Изобретение относится к области авиастроения и может быть использовано при создании вертолетов, в первую очередь с соосным расположением винтов, призванных работать в особо сложных условиях, для повышения безопасности экипажа и надежности машины.
Известны оптические системы обеспечения безопасности, например, система, содержащая оптические датчики и блок обработки оптической информации, фиксирующие прохождение лопастей винта на фоне неба и фильтрующие ложную информацию (см. патент Великобритании №2286666, В64С 27/00, 1995 г.).
К недостаткам оптических систем следует отнести сложность конструкции, значительные габариты и высокую стоимость.
Известно также использование датчиков вибрации с целью определения величины дисбаланса лопастей винтов (см. патент США №3795375, В64С 27/00, 1974 г.).
Однако вибрация лопастей есть только косвенное и необязательное следствие дисбаланса, а сам дисбаланс и вибрация не являются достаточными критериями диагностики. Поэтому достоверность работы известного устройства невелика.
Наиболее близким к предложенному является система обеспечения безопасности вертолета, содержащая антенну, излучающую сигнал в направлении вращающихся лопастей винта. Импеданс антенны меняется при прохождении одной из лопастей в зависимости от величины расстояния и модулирует несущую частоту, для чего, помимо антенны, в известном устройстве предусмотрены генератор, приемник и блок обработки (см. патент США №6448924, В64С 27/00, 1999 г.). Таким образом, известная система содержит, по меньшей мере, один передатчик и детектор, причем выход последнего соединен со входом блока обработки.
К недостаткам известной системы безопасности следует отнести недостаточную чувствительность и узкие функциональные возможности. Низкая чувствительность связана с конструктивными особенностями и способом выделения полезной информации (по изменению импеданса антенны). То же можно сформулировать иначе: известная схема выделения информации о положении лопастей не позволяет повышать чувствительность из-за значительного воздействия мешающих факторов, в частности, влияния соседних лопастей, особенно в соосной схеме. Недостаточные функциональные возможности известного устройства связаны с тем, что оно не учитывает режим полета и не позволяет учесть положение лопастей двух винтов друг относительно друга и корпуса вертолета и ряд других параметров. Все это не только ограничивает возможности системы, но и снижает ее эффективность.
Техническим результатом, ожидаемым от использования изобретения, является повышение безопасности вертолета, повышение эффективности системы обеспечения безопасности за счет повышения ее чувствительности и расширения функциональных возможностей.
Указанный результат достигается тем, что известная система обеспечения безопасности вертолета в критических режимах, содержащая группу передатчиков и блок обработки, снабжена блоком анализа и группой приемников, выходы которых подключены к первой группе информационных входов блока анализа, выход которого через бортовой вычислитель соединен с органами управления и/или индикации вертолета, причем вторая группа информационных входов блока анализа соединена с соответствующей группой выходов бортового вычислителя.
При этом группы передатчиков и приемников могут быть расположены на одном и другом винтах соосного вертолета.
Кроме того, группы передатчиков и приемников, размещенных на элементах конструкции вертолета, могут образовывать многосвязную систему регистрации отклонения пространственного положения элементов конструкции от нормального.
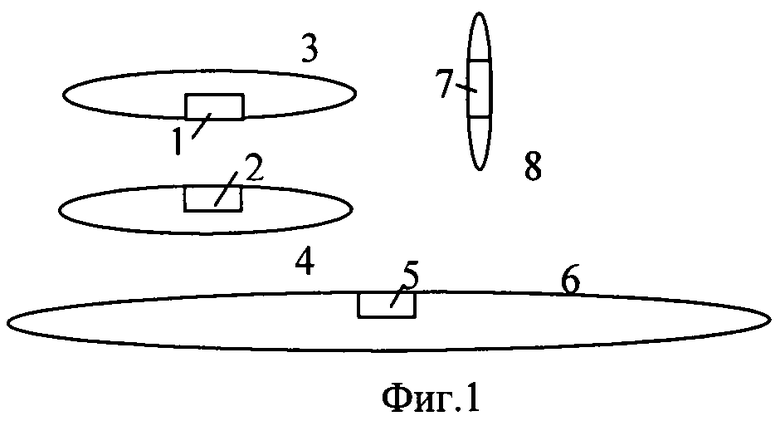
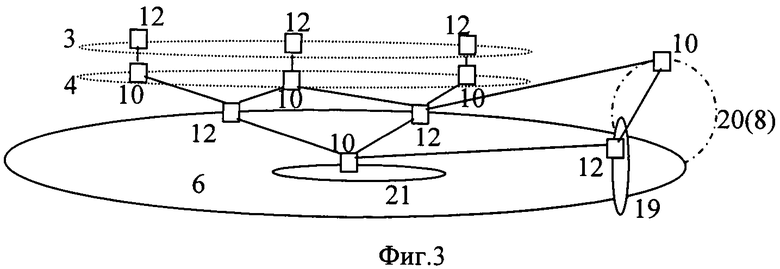
На фиг.1 показано размещение элементов системы на элементах конструкции вертолета. Фиг.2 иллюстрирует блок-схему системы обеспечения безопасности. На фиг.3 показан пример построения многосвязной системы регистрации отклонения пространственного положения элементов конструкции от нормального.
Система (фиг.1) содержит приемник 1 и передатчик 2 (или передатчик 1 и приемник 2), размещенные на лопастях 3, 4 соосных винтов. Один или несколько приемников или передатчиков 5 могут быть расположены на корпусе 6 вертолета, точно так же приемник или передатчик 7 может размещаться на хвостовой балке или элементе оперения 8.
Иными словами, на корпусе и винтах вертолета размещена группа 9 передатчиков 10 и группа 11 соответствующих им приемников 12, способных принимать сигнал одного или нескольких передатчиков 10, что показано фигурной стрелкой (фиг.2). Запитка передатчиков осуществляется частотой генераторов 13, а сигнал с выхода приемников 12 поступает на соответствующие амплитудные детекторы 14. Выходы детекторов 14 соединены с первой группой информационных входов блока 15 анализа, выход которого соединен с вновь образованным входом бортового вычислителя 16. С блока 15 на этот вход поступает информация, используемая в вычислителе 16 для управления органами 17 управления вертолетом и/или средствами индикации (оповещения экипажа или наземных служб), также условно обозначенными на фиг.2 позицией 17. Позицией 18 обозначены датчики, дающие на вход вычислителя 16 информацию о ветровой нагрузке, скорости, высоте, курсе и других параметрах полета. После обработки эта информация с выхода вычислителя 16 поступает на вторую группу информационных входов блока 15 анализа.
Как показано на фиг.3, на корпусе 6 могут располагаться два приемника 12, на лопастях 3 верхнего винта три, а на хвостовом оперении 19 - один передатчик 12. Передатчики 10 могут располагаться на лопастях 4 нижнего винта (три), на элементе хвостового оперения 20 (один), на крыле 21 (один). Передатчики 12 линиями соединены с приемниками 10, настроенными на их частоту, так что линии на фиг.3 показывают связи в многосвязной системе регистрации отклонения пространственного положения элементов конструкции от нормального. Так, передатчик 12 на корпусе 6 связан с двумя приемниками на лопастях 4 и одним на крыле 21 и т.д. Связи устанавливаются из условий: данные от приемников 12 об их положении относительно связанных с ними передатчиков 10 должны быть достаточны для определения взаимного положения всех элементов конструкции, на которых передатчики 10 или приемники 12 установлены, и число связей в системе не является избыточным. Выполнить это условие можно путем решения соответствующей системы уравнений, а также установив сначала связь всех приемников 12 со всеми передатчиками 10, а затем поочередно исключая дальние связи и проверяя достаточность информации, т.е. возможность определения взаимного положения всех элементов конструкции.
Система работает следующим образом. Вблизи критических режимов полета, при резком маневрировании, сильной ветровой нагрузке может происходить деформация лопастей и других элементов конструкции вертолета. Величина этой деформации фиксируется по величине амплитуды сигнала, принимаемого приемником 12. Последняя выделяется детектором 14, выполненным, например, в виде последовательно соединенных собственно амплитудного детектора и аналого-цифрового преобразователя.
Эта информация поступает на блок 15, в котором выполняются все или несколько из следующий операций:
- данные об амплитуде сигналов с выхода детекторов 14 преобразуются в данные о величине деформации элементов конструкции вертолета, о величине отклонения их положения от нормального,
- эти отклонения сравниваются с предшествующими значениями, и по величине производных делается прогноз о развитии ситуации,
- эти отклонения и/или производные сравниваются с пороговыми значениями или
- по этим значениям для совокупности звеньев многосвязной системы регистрации отклонения пространственного положения элементов конструкции от нормального определяется комплексный показатель опасности, вероятность аварийной ситуации,
- при расчете данного показателя используются хранящиеся в блоке 15 или вычислителе 16 сведения о сроке службы элементов конструкции и времени, прошедшем с момента замены или ремонта отдельных элементов,
- при расчете показателя и/или прогнозировании развития ситуации используется также информация о скорости, нагрузках, положении элементов управления. Эти данные поступают от вычислителя 16,
- формируются сигналы, корректирующие действия пилота или дающие ему информацию о близости критических режимов и путях предотвращения аварийной ситуации.
Как отмечалось выше, система предназначена, прежде всего, для вертолетов соосной схемы, где при критических углах и ускорениях лопасти 3, 4 несущих винтов могут сблизиться вплоть до взаимного соприкосновения и разрушения, но может быть полезна и для наблюдения за поведением лопастей винтов в других схемах летательных аппаратов.
Система измеряет в реальном времени взаимное расположение своих элементов (передатчиков 10 и приемников 12), размещенных в лопастях 3, 4 (при необходимости - в нескольких точках, но главным образом на концах, где деформация максимальна), а также, например, на хвостовой балке и элементах оперения.
Система фиксирует взаимное расстояние между элементами лопастей 3, 4 винтов в момент их прохода друг над другом (сближения), а также, при необходимости, положение датчиков лопастей 3, 4 относительно датчиков на корпусе 6 (хвостовое оперение и пр.). По данным замерам в реальном времени определяется взаимное положение винтов, а также их положение по отношению к элементам корпуса машины.
Результаты измерений, а также вычисленные по ним производные движения лопастей (скорости, ускорения и т.п.) позволяют предсказать тенденции и определить близость критических режимов. Эта информация позволяет скорректировать управление системой соответствующим образом (например, вибрацией на ручке управления вертолета или иным способом индикации сообщить пилоту о близости критического режима либо ввести автоматические ограничения (в том числе, например, с изменением усилия или ограничением на элементы ручного управления).
Как отмечено выше, для уточнения предсказания поведения лопастей и ЛА в целом в блок 15 целесообразно вводить дополнительную информацию, например, о текущей скорости и направлении вектора движения ЛА, а также скорости и направлении воздушного потока.
Пример 1. Три передатчика 10 с уникальными сигналами располагаются на концах трех лопастей 4 нижнего винта соосной двухвинтовой схемы, а три приемника 12 - на концах лопастей 3 верхнего винта (питание и съем сигналов могут осуществляться по уже существующим в лопастях элементам проводки либо сигнал - по радиоканалу, а питание - автономное, с индукционной подзарядкой). Дополнительные приемники 12 могут быть размещены на хвостовой балке и элементах оперения, вблизи которых также проходит при вращении лопасть 4 нижнего винта. При сближении каждой пары приемник-передатчик приемником 12 выделяется и распознается индивидуальный сигнал каждого передатчика 10 и по его максимальной амплитуде определяется расстояние до него (вычислительная часть может быть выполнена также в едином для системы блоке либо и в приемнике и в общем блоке для увеличения надежности системы при повреждениях - при этом информация, поступающая с приемника 12, может быть минимизирована, передаваться надежно и с избыточностью, как это обычно имеет в системах обеспечения безопасности).
Датчики на лопастях показывают взаимное положение и форму двух встречно вращающихся конусов несущих винтов, а датчик (или датчики) на хвостовой балке и других конструкциях дают привязку положения этих фигур вращения в системе координат, например, вертолета в целом.
Пример 2. Все датчики (пара приемник 12 - передатчик 10) выполнены в виде приемопередатчиков, где любая пара обменивается сигналами встречно (но независимо, что надежнее, хотя режим запрос-ответ также возможен). Все сигналы - электромагнитные, а антенны в простейшем случае представляют собой плоские катушки. Характер сигналов при этом по мощности и спектру должен удовлетворять требованиям электромагнитной совместимости с другими системами борта и обладать помехоустойчивостью в отношении мощных наземных излучающих систем.
Система допускает различные способы калибровки и обеспечивает живучесть при выходе из строя одного или нескольких датчиков.
Дополнительно, архивированная информация предлагаемой системы может быть полезна для оценки реального ресурса лопастей, редуктора и т.п. (за счет перманентного измерения деформаций и ускорений), что может быть учтено как для своевременной замены (что также увеличивает безопасность), так и для автоматического (например) изменения предельных констант, обозначающих критические режимы - для комплектов с большим износом или в конце срока службы.
Кроме того, возможна диагностика повреждений лопастей и элементов крепления в реальном времени по изменившемуся или аномальному поведению при различных эволюциях. По модуляции амплитуды сигнала датчиков можно обнаружить и измерить вибрацию лопасти с дефектом (определив номер дефектной лопасти методом исключения, анализируя на предмет наличия характера модуляции сигналы всех датчиков).
Таким образом, предложенное решение призвано повысить безопасность полетов, увеличить эффективность маневрирования (введением разумных и уместных ограничений на управление, вместо существующих - выбранных жестко, с большими запасами, но все равно не всегда достаточных). Наиболее эффективны предложенные средства при полетах и маневрировании в условиях горной местности, а также при эксплуатации в море, в сложных погодных условиях и при других ограничениях (посадка на палубу и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ ВЕТРОГЕНЕРАТОРОВ И УСТРОЙСТВ С ЛОПАСТЯМИ ВИНТОВ | 2010 |
|
RU2451828C2 |
| Способ контроля целостности лопастей несущих винтов вертолёта в соосной схеме их расположения и устройство для его осуществления | 2017 |
|
RU2700535C2 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2022 |
|
RU2779329C1 |
| Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты "воздух - воздух" при её самонаведении на вертолет и постановке им уводящих по дальности и скорости помех | 2024 |
|
RU2835459C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| БОРТОВАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА | 2010 |
|
RU2439584C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2021 |
|
RU2762522C1 |
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
Изобретение относится к области авиастроения и может быть использовано при создании вертолетов с соосным расположением винтов. Система содержит группу передатчиков, блок анализа, группу приемников. Выходы приемников подключены к первой группе информационных входов блока анализа. Выход блока анализа через бортовой вычислитель соединен с органами управления и/или индикации вертолета. Вторая группа информационных входов блока анализа соединена с соответствующей группой выходов бортового вычислителя. Технический результат заключается в повышении безопасности вертолета. 2 з.п. ф-лы, 3 ил.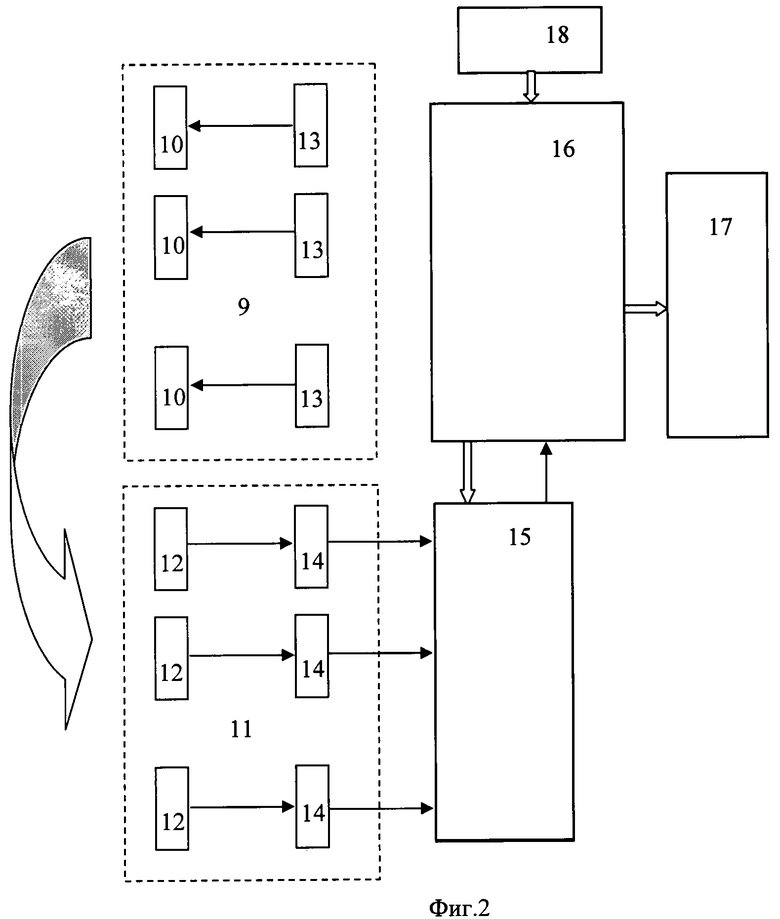
1. Система обеспечения безопасности вертолета в критических режимах, содержащая группу передатчиков, отличающаяся тем, что она снабжена блоком анализа и группой приемников, выходы которых подключены к первой группе информационных входов блока анализа, выход которого через бортовой вычислитель соединен с органами управления и/или индикации вертолета, причем вторая группа информационных входов блока анализа соединена с соответствующей группой выходов бортового вычислителя.
2. Система по п.1, отличающаяся тем, что группы передатчиков и приемников могут быть расположены на одном и другом соосных винтах вертолета.
3. Система по п.1, отличающаяся тем, что группы передатчиков и приемников, размещенных на элементах конструкции вертолета, образуют многосвязную систему регистрации отклонения пространственного положения элементов конструкции от нормального.
| RU 2001115439 A1, 27.06.2003 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ЛОПАСТЕЙ ВРАЩАЮЩЕГОСЯ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2000 |
|
RU2180122C2 |
| DE 3328340 A1, 14.02.1985 | |||
| US 6448924 B1, 10.09.2002. | |||

