Изобретение относится к области электромеханики и может быть использовано для приведения в действие контактных систем устройств регулирования напряжения силовых трансформаторов под нагрузкой.
Наиболее близким по технической сущности и достигаемому техническому результату к заявляемому приводу устройства регулирования напряжения силовых трансформаторов под нагрузкой является привод устройства регулирования напряжения силовых трансформаторов под нагрузкой (см. а.с. СССР №1108524, М. кл.6 H01H 21/36, от 22.12.1981 г., опубл. 15.04.1984 г.), включающий электродвигатель с выходным валом, приводной вал устройства регулирования, датчик положения, систему управления привода устройства регулирования под нагрузкой.
В приводе устройства регулирования напряжения силовых трансформаторов под нагрузкой датчик положения выполнен с упором. Приводной вал снабжен ведущим колесом. Выходной вал снабжен ведомым колесом. Блок передачи момента движения на выходной вал содержит механизм расцепления и механизм блокировки, включающий ось с флажком, а датчик положения установлен с возможностью взаимодействия в конечных положениях его упора с флажком. Механизм блокировки снабжен стаканом с пазом, кулачком с зубом и выступами, а механизм расцепления выполнен в виде оси, пружины, втулки и защелок, каждая из которых выполнена с хвостовиком и зубом. Выходной вал выполнен с пазами, смещенными вдоль его оси. Ось механизма расцепления жестко закреплена на втулке и ведомом колесе. Защелки свободно размещены на оси механизма расцепления и связаны его пружиной. Зубья защелок введены в пазы выходного вала, а кулачок механизма блокировки жестко закреплен на его оси, свободно установленной в неподвижном стакане. Кулачок установлен так, что его зуб размещен в пазу стакана, а каждый его выступ имеет возможность взаимодействия в конечных положениях с хвостовиком соответствующей защелки в зависимости от направления вращения.
Известный привод характеризуется низкой эксплуатационной надежностью, высокой трудоемкостью при изготовлении и низкой точностью позиционирования при регулировании под нагрузкой.
Это объясняется тем, что привод представляет собой сложное электромеханическое устройство с множеством взаимодействующих между собой деталей, снабженных флажками, втулками, пружинами, защелками, хвостовиками, зубьями. В процессе работы все эти элементы быстро изнашиваются и снижается точность позиционирования при регулировании напряжения силового трансформатора под нагрузкой. Наличие большого количества взаимодействующих между собой деталей требует очень высокой точности при изготовлении, что сопряжено с большими трудозатратами и высокой трудоемкостью при изготовлении такого привода. Малейшее отклонение в размерах флажков, втулок, пружин, защелок, хвостовика, зубьев приведет к снижению надежности привода, нестабильной его работе, что, в свою очередь, приведет к нарушению работы силового трансформатора.
В основу изобретения поставлена задача усовершенствовать привод устройства регулирования напряжения силового трансформатора под нагрузкой путем введения новых конструктивных элементов, новых связей между конструктивными элементами, нового выполнения конструктивных элементов, что обеспечит повышение его эксплуатационной надежности, снижение трудоемкости при изготовлении, повышение точности позиционирования при регулировании.
