Область техники, к которой относится изобретение
Настоящее изобретение относится к способу определения характеристик ускорения с оптимальным расходом топлива, как определено в ограничительной части п.1.
Настоящее изобретение также относится к способу автоматизированного регулирования скорости, как определено в ограничительной части п.12.
Настоящее изобретение также относится к блоку управления, предназначенному для определения характеристик ускорения с оптимальным расходом топлива, как определено в ограничительной части п.13.
Настоящее изобретение также относится к системе для автоматизированного регулирования скорости, как определено в ограничительной части п.19.
Уровень техники
Для точного управления скоростью автотранспортного средства, такого как автотранспортное средство, грузовик, автобус, трактор и т.п., должны быть определены и применены соответствующие ускорения и замедления. С точки зрения экологии и стоимости эти ускорения и замедления должны быть выполнены с оптимальным расходом топлива.
Подходящая скорость автотранспортного средства в определенной ситуации или местоположении может зависеть от ряда параметров, таких как конкретные условия дорожного движения или дорожные условия. Такие дорожные условия включают среди других параметров требуемую скорость для части дороги, где транспортное средство, например, зависит от ограничений скорости, состояния дорожной поверхности, которая, как известно, может стать скользкой вследствие дождя или льда, или наличия подъема или спуска.
В настоящее время существует множество электронных вспомогательных средств, доступных для определения таких параметров, используемых для определения соответствующей скорости автотранспортного средства. Такие электронные вспомогательные средства, которые теперь широкодоступны, включают электронные системы позиционирования, такие как Глобальная Система Позиционирования (GPS) и другие соответствующие системы позиционирования и электронные карты. Такие системы позиционирования могут предоставлять трехмерную информацию местонахождения, то есть информацию, касающуюся широты, долготы и высоты. Кроме того, электронные карты могут включать ограничения скорости, устанавливаемые для различных отрезков дороги, а также топологическую информацию. Кроме того, информация о погодных условиях, таких как температура, дождь и/или снегопад, предоставляется для транспортного средства датчиками на самом транспортном средстве, или информация передается на транспортное средство от одного или более внешних источников.
В системе предшествующего уровня техники, показанной в заявке на патент США 2005/0085974, в некоторой степени используются такие электронные вспомогательные средства для минимизации расхода топлива, причем в этой системе предшествующего уровня техники информация Глобальной системы позиционирования используется для определения текущей информации, и информация электронной карты используется для определения будущих местоположений. Кроме того, наклонная дорожная поверхность в конкретном местоположении определяется при помощи электронных датчиков на транспортном средстве, и на основании экстраполяций таких определений наклонной поверхности дороги может быть оценена топология местности, окружающей транспортное средство. Эти параметры тогда используются для определения открытия дросселя таким образом, что, например, учитывается сила тяжести при регулировании открытия дросселя.
Однако управление количеством топлива, подаваемого в двигатель, или регулирование открытия дросселя (то есть выполнение регулирования скорости транспортного средства) только с учетом таких параметров, которые минимизируют расход топлива, как на предшествующем уровне техники, может привести к режиму движения, который раздражает других участников дорожного движения. Таким образом, водители транспортных средств, следующих за автотранспортным средством, могут находить такой режим движения автотранспортного средства раздражающим, так как он не следует установившимся нормам движения.
Кроме того, системы регулирования скорости, не следующие таким установившимся нормам, также могут восприниматься самим водителем автотранспортного средства как неинтуитивные и недопустимые, что может приводить к отключению или блокированию им системы регулирования скорости. Такое отключение или блокирование системы регулирования скорости может срывать обеспечение оптимального расхода топлива, так как водитель в таком случае не следует указаниям системы регулирования скорости, что может приводить к более высокому расходу топлива.
Таким образом, в уровне техники существует необходимость в решении, которое предлагает такие характеристики ускорения для автотранспортного средства, что характеристики ускорения достигаются с оптимальным расходом топлива и одновременно расцениваются самим водителем автотранспортного средства, а также водителями окружающих транспортных средств как понятные и приемлемые характеристики вождения.
Раскрытие изобретения
Задачей настоящего изобретения является обеспечение определения характеристик ускорения с оптимальным расходом топлива, которое решает указанную выше проблему.
Настоящее изобретение направлено на получение управляемых характеристик ускорения, которые воспринимаются водителем автотранспортного средства как интуитивные.
Задача достигается благодаря способу определения характеристик ускорения с оптимальным расходом топлива согласно отличительной части пункта 1.
Задача также достигнута благодаря способу автоматизированного регулирования скорости автотранспортного средства согласно отличительной части пункта 12.
Задача также достигнута благодаря блоку управления, предназначенному для определения характеристик ускорения с оптимальным расходом топлива согласно отличительной части пункта 13.
Задача также достигнута благодаря системе для автоматизированного регулирования скорости автотранспортного средства согласно отличительной части пункта 19.
Способы определения характеристик ускорения с оптимальным расходом топлива и блоки управления согласно настоящему изобретению отличаются тем, что расстояние, на протяжении которого осуществляется ускорение, то есть участок ускорения, ограничено определенной длиной, то есть максимальным участком Sacc ускорения. Этот максимальный участок Sacc ускорения динамически определяется на основании по меньшей мере одного дорожного условия и по меньшей мере одной характеристики автотранспортного средства.
Благодаря ограничению участка ускорения в соответствии с настоящим изобретением достигаются характеристики ускорения, которые ощущаются подобно ускорению, к которому привык водитель автотранспортного средства при ускорении на горизонтальной дороге. Таким образом, благодаря определению максимального участка Sacc ускорения на основании по меньшей мере одного дорожного условия и по меньшей мере одной характеристики автотранспортного средства достигается ускорение, которое воспринимается водителем автотранспортного средства как интуитивное и нормальное.
