Область техники
Изобретение относится к способу и системе управления скоростью транспортного средства. В частности, настоящее изобретение относится к способу и системе управления торможением транспортного средства.
Уровень техники
В настоящее время транспортные средства, такие как легковые автомобили и тяжелая техника, включая грузовики и автобусы, оснащаются все большим количеством сложных средств, помогающих вождению. Например, при помощи современных систем определения местонахождения, таких как GPS (Глобальная Система Определения Местонахождения), в сочетании с картами с указанием ограничений скорости для различных участков дороги, можно помочь водителю выбрать верную скорость.
Для того чтобы иметь возможность выбора верной скорости, необходимо, чтобы транспортное средство могло совершать ускорения и торможения, когда меняется предел скорости, а также по другим причинам. Если требуется снизить скорость из-за понижения предела скорости, то автомобиль должен тормозить. В принципе торможение можно также начать в любой момент времени в целях минимизации расхода топлива. Но такой способ управления скоростью способен, несмотря на рациональный расход топлива, создать другие проблемы на дороге. К таким другим проблемам относится, например, раздражение водителей других автомобилей, которые едут по дороге вслед за тормозящей машиной. Кроме того, водитель, управляющий автомобилем, оснащенным системой управления скоростью, которая будет осуществлять торможение там, где оно интуитивно не требуется, вероятно, отключит ее, полностью взяв управление на себя, если почувствует, что система создает больше проблем, чем помогает решить.
Поэтому есть необходимость в способе и системе, способных обеспечить управление скоростью, которое окажет помощь в экономии топлива и в то же время будет интуитивно-понятным как для водителя транспортного средства с автоматизированным управлением, так и для водителей машин из окружающего транспортного потока.
Краткое описание изобретения
Задачей настоящего изобретения является создание способа и системы, способных обеспечить интуитивно-понятное управление скоростью транспортного средства.
Другая задача настоящего изобретения заключается в создании способа и системы, способных обеспечить торможение транспортного средства с одновременным обеспечением рационального расхода топлива, воспринимаемое как корректное с точки зрения окружающего потока машин и самого водителя.
Эти и другие задачи решаются посредством создания способа, системы и компьютерного программного продукта согласно прилагаемой формуле изобретения. Так, чтобы получить способ автоматизированного управления скоростью автомобиля, способный обеспечить торможение, которое (нормально) воспринимается водителями автомобиля и окружающего потока машин, скорость снижается в зависимости от необходимости ее снижения, такой как ограничение скорости на дороге, предстоящий поворот или возникновение препятствий для обзора, с учетом дорожных условий на пути между текущим положением машины и положением, где потребуется соблюдать более низкую скорость, а также с учетом расстояния до точки начала торможения. Это гарантирует то, что торможение не начнется слишком рано и водитель и окружающий поток не воспримут его как интуитивно-непонятное действие. Кроме того, пускай даже расход топлива нельзя будет оптимизировать полностью, но благодаря недопущению торможения на слишком большом расстоянии от участка дороги, где требуется пониженная скорость, улучшатся другие параметры, такие как средняя скорость.
В соответствии с одним из вариантов воплощения изобретения торможение допускается на расстоянии от участка дороги с пониженной скоростью, которое соответствует расстоянию, требуемому для движения автомобиля накатом по ровной (горизонтальной) дороге, при котором автомобиль замедлился бы до пониженной скорости, перед тем как достигнет участка дороги с пониженным пределом скорости, либо соответствует расстоянию, некоторым образом связанному с таким расстоянием. Следует отметить, что это является тем расстоянием, которое воспринимается водителями как интуитивно-верное. В качестве другого возможного или вспомогательного расстояния может использоваться фиксированное расстояние и/или расстояние, связанное с текущим и/или предстоящим ограничением скорости. Могут использоваться и другие интуитивно-верные расстояния, при условии, что они не допускают торможения на расстоянии, которое воспринималось бы водителем автомобиля или водителями из окружающего транспортного потока как неоправданное и/или необъяснимое.
Изобретение относится также к системе и компьютерному программному продукту, разработанным для реализации описанного способа управления скоростью.
Применение описанных здесь способа и системы может обеспечить систему управления скоростью, лучше отвечающую современным принципам вождения, одновременно реализуя преимущество автоматизированных вспомогательных средств вождения, которое состоит в оптимизации расхода топлива и других параметров, связанных с работой двигателя.
Краткое описание чертежей
Далее настоящее изобретение будет описано более подробно, при помощи неограничивающих примеров его реализации со ссылкой на прилагаемые чертежи, на которых
Фиг.1 - общий вид системы управления для транспортного средства.