Поставленная задача решается тем, что в приводе устройства регулирования напряжения силового трансформатора под нагрузкой, включающем электродвигатель с выходным валом, приводной вал устройства регулирования, датчик положения, систему управления привода устройства регулирования под нагрузкой, согласно техническому решению новым является то, что в качестве электродвигателя привод содержит вентильный электродвигатель с постоянными магнитами, выходной вал которого непосредственно соединен с приводным валом устройства регулирования под нагрузкой (РПН), система управления привода устройства регулирования под нагрузкой связана с устройством дистанционного управления, выполнена цифровой и содержит программируемый логический контроллер, блок силовой коммутации обмоток вентильного двигателя с постоянными магнитами, датчик угла коммутации обмоток двигателя, датчик положения и скорости вала двигателя, панель управления, панель индикации положения устройства регулирования под нагрузкой и источник бесперебойного питания, причем выход источника бесперебойного питания соединен с первым входом программируемого логического контроллера, второй вход программируемого логического контроллера соединен с выходом панели управления, третий его вход соединен с выходом устройства дистанционного управления приводом устройства регулирования под нагрузкой, четвертый его вход соединен с первым выходом блока силовой коммутации обмоток вентильного двигателя с постоянными магнитами, первый выход программируемого логического контроллера соединен с первым входом блока силовой коммутации, второй его выход соединен с входом панели индикации положения устройства регулирования под нагрузкой, третий его выход соединен с входом устройства дистанционного управления приводом устройства регулирования под нагрузкой, второй вход блока силовой коммутации соединен с источником напряжения, второй его выход соединен с обмотками вентильного двигателя с постоянными магнитами, выход датчик угла коммутации соединен с пятым входом программируемого логического контроллера и третьим входом блока силовой коммутации, выход датчика положения и скорости соединен с шестым входом программируемого логического контроллера и четвертым входом блока силовой коммутации, при этом датчик угла коммутации и датчик положения и скорости размещены на общей оси с вентильным двигателем с постоянными магнитами.
Причинно-следственная связь между совокупностью существенных признаков изобретения и достигаемым техническим результатом заключается в следующем.
Вентильный электродвигатель с постоянными магнитами обеспечивает повышение эксплуатационной надежности привода устройства РПН и повышение точности позиционирования при регулировании, так как в нем отсутствуют взаимодействующие между собой детали, снабженные флажками, втулками, пружинами, защелками, хвостовиками, зубьями. Вентильный электродвигатель с постоянными магнитами позволяет определять момент нагрузки на валу устройства РПН, так как величина развиваемого электромагнитного момента имеет линейную зависимость от тока нагрузки. Это дает возможность осуществлять мониторинг работы устройства РПН, что способствует повышению точности позиционирования при регулировании. Минимальное значение токов холостого хода и рабочих токов вентильного электродвигателя с постоянными магнитами позволяет достаточно точно измерять нагрузку на привод и оптимизировать режим работы. У вентильного электродвигателя с постоянными магнитами отсутствуют обмотки на роторе, поэтому нет тепловыделения от ротора. Это обуславливает увеличение срока службы привода, так как увеличивается ресурс изоляционных материалов. Привод, содержащий вентильный электродвигатель с постоянными магнитами, способен работать в нестандартных режимах с возможными перегрузками.
Программируемый логический контроллер предназначен для контроля текущего положения устройства регулирования напряжения силового трансформатора под нагрузкой (устройства РПН). Блок силовой коммутации отрабатывает заданный режим переключения устройства РПН по положению, скорости перемещения и току. Датчик угла коммутации предназначен для измерения положения ротора вентильного двигателя относительно статора и определяет угол коммутации фазных обмоток вентильного двигателя. Датчик положения и скорости предназначен для измерения угловой скорости вращения вала вентильного двигателя, определения его положения и подсчета количества оборотов вала двигателя и обеспечивает высокую точность позиционирования при переключении. Источник бесперебойного питания обеспечивает бесперебойную работу привода. Панель индикации положения отображает данные о текущем положении устройства РПН. Панель управления предназначена для подачи команд в режиме автономного управления.
