Предложенное изобретение относится к технике связи и может использоваться для определения местоположения подвижных объектов.
Известна система и способ определения местоположения мобильного абонента сотовой сети связи (патент на изобретение BY №12647, кл. МПК (2006) G01S 3/02), включающая мобильного абонента, базовые станции сотовой сети связи, центральный коммутатор, геоинформационную систему, подсистему синхронизации процессов посредством спутниковой системы. В данной системе местоположение абонентских устройств определяют по координатам базовых станций в зоне действия которых находится абонентское устройство с учетом пространственной конфигурации диаграмм направленности антенн этих базовых станций и уровня мощности принимаемых этими базовыми станциями сигналов от абонентского устройства.
Данная система не дает достаточно точного позиционирования объекта, а лишь определяет зону, в котором находится объект. При этом точность системы зависит от конфигурации местности, погодных условий, что не позволяет ей работать в режиме реального времени.
Известна система выбора навигационного решения, используемого при установлении местоположения устройства в системе беспроводной связи (патент на изобретение RU №2362213, кл. МПК (2006) G08G 1/123), включающая первый набор данных о местоположении удаленного устройства на основе сетевых измерений, второй набор данных о местоположении удаленного устройства на основе измерения спутниковой глобальной системы позиционирования и выбор между первым и вторым набором данных.
Недостатком данного технического решения является существующая погрешность каждого измерения и относительность оценки выбора, что не позволяет осуществить точное позиционирование объекта.
Известна система определения местоположения подвижных объектов (патент на полезную модель RU №23030, кл. МПК Н04В 7/26, G01S 5/00), включающая искусственные спутники Земли, диспетчерскую станцию, приемные станции (базовые станции) и подвижные объекты.
Недостатком известного технического решения является то, что связь приемных станций между собой и диспетчерской станцией осуществляемая посредством сетей Интернет, влечет за собой увеличение времени прохождения информации, а иногда и к частичной потере информации как между приемными станциями, так и между приемными и диспетчерской станцией вследствие возникновения коллизий в сетях Интернет, что увеличивает погрешность определения местоположения подвижного объекта.
Общим недостатком представленных аналогов является резкое увеличение погрешности в вычислениях местоположения подвижных объектов при увеличении скорости движения подвижных объектов.
Наиболее близкой системой того же назначения к заявленной по совокупности признаков, является система определения местоположения подвижных объектов в режиме реального времени (патент на изобретение RU №2444705, кл. МПК G01C 21/24), содержащая искусственные спутники Земли глобальной навигационной спутниковой системы, установленную стационарно в опорной точке с известными географическими координатами и содержащую Геоинформационную систему (ГИС) диспетчерскую станцию, базовые станции, подвижные объекты, установленные на подвижных объектах и диспетчерской станции связанные с искусственными спутниками Земли приемники сигналов навигационной спутниковой системы, волоконно-оптическую линию связи, обеспечивающую соединения между базовыми станциями, а также между хотя бы одной базовой станцией и диспетчерской станцией.
Недостатком данного технического решения является узость использования данной системы, так как для ее реализации требуются сети WIMAX. Также нет объяснения, по какому признаку базовые станции опознаются диспетчерской станцией.
Технической задачей изобретения является создание универсальной системы определения местоположения подвижного объекта на основе совокупности любой навигационной системы искусственных спутников земли с любой системой широкополосного радиодоступа (ШПРД), например WiFi, WCDMA, HSDPA, HSPA+, LTE, и сетью синхронной фиксированной связи, а также уточнение процесса вычисления координат подвижного объекта базовыми станциями.
Технический результат состоит в повышении точности определения местоположения подвижных объектов в режиме реального времени и увеличении функциональных возможностей системы.
Указанный технический результат достигается тем, что в систему определения местоположения подвижных объектов, содержащую искусственные спутники Земли глобальной навигационной спутниковой системы, установленную стационарно в опорной точке с известными географическими координатами и содержащую Геоинформационную систему (ГИС) диспетчерскую станцию, базовые станции, подвижные объекты, установленные на подвижных объектах и диспетчерской станции и связанные с искусственными спутниками Земли приемники сигналов навигационной спутниковой системы, волоконно-оптическую линию связи, обеспечивающую соединения между базовыми станциями, а также между хотя бы одной базовой станцией и диспетчерской станцией, введено на подвижных объектах и базовых станциях телекоммуникационное оборудование широкополосного радиодоступа, осуществляющее соединение между подвижными объектами и базовыми станциями посредством широкополосной радиосвязи, кроме того на диспетчерской станции установлено оборудование для синхронизации по времени навигационного оборудования искусственных спутников Земли с телекоммуникационным оборудованием широкополосного радиодоступа и установлен блок обработки информации с программным обеспечением, осуществляющим совместную работу навигационного оборудования искусственных спутников Земли и телекоммуникационного оборудования широкополосного радиодоступа, также на диспетчерской станции и каждой из базовых станций установлено оборудование сети синхронной фиксированной связи для работы по волоконно-оптическим линиям связи, при этом каждая из базовых станций установлена стационарно в опорных точках с известными координатами и имеет свой идентификационный номер. При этом идентификационным номером каждой базовой станции является IP-адрес базовой станции. При этом оборудование сети синхронной фиксированной связи представляет собой оборудование технологии синхронной цифровой иерархии SDH (Synchronous Digital Hierarchy), или оборудование технологии оптической транспортной сети OTN (Optical Transport Network), или любое другое аналогичное оборудование.