Согласно настоящему изобретению учитывается общее признание необходимости снижения расхода топлива для тяжелых транспортных средств в различных ситуациях. Например, максимальный участок Sacc ускорения согласно изобретению может быть принят более протяженным на подъеме или для части участка дороги, имеющей много крутых поворотов, так как это обычно принято у других водителей. С другой стороны, максимальный участок Sacc ускорения согласно настоящему изобретению сделан короче для спуска, поскольку существует меньшая вероятность для других участников дорожного движения получения протяженного участка ускорения в такой ситуации.
Таким образом, характеристики ускорения будут приняты и самим водителем и водителями окружающих транспортных средств. Таким образом, общий расход топлива снижается, так как автоматизированное управление ускорением будет инициировано в течение более высокого процентного отношения по времени, когда автотранспортное средство находится в движении, чем если бы ускорение было неинтуитивным для водителя и окружающих транспортных средств.
Кроме того, характеристики ускорения динамически настроены в соответствии с изменениями по меньшей мере одного дорожного условия и/или характеристики двигателя, соответственно, что приводит к очень эффективному снижению расхода топлива.
Согласно варианту осуществления настоящего изобретения при определении максимального участка Sacc ускорения учитываются характеристики автотранспортного средства, такие как частота вращения и крутящий момент двигателя. Благодаря учету этих характеристик автотранспортное средство воспринимается водителем как реагирующий при осуществлении ускорения в соответствии с тем, к чему привык водитель при управлении такими автотранспортными средствами.
Согласно варианту осуществления настоящего изобретения при определении максимального участка Sacc ускорения также учитывается по меньшей мере один входной сигнал от водителя автотранспортного средства. Это дает физиологическое преимущество, заключающееся в том, что водитель имеет ощущение, что он управляет транспортным средством и одновременно контролирует характеристики ускорения, в то время как характеристики ускорения регулирует система таким образом, что все же достигается оптимальный расход топлива.
Варианты осуществления изобретения и преимущества характеристик ускорения, определенные в соответствии с изобретением, будут описаны ниже со ссылками на прилагаемые чертежи, поясняющие некоторые предпочтительные варианты осуществления изобретения.
Краткое описание чертежей
Фиг.1 - блок-схема последовательности операций, поясняющая способ, соответствующий изобретению.
Фиг.2 - силы, оказывающие влияние на транспортное средство.
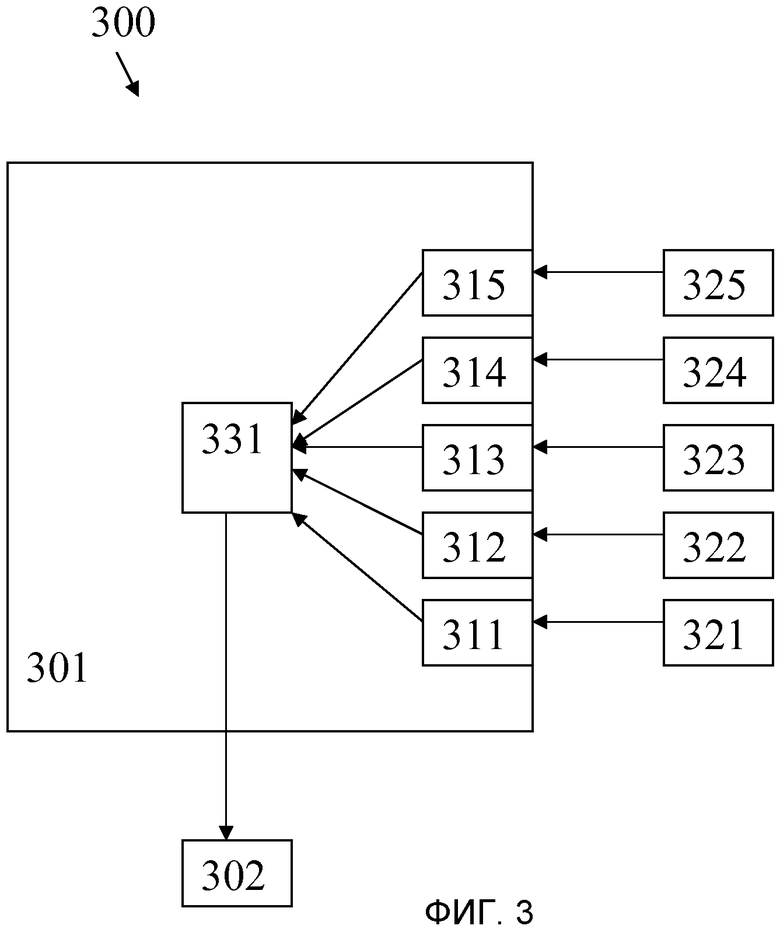
Фиг.3 - обобщенное представление системы, соответствующей изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
Обычно ускорение автотранспортного средства начинается в первом местоположении, в котором транспортное средство имеет начальную скорость, и продолжается, пока транспортное средство не достигнет целевой скорости. Целевая скорость достигается во втором местоположении, отделенном от первого положения длиной, соответствующей участку ускорения. Согласно настоящему изобретению соответствующие характеристики ускорения определены для заданного участка дороги, на котором находятся первое и второе местоположения.
При определении соответствующих характеристик ускорения существует много параметров, которые следует учитывать для достижения максимально возможно эффективных характеристик ускорения относительно расхода топлива. В частности, для этого могут использоваться дорожные условия участка дороги.
Например, одно такое дорожное условие представляет собой топологию по меньшей мере одной части участка дороги. Если после того, как горизонтальная часть участка дороги переходит в наклонную часть участка дороги, на протяжении которой требуется ускорение, с точки зрения экономии топлива может быть разумно не ускоряться на горизонтальном участке и использовать силу тяжести на спуске для ускорения. Таким образом, с учетом топологии на заданном участке дороги благодаря определению характеристики ускорения может быть увеличена эффективность расхода топлива. Соответствующие соображения также могут приниматься во внимание для других дорожных условий.
