Предложенное изобретение относится к технике связи и может использоваться для определения местоположения подвижных объектов.
Известна система определения местоположения подвижных объектов (заявка РФ на изобретение №2005125339, кл. G01S 5/00, опубл. 20.02.2007 г.), содержащая подвижные объекты, станции приема радиосигналов сигнализации (базовые станции), диспетчерскую станцию.
Недостатком данной системы является то, что соединения между базовыми станциями и диспетчерской станцией осуществляется дуплексной радиосетью, где качество соединения существенно зависит от физических параметров среды распространения, а также от соотношения сигнал/шум в принимаемом сигнале.
Наиболее близкой системой того же назначения к заявленной по совокупности признаков является система определения местоположения подвижных объектов (свидетельство на полезную модель РФ №23030, Кл. H04B 7/26, G01S 5/00), включающая искусственные спутники Земли, диспетчерскую станцию, приемные станции (базовые станции) и подвижные объекты.
Недостатком известного технического решения, принятого за прототип, является то, что связь приемных станций между собой и диспетчерской станцией, осуществляемая посредством сетей Интернет влечет за собой увеличение времени прохождения информации, а иногда и к частичной потере информации как между приемными станциями, так и между приемными и диспетчерской станцией вследствие возникновения коллизий в сетях Интернет, что увеличивает погрешность определения местоположения подвижного объекта. Другим недостатком является то, что в основу системы заложена GPS-навигация, а точность определения координаты в GPS-системе зависит от физических параметров среды распространения сигнала, в частности GPS-приемник может полностью перестать определять свое местоположение при наличии высотных зданий, металлических конструкций, внутри капитального строения. Также необходимо учитывать погрешность, искусственно вносимую в спутниковые сигналы владельцами GPS-навигацией (США) в режиме селективного доступа.
Техническая задача состоит в повышении точности и быстродействия определения местоположения подвижных объектов в режиме реального времени.
Указанный технический результат достигается тем, что в систему определения местоположения подвижных объектов, содержащую искусственные спутники Земли, диспетчерскую станцию, базовые станции, подвижные объекты, введены связанные с искусственными спутниками Земли ГЛОНАСС-приемники, установленные на подвижных объектах и диспетчерской станции, причем на подвижных объектах и базовых станциях установлено телекоммуникационное оборудование сети WiMAX, обеспечивающее соединения базовых станций с подвижными объектами посредством широкополосного радиодоступа, при этом на диспетчерской станции и на каждой базовой станции установлено SDH оборудование, обеспечивающее соединения между базовыми станциями, а также между хотя бы одной базовой станцией и диспетчерской станцией посредством волоконно-оптической линией связи, причем диспетчерская станция установлена стационарно в опорной точке с известными географическими координатами и содержит Геоинформационную систему (ГИС), оборудование для синхронизации по времени навигационного оборудования искусственных спутников Земли с оборудованием сети WiMAX, а также блок обработки информации с программным обеспечением, обеспечивающим совместную работу навигационного оборудования искусственных спутников Земли и сети WiMAX, при этом в качестве искусственных спутников Земли используют глобальную навигационную спутниковую систему ГЛОНАСС.
Предложенное изобретение поясняется при помощи схемы, приведенной на фиг.1.
На фиг.1 приняты следующие обозначения:
- 1-1, 1-2, … 1-n - искусственные спутники Земли глобальной навигационной спутниковой системы ГЛОНАСС;
- 2 - диспетчерская станция, установленная стационарно в опорной точке с известными координатами;
- 3-1, 3-2, … 3-m - базовые станции;
- 4-1, … 4-к - подвижные объекты;
- 5-1, … 5-к - ГЛОНАСС-приемники, установленные на подвижных объектах;
- 6 - ГЛОНАСС-приемник, установленный на диспетчерской станции;
- 7-1, … 7-к - телекоммуникационное абонентское оборудование сети WiMAX, установленное на подвижных объектах;
- 8-1, 8-2, … 8-m - телекоммуникационное оборудование сети WiMAX, установленное на базовых станциях;
- 9 - SDH оборудование, установленное на диспетчерской станции;
- 10-1, 10-2, … 10-m - SDH оборудование, установленное на базовых станциях;
- 11 - Геоинформационная система ГИС;
- 12 - оборудование для синхронизации по времени навигационного оборудования искусственных спутников Земли с оборудованием сети WiMAX;
- 13 - блок обработки информации с программным обеспечением.