После подключения первого входа программируемого логического контроллера и второго входа блока силовой коммутации к источникам питания от устройства дистанционного управления приводом устройства РПН на третий вход программируемого логического контроллера поступает команда выполнить переключение n+1 или n-1, где n - текущее положение устройства РПН, то есть перейти в следующее его положение или вернуться в предыдущее. Программируемый логический контроллер контролирует текущее положение устройства РПН и сравнивает его с полученной командой. Если устройство РПН не находится в крайнем положении, то с первого выхода программируемого логического контроллера на первый вход блока силовой коммутации поступает команда выполнить переключение. Блок силовой коммутации отрабатывает заданный режим переключения устройства РПН, и на его втором выходе возбуждаются фазные токи для управления вращением вала вентильного двигателя. С выхода датчика угла коммутации на третий вход блока силовой коммутации поступает сигнал обратной связи для синхронизации момента переключения фазных токов вентильного двигателя. Одновременно с выхода датчика положения и скорости - на четвертый вход блока силовой коммутации поступает сигнал о положении и скорости вала вентильного двигателя. В блоке силовой коммутации, содержащем контур положения, контур скорости и контур тока, осуществляется пропорционально-интегральное регулирование, обеспечивая заданное перемещение по времени и положению, которое, при необходимости, в процессе эксплуатации может быть изменено в широком диапазоне. Одновременно с выхода датчика угла коммутации поступает сигнал на пятый вход программируемого логического контроллера, а с выхода датчика положения и скорости на шестой вход программируемого логического контроллера. Программируемый логический контроллер осуществляет по этим сигналам арифметически-логический контроль позиционирования (перемещения) устройства РПН и по результатам контроля, при необходимости, вырабатывает со своего первого выхода на первый вход блока силовой коммутации корректирующие команды. С первого выхода блока силовой коммутации на четвертый вход программируемого логического контроллера поступают сигналы о состоянии режима переключения устройства РПН, в частности о величине тока, о текущем положении устройства РПН, о том, идет ли переключение в настоящий момент. С третьего выхода программируемого логического контроллера на вход устройства дистанционного управления приводом устройства РПН поступают все необходимые для управления сигналы, которые могут быть расширены до любого цифрового стандарта, в том числе и для систем мониторинга. Со второго выхода программируемого логического контроллера поступает сигнал о текущем положении устройства РПН на вход панели индикации положения. Программируемый логический контроллер хранит сведения о текущем положении устройства РПН во флеш-памяти при пропадании питания. С выхода панели управления на второй вход программируемого логического контроллера в ручном режиме подаются команды, аналогичные командам от устройства дистанционного управления приводом устройства РПН.
Заявляемым приводом, содержащим в качестве электродвигателя вентильный двигатель с постоянными магнитами, выходной вал которого непосредственно соединен с приводным валом устройства регулирования под нагрузкой (РПН), в котором система управления привода устройства РПН выполнена цифровой и содержит программируемый логический контроллер, блок силовой коммутации обмоток вентильного двигателя с постоянными магнитами, датчик угла коммутации обмоток двигателя, датчик положения и скорости вала двигателя, панель управления, панель индикации положения устройства РПН и источник бесперебойного питания, обеспечивается повышение его эксплуатационной надежности, снижение трудоемкости при изготовлении, повышение точности позиционирования при регулировании, так как отсутствуют механические детали. При изготовлении такого привода существенно уменьшаются затраты времени и снижается сложность технологических операций. Износ составляющих его блоков и датчиков значительно ниже, а точность выполнения команд существенно выше.
Привод устройства регулирования напряжения силового трансформатора под нагрузкой поясняется чертежом, на котором приведена блок-схема заявляемого привода.
Привод устройства регулирования напряжения силового трансформатора под нагрузкой содержит вентильный электродвигатель 1 с постоянными магнитами, выходной вал 2 которого непосредственно соединен с приводным валом 3 устройства РПН (на чертеже не показано). Привод содержит также программируемый логический контроллер 4, блок 5 силовой коммутации обмоток вентильного двигателя 1 с постоянными магнитами, датчик 6 угла коммутации обмоток вентильного двигателя 1, датчик 7 положения и скорости вала вентильного двигателя 1, панель 8 управления, панель 9 индикации положения устройства РПН, источник 10 бесперебойного питания. Управление приводом осуществляется в автономном режиме с помощью панели управления 8.