Однако использование дорожных условий для этого должно использоваться благоразумно. Обычно водитель транспортного средства имеет обоснованное мнение относительно того, что он рассматривает как приемлемое для характеристик управления, и что нет. Кроме того, водитель получает реакцию на его манеру управления от других участников дорожного движения, например, в форме световых сигналов и т.п. Таким образом, важно достигать приемлемые для водителя характеристики ускорения.
На фиг.1 показан способ, соответствующий настоящему изобретению. На первом этапе способа согласно настоящему изобретению определяются второе местоположение и целевая скорость. Второе местоположение представляет собой местоположение в пределах заданного участка дороги, в котором, в конечном итоге, должна быть достигнута целевая скорость. Второе местоположение и целевая скорость согласно варианту осуществления настоящего изобретения определяются на основании данных Глобальной Системы Позиционирования в комбинации с информацией, предоставленной информацией цифровой карты. Информация цифровой карты включает очень точные местоположения ограничений скорости, информацию, относящуюся к поворотам дороги, и т.п. Согласно другому варианту осуществления изобретения целевая скорость и второе местоположение также могут быть определены в зависимости от определенной скорости, которой желает достигнуть водитель в определенном местоположении.
На втором этапе способа определяются первое местоположение на участке дороги и начальная скорость, причем начальная скорость представляет собой скорость, которую автотранспортное средство будет иметь в первом местоположении. Первое местоположение согласно изобретению определяется на основании максимального участка Sacc ускорения, где максимальный участок Sacc ускорения определяется динамически на основании одного или более дорожных условий участка дороги и одной или более характеристик автотранспортного средства. Таким образом, максимальный участок Sacc ускорения изменяется со временем при изменении дорожных условий и/или характеристик автотранспортного средства. Начальная скорость, которую транспортное средство должно иметь в первом местоположении, согласно варианту осуществления изобретения может быть определена многими способами, подобно определению второго местоположения, например, на основании информации Глобальной Системы Позиционирования, информации, относящейся к топологии, поворотам, ограничениям скорости и т.п. Начальная скорость также может быть определена на основании действительной скорости транспортного средства в определенном местоположении, причем действительную скорость измеряют, например, по спидометру самого транспортного средства. Это особенно предпочтительно, если определенное первое местоположение близко или совпадает с определенным местоположением, в котором находится транспортное средство.
На третьем этапе способа согласно настоящему изобретению определяются характеристики ускорения, которое будет использоваться для автотранспортного средства на данном участке дороги. Согласно настоящему изобретению характеристики ускорения определяются на основании первого местоположения и начальной скорости из первого местоположения, второго местоположения и целевой скорости, достигаемой, самое позднее, во втором местоположении, причем расстояние между первым и вторым местоположениями, то есть участок ускорения, ограничено и короче или равно максимальному участку ускорения, определяемому на втором этапе способа, и на основании по меньшей мере одного дорожного условия для участка дороги.
Таким образом, согласно способу, соответствующему изобретению, расстояние, на котором осуществляется ускорение, то есть участок ускорения, ограничено определенной длиной, то есть максимальным участком Sacc ускорения, который динамически определен на основании по меньшей мере одного дорожного условия и по меньшей мере одной характеристики автотранспортного средства. Таким образом, максимальный участок Sacc ускорения может быть соответственно выбран таким образом, что характеристики ускорения воспринимаются водителем как интуитивно приемлемые и подобные ускорению на горизонтальной дороге.
Благодаря ограничению участка ускорения до пригодного максимального участка Sacc ускорения достигаются характеристики ускорения, которые ощущаются водителем автотранспортного средства, как подобные ускорению, которое он выполнил бы самостоятельно, если не существовало бы какого-либо автоматизированного управления ускорением. Таким образом, когда максимальный участок Sacc ускорения выбран разумно, ускорение, следующее согласно способу, соответствующему изобретению, ощущается водителем автотранспортного средства и другими участниками дорожного движения как соответствующее нормальной манере вождения, и, таким образом, существует очень небольшой риск того, что водитель транспортного средства отключит или блокирует автоматизированную систему регулирования скорости.
Согласно настоящему изобретению характеристики ускорения, которые будут приняты в пределах участка ускорения, то есть между первым и вторым местоположениями, основаны по меньшей мере на одном дорожном условии. Таким образом, учитываются одно или более дорожных условий для участка дороги при определении признаков этого ускорения, например, того, насколько резкое ускорение должно быть на участке ускорения. Таким образом, на некоторых частях участка ускорения может осуществляться впрыскивание большего количества топлива в двигатель, чем на других частях участка ускорения. Принимая во внимание дорожные условия, такие как топология, благодаря определению характеристик ускорения в пределах участка ускорения, достигается общее ускорение с оптимальным расходом топлива. Характеристики ускорения могут быть отрегулированы таким образом, чтобы они были различными в различных частях участка ускорения для достижения оптимального расхода топлива.
Таким образом, учитывается одно или более дорожных условий для участка дороги при определении характеристик ускорения и для определения максимального участка Sacc ускорения и признака/характеристик ускорения, которое фактически будет выполнено в пределах участка ускорения. Информация, относящаяся к таким дорожным условиям, может быть предоставлена, например, Глобальной Системой Позиционирования, электронной картой и/или датчиками на автомобиле. Согласно варианту осуществления настоящего изобретения, как было описано выше, такое дорожное условие включает информацию, основанную на топологии по меньшей мере для одной части участка дороги. Это позволяет использовать силу тяжести на склонах с осуществлением ускорения для повышения эффективности расхода топлива, когда учитывается топология на заданном участке дороги при определении характеристик ускорения.