Заявляемая система определения местоположения подвижных объектов включает в себя искусственные спутники Земли глобальной навигационной спутниковой системы ГЛОНАСС 1-1, 1-2, … 1-n, диспетчерскую станцию 2, установленную стационарно в опорной точке с известными координатами, базовые станции 3-1, 3-2, … 3-m, подвижные объекты 4-1, … 4-к, ГЛОНАСС-приемники 5-1, … 5-к, установленные на подвижных объектах 4-1, … 4-к, ГЛОНАСС-приемник 6, установленный на диспетчерской станции 2, телекоммуникационное абонентское оборудование сети WiMAX 7-1, … 7-к, установленное на подвижных объектах 4-1, … 4-к, телекоммуникационное оборудование сети WiMAX 8-1, 8-2, … 8-m, установленное на базовых станциях 3-1, 3-2, … 3-m, SDH оборудование 9, установленное на диспетчерской станции 2, SDH оборудование 10-1, 10-2, … 10-m, установленное на базовых станциях 3-1, 3-2, … 3-m, Геоинформационную систему ГИС 11, установленную на диспетчерской станции 2, оборудование 12 для синхронизации по времени навигационного оборудования искусственных спутников Земли с оборудованием сети WiMAX, установленное на диспетчерской станции 2, блок обработки информации 13 с программным обеспечением, обеспечивающим совместную работу навигационного оборудования искусственных спутников Земли глобальной навигационной спутниковой системы ГЛОНАСС 1-1, 1-2, … 1-n и сети WiMAX.
Заявленная система работает следующим образом.
Каждый из ГЛОНАСС-приемников 5-1, … 5-к, установленный на соответствующем подвижном объекте 4-1, … 4-к получает от искусственных спутников Земли глобальной навигационной спутниковой системы ГЛОНАСС 1-1, 1-2, … 1-n, находящихся в зоне покрытия, навигационные радиосигналы и используя известные радиотехнические методы, вычисляет собственные географические координаты. Эти координаты передаются с помощью телекоммуникационного абонентского оборудования сети WiMAX 7-1, … 7-к, установленного на подвижных объектах 4-1, … 4-к на телекоммуникационное оборудование сети WiMAX 8-1, 8-2, … 8-m ближайшей к подвижному объекту из базовых станций 3-1, 3-2, … 3-m посредством широкополосного радиодоступа. Далее полученные координаты передаются с помощью SDH оборудования 10-1, 10-2, 10-m, установленного на базовых станциях на SDH оборудование 9, установленное на диспетчерской станции 2 посредством волоконно-оптической линии связи, а затем на блок обработки информации 13 диспетчерской станции 2 для отображения местоположения подвижного объекта на картах геоинформационной системы ГИС 11.
Одновременно, на ГЛОНАСС-приемник 6, установленный на диспетчерской станции 2 с известными координатами, полученными в результате прецизионной геодезической съемки, поступают навигационные сигналы от спутников ГЛОНАСС 1-1, 1-2 … 1-n, находящихся в зоне покрытия. Блок обработки информации 13 диспетчерской станции 2, используя метод дифференциальных поправок, определяет погрешность измерения координат в каждый момент времени и формирует поправки координат для коррекция координат подвижных объектов 4-1, … 4-к.
Согласно данным Российской системы дифференциальной коррекции и мониторинга (СДКМ) на данный момент ошибки навигационных определений ГЛОНАСС по долготе и широте составляет от 4,00 до 11,00 м (в зависимости от точки приема) при использовании 7-8 спутников. Задача по увеличению точности определения координат решается совместной работой ГЛОНАСС-навигации и сети WiMAX.