Выход источника 10 бесперебойного питания соединен с первым входом программируемого логического контроллера 4, второй вход программируемого логического контроллера 4 соединен с выходом панели 8 управления, третий его вход соединен с выходом устройства дистанционного управления приводом устройства РПН, четвертый его вход соединен с первым выходом блока 5 силовой коммутации обмоток вентильного двигателя 1 с постоянными магнитами, пятый его вход соединен с выходом датчика 6 угла коммутации, шестой его вход соединен с выходом датчика 7 положения и скорости, первый выход программируемого логического контроллера 4 соединен с первым входом блока 5 силовой коммутации, второй его выход соединен с входом панели 9 индикации положения устройства РПН, третий его выход соединен с входом устройства дистанционного управления приводом устройства РПН, второй вход блока 5 силовой коммутации соединен с источником напряжения, третий его вход соединен с выходом датчика 6 угла коммутации, четвертый его вход соединен с выходом датчика 7 положения и скорости, второй его выход соединен с обмотками вентильного двигателя 1 с постоянными магнитами, при этом датчик 6 угла коммутации и датчик 7 положения и скорости размещены на общей оси с вентильным двигателем 1 с постоянными магнитами.
Привод устройства регулирования напряжения силового трансформатора под нагрузкой работает следующим образом.
После подключения первого входа программируемого логического контроллера 4 к источнику 10 бесперебойного питания и второго входа блока 5 силовой коммутации к источнику напряжения от устройства дистанционного управления приводом устройства РПН на третий вход программируемого логического контроллера 4 поступает команда выполнить переключение n+1 или n-1, где n - текущее положение устройства РПН, то есть перейти в следующее его положение или вернуться в предыдущее. Программируемый логический контроллер 4 контролирует текущее положение устройства РПН и сравнивает его с полученной командой. Если устройство РПН не находится в крайнем положении, то с первого выхода программируемого логического контроллера 4 на первый вход блока 5 силовой коммутации поступает команда выполнить переключение. Блок 5 силовой коммутации отрабатывает заданный режим переключения устройства РПН, и на его втором выходе возбуждаются фазные токи для управления вращением вала вентильного двигателя 1. С выхода датчика 6 угла коммутации на третий вход блока 5 силовой коммутации поступает сигнал обратной связи для синхронизации момента переключения фазных токов вентильного двигателя. Одновременно с выхода датчика 7 положения и скорости на четвертый вход блока 5 силовой коммутации поступает сигнал о положении и скорости вала вентильного двигателя 1. В блоке 5 силовой коммутации, содержащем контур положения, контур скорости и контур тока, осуществляется пропорционально-интегральное регулирование, обеспечивая заданное перемещение по времени и положению. Одновременно с выхода датчика 6 угла коммутации поступает сигнал на пятый вход программируемого логического контроллера 4, а с выхода датчика 7 положения и скорости - на шестой вход программируемого логического контроллера 4. Программируемый логический контроллер 4 осуществляет по этим сигналам арифметически-логический контроль позиционирования (перемещения) устройства РПН и по результатам контроля, при необходимости, вырабатывает со своего первого выхода на первый вход блока 5 силовой коммутации корректирующие команды. С первого выхода блока 5 силовой коммутации на четвертый вход программируемого логического контроллера 4 поступают сигналы о состоянии режима переключения устройства РПН, в частности о величине тока, о текущем положении устройства РПН, о том, идет ли переключение в настоящий момент. С третьего выхода программируемого логического контроллера 4 на вход устройства дистанционного управления приводом устройства РПН поступают все необходимые для контроля переключения сигналы, которые могут быть расширены до любого цифрового стандарта, в том числе и для систем мониторинга. Со второго выхода программируемого логического контроллера 4 поступает сигнал о текущем положении устройства РПН на вход панели 9 индикации положения. Программируемый логический контроллер 4 хранит сведения о текущем положении устройства РПН во флеш-памяти при пропадании питания. С выхода панели 8 управления на второй вход программируемого логического контроллера 4 в ручном режиме подаются команды, аналогичные командам от устройства дистанционного управления приводом устройства РПН.