Согласно варианту осуществления изобретения такое дорожное условие может также включать по меньшей мере одну требуемую скорость по меньшей мере для одной части участка дороги. Информация поступает, например, от Глобальной Системы Позиционирования, фотокамеры, транспортной системы опознавания знака или знаков ограничения скорости в комбинации с электронной картой, точной информацией, касающаяся местоположений и расстояний между знаками ограничения скорости. При анализе заданного участка дороги перед автотранспортным средством могут учитываться многие такие различные ограничения скорости при выборе общих характеристик ускорения для автотранспортного средства. Благодаря этому может быть повышена общая эффективность расхода топлива.
Кроме того, согласно варианту осуществления изобретения может учитываться прямолинейность по меньшей мере одной части указанного участка дороги при определении характеристик ускорения. Например, как известно, с точки зрения безопасности, может быть предпочтительно сдерживать ускорение, пока транспортным средством не будут пройдены крутые повороты. Информация, касающаяся прямолинейности участка дороги, может быть предоставлена, например, электронными картами, датчиками на транспортном средстве и т.п.
Другие дорожные условия, которые могут учитываться при определении характеристик ускорения, согласно вариантам осуществления изобретения являются ситуациями в движении по меньшей мере для одной части участка дороги, и многие другие транспортные средства, присутствующие по меньшей мере на одной части участка дороги. Информация, относящаяся к этим дорожным условиям, может быть предоставлена радарной системой, которая способна получить информацию о цели, такой как автомобили или другие транспортные средства, немедленно и, кроме того, перед транспортным средством и спереди слева и справа от транспортного средства. Кроме того, информация, относящаяся к дорожным условиям, может быть предоставлена фотографической системой с использованием способов идентификации объектов или информация может быть получена от Системы передачи радиоданных по каналу сообщений о транспортном движении (RDS-TMC).
Как указано выше, в связи со вторым этапом способа, соответствующего изобретению и показанного на фиг.1, определяют максимальный участок Sacc ускорения на основании по меньшей мере одного дорожного условия для участка дороги и по меньшей мере одной характеристики автотранспортного средства. По меньшей мере, одно дорожное условие может представлять собой одно или более из группы дорожных условий, описанных выше и используемых для определения характеристик ускорения. Таким образом, согласно различным вариантам осуществления настоящего изобретения, при определении максимального участка Sacc ускорения используют по меньшей мере одно условие из группы дорожных условий, включающих информацию, относящуюся к топологии по меньшей мере одной части участка дороги, по меньшей мере одной требуемой скорости по меньшей мере для одной части участка дороги, прямолинейности по меньшей мере одной части участка дороги, условия дорожного движения по меньшей мере для одной части участка дороги и количество других транспортных средств, присутствующих по меньшей мере на одной части участка дороги. Это по меньшей мере одно дорожное условие может быть таким же, как по меньшей мере одно дорожное условие, используемое при определении характеристик ускорения, выполняемом в пределах участка ускорения, но оно также может быть другим дорожным условием. Таким образом, и максимальный участок Sacc ускорения, и характеристики ускорения определяют на основании по меньшей мере одного дорожного условия, выбранного из той же группы дорожных условий, и выбранные одно или больше дорожных условий могут быть аналогичными или разными.
Как указано выше, максимальный участок Sacc ускорения согласно настоящему изобретению также определяют на основании по меньшей мере одной характеристики автотранспортного средства. Согласно варианту осуществления изобретения характеристика автотранспортного средства включает информацию, относящуюся к параметрам работающего двигателя. Эти параметры являются либо оборотами в минуту (частотой вращения), либо крутящим моментом двигателя автотранспортного средства, либо обоими параметрами. Таким образом, при определении максимального участка ускорения учитывается фактическое рабочее состояние двигателя автотранспортного средства.
Определение максимального участка Sacc ускорения на основании дорожных условий, таких как топология, требуемая скорость, прямолинейность, условия дорожного движения и количество присутствующих других транспортных средств, а также на основании характеристик двигателя, таких как частота вращения и крутящий момент двигателя, приводит к хорошему восприятию характеристик движения другими участниками дорожного движения и самим водителем. Например, другие участники дорожного движения обычно допускают и понимают, что большое и тяжелое автотранспортное средство нуждается в более протяженном участке ускорения, например, при движении на подъеме, или что большое и тяжелое автотранспортное средство не ускоряется очень быстро, если существует много поворотов на конкретном участке дороги. Настоящее изобретение учитывает такое допущение и понимание и динамически увеличивает максимальный участок Sacc ускорения таким образом, что он устанавливается на относительно более протяженном расстоянии.
С другой стороны, если, например, встречается спуск или прямая часть дороги, другие участники дорожного движения могут не относиться терпимо к очень протяженному участку ускорения. Таким образом, например, для спуска и/или прямой части дороги максимальный участок Sacc ускорения, предпочтительно, задается как относительно более короткое расстояние.
Кроме того, так как частота вращения и крутящий момент двигателя учитываются при определении максимального участка Sacc ускорения, автотранспортное средство может реагировать при осуществлении ускорения в соответствии с тем, к чему привык водитель при управлении такими автотранспортными средствами.
Согласно варианту осуществления настоящего изобретения, по меньшей мере одна характеристика двигателя включает один или более параметров, характерных для автотранспортного средства. Эти параметры представляют собой вес транспортного средства; характеристики двигателя, например, с учетом того, является ли двигатель дизельным или бензиновым двигателем; сопротивление воздуха для автотранспортного средства; трансмиссию, используемую с двигателем, когда различные трансмиссии имеют различные характеристики; тормозную систему, используемую в автотранспортном средстве; сопротивление качению транспортного средства; общее передаточное число автотранспортного средства; силы инерции, воздействующие на автотранспортное средство; и различные силы трения, оказывающие влияние на автотранспортное средство.
