшего нарастания ошибки в сторону отрицательных значений и повтор ньк достижений напряжения на выходе усилителя 6 значения -Ug- имеет место описанный процесс ступенчатого нарастания напряжения на выходе циф- роаналогового преобразователя 10, но уже с отрицательньм знаком.
Таким образом, при определенных управляющем и возмущающем воздействиях ошибка системы находится в не которых пределах, причем обеспечено это путем формирования дополнительных корректирующих сигналов на выходе первого канала коррекции.
Однако при больших скоростях изменения управляющих и возмущающих воз
действий может оказаться, что корректирующего сигнала, сформированного первым каналом коррекции, недостаточно для удержания ошибки в допус
J5 20 25зо
д/,
45
50
5
тимых пределах. В этом случае при достижении ошибкой системы U некоторого значения U (U U, ) напряжение на выходе корректирующего усилителя второго канала достигает величины UQ ) в реверсивный счетчик 9 записывается другое, чем по первому каналу, число. Величина этого напряжения больше напряжения, соответствующего младшему разряду цифроаналогового преобразователя 10 первого канала.
Таким образом, совместная работа первого и второго каналов позволяет удерживать ошибку системы в больших пределах, что соответствует новому диапазону скоростей изменения управляющих и возмущающих воздействий и т.д.
Для обеспечения устойчивого слежения необходимо, чтобы каналу с большей величиной выходного напряжения цифроаналогового преобразователя 10 (или, что то же самое, - большим номером канала) соответствовала меньшая полоса пропускания корректирующего усилителя 6,
Параметры устройства в целом - ко- лргчество п корректирующих каналов, величина порога срабатывания Ug, порогового устройства 7, величина напряжения на выходе цифроаналогового преобразователя 10, соответствующая младшему разряду реверсивного счетчика 9, - определяются исходя из требований, предъявляемых к системе по максимально допустимой ошибке, из максимально возможных значений управляющих и возмущающих воздействий и также скоростей их изменения из динамических свойств нескорректированной системы.
То обстоятельство, что формирование корректирующего сигнала происходит по фактическому изменению ошибки независимо от того, чем это изменение вызвано (управляющее или возмущающее воздействие) и без какой-либо временной задержки, говорит об эффективности применения предлагаемого устройства в условиях как медленно меняющихся регулируемых воздействий, так и при наличии факторов, вызывающих скачкообразное, импульсное изменение ошибки.
Формула изобретения Следящая система, содержащая элемент сравнения, вход которого является входом системы, а также последовательно соединенные сумматор, усялитель и исполнительный элемент, выход которого соединен с вторым входом элемента сравнения и является выходом системы, отличающаяся тем, что, с целью повышения точности и поддержания ошибки слежения в заданных пределах-, дополнительно введен блок выделения ошибки и с1 каналов коррекции, каждый из
I
которых содержит последовательйо соединенные корректирзгащий усилител пороговое устройство, формирователь импульсов, реверсивный счетчик и цифроаналоговый преобразователь, выход которого соединен с. соответствующим входом сумматора, выход элемента сравнения через блок,вьще- ления ошибки соединен с входами корректирующих усилителей и с (п+1)-м входом сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальная следящая система | 1974 |
|
SU487375A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Устройство для считывания графической информации | 1974 |
|
SU525976A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Устройство для разделения направлений передачи в дуплексных системах связи | 1984 |
|
SU1223373A2 |
| Аналого-цифровой интегратор | 1982 |
|
SU1037280A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
Изобретение относится к автоматическому регулированию и может быть использовано в следящих системах, в частности, работающих в условиях существенного искажения сигнала ошибки слежения. Целью изобретения является повышение точности и поддержание ошибки слежения в заданных пределах. Система содержит элемент сравнения, блок выделения ошибки, сумматор, усилитель, исполнительный элемент и п однотипных каналов, каждый из которых содержит корректирующий усилитель, пороговое устройство, формирователь импульсов, реверсивный счетчик и цифроаналоговый преобразователь. Сущность работы системы заключается в том, что при увеличении сигнала ошибки слежения до определенных пределов (разных для каждого канала) ступенчатым образом в сигнал ошибки вводится тот или иной постоянный сигнал, который уменьшает ошибку слежения, списываясь по мере ее уменьшения, 3 ил. с « (Л
Фт.2
Аогичесная г
/Л-ад fJH(6i) Ри,г.З
Ufl, tlfZ
fJrf
/
Логический О
и, (i/e)
| Следящая система | 1972 |
|
SU466486A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1979 |
|
SU822143A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