Как видно из вышеизложенного, в заявляемом приводе устройства регулирования напряжения силового трансформатора под нагрузкой обеспечивается повышение его эксплуатационной надежности, снижение трудоемкости при изготовлении, повышение точности позиционирования при регулировании, так как вместо механических деталей используются программируемый логический контроллер 4, предназначенный для приема управляющих сигналов от устройства дистанционного управления приводом устройства РПН, контроля текущего положения устройства РПН, обработки и корректировки состояния переключения и передачи сигналов о положении, состоянии и режиме привода в устройство дистанционного управления приводом устройства РПН, блок 5 силовой коммутации, который отрабатывает заданный режим переключения устройства РПН по положению, скорости перемещения и току и контролируется программируемым логическим контроллером 4, а также датчик 6 угла коммутации, предназначенный для измерения положения ротора вентильного двигателя 1 относительно статора и определения угла коммутации фазных обмоток вентильного двигателя 1, датчик 7 положения и скорости вала двигателя, предназначенный для измерения угловой скорости вращения вала вентильного двигателя 1, определения его положения и подсчета количества оборотов, обеспечивающий высокую точность позиционирования при переключении. Используются также источник 10 бесперебойного питания, обеспечивающий бесперебойную работу привода, панель 9 индикации положения, отображающая данные о текущем положении устройства РПН, панель 8 управления, предназначенная для подачи команд в режиме ручного управления. При изготовлении такого привода существенно уменьшаются затраты времени и снижается сложность технологических операций. Износ составляющих его блоков и датчиков значительно ниже, а точность выполнения команд существенно выше.
В заявляемом приводе устройства регулирования напряжения силового трансформатора под нагрузкой используется вентильный двигатель 1 с возбуждением от постоянных магнитов. В настоящее время этот тип электродвигателей является наиболее перспективным из применяемых в регулируемых приводах малой и средней мощности. К конструктивным и технико-эксплуатационным преимуществам таких двигателей можно отнести то, что у них отсутствуют скользящие электрические контакты и узлы, требующие обслуживания, за счет чего повышается их ресурс и надежность по сравнению с двигателями постоянного тока или асинхронными двигателями с явно выраженной обмоткой на роторе. Вентильные двигатели характеризуются большой перегрузочной способностью по моменту (кратковременно кратность максимального момента равна 5 и более), а величина развиваемого при этом электромагнитного момента имеет линейную зависимость от тока нагрузки, а значит, по величине тока можно определять момент нагрузки на валу устройства РПН и таким образом осуществлять мониторинг работы устройства РПН. Минимальное значение токов холостого хода и рабочих токов в вентильном двигателе позволяет достаточно точно измерять нагрузку на привод и оптимизировать режим работы. КПД вентильных двигателей превышает 90% и мало изменяется при изменении нагрузки по мощности и при колебаниях напряжения питающей сети (у асинхронных двигателей максимальный КПД составляет не более 86% и зависит от изменений нагрузки). Вентильные двигатели имеют низкий перегрев, за счет чего повышается срок службы привода, так как благодаря более низким температурам увеличивается ресурс изоляционных материалов. Отсутствие у вентильного двигателя обмоток на роторе обуславливает отсутствие тепловыделения ротором. Это позволяет приводу работать в нестандартных режимах с возможными перегрузками. Вентильные двигатели имеют значительный срок службы и высокую надежность. Срок службы вентильного двигателя увеличивается также за счет возможности оптимизации режимов работы по скорости и нагрузке. Вентильные двигатели имеют минимальные массогабаритные показатели при прочих равных условиях, более простую схему преобразователя по сравнению с асинхронными, а значит, стоимость преобразователя при соизмеримой мощности будет меньше. Магнитная система вентильных двигателей состоит из постоянных магнитов и ферромагнитных концентраторов, поэтому величина магнитной индукции в рабочем зазоре таких двигателей может быть высокой и даже превышать величину остаточной магнитной индукции используемых постоянных магнитов.
Программируемый логический контроллер 4 может быть выполнен на базе любого PC-совместимого промышленного контроллера, например ХР-8341 фирмы ICPDAS, ARK-1370 фирмы Advantech или индивидуальной разработки на микроконтроллерах фирм Atmel, PIC и др.