Повышение точности определения координат подвижного объекта достигается тем, что погрешность измерений, возникшая при вычислении, корректируется посредством метода триангуляции системой связи сети WiMAX при помощи не менее трех ближайших к объекту базовых станций 3-1, 3-2 … 3-m. Каждая из ближайших к объекту базовых станций 3-1, 3-2 … 3-m измеряет время и скорость прохождения сигнала до каждого из подвижных объектов 4-1, … 4-к посредством телекоммуникационного оборудования сети WiMAX 8-1, 8-2 … 8-m, установленного на базовых станциях 3-1, 3-2 … 3-m и телекоммуникационного оборудования сети WiMAX 7-1, … 7-к на подвижных объектах 4-1, … 4-к. По полученным результатам определяется сферический фронт электромагнитной волны от каждой станции до подвижного объекта и, используя метод наложения сфер, определяется точка пересечения сфер.
Для совместной работы по времени ГЛОНАСС-навигации с сетью WiMAX используют оборудование синхронизации 11, установленное на диспетчерской станции 2, куда с ГЛОНАСС-приемника 6, установленного на диспетчерской станции, поступают со спутников метки точного времени.
Блок обработки информации 13 диспетчерской станции 2, используя Геоинформационную систему ГИС 11, полученные координаты подвижных объектов со спутников, вычисленные дифференциальные поправки координат, данные измерений телекоммуникационного оборудования сети WiMAX, синхронизацию по времени ГЛОНАСС-навигации с сетью WiMAX с помощью программного обеспечения определяет точное место расположения каждого из подвижных объектов 4-1, … 4-к. Вычисленные координаты передаются на подвижные объекты.
При всей совокупности измерений точность определения координат подвижного объекта может составлять до 0,1 м.
Быстродействие определения координат подвижного объекта достигается благодаря совокупности трех составляющих:
- использование технологии SDH, позволяющей работать в режиме реального времени без потери качества;
- использование технологии WiMAX, позволяющей в сетях реализовывать принцип разделения приоритета доступа, при котором за каждым пользователем закрепляется канал связи, что позволяет работать без потери пакетов и в режиме реального времен;
- использование волоконно-оптической линий связи позволяет осуществлять связь между базовыми станциями без прямой видимости с высоким быстродействием и надежностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ С ПОМОЩЬЮ СЕТИ СИНХРОННОЙ ФИКСИРОВАННОЙ СВЯЗИ | 2012 |
|
RU2491575C1 |
| СИСТЕМА ТОЧНОЙ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ ГЛОНАСС | 2015 |
|
RU2582595C1 |
| Система точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС | 2017 |
|
RU2649628C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
| Способ интеграции систем и/или средств обеспечения навигационной и мониторинговой информацией и аппаратно-программный комплекс - центр компетенций | 2017 |
|
RU2654237C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПРИКЛАДНОЙ ПОТРЕБИТЕЛЬСКИЙ ЦЕНТР НАВИГАЦИОННО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ | 2014 |
|
RU2568924C1 |
| ГЕОИНФОРМАЦИОННАЯ СИСТЕМА В ФОРМАТЕ 4D | 2017 |
|