Предложенное изобретение поясняется при помощи схемы, приведенной на фигуре 1.
На фиг.1 приняты следующие обозначения:
- 1-N - искусственные спутники Земли глобальной навигационной спутниковой системы, (где N=1, 2, 3, …);
- 2 - диспетчерская станция;
- 3-М - базовые станции, (где М=1, 2, 3, …);
- 4-К - подвижные объекты, (где К=1, 2, 3, …);
- 5-К - приемники сигналов навигационной спутниковой системы, установленные на подвижных объектах;
- 6 - приемник сигналов навигационной спутниковой системы, установленный на диспетчерской станции;
- 7-К - телекоммуникационное абонентское оборудование ШПРД, установленное на подвижных объектах;
- 8-М - телекоммуникционное оборудование сети ШПРД, установленное на базовых станциях;
- 9 - оборудование сети синхронной фиксированной связи, установленное на диспетчерской станции;
- 10-М - оборудование сети синхронной фиксированной связи, установленное на базовых станциях;
- 11 - Геоинформационная система ГИС;
- 12 - оборудование для синхронизации по времени навигационного оборудования искусственных спутников Земли с оборудованием сети ШПРД;
- 13 - блок обработки информации с программным обеспечением.
Заявляемая система определения местоположения подвижных объектов включает в себя искусственные спутники Земли глобальной навигационной спутниковой системы 1-N, установленную стационарно в опорной точке с известными географическими координатами диспетчерскую станцию 2, базовые станции 3-М, подвижные объекты 4-К, установленные на подвижных объектах 4-К и связанные с искусственными спутниками Земли 1-N приемники сигналов 5-К навигационной спутниковой системы, установленный на диспетчерской станции 2 и связанный с искусственными спутниками Земли 1-N приемник сигналов 6 навигационной спутниковой системы, установленное на подвижных объектах 4-К телекоммуникационное абонентское оборудование широкополосного радиодоступа 7-К, установленное на базовых станциях 3-М телекоммуникационное оборудование широкополосного радиодоступа 8-М, осуществляющее соединение между подвижными объектами и базовыми станциями посредством широкополосной радиосвязи, кроме того, на диспетчерской станции 2 установлены Геоинформационная система (ГИС) 11 и оборудование для синхронизации по времени 12 навигационного оборудования искусственных спутников Земли 1-N с телекоммуникационным оборудованием широкополосного радиодоступа подвижных объектов и базовых станций, а также установлен блок обработки информации 13 с программным обеспечением, обеспечивающим совместную работу навигационного оборудования искусственных спутников Земли 1-N и телекоммуникационного оборудования широкополосного радиодоступа, также на диспетчерской станции 2 установлено оборудование сети синхронной фиксированной связи 9, а на каждой из базовых станций 3-М оборудование сети синхронной фиксированной связи 10-М, обеспечивающее соединение между базовыми станциями, а также между хотя бы одной базовой станцией и диспетчерской станцией посредством волоконно-оптической линией связи, при этом каждая из базовых станций 3-М установлена стационарно в опорных точках с известными координатами и имеет свой идентификационный номер. При этом идентификация каждой из базовых станций 3-М диспетчерской станцией 2 осуществляется по IP-адресу базовой станции. При этом оборудование сети синхронной фиксированной связи представляет собой оборудование технологии синхронной цифровой иерархии SDH, или оборудование технологии оптической транспортной сети OTN, или любое другое аналогичное оборудование.
Заявленная система работает следующим образом.
Каждый из приемников сигналов 5-К навигационной спутниковой системы, установленный на соответствующем подвижном объекте 4-К и находящейся в зоне покрытия спутников 1-N, получает от искусственных спутников Земли 1-N глобальной навигационной спутниковой системы навигационные радиосигналы и, используя известные радиотехнические методы, вычисляет собственные географические координаты. Эти координаты передаются с помощью телекоммуникационного абонентского оборудования сети ШПРД 7-К, установленного на подвижных объектах 4-К на телекоммуникационное оборудование сети ШПРД 8-М ближайшей к подвижному объекту из базовых станций 3-М посредством широкополосного радиодоступа. Далее полученные координаты передаются с помощью оборудования сети синхронной фиксированной связи 10-М, установленного на базовых станциях на приемное оборудование сети синхронной фиксированной связи 9, установленное на диспетчерской станции 2 посредством волоконно-оптической линии связи, а затем на блок обработки информации 13 диспетчерской станции 2 для отображения местоположения подвижного объекта на картах геоинформационной системы ГИС 11. Идентификация диспетчерской станцией базовой станции, с которой пришло сообщение, производиться по IP-адресу базовой станции.
Одновременно, на приемник сигналов 6 навигационной спутниковой системы, установленный на диспетчерской станции 2 с известными координатами, полученными в результате прецизионной геодезической съемки, поступают навигационные сигналы от искуственных спутников земли 1-N. Блок обработки информации 13 диспетчерской станции 2, используя метод дифференциальных поправок, определяет погрешность измерения координат в каждый момент времени и формирует поправки координат для коррекции координат подвижных объектов 4-К.
Согласно данным Российской системы дифференциальной коррекции и мониторинга (СДКМ) (www.sdcm.ru) на данный момент ошибки навигационных определений составляют: системы ГЛОНАСС по долготе и широте составляет от 4,00 до 7,00 м (в зависимости от точки приема) при использовании 8-9 спутников; системы GPS по долготе и широте от 1,40 до 4,00 м (в районе Менделеево ошибка составляет от 24 км до 30 км) при использовании 10-11 спутников. Задача по увеличению точности определения координат решается совместной работой навигационной спутниковой системы, сетью широкополосного радиодоступа и сетью синхронной фиксированой связи.
Повышение точности определения координат подвижного объекта достигается тем, что погрешность измерений, возникающая при вычислении корректируется посредством метода триангуляции сети ШПРД при помощи не менее трех ближайших к объекту базовых станций 3-М. Ближайшие к объекту базовые станции 3-М измеряют время и скорость прохождения сигнала до каждого из подвижных объектов 4-К посредством телекоммуникационного оборудования сети ШПРД 8-М, установленного на базовых станциях 3-М и телекоммуникационного абонентского оборудования ШПРД 7-К на подвижных объектах 4-К. Полученные результаты со своим PIN-кодом станции передают на диспетчерскую станцию 2, где в блоке обработки информации 13 определяется сферический фронт электромагнитной волны от каждой из ближайших станций до подвижного объекта и используя метод наложения сфер определяется точка пересечения сфер. Зная координаты точного позиционирования базовых станций определяются координаты пересечения сфер.
Для обеспечения требуемой точности необходима синхронизация внутренних часов сети ШПРД с часами искусственных спутников земли. Для этого используют оборудование синхронизации 12, установленное на диспетчерской станции 2, куда на приемник сигналов 6 навигационной спутниковой системы поступают со спутников метки точного времени.
Блок обработки информации 13 диспетчерской станции 2, используя Геоинформационную систему (ГИС) 11, полученные координаты подвижных объектов со спутников, вычисленные дифференциальные поправки координат, данные измерений телекоммуникационного оборудования сети ШПРД, синхронизацию по времени спутников с сетью ШПРД с помощью программного обеспечения определяет точное место расположения каждого из подвижных объектов 4-К. Вычисленные координаты передаются на подвижные объекты.
При всей совокупности измерений точность определения координат подвижного объекта может составлять до 0,1 м.
Быстродействие определения координат подвижного объекта, а также неизменность точности измерения при увеличении сокрости передвижения подвижного объекта достигается благодаря совокупности использования оборудования сети синхронной фиксированной связи, позволяющей работать в режиме реального времени без потери качества, и использования волоконно-оптической линий связи, позволяющей осуществлять связь между базовыми станциями без прямой видимости с высоким быстродействием и надежностью.
Функциональные возможности предложенной системы в отличие от прототипа увеличиваются за счет ее универсальности, так как оборудование сети синхронной фиксированной связи может представлять собой оборудование технологии синхронной цифровой иерархии SDH или оборудование технологии оптической транспортной сети OTN, или любое другое аналогичное оборудование, а оборудование ШПРД может представлять собой любую технологию широкополосного доступа (например, 4G, WiMax, LTE и т.д.), что позволяет использовать данное изобретение как в уже построенных системах связи с перечисленными выше технологиями, так и выстраивать новые системы, используя широкий спектр возможных технологий.
Изобретение относится к технике связи и может использоваться для определения местоположения подвижных объектов. Технический результат состоит в повышении точности определения местоположения подвижных объектов в режиме реального времени и увеличении функциональных возможностей системы. Для этого на подвижных объектах и диспетчерской станции устанавливают приемники сигналов навигационной спутниковой системы, обеспечивающие связь со спутниками. Соединения между базовыми станциями и подвижными объектами обеспечивают посредством оборудования широкополосного радиодоступа. Соединения между диспетчерской станцией и базовыми станциями осуществляют посредством оборудования синхронной фиксированной связи и оптической линией связи. Блок обработки информации диспетчерской станции с помощью программного обеспечения, используя Геоинформационную систему (ГИС), полученные координаты подвижных объектов со спутников, вычисленные дифференциальные поправки координат, данные измерений телекоммуникационного оборудования сети ШПРД, синхронизацию времени навигационной спутниковой системы с оборудованием сети широкополосного радиодоступа, определяет точное местоположение подвижного объекта в режиме реального времени. 2 з.п. ф-лы, 1 ил.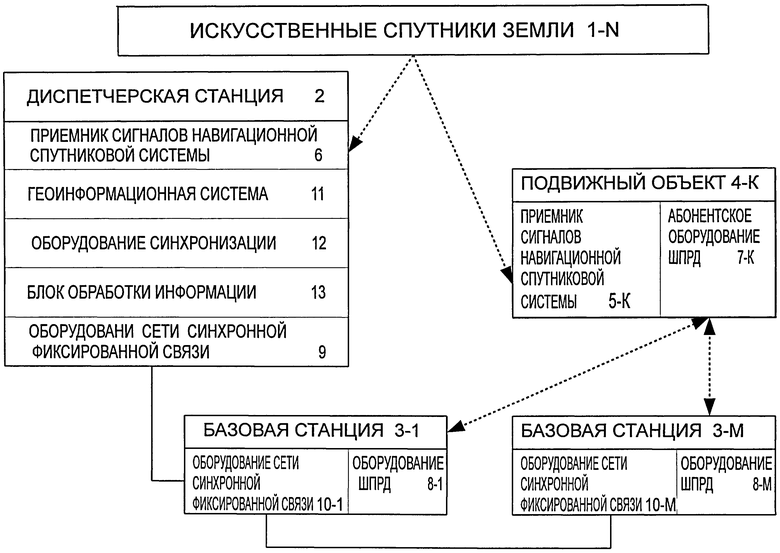
1. Система определения местоположения подвижных объектов в режиме реального времени с помощью сети синхронной фиксированной связи, содержащая искусственные спутники Земли глобальной навигационной спутниковой системы, установленную стационарно в опорной точке с известными географическими координатами и содержащую Геоинформационную систему (ГИС) диспетчерскую станцию, базовые станции, подвижные объекты, установленные на подвижных объектах и диспетчерской станции и связанные с искусственными спутниками Земли приемники сигналов навигационной спутниковой системы, волоконно-оптическую линию связи, обеспечивающую соединения между базовыми станциями, а также между хотя бы одной базовой станцией и диспетчерской станцией, отличающаяся тем, что каждая из базовых станций установлена стационарно в опорных точках с известными координатами и имеет свой идентификационный номер, на подвижных объектах и базовых станциях установлено телекоммуникационное оборудование широкополосного радиодоступа, осуществляющее соединение между подвижными объектами и базовыми станциями посредством широкополосной радиосвязи, кроме того, на диспетчерской станции установлено оборудование для синхронизации по времени навигационного оборудования искусственных спутников Земли с телекоммуникационным оборудованием широкополосного радиодоступа и установлен блок обработки информации с программным обеспечением, обеспечивающим совместную работу навигационного оборудования искусственных спутников Земли и телекоммуникационного оборудования широкополосного радиодоступа, также на диспетчерской станции и каждой из базовых станций установлено оборудование сети синхронной фиксированной связи для работы по волоконно-оптическим линиям связи.
2. Система определения местоположения подвижных объектов в режиме реального времени с помощью сети синхронной фиксированной связи по п.1, отличающаяся тем, что идентификационным номером каждой базовой станции является IP-адрес базовой станции.
3. Система определения местоположения подвижных объектов в режиме реального времени с помощью сети синхронной фиксированной связи по п.1, отличающаяся тем, что оборудование сети синхронной фиксированной связи представляет собой оборудование технологии синхронной цифровой иерархии SDH, или оборудование технологии оптической транспортной сети OTN, или любое другое аналогичное оборудование.
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2010 |
|
RU2444705C1 |
| "WiMAX", 21.06.2006, 7 с | |||
| Интернет: <URL: http://www.ru.wikipedia.org/wiki/WiMAX/ | |||
| Синхронная цифровая иерархия "SDH", 09.08.2002, 5 с | |||
| Интернет: <URL: http://www.://archive.org/index.php/ | |||
| Обзор НетМонитора-CellTrack, 22.10.2007, 7 с | |||
| Интернет: <URL: | |||