Блок 5 силовой коммутации может быть выполнен на базе цифрового следящего привода, например Xenus XTL фирмы Copley Control Corp., или других производителей данного типа оборудования.
Датчик 6 угла коммутации может быть выполнен на оптических элементах, на датчиках Холла, или может быть использован датчик, встроенный в конструкцию вентильного двигателя 1.
В качестве датчика 7 положения и скорости вала двигателя может быть использован энкодер, например ERN 120 фирмы HEIDENHAIN, или другой.
В качестве источника 10 бесперебойного питания используется промышленный источник бесперебойного питания, например, фирмы American-Power-Conversion.
Панель 8 управления и панель 9 индикации положения могут быть выполнены выносными, размещенными на двери шкафа привода устройства РПН, или интегрированы в программируемый логический контроллер 4 и могут быть выбраны от любого производителя данного типа устройств.
Заявляемый привод устройства РПН может быть изготовлен на известном оборудовании и с использованием известных материалов и средств, что подтверждает его промышленную пригодность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2368059C2 |
| Система управления преобразователя электропривода с регулируемой скоростью с синхронным бесщеточным двигателем на постоянных магнитах | 2024 |
|
RU2834010C1 |
| МЕХАТРОННЫЙ ТЯГОВЫЙ МОДУЛЬ | 2016 |
|
RU2621410C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ НАПРЯЖЕНИЯ В ЭЛЕКТРИЧЕСКОЙ СЕТИ С ПРИМЕНЕНИЕМ FUZZY-ЛОГИКИ | 2010 |
|
RU2416855C1 |
| ПРИВОД ВРАЩЕНИЯ ВОЛНОВОДНО-ЩЕЛЕВОЙ АНТЕННЫ | 2011 |
|
RU2458435C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2016 |
|
RU2646934C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| Многоканальный коммутатор индуктивных нагрузок | 1982 |
|
SU1043824A1 |
Изобретение относится к области электротехники и может быть использовано для приведения в действие контактных систем устройств регулирования напряжения силовых трансформаторов под нагрузкой. Технический результат: повышение эксплуатационной надежности привода, снижение трудоемкости при изготовлении, повышение точности позиционирования при регулировании. Привод содержит вентильный электродвигатель (1) с постоянными магнитами, выходной вал (2) которого соединен с приводным валом (3) устройства РПН, программируемый логический контроллер (4), блок (5) силовой коммутации обмоток вентильного двигателя (1) с постоянными магнитами, датчик (6) угла коммутации обмоток вентильного двигателя (1), датчик (7) положения и скорости вала вентильного двигателя (1), панель (8) управления, панель (9) индикации положения устройства РПН, источник (10) бесперебойного питания. Выход источника (10) соединен с первым входом контроллера (4), второй вход контроллера (4) соединен с выходом панели (8), третий его вход соединен с выходом устройства дистанционного управления приводом устройства РПН, четвертый его вход соединен с первым выходом блока (5), пятый его вход соединен с выходом датчика 6, шестой его вход соединен с выходом датчика (7), первый выход контроллера (4) соединен с первым входом блока (5), второй его выход соединен с входом панели (9), третий его выход соединен с входом устройства дистанционного управления приводом устройства РПН, второй вход блока (5) соединен с источником напряжения, третий его вход соединен с выходом датчика (6), четвертый его вход соединен с выходом датчика (7), второй его выход соединен с обмотками вентильного двигателя (1), при этом датчик (6) и датчик (7) размещены на общей оси с вентильным двигателем (1). 1 ил.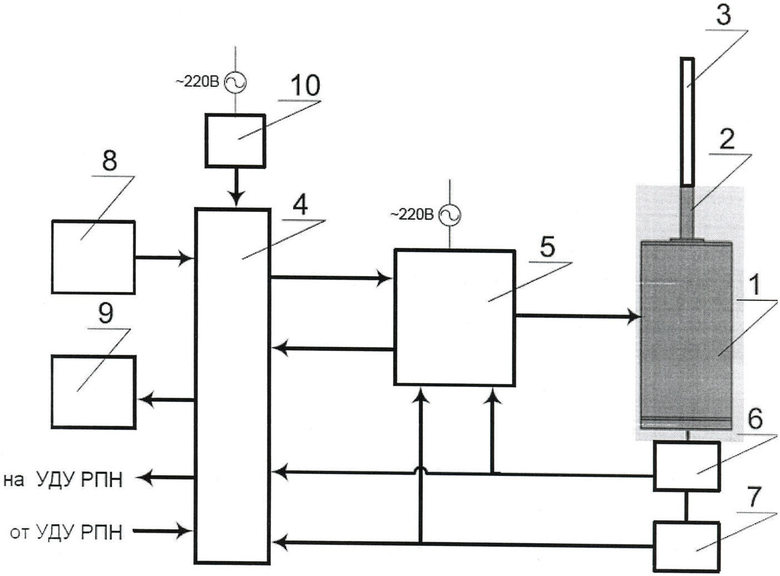