Более конкретно, согласно варианту осуществления настоящего изобретения, показанному на фиг.2, максимальный участок ускорения определяется при поддержании состояния оптимальной эффективности ηmax(G, δ) работы двигателя, то есть в состоянии, в котором двигатель максимально эффективен. Это состояние оптимальной эффективности ηmax(G, δ) определяется электронным блоком управления и на основании минимального расхода δ топлива и правильно выбранного передаточного числа G, когда расход топлива зависит от конкретного двигателя в автотранспортном средстве и от параметров работающего двигателя, то есть от используемой частоты вращения и крутящего момента двигателя и передаточного числа G, выбранного в зависимости от частоты вращения.
Для двигателя, работающего в состоянии оптимальной эффективности ηmax(G, δ), силы, воздействующие на автотранспортное средство в обычной ситуации, показанной на фиг.2, выражены следующими уравнениями:

 (Ур.1)
(Ур.1)
где:
 - равнодействующая сила, которая зависит от передаточных чисел i
t, i
f, эффективностей ηt, ηf, радиуса r
w колес и результата Meng(ηmax) измерения крутящего момента двигателя,
- равнодействующая сила, которая зависит от передаточных чисел i
t, i
f, эффективностей ηt, ηf, радиуса r
w колес и результата Meng(ηmax) измерения крутящего момента двигателя,
F brake - сила, создаваемая тормозной системой,
F
airdrag(v)= - сила сопротивления воздуха автотранспортному средству, которая зависит от скорости v транспортного средства, постоянного коэффициента c
w лобового сопротивления воздуха, лобовой поверхности A
a транспортного средства
и плотности ρа воздуха,
- сила сопротивления воздуха автотранспортному средству, которая зависит от скорости v транспортного средства, постоянного коэффициента c
w лобового сопротивления воздуха, лобовой поверхности A
a транспортного средства
и плотности ρа воздуха,
F roll(α)=c r mgcos(α) - сила, создаваемая сопротивлением c r качению вследствие массы m автотранспортного средства, где α является наклоном поверхности дороги,
F gravity(α)=mgsin(α) - сила тяжести, где α является наклоном поверхности дороги,
m t - полная динамическая масса транспортного средства,
где m
t=
и J w и J e представляют инерцию двигателя и колес, соответственно, и
v - скорость автотранспортного средства.
Если к уравнению 1 применить цепное правило, выводится следующее уравнение:
 (Ур.2)
(Ур.2)
где скорость выражена относительно расстояния (а не относительно времени). Таким образом, если затем проинтегрировать уравнение 2, получится выражение для участка ускорения, который определяет характеристики ускорения с оптимальным расходом топлива с учетом дорожных характеристик (топология в форме уклона α) и характеристик автотранспортного средства. Таким образом, максимальный участок Sacc ускорения, согласно варианту осуществления настоящего изобретения, может быть определен как:
 (Ур.3)
(Ур.3)
где v initial и v target являются начальной и целевой скоростью, соответственно для автотранспортного средства в первом и втором местоположении участка дороги, соответственно.
При определении максимального участка Sacc ускорения, в соответствии с уравнением 3, можно достигать очень точного определения максимального участка Sacc ускорения, который дает характеристики управления с оптимальным расходом топлива.
Согласно варианту осуществления настоящего изобретения также учитывается по меньшей мере один входной сигнал от водителя автотранспортного средства при определении максимального участка Sacc ускорения. Согласно варианту осуществления изобретения учитывается величина, соответствующая произвольному максимальному участку Sacc ускорения и вводимая водителем. Здесь водитель может вводить максимальный участок Sacc ускорения по его собственному выбору по меньшей мере части участка дороги, что дает преимущество в том, что водитель осознает, что он отвечает за характеристики ускорения.
Согласно варианту осуществления изобретения водителем может быть выбрана величина, соответствующая одному поправочному коэффициенту k из ряда заданных поправочных коэффициентов. Согласно этому варианту осуществления изобретения максимальный участок ускорения, определяемый в соответствии с описанным выше способом, рассматривается как предварительный максимальный участок Saccprel ускорения. Выбранный заданный поправочный коэффициент k тогда умножается на предварительный максимальный участок Saccprel ускорения для определения максимального участка ускорения. Таким образом, максимальный участок Sacc ускорения определяется в соответствии с Sacc=kSaccprel.
Как правило, набор поправочных коэффициентов k может быть выбран таким образом, что он содержит величины, соответствующие различным типам управления. Например, набор может содержать три величины, составляющие k=1 (соответствует «нормальному состоянию» или «экономичному»), k=0,75 (соответствует «полуспортивному» или «среднему») и k=0,5 (соответствует «спортивному»). Предоставление водителю возможности регулировать максимальный участок ускорения посредством выбора одного из заданного набора поправочных коэффициентов k дает преимущество в том, что водитель имеет ощущение способности управлять характеристиками ускорения, при том, что влияние водителя с точки зрения системы может контролироваться, поскольку набор поправочных коэффициентов k устанавливается системой. Таким образом, водитель может только регулировать характеристики ускорения в пределах границ регулирования, что гарантирует то, что оптимальный расход топлива сохраняется на высоком уровне.
Согласно варианту осуществления настоящего изобретения водитель может вводить величину, соответствующую максимальному участку Sacc ускорения, который зависит от изменения скорости. Здесь, если осуществляется относительно большое изменение скорости, например, когда автотранспортное средство выходит на полосу ускорения шоссе, водитель может оповещать об этом систему, которая затем корректирует максимальный участок Sacc ускорения до относительно более короткого расстояния. С другой стороны, если изменение скорости относительно мало, например, когда автотранспортное средство выезжает из деревни с меньшим ограничением скорости и выходит на проселочную дорогу с немного более высоким ограничением скорости, максимальный участок Sacc ускорения может быть задан относительно более длинным. Это регулирование максимального участка Sacc ускорения предпочтительно, так как было определено, что другие участники дорожного движения могут терпеть то, что ускорение, например, от 50 километров в час до, например, 70 километров в час при выезде из деревни растягивается до относительно большего расстояния, чем ускорение, например, от 50 километров в час до, например, 110 километров в час на полосе ускорения. Кроме того, согласно варианту осуществления изобретения максимальный участок Sacc ускорения, зависящий от изменения скорости, определяется на основании фактического местоположения, где должно иметь место ускорение. В типичном случае, может использоваться информация Глобальной Системы Позиционирования и информация электронных карт для определения того, когда могут быть приняты более короткий и более длинный максимальный участок Sacc ускорения. Например, эта информация может использоваться для определения того, выходит ли автотранспортное средство на полосу ускорения шоссе или нет.