RU2667793C1 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |
Изобретение относиться к технике связи и может использоваться для определения местоположения подвижных объектов в режиме реального времени. Техническим результатом является повышение точности и быстродействий определения местоположения подвижных объектов. Технический результат достигается совместной работой глобальной навигационной спутниковой системы ГЛОНАСС и сети WiMAX. На подвижных объектах и диспетчерской станции устанавливают ГЛОНАСС-приемники, обеспечивающие связь со спутниками. Соединения между базовыми станциями и подвижными объектами обеспечивают посредством широкополосного радиодоступа, используя установленное телекоммуникационное оборудование сети WiMAX. Соединения между диспетчерской станцией и базовыми станциями осуществляют посредством SDH оборудования и оптической линией связи. Блок обработки информации диспетчерской станции с помощью программного обеспечения, используя Геоинформационную систему (ГИС), полученные координаты подвижных объектов со спутников, вычисленные дифференциальные поправки координат, синхронизацию времени ГЛОНАСС с оборудованием сети WiMAX определяет точное местоположение подвижного объекта в режиме реального времени. 1 ил.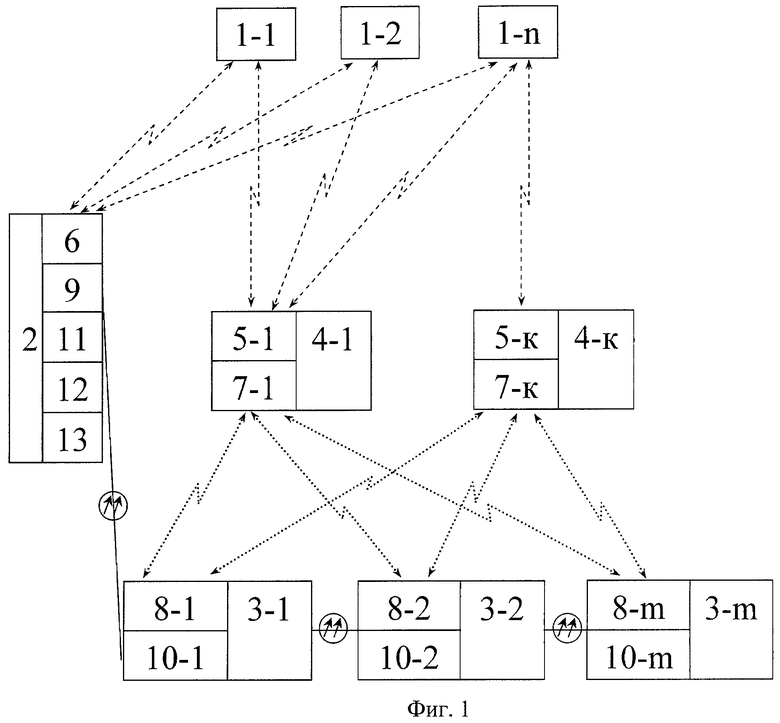
Система определения местоположения подвижных объектов, содержащая искусственные спутники Земли, диспетчерскую станцию, базовые станции, подвижные объекты, отличающаяся тем, что в нее введены связанные с искусственными спутниками Земли ГЛОНАСС-приемники, установленные на подвижных объектах и диспетчерской станции, причем на подвижных объектах и базовых станциях установлено телекоммуникационное оборудование сети WiMAX, обеспечивающее соединения базовых станций с подвижными объектами посредством широкополосного радиодоступа, при этом на диспетчерской станции и на каждой базовой станции установлено SDH оборудование, обеспечивающее соединения между базовыми станциями, а также между хотя бы одной базовой станцией и диспетчерской станцией посредством волоконно-оптической линии связи, причем диспетчерская станция установлена стационарно в опорной точке с известными географическими координатами и содержит Геоинформационную систему (ГИС), оборудование для синхронизации по времени навигационного оборудования искусственных спутников Земли с оборудованием сети WiMAX, а также блок обработки информации с программным обеспечением, обеспечивающим совместную работу навигационного оборудования искусственных спутников Земли и сети WiMAX, при этом в качестве искусственных спутников Земли используют глобальную навигационную спутниковую систему ГЛОНАСС.
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ПАРАМЕТРОВ СОСТОЯНИЯ ОБЪЕКТОВ | 2007 |
|
RU2340004C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ И СЛЕЖЕНИЯ ЗА УДАЛЕННЫМИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2290763C1 |
| Приспособление для подачи жидкого тяжелого топлива в двигатели внутреннего горения | 1929 |
|
SU23030A1 |
| ЕР 2001194 A2, 10.12.2008 | |||
| Соединение сваркою котельных листов и связей при разнородном материале их | 1927 |
|
SU12647A1 |