Привод устройства регулирования напряжения силового трансформатора под нагрузкой, включающий электродвигатель с выходным валом, приводной вал устройства регулирования, датчик положения, систему управления привода устройства регулирования под нагрузкой, отличающийся тем, что в качестве электродвигателя привод содержит вентильный электродвигатель с постоянными магнитами, выходной вал которого непосредственно соединен с приводным валом устройства регулирования под нагрузкой (РПН), система управления привода устройства регулирования под нагрузкой связана с устройством дистанционного управления, выполнена цифровой и содержит программируемый логический контроллер, блок силовой коммутации обмоток вентильного двигателя с постоянными магнитами, датчик угла коммутации обмоток двигателя, датчик положения и скорости вала двигателя, панель управления, панель индикации положения устройства регулирования под нагрузкой и источник бесперебойного питания, причем выход источника бесперебойного питания соединен с первым входом программируемого логического контроллера, второй вход программируемого логического контроллера соединен с выходом панели управления, третий его вход соединен с выходом устройства дистанционного управления приводом устройства регулирования под нагрузкой, четвертый его вход соединен с первым выходом блока силовой коммутации обмоток вентильного двигателя с постоянными магнитами, первый выход программируемого логического контроллера соединен с первым входом блока силовой коммутации, второй его выход соединен с входом панели индикации положения устройства регулирования под нагрузкой, третий его выход соединен с входом устройства дистанционного управления приводом устройства регулирования под нагрузкой, второй вход блока силовой коммутации соединен с источником напряжения, второй его выход соединен с обмотками вентильного двигателя с постоянными магнитами, выход датчика угла коммутации соединен с пятым входом программируемого логического контроллера и третьим входом блока силовой коммутации, выход датчика положения и скорости соединен с шестым входом программируемого логического контроллера и четвертым входом блока силовой коммутации, при этом датчик угла коммутации и датчик положения и скорости размещены на общей оси с вентильным двигателем с постоянными магнитами.
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНАЛЬНЫХ ВОЗМОЖНОСТЕЙ ПЕРЕКЛЮЧАТЕЛЯ ОТВОДОВ | 1998 |
|
RU2209500C2 |
| Привод переключателя для силового трансформатора | 1981 |
|
SU1108524A1 |
| СПОСОБ ПОЛУЧЕНИЯ АРОМАТИЗИРОВАННОГО ВАФЕЛЬНОГО ХЛЕБА | 2009 |
|
RU2409059C1 |
| US 5516992 A, 14.05.1996 | |||
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2035603C1 |
| DE 4214431 A1, 11.11.1993 | |||
| JP 2000068131 A, 03.03.2000 | |||
| ГЛИНООЧИСТИТЕЛЬ | 1992 |
|
RU2054998C1 |
| ПИТАТЕЛЬНАЯ СРЕДА ДЛЯ ВЫРАЩИВАНИЯ ШТАММА STRERTOCOCCUS FAECIUM СТФ-1/56 | 1994 |
|
RU2086647C1 |