Для всех вариантов осуществления изобретения, включающих учет входного сигнала от водителя, максимальный участок Sacc ускорения может регулироваться только в определенных рамках, установленных системой таким образом, что характеристики ускорения удовлетворяют требованиям безопасности движения и все же приводят к существенному улучшению оптимальности расхода топлива по сравнению с тем, когда водитель определяет характеристики ускорения совершенно самостоятельно.
Согласно настоящему изобретению пригодные характеристики ускорения определяются для заданного участка дороги, имеющего определенную длину. Согласно варианту осуществления изобретения эта длина также может регулироваться. Длина может регулироваться на основании рабочих характеристик системы, то есть насколько экономична по топливу реально является система. Длина также может регулироваться на основании памяти и производительности системы, доступной для вычисления и оценки в соответствии со способами согласно изобретению.
Кроме того, способ, соответствующий изобретению, может быть осуществлен компьютерной программой, имеющей кодовое средство, которое, когда оно работает в компьютере, вызывает выполнение компьютером этапов способа. Компьютерная программа включена в машиночитаемый носитель компьютерного программного продукта. Машиночитаемый носитель может состоять по существу из любой памяти, такой как ПЗУ (постоянное запоминающее устройство), ППЗУ (программируемая постоянная память), стираемая программируемая постоянная память (стираемое ППЗУ), флэш-память, ЭСППЗУ (электрически стираемое программируемое постоянное запоминающее устройство) или жесткий диск.
На фиг.3 показана система 300 для автоматизированного регулирования скорости автотранспортного средства, которая включает блок 301 управления, выполненный с возможностью определения характеристики ускорения с оптимальным расходом топлива для автотранспортного средства для заданного участка дороги. Блок 301 управления включает по меньшей мере средства 311-315 приема, выполненные с возможностью приема информации местонахождения, полученной от блока 321 системы позиционирования, информации электронной карты, полученной от блока 322 информации электронной карты, информации, относящейся по меньшей мере к одному дорожному условию, полученной от блока 323 информации о дорожных условиях, информации, относящейся по меньшей мере к одной характеристике автотранспортного средства, полученной от блока 324 характеристик автотранспортного средства, и информации, относящейся по меньшей мере к одному входному сигналу, полученному от устройства 325 ввода, получающего входной сигнал от водителя автотранспортного средства, соответственно.
Блок 301 управления также включает средство 331 определения, которое выполнено с возможностью определения по меньшей мере первого местоположения, из которого начинается ускорение, для динамического определения максимального участка Sacc ускорения, в течение которого должно быть выполнено ускорение, на основании одного или более дорожных условий и по меньшей мере одной характеристики автотранспортного средства и для определения характеристик ускорения в пределах участка ускорения.
Возможны различные конфигурации системы 300. Например, на фиг.3 средство 331 определения изображено как единый блок. Однако средство 331 определения также может быть составлено по меньшей мере двумя отдельными взаимодействующими блоками. Кроме того, блок 301 управления может быть выполнен как электронный управляющий блок (блоки 321-325, предоставляющие информацию средствам 311-315 приема, также как и средства 311-315 приема, могут быть расположены в пределах или вблизи блока 301 управления или могут быть распределены по различным местоположениям в автомобиле. Когда один или более этих блоков 321-325 и средств 311-315 приема распределены в автотранспортном средстве, они могут быть связаны с блоком 301 управления через асинхронную последовательную коммуникационную шину или шину любого другого типа, или через соединение любого другого вида, способное предоставить необходимую информацию в блок 301 управления, такое как беспроводное соединение.
Согласно варианту осуществления изобретения средство 331 определения также основывает его решения, касающиеся характеристик ускорения, на входном сигнале от водителя автотранспортного средства, получаемого средством 331 определения от устройства 325 ввода через средство 315 приема. Устройство 325 ввода может быть устроено таким образом, что величина произвольного входного сигнала может быть введена водителем, то есть быть входной величиной, соответствующей произвольному максимальному участку Sacc ускорения. Устройство ввода также может быть выполнено таким образом, что водитель может выбрать одну из ряда доступных входных величин, то есть величину, соответствующую одному поправочному коэффициенту в ряде заданных поправочных коэффициентов, которые должны быть умножены на максимальный участок Sacc ускорения для коррекции максимального участка Sacc ускорения.
Когда характеристики ускорения определены блоком 301 управления, блок 301 управления управляет скоростью автотранспортного средства посредством управления устройством 302 изменения скорости автотранспортного средства. Устройство 302 изменения скорости, например, может быть устройством изменения положения дросселя или любым другим устройством, способным изменять скорость транспортного средства.
Система 300 для автоматизированного регулирования скорости автотранспортного средства согласно изобретению может модифицироваться специалистами в данной области техники по сравнению с приведенными в качестве примера вариантами осуществления изобретения, описанными выше. В частности, система 300 может быть модифицирована для осуществления всех вариантов осуществления способа согласно настоящему изобретению.
Как будет очевидно для специалиста в данной области техники, в описанные выше варианты осуществления изобретения могут быть внесены многие другие варианты выполнения, модификации, изменения и/или дополнения. Следует понимать, что изобретение включает все такие другие варианты выполнения, модификации, изменения и/или дополнения, которые входят в объем формулы изобретения.