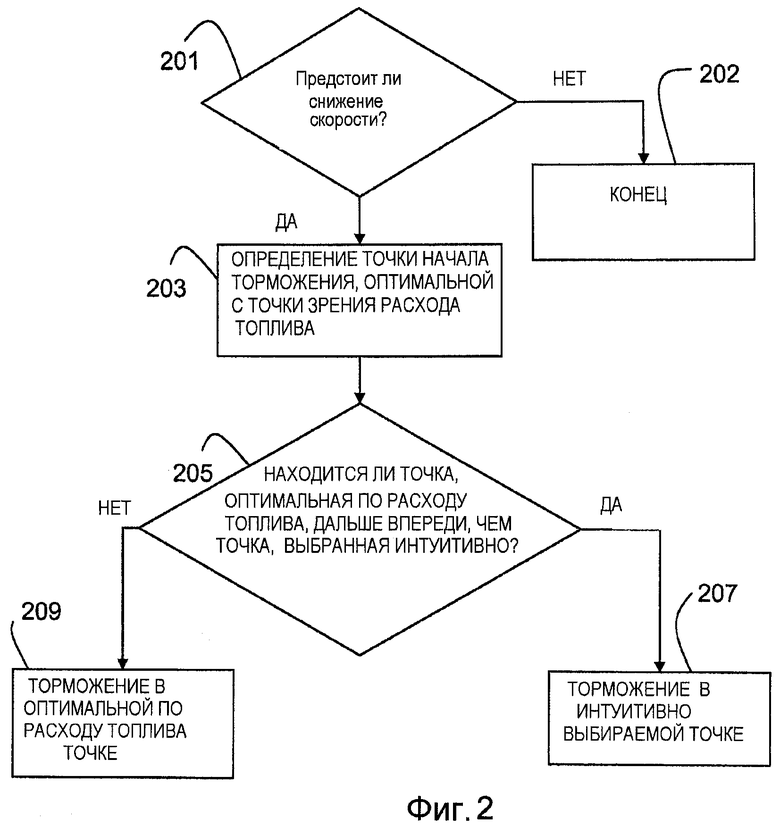
Фиг.2 - принципиальная схема этапов, осуществляемых при управлении скоростью транспортного средства в процессе торможения.
Подробное описание изобретения
На Фиг.1 показана система 100 управления для транспортного средства. Система 100 управления содержит, по меньшей мере, один блок 101 управления, например, электронный блок управления (ЭБУ). Блок 101 управления выполнен с возможностью приема сигналов от сенсоров, имеющихся в различных частях транспортного средства, таких как двигатель 103, включая данные о частоте вращения, и другие сигналы, связанные с работой двигателя. Кроме того, блок 101 управления может быть соединен с запоминающим устройством 105 и получать от него данные, касающиеся местоположения транспортного средства, полученные от системы определения местоположения, подобной GPS (Глобальной Системе Определения Местонахождения). Блок 101 управления может также принимать картографические данные 107 от цифровой (электронной) карты. Картографические данные преимущественно касаются различных значений скоростей, которые следует соблюдать на различных участках дорог. Например, картографические данные могут содержать допустимые скорости на различных участках дорог с учетом таких параметров, как ограничение скорости на поворотах и участках с препятствиями для обзора (с ограниченной видимостью).
Управление различными частями и компонентами транспортного средства осуществляется при помощи запрограммированных команд (инструкций), которые хранятся в блоке управления. Запрограммированные инструкции обычно хранятся в виде компьютерного программного продукта 110 в цифровом запоминающем устройстве 109, таком как ОЗУ, флэш-память, СППЗУ, ЭСППЗУ или ПЗУ, причем программа выполняется блоком управления. Посредством изменения запрограммированных инструкций транспортное средство может в отдельных случаях вести себя по-разному.
Было замечено, что если во время управления скоростью транспортного средства посредством заранее заданного алгоритма автоматизированного управления торможение начинается слишком рано, то могут возникать проблемы. Такие проблемы связаны, по меньшей мере частично, с тем фактом, что если торможение воспринимается водителем автомобиля, оснащенного системой автоматизированного управления скоростью, как необоснованное, то водитель может отключить систему управления, либо оно может вызывать раздражение водителей других транспортных средств, вследствие того, что торможение воспринимается ими как необоснованное.
В соответствии с настоящим изобретением, система, изображенная на Фиг.1, применяется, например при помощи программирования компьютерного продукта 110, для того, чтобы инициировать торможение ввиду предстоящего понижения предельной скорости, только если расстояние до места понижения предела меньше или равно заранее заданному расстоянию.
Позволяя системе управления скоростью инициировать торможение, приводимое в действие в случае предстоящего понижения предела скорости, только если транспортное средство находится не далее чем на заранее заданном расстоянии от участка дороги со сниженным пределом скорости, водитель транспортного средства, оснащенного системой контроля скорости, будет воспринимать торможение как оправданное и сочтет, что система управления скоростью действует верно. Если расстояние выбрано слишком далеким от участка дороги, где следует соблюдать пониженную скорость, торможение не будет восприниматься как интуитивно-понятное, и водитель может решить, что система работает неправильно, и отключить систему. Также, если торможение воспринимается как необоснованное водителями машин из окружающего потока, это может вызвать их раздражение.
С другой стороны, если торможение приводится в действие на очень позднем этапе, это может стать причиной лишнего расхода топлива из-за слишком быстрого торможения транспортного средства. Другими словами, необходимо, чтобы торможение инициировалось как можно раньше, при условии, что оно не воспринимается человеком как интуитивно-непонятное.
Было замечено, что человек способен вовремя переходить к движению автомобиля накатом для снижения скорости ввиду предстоящего ограничения скорости, если автомобиль движется по ровной (горизонтальной) дороге. Однако на подъеме или спуске человек обычно не способен вовремя, в нужном месте перейти к движению накатом ввиду предстоящего участка дороги с пониженной скоростью. Одна из причин этой неспособности состоит в том, что человеку приходится учитывать слишком много параметров, чтобы оценить, когда следует переходить к езде накатом (с выключенным двигателем).
В соответствии с одним из вариантов воплощений настоящего изобретения максимальное расстояние от предстоящего участка дороги с пониженной скоростью, когда система управления скоростью может инициировать торможение, устанавливается равным соответствующему расстоянию в случае, если бы дорога была ровной.
На Фиг.2 показана принципиальная схема этапов способа, осуществляемых при управлении скоростью транспортного средства. Во-первых, на этапе 201 проверяется, предстоит ли впереди участок дороги с пониженной скоростью, например ввиду снижения предела скорости, ограничения на повороте или препятствий обзору. Если на этапе 201 определяется, что впереди приближается участок дороги с пониженной скоростью, происходит переход к этапу 203, в противном случае процедура заканчивается (этап 202).
На этапе 203 определяется точка начала торможения, наилучшая в смысле эффективности расхода топлива. На следующем этапе 205 определяется самая ранняя точка, в которой может быть начато торможение. Самая ранняя точка может определяться любым способом, подходящим для определения интуитивно-верной точки. Она может находиться на фиксированном расстоянии, допустим 300 м, либо на расстоянии, выбранном в зависимости от текущего и предстоящего, более низкого, пределов скорости или сходным образом.
В частности, данная точка может определяться как соответствующая точке, где следовало бы перейти к движению с выключенным двигателем, если бы на пути от настоящего местоположения транспортного средства до места, где следует соблюдать пониженную скорость, или от местоположения, некоторым образом связанного с этим расстоянием, дорога была ровной. Интуитивно-верная точка может также определяться на основе комбинации из более чем одного вычисленного расстояния. Например, интуитивно-верная точка может определяться как ближайшая из двух: точки на фиксированном расстоянии, допустим 800 м, и точки, соответствующей переходу к движению с выключенным двигателем по ровной дороге.
Далее, самая ранняя допустимая точка из тех, которые можно назвать интуитивно-верными, может использоваться как заведомое (необходимое) условие начала торможения. Другими словами, торможение нельзя начинать, пока не выполнено условие, определяемое на этапе 205. Если точка, определяемая на этапе 203, достигается транспортным средством раньше точки, определяемой на этапе 205, торможение откладывается, пока автомобиль не достигнет точки, определенной на этапе 205 (этап 207). Если точка, определяемая на этапе 203, не достигается транспортным средством раньше точки, определяемой на этапе 205, торможение инициируется в точке, определяемой на этапе 203 (этап 209).
Применение описанных здесь способа и системы может обеспечить улучшенное управление скоростью транспортного средства. Данные способ и система могут обеспечить управление скоростью, соответствующее современным принципам вождения, которое в то же время позволяет эффективно расходовать топливо.
Изобретение относится к способу автоматизированного управления скоростью транспортного средства. Скорость транспортного средства снижается в ответ на ожидающееся снижение скорости. Торможение транспортного средства, содержащего устройство (101) определения первой точки начала торможения и переноса первой точки в третью точку начала торможения, включает этап определения первой точки начала торможения в зависимости от условий на дороге между текущей точкой нахождения транспортного средства и второй точкой впереди, где скорость должна быть ниже, этап переноса первой точки, где инициируется торможение в третью точку, ближе ко второй точке, если первая точка находится от второй точки дальше, чем на заданном расстоянии. Изобретение позволяет предотвратить раннее торможение, оптимизировать расход топлива. 2 н. и 10 з.п. ф-лы, 2 ил.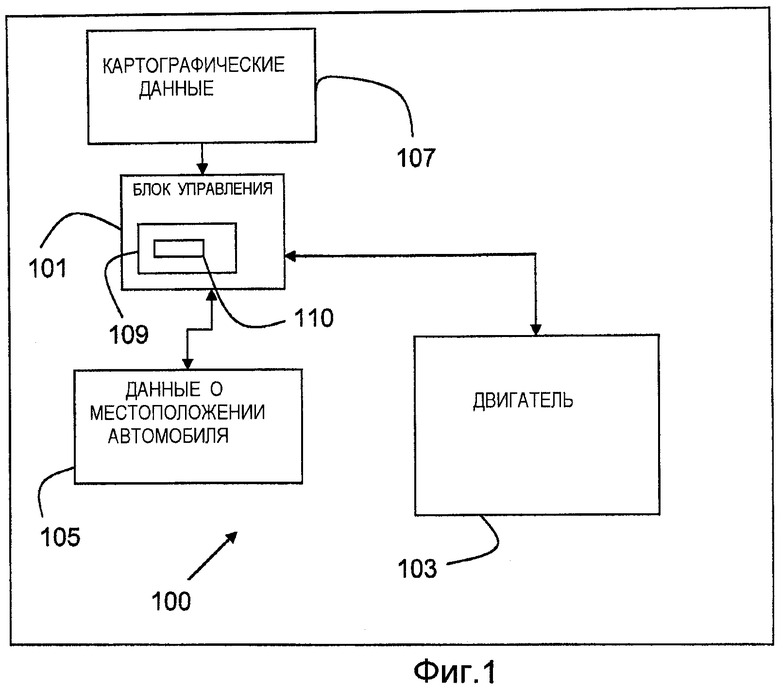
1. Способ автоматизированного управления скоростью транспортного средства в процессе торможения, когда скорость снижается в ответ на ожидающееся снижение скорости; при этом способ включает этап (203) определения первой точки начала торможения в зависимости от условий на дороге между текущей точкой нахождения транспортного средства и второй точкой впереди, где скорость должна быть ниже, отличающийся тем, что включает этап (207) переноса первой точки, где инициируется торможение, в третью точку, ближе ко второй точке, если первая точка находится от второй точки дальше, чем на заданном расстоянии.
2. Способ по п.1, отличающийся тем, что третья точка является точкой, соответствующей точке, где выключение двигателя транспортного средства на ровной дороге привело бы к замедлению транспортного средства до сниженной скорости перед достижением второй точки.
3. Способ по п.1 или 2, отличающийся тем, что третья точка является точкой, которая находится на фиксированном расстоянии от второй точки.
4. Способ по п.1, отличающийся тем, что третья точка является точкой, которая находится на расстоянии, зависящем от текущего ограничения скорости транспортного средства.
5. Способ по п.1, отличающийся тем, что третья точка является точкой, которая находится на расстоянии, зависящем от предстоящего снижения предела скорости.
6. Способ по п.1, отличающийся тем, что скорость понижается ввиду снижения предела скорости, поворота дороги или препятствий для обзора.
7. Система (100) автоматизированного управления скоростью транспортного средства в процессе торможения, содержащая устройство (101) для определения первой точки начала торможения в зависимости от условий на дороге между текущей точкой нахождения транспортного средства и второй точкой впереди, где скорость должна быть ниже, отличающаяся тем, что содержит устройство (101) для переноса первой точки, где начинается торможение, в третью точку, ближе ко второй точке, если первая точка находится от второй точки дальше, чем на заданном расстоянии.
8. Система по п.7, отличающаяся тем, что содержит устройство для определения третьей точки как места, соответствующего точке, где выключение двигателя транспортного средства на ровной дороге привело бы к замедлению транспортного средства до сниженной скорости перед достижением второй точки.
9. Система по п.7 или 8, отличающаяся тем, что содержит устройство для определения того, что третья точка является точкой, которая находится на фиксированном расстоянии от второй точки.
10. Система по п.7, отличающаяся тем, что содержит устройство для определения того, что третья точка является точкой, которая находится на расстоянии, зависящем от текущего ограничения скорости транспортного средства.
11. Система по п.7, отличающаяся тем, что содержит устройство для определения того, что третья точка является точкой, которая находится на расстоянии, зависящем от предстоящего снижения предела скорости.
12. Система по п.7, отличающаяся тем, что скорость понижается ввиду снижения предела скорости, поворота дороги или препятствий для обзора.
| JP 2007221889 А, 30.08.2007 | |||
| Устройство для подачи приточного воздуха | 1983 |
|
SU1096457A1 |
| Устройство для оценки работы операторов | 1987 |
|
SU1481837A1 |
| DE 4110345 А, 01.10.1992 | |||
| Устройство для управления скоростью движения транспортного средства | 1975 |
|
SU552226A1 |