Изобретение относится к области автотранспортных средств и предназначено для контроля движения автотранспортных средств. Система автоматизированного регулирования скорости автотранспортного средства содержит блок управления, устройство изменения скорости автотранспортного средства. Определение характеристик ускорения основано на определенной начальной скорости автотранспортного средства в первом местоположении на участке дороги и определенной целевой скорости автотранспортного средства в определенном втором местоположении на участке дороги, причем второе местоположение отделено от первого местоположения участком ускорения. Согласно изобретению первое местоположение определяют таким образом, что участок ускорения короче или равен максимальному участку Sacc ускорения, при этом максимальный участок Sacc ускорения динамически определяют на основании первого дорожного условия для участка дороги и характеристики автотранспортного средства. Достигаются интуитивно приемлемые характеристики ускорения, оптимальный расход топлива. 4 н. и 15 з.п. ф-лы, 3 ил.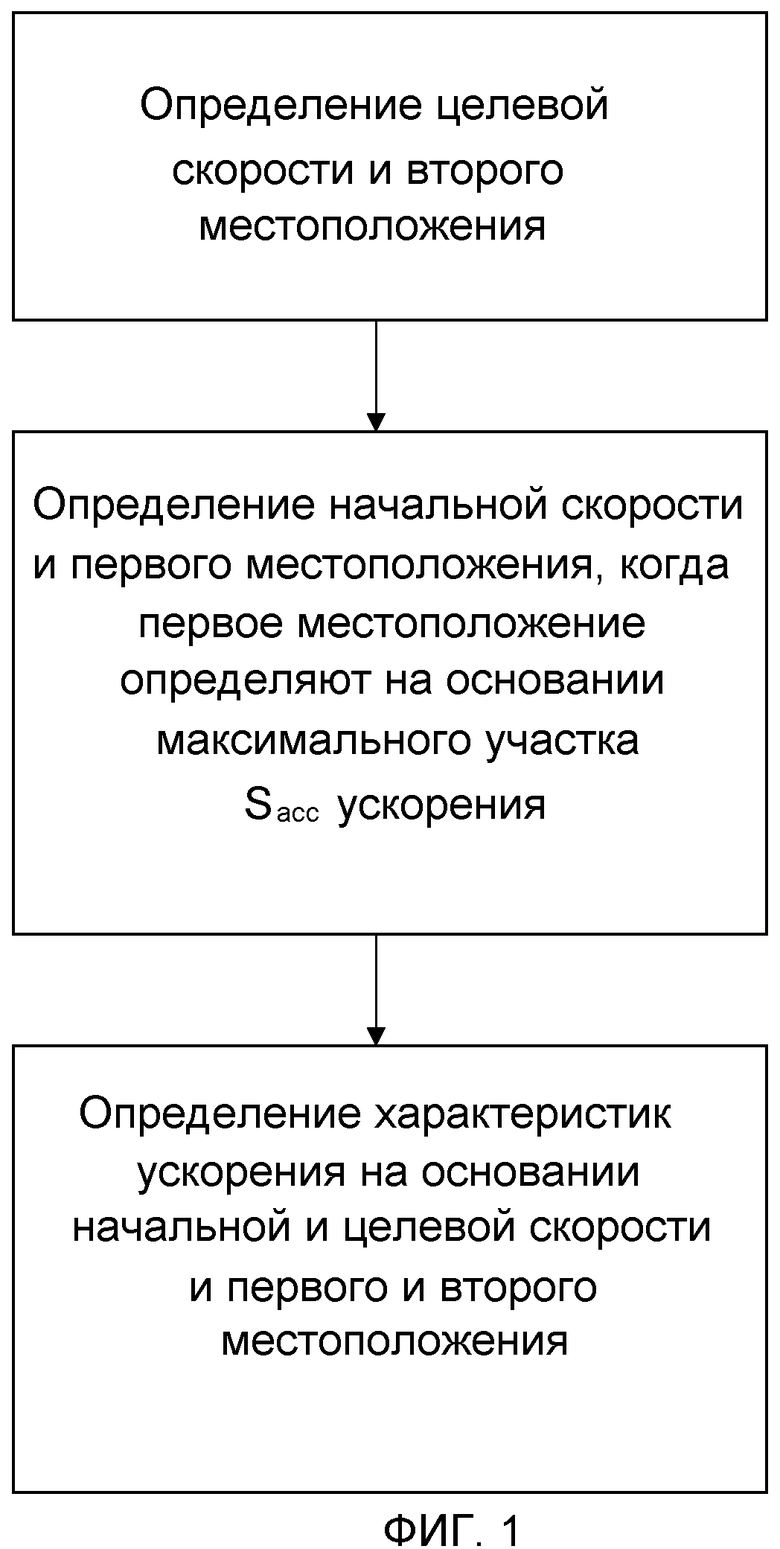
1. Способ определения характеристик ускорения с оптимальным расходом топлива автотранспортного средства для заданного участка дороги на основании: определенной начальной скорости автотранспортного средства в первом местоположении на участке дороги и определенной целевой скорости автотранспортного средства в определенном втором местоположении на участке дороги, причем второе местоположение отделено от первого местоположения участком ускорения, отличающийся тем, что первое местоположение определяют так, что участок ускорения короче или равен максимальному участку Sacc ускорения, при этом максимальный участок Sacc ускорения динамически определяют на основании, по меньшей мере, одного первого дорожного условия для участка дороги и, по меньшей мере, одной характеристики автотранспортного средства.
2. Способ по п.1, в котором характеристики ускорения, которые будут выполнены в пределах участка ускорения, определяют на основании, по меньшей мере, одного второго дорожного условия для участка дороги.
3. Способ по п.1 или 2, в котором каждое из, по меньшей мере, одного первого и, по меньшей мере, второго дорожного условия относится, по меньшей мере, к одному дорожному условию из группы, включающей: топологию, по меньшей мере, для одной части участка дороги, по меньшей мере, одну требуемую скорость, по меньшей мере, для одной части участка дороги, прямолинейность, по меньшей мере, одной части участка дороги, транспортной ситуации, по меньшей мере, для одной части участка дороги, количество транспортных средств, кроме указанного автотранспортного средства, присутствующих, по меньшей мере, на одной части участка дороги.
4. Способ по п.1, в котором, по меньшей мере, одна характеристика автотранспортного средства относится к оборотам в минуту (частоте вращения) и/или крутящему моменту двигателя автотранспортного средства.
5. Способ по п.1, в котором, по меньшей мере, одна характеристика автотранспортного средства относится, по меньшей мере, к одному из особых параметров или признаков автотранспортного средства из группы, включающей: вес, характеристики двигателя, сопротивление воздуха, трансмиссию, тормозную систему, сопротивление качению, полное передаточное число, силы инерции, различные силы трения.
6. Способ по п.4 или 5, в котором максимальный участок Sacc ускорения определяют согласно:
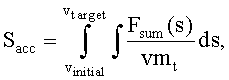
где
Fsum=Fengine(ηmax)-Fbrake-Fairdrag(v)-Froll(α)-Fgravity(α),
где
Fengine(ηmax) - равнодействующая сила двигателя,
Fairdrag(v) - сила, вызванная сопротивлением воздуха автотранспортному средству,
Froll(α) - сила, вызванная сопротивлением качению,
Fgravity(α) - сила тяжести,
α - наклон поверхности дороги,
vinitial - начальная скорость автотранспортного средства в первом местоположении,
vtarget - целевая скорость автотранспортного средства во втором местоположении,
mt - полная динамическая масса автотранспортного средства и
v - скорость автотранспортного средства.
7. Способ по п.1, в котором максимальный участок Sacc ускорения определяют также на основании, по меньшей мере, одного входного сигнала от водителя автотранспортного средства.
8. Способ по п.7, в котором входной сигнал может быть выбран согласно любой величине из группы, включающей: величину, соответствующую произвольному максимальному участку Sacc ускорения; величину, соответствующую одному поправочному коэффициенту в ряде заданных поправочных коэффициентов, причем заданные поправочные коэффициенты умножают на максимальный участок Sacc ускорения; величину, соответствующую изменению скорости, зависящему от максимального участка Sacc ускорения.
9. Способ по п.8, в котором зависящий от изменения скорости максимальный участок Sacc ускорения зависит от фактического местоположения, где должно быть выполнено ускорение.
10. Способ по п.1, в котором длина заданного участка дороги является регулируемой.
11. Способ по п.1, в котором максимальный участок Sacc ускорения определяют так, что характеристики ускорения воспринимаются водителем автотранспортного средства как подобные ускорению на горизонтальной дороге.
12. Способ автоматизированного регулирования скорости автотранспортного средства, отличающийся тем, что, когда осуществляется ускорение от начальной скорости до целевой скорости, указанное ускорение осуществляется устройством изменения скорости автотранспортного средства на основании характеристик ускорения, определенных по любому из пп.1-11.
13. Блок управления, выполненный с возможностью определения характеристик ускорения с оптимальным расходом топлива автотранспортного средства для заданного участка дороги, содержащий средство определения, выполненное с возможностью определения характеристик ускорения на основании: определенной начальной скорости автотранспортного средства в первом местоположении на участке дороги и определенной целевой скорости автотранспортного средства в определенном втором местоположении на участке дороги, причем второе местоположение отделено от первого местоположения участком ускорения, отличающийся тем, что он содержит: средство, выполненное с возможностью определения первого местоположения так, что участок ускорения короче или равен максимальному участку Sacc ускорения, и средство, выполненное с возможностью динамического определения максимального участка Sacc ускорения на основании, по меньшей мере, одного первого дорожного условия для участка дороги и, по меньшей мере, одной характеристики автотранспортного средства.
14. Блок по п.13, содержащий средство, выполненное с возможностью определения характеристик ускорения, которое будет выполнено в пределах участка ускорения, на основании, по меньшей мере, одного второго дорожного условия для участка дороги.
15. Блок по п.13 или 14, в котором средство для динамического определения максимального участка Sacc ускорения соединено, по меньшей мере, со средством приема, выполненным с возможностью приема:
информации о местоположении,
информации электронной карты,
информации, относящейся к, по меньшей мере, одному дорожному условию, и информации, относящейся к, по меньшей мере, одной характеристике автотранспортного средства.
16. Блок по п.13, в котором средство определения, выполненное с возможностью динамического определения максимального участка Sacc ускорения, соединено со средством приема, выполненным с возможностью приема, по меньшей мере, одного входного сигнала от водителя автотранспортного средства.
17. Блок по п.16, в котором средство приема, выполненное с возможностью приема, по меньшей мере, одного входного сигнала от водителя, выполнено с возможностью приема одного типа входного сигнала из группы, включающей: величину, соответствующую произвольному максимальному участку Sacc ускорения, и величину, соответствующую одному поправочному коэффициенту из ряда заданных поправочных коэффициентов, причем заданные поправочные коэффициенты умножают на максимальный участок Sacc ускорения.
18. Блок по п.13, содержащий средство регулирования, выполненное с возможностью корректирования длины заданного участка дороги.
19. Система автоматизированного регулирования скорости автотранспортного средства, отличающаяся тем, что она содержит: блок управления по любому из пп.13-18, и
устройство изменения скорости автотранспортного средства, управляемое указанным блоком управления.
| US 2005085974 А1, 21.04.2005 | |||
| US 5832400 А, 03.11.1998 | |||
| WO 2005005191 A1, 20.01.2005 | |||
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1127784A1 |
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |

