Настоящее изобретение относится к способу и устройству для управления по тангажу летательным аппаратом, в частности транспортным летательным аппаратом.
Точнее, целью настоящего изобретения является коррекция явления кабрирования, которое проявляется в самопроизвольном переходе летательного аппарата на кабрирование.
Известно, что момент тангажа летательного аппарата зависит от плеча рычага между центром тяжести летательного аппарата (точкой приложения веса) и центром подъемной силы летательного аппарата (точкой приложения подъемной силы). На статически устойчивом летательном аппарате центр подъемной силы находится позади центра тяжести. Однако в зависимости от числа Маха (М) летательного аппарата и величины угла атаки, возможен срыв потока на законцовке крыла. Тогда коэффициент подъемной силы летательного аппарата имеет тенденцию немного снижаться, но при простом смещении центра подъемной силы летательного аппарата намного дальше вперед абсолютное значение момента тангажа заметно уменьшается, поскольку оно обычно непосредственно связано с длиной вышеупомянутого плеча рычага. Восстанавливающий момент для восстановления летательного аппарата до установки угла атаки моментально уменьшается. Тогда управление летательным аппаратом становится намного более трудным и колебания угла гасятся слабее. В таком случае имеет место вышеупомянутое явление кабрирования.
Для коррекции данной неустойчивости (или кабрирования) на практике обычно принято дополнять закон управления по тангажу законом коррекции кабрирования, который добавляют, возможно, для улучшения поведения летательного аппарата в данной фазе неустойчивости (при полете) с помощью попытки релинеаризовать изменение момента тангажа в виде функции угла атаки. Настраивать вышеописанный закон коррекции кабрирования, в общем, очень трудно, поскольку он является следствием компромисса между работой стандартного закона управления и работой настоящего добавленного закона коррекции, который добивается восстановления вышеупомянутой линейности. При подобной коррекции поведение летательного аппарата обычно отличается от поведения, которое он показывал до возникновения явления кабрирования, например, демпфирование сильнее, но скорость намного меньше и больше инерция при маневрах.
Поэтому законы коррекции кабрирования упомянутого выше стандартного типа не совсем удовлетворительны.
Целью настоящего изобретения является устранение данных недостатков. Изобретение относится к такому способу управления летательным аппаратом, в частности транспортным летательным аппаратом, по тангажу, который производит эффективную коррекцию явления кабрирования вышеупомянутого типа.
Для этой цели в соответствии с изобретением предложен способ, в соответствии с которым автоматически и с периодическим повторением выполняется следующая серия последовательных этапов:
a) учитывается регулируемый коэффициент NZc перегрузки;
b) оценивается коэффициент NZcg перегрузки, применимый к летательному аппарату;
c) вычисляется команда управления путем учета, по меньшей мере, следующего основного выражения:
K1·NZc+K2·NZcg,
где K1 и K2 являются двумя заданными величинами коэффициентов усиления; и
d) данная команда управления передается в средство для отклонения, по меньшей мере, одного руля летательного аппарата, при этом упомянутое отклоняющее средство формирует команду отклонения, характерную для упомянутой команды управления, и передает ее по меньшей мере в один привод упомянутого руля,
отличающийся тем, что перед упомянутым этапом
с) дополнительно, автоматически и с периодическим повторением, выполняется следующая серия последовательных этапов:
- определяется фактическое число Маха летательного аппарата;
- определяется фактический угол атаки летательного аппарата;
- упомянутый фактический угол атаки сравнивается с опорным значением угла атаки; и
- если упомянутый фактический угол атаки больше, чем упомянутое опорное значение, определяется модифицированная величина ΔK2 коэффициента усиления с помощью упомянутого фактического числа Маха и упомянутого фактического угла атаки, причем упомянутая модифицированная величина ΔK2 коэффициента усиления заменяет упомянутую величину K2 коэффициента усиления в вычислении упомянутой команды управления на упомянутом этапе c).
Таким образом, согласно изобретению закон коррекции не добавляется к стандартному закону управления (представленному вышеупомянутым основным выражением), но в данном законе управления модифицируется коэффициент усиления обратной связи по коэффициенту перегрузки в виде функции угла атаки и числа Маха летательного аппарата, чтобы противодействовать влиянию явления кабрирования. Благодаря этому, в частности, динамический диапазон, который летательный аппарат имел в замкнутом контуре в линейной области, можно поддерживать в области, в которой возникает упомянутое явление кабрирования, и, следовательно, возможно восстановление номинальной характеристики закона управления в данной сильно нелинейной области.
В предпочтительном варианте упомянутое опорное значение угла атаки определяется с помощью упомянутого фактического числа Маха летательного аппарата.
Следует отметить, что настоящее изобретение применимо к любому стандартному закону управления, который содержит обратную связь по коэффициенту перегрузки (а именно, по коэффициенту NZcg перегрузки).
В конкретном варианте осуществления дополнительно выполняются следующие операции:
- оценивается угловая скорость q тангажа, применимая к летательному аппарату;
- оценивается интегральное значение INZ коэффициента перегрузки, применимого к летательному аппарату; и
- упомянутая на этапе c) команда управления вычисляется путем учета в упомянутом основном выражении следующего вспомогательного выражения:
K3·q+K4·INZ,
где K3 и K4 являются двумя заданными величинами коэффициентов усиления.
Поэтому настоящее изобретение относится также к закону управления, содержащему дополнительно к обратной связи по коэффициенту перегрузки обратную связь по угловой скорости тангажа и интегральную обратную связь по коэффициенту перегрузки.
В последнем случае упомянутая модифицированная величина ΔK2 коэффициента усиления предпочтительно удовлетворяет следующему выражению:
ΔK2=[m·g·K5·(α-α0)]/[S·Pdyn·Czα]
в котором:
- m означает массу летательного аппарата;
- g означает ускорение силы тяжести;
- K5 и Czα являются двумя переменными параметрами, зависимыми от фактического числа Маха;
- α означает упомянутый фактический угол атаки;
- α0 означает упомянутый опорный угол атаки;
- S означает расчетную площадь крыла летательного аппарата; и
- Pdyn означает динамическое давление.
Следовательно, модификация величины коэффициента усиления основана на аэродинамических коэффициентах (которые входят в вычисление ΔK2) и использует, в частности, динамическое давление Pdyn, которое учитывает влияние скорости.
Настоящее изобретение относится также к устройству для управления летательным аппаратом по тангажу, которое обеспечивает противодействие, при необходимости, явлению кабрирования вышеупомянутого типа.
В соответствии с изобретением упомянутое устройство управления, относящееся к типу устройств, содержащих:
- средство для получения регулируемого коэффициента NZc перегрузки;
- средство для оценки коэффициента NZcg перегрузки, применимого к летательному аппарату; и
- вычислительное средство для вычисления команды управления (в соответствии со стандартным законом управления) путем учета, по меньшей мере, следующего основного выражения:
K1·NZc+K2·NZcg,
где K1 и K2 являются двумя заданными величинами коэффициентов усиления,
причем данная команда управления передается в средство для отклонения, по меньшей мере, одного руля летательного аппарата, причем упомянутое отклоняющее средство формирует команду отклонения, характерную для упомянутой команды управления, и передает ее по меньшей мере в один привод упомянутого руля,
отличается тем, что данное устройство дополнительно содержит:
- средство для определения фактического числа Маха летательного аппарата;
- средство для определения фактического угла атаки летательного аппарата;
- средство для сравнения упомянутого фактического угла атаки с опорным значением угла атаки; и
- средство для определения модифицированной величины ΔK2 коэффициента усиления с помощью упомянутого фактического числа Маха и упомянутого фактического угла атаки, если упомянутый фактический угол атаки больше, чем упомянутое опорное значение, при этом упомянутая модифицированная величина ΔK2 коэффициента усиления заменяет упомянутую величину K2 коэффициента усиления в вычислении упомянутой команды управления, выполняемом упомянутым вычислительным средством.
В связи с этим целью настоящего изобретения является адаптация коэффициента усиления обратной связи (применительно к коэффициенту NZcg перегрузки) стандартного закона управления к явлению нелинейного кабрирования.
В конкретном варианте осуществления:
- устройство управления в соответствии с изобретением дополнительно содержит:
- средство для оценки угловой скорости тангажа q, применимой к летательному аппарату; и
- средство для оценки интегрального значения INZ коэффициента перегрузки, применимого к летательному аппарату; при этом
- упомянутое вычислительное средство сформировано так, чтобы вычислять упомянутую команду управления путем учета в упомянутом основном выражении следующего вспомогательного выражения:
K3·q+K4·INZ,
где K3 и K4 являются двумя заданными величинами коэффициентов усиления.
Настоящее изобретение относится также к системе для управления летательным аппаратом, которая содержит:
- средство для формирования регулируемого коэффициента перегрузки;
- устройство управления типа вышеописанного устройства для формирования команды управления с помощью упомянутого регулируемого коэффициента перегрузки и
- средство отклонения, которое формирует команду отклонения, по меньшей мере, одного руля летательного аппарата с помощью упомянутой команды управления и которое передает данную команду отклонения по меньшей мере в один привод упомянутого руля.
В предпочтительном варианте упомянутое средство для формирования регулируемого коэффициента перегрузки содержит, в стандартном исполнении, автопилот и/или устройство ручки управления.
Кроме того, в конкретном варианте осуществления упомянутое устройство управления встроено в автопилот летательного аппарата.
Фигуры на прилагаемых чертежах объясняют осуществление изобретения. На данных фигурах одинаковые позиции обозначают одинаковые элементы.
Фиг.1 - принципиальная схема устройства в соответствии с изобретением.
Фиг.2 - график, позволяющий описать зону, в которой начинает действовать коррекция, выполняемая устройством в соответствии с изобретением.
Фиг.3-4 - схематичные изображения конкретных вариантов осуществления специальных характеристик устройства в соответствии с изобретением.
Устройство 1 в соответствии с изобретением, схематически представленное на фиг.1, предназначено для определения команд управления по тангажу для летательного аппарата (не показан), в частности транспортного летательного аппарата. Поэтому данное устройство 1 составляет часть стандартной системы 2 управления.
Упомянутая система 2 управления, которая предназначена, в частности, для управления летательным аппаратом по тангажу, содержит:
- нижеописанное средство 3 для формирования регулируемого коэффициента NZc перегрузки;
- упомянутое устройство 1 управления, которое соединено линией 4 связи с упомянутым средством 3 и функцией которого является формирование нижеописанной команды управления с помощью регулируемого коэффициента NZc перегрузки, полученного из упомянутого средства 3; и
- средство 5 отклонения, которое соединено линией 6 связи с упомянутым устройством 1 управления и которое формирует с помощью команды управления, полученной из упомянутого устройства 1, команды отклонения, по меньшей мере, одного руля 7 летательного аппарата, в частности руля высоты. Данное средство 5 отклонения передает данную команду отклонения по линии 8 связи стандартным методом, по меньшей мере, в один привод 9 упомянутого руля 7.
Кроме того, упомянутое устройство 1 управления относится к типу устройств, содержащих:
- средство, в частности линию 4 связи, которое дает возможность получения регулируемого коэффициента NZc перегрузки;
- набор 10 источников информации с обратной связью, который содержит, в частности, средство 11 для оценки коэффициента NZcg перегрузки, применимого к летательному аппарату; и
- вычислительное средство 12 для вычисления команды управления в соответствии с законом управления путем учета, по меньшей мере, следующего основного выражения (1):
K1·NZc+K2·NZcg,
где K1 и K2 являются двумя заданными величинами коэффициентов усиления.
В соответствии с изобретением упомянутое устройство 1 разработано так, чтобы допускать осуществление эффективной коррекции явления кабрирования летательного аппарата. Данное явление кабрирования имеет место, когда фактический угол атаки летательного аппарата выше опорного значения α0 угла атаки, представленного графиком на фиг.2, который показывает изменение момента Cm тангажа летательного аппарата относительно его центра тяжести в виде функции от упомянутого фактического угла α атаки. В зоне Z1, соответствующей значениям углов атаки меньше опорного значения α0, имеет место нормальное линейное поведение летательного аппарата. Кроме того, область кабрирования, которая является сильно нелинейной областью, обозначена как зона Z2, которая соответствует значениям углов атаки выше α0.
Соответственно, упомянутое устройство 1 дополнительно содержит в соответствии с изобретением:
- средство 13 для определения стандартным методом фактического числа Маха летательного аппарата;
- средство 14 для определения также стандартным методом фактического угла α атаки летательного аппарата;
- средство 15 для сравнения упомянутого фактического угла α атаки, полученного из средства 14, с опорным значением α0 угла атаки, которое может изменяться, как описано ниже; и
- средство 16, которое соединено линией 17 связи с упомянутым средством 15, для определения модифицированной величины ΔK2 коэффициента усиления, как только упомянутое средство 15 указывает, что фактический угол α атаки больше, чем упомянутое опорное значение α0, то есть как только летательный аппарат оказывается в области Z2 кабрирования. Упомянутое средство 16 вычисляет упомянутую модифицированную величину ΔK2 коэффициента усиления с помощью упомянутого фактического числа Маха, полученного из упомянутого средства 13, и упомянутого фактического угла α атаки, полученного из упомянутого средства 14, и передает (по линии 27 связи) вычисленную таким образом модифицированную величину ΔK2 коэффициента усиления в упомянутое вычислительное средство 12, которое заменяет упомянутую величину K2 коэффициента усиления данной модифицированной величиной ΔK2 коэффициента усиления в вышеупомянутом основном выражении (1).
Кроме того, упомянутое средство 15 определяет упомянутое опорное значение α0 угла атаки стандартным методом с помощью фактического числа Маха, полученного из упомянутого средства 13.
Следует отметить, что настоящее изобретение применимо к любому стандартному закону управления, который содержит обратную связь по коэффициенту перегрузки (а именно, по упомянутому коэффициенту NZcg перегрузки). Таким образом, согласно изобретению закон коррекции не добавляется к стандартному закону управления (представленному вышеупомянутым основным выражением (1)), но в данном законе управления модифицируется коэффициент ΔK2 усиления обратной связи по коэффициенту N2cg перегрузки в виде функции фактического угла α атаки и фактического числа Маха летательного аппарата, чтобы противодействовать влиянию упомянутого явления кабрирования. Благодаря этому, в частности, динамический диапазон, который летательный аппарат имел в замкнутом контуре в линейной области Z1, можно поддерживать в области Z2, в которой возникает упомянутое явление кабрирования, и, следовательно, возможно восстановление номинальной характеристики закона управления в данной сильно нелинейной области.
В конкретном варианте осуществления, представленном на фиг.3, упомянутое средство 3 для формирования регулируемого коэффициента NZc перегрузки содержит в стандартном исполнении автопилот 18, который выдает первый регулируемый коэффициент NZd перегрузки, и стандартное устройство 19 ручки управления, которое содержит ручку управления, которой может управлять пилот, и которое выдает второй регулируемый коэффициент NZc2 перегрузки, а также вычислительное средство 20, которое соединено линиями 21 и 22 связи, соответственно, с упомянутым автопилотом 18 и упомянутым устройством 19 и которое суммирует два регулируемых коэффициента NZd и NZc2 перегрузки для получения упомянутого регулируемого коэффициента NZc перегрузки, который передается в устройство 1 по линии 4 связи.
Кроме того, в конкретном варианте осуществления:
- вычислительное средство 12 и средства 15 и 16 объединены в центральном процессоре 23;
- средства 13 и 14 объединены в наборе 24 информационных источников, который соединен линией 25 связи с упомянутым центральным процессором 23; и
- упомянутый набор 10 информационных источников соединен линией 26 с упомянутым центральным процессором 23.
Кроме того, в конкретном варианте осуществления упомянутое устройство 1 управления встроено в автопилот летательного аппарата.
Следует отметить, что настоящее изобретение относится также к закону управления, содержащему, в дополнение к обратной связи по коэффициенту NZcg перегрузки, обратную связь по угловой скорости q тангажа и обратную связь по интегральному значению INZ коэффициента перегрузки.
Для данной цели, как показано на фиг.4, упомянутый набор 10 содержит, в дополнение к упомянутому средству 11:
- средство 28 для оценки угловой скорости q тангажа, применимой к летательному аппарату; и
- средство 29 для оценки интегрального значения INZ коэффициента перегрузки, применимого к летательному аппарату.
В данном случае упомянутое вычислительное средство 12 сформировано так, чтобы вычислять упомянутую команду управления путем учета в упомянутом основном выражении (1) следующего вспомогательного выражения (2):
K3·q+K4·INZ,
где K3 и K4 являются двумя заданными величинами коэффициентов усиления.
Кроме того, в данном случае упомянутое средство 16 определяет упомянутую модифицированную величину ΔK2 коэффициента усиления непосредственно из следующего выражения (3):
ΔK2=[m·g·K5·(α-α0)]/[S·Pdyn·Czα]
в котором:
- m означает массу летательного аппарата;
- g означает ускорение силы тяжести;
- K5 и Czα являются двумя переменными параметрами, зависящими от фактического числа Маха. К α0 относится то же самое, что указано выше. В предпочтительном варианте данные параметры α0, K5 и Czα задаются в форме таблиц, в виде функции упомянутого фактического числа Маха;
- S означает расчетную площадь крыла летательного аппарата; и
- Pdyn означает динамическое давление.
Ниже описан способ, по которому получено данное выражение (3) для модифицированной величины ΔK2 коэффициента усиления. Для этого применяют, в частности, следующие обозначения:
- K1, K2, K3 и K4: вышеупомянутые величины коэффициентов усиления, а именно, соответственно, для NZc и обратных связей по NZcg, q и INZ;
- Nz: изменение коэффициента вертикальной перегрузки относительно значения в устойчивом состоянии;
- q: угловая скорость тангажа;
- α: угол атаки;
- δq: элемент управления по тангажу (стабилизатор);
- Xf, Xg: соответствующие координаты, в метрах, центра подъемной силы и центра тяжести по продольной оси летательного аппарата;
- Cm: момент тангажа летательного аппарата относительно центра тяжести;
- Cmαi: момент тангажа для угла αi атаки;
- Czα: коэффициент подъемной силы летательного аппарата. Подъемная сила Cz получается из выражения Cz=Czα·α+Czα0, где Czα0 является заданным параметром;
- Czδq: коэффициент подъемной силы стабилизатора;
- Va: аэродинамическая скорость летательного аппарата;
- g: ускорение силы тяжести;
- B: инерция тангажа летательного аппарата;
- Lcma: средняя аэродинамическая хорда;
- S: площадь крыла летательного аппарата;
- ρ: аэродинамический коэффициент;
- D: расстояние между центром подъемной силы и центром тяжести летательного аппарата; и
- Pdyn: динамическое давление.
Известно, что уравнения, обуславливающие динамический диапазон летательного аппарата, являются уравнениями разомкнутой системы (в настоящем представлении значение α является отклонением угла атаки от устойчивого состояния):

 при использовании отношения
при использовании отношения
Уравнение для замкнутой системы имеет вид:


Знаменатель двух данных последних уравнений можно также записать путем обозначения расположения полюса функции замкнутой системы:
 или же
или же

Коэффициент Cmα входит в данную модель только в члене mα посредством зависимости:

При реалистическом допущении в данном законе - только нелинейная эволюция члена Cmα в области Z2 кабрирования влияет на деградацию поведения летательного аппарата из-за быстрого изменения плеча [Xf-Xg] рычага. Эволюция члена Czα пренебрежимо мала.
В данных условиях, чтобы поддерживать искомый динамический диапазон летательного аппарата в присутствии явления кабрирования, и в предположении, что коэффициент mα изменился на Δmα, необходимо и достаточно модифицировать коэффициент K2 усиления на следующую величину ΔK2:
Сохраняются следующие зависимости:


 , которая остается почти постоянной
, которая остается почти постоянной

Данные уравнения дают зависимость:
Кроме того, приняты к сведению следующие два очень реалистичных физических допущения:
1/ когда α превосходит значение α0, Cmα, которое было до сих пор постоянным (обозначено Cmα0), начинает изменяться пропорционально (α-α0), пока не становится слишком большим
Cmα (α>α0)=Cmα0+k. (α-α0), где k является постоянным коэффициентом; и
2/ Cmδq является простой функцией числа Маха.
Тогда получается нижеследующая окончательная зависимость (вышеупомянутое выражение (3)), дающая модифицированное отклонение ΔK2 коэффициента усиления, для α>α0 (и угле α0, зависящем от числа Маха):
ΔK2=[m·g·K5·(α-α0)]/[S·Pdyn·Czα],
в котором Czα и K5 изменяются в зависимости от числа Маха.
Кроме того, что касается наиболее общего варианта осуществления, который включает в себя только обратную связь по коэффициенту NZcg перегрузки, известно, что передаточная функция замкнутой системы может быть записана в виде:

K2 появляется в знаменателе данной передаточной функции замкнутой системы только в одном члене, и каждый раз в следующей форме:
В данной формуле член R является общим способом обозначения элементов, которые не зависят ни от mα, ни от K2.
Модифицированную величину ΔK2 коэффициента усиления (в общем случае, с обратной связью только по NZcg) можно определить из последних выражений с использованием метода, аналогичного методу вычисления, показанному выше в связи с одновременной обратной связью по INZ, q и NZcg.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ, УПРАВЛЯЮЩАЯ РУЛЯМИ ВЫСОТЫ ВОЗДУШНОГО СУДНА | 2005 |
|
RU2335007C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2241642C2 |
| Способ и устройство для защиты максимальной подъемной силы воздушного судна | 2016 |
|
RU2731194C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2341775C1 |
| СПОСОБ И УСТРОЙСТВО ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ОПТИМИЗИРУЮЩИЕ УПРАВЛЕНИЕ ЭЛЕРОНАМИ В КОНФИГУРАЦИИ С УВЕЛИЧЕННОЙ ПОДЪЕМНОЙ СИЛОЙ | 2007 |
|
RU2389645C1 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
Изобретение относится к области приборостроения и может быть использовано для управления летательными аппаратами (ЛА). Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство (1) содержит средство (4) для получения затребованного коэффициента (NZc перегрузки); средство (11) для оценки коэффициента (NZcg) перегрузки; средство (13) для вычисления команды управления; средство (5) для отклонения управляющей поверхности (7) летательного аппарата в функциональной зависимости от параметров навигации ЛА. 6 н. и 7 з.п. ф-лы, 4 ил.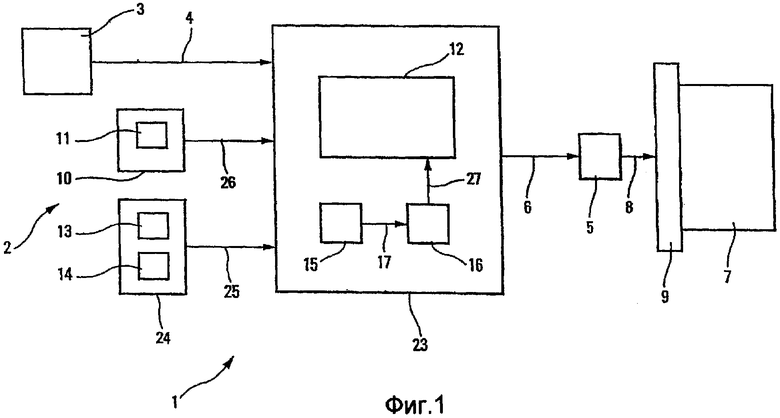
1. Способ управления летательным аппаратом по тангажу, в котором автоматически и с периодическим повторением выполняется следующая серия последовательных этапов:
a) учитывается регулируемый коэффициент NZc перегрузки;
b) оценивается коэффициент NZcg перегрузки, применимый к летательному аппарату;
c) вычисляется команда управления путем учета, по меньшей мере, следующего основного выражения:
K1·NZc+K2·NZcg,
где К1 и К2 являются двумя заданными величинами коэффициентов
усиления; и
d) данная команда управления передается в средство (5) отклонения, по меньшей мере, одного руля (7) летательного аппарата, причем упомянутое отклоняющее средство (5) формирует команду отклонения, характерную для упомянутой команды управления, и передает ее, по меньшей мере, в один привод (9) упомянутого руля (7),
причем перед упомянутым этапом с) дополнительно автоматически и с периодическим повторением выполняют следующую серию последовательных этапов:
определения фактического числа Маха летательного аппарата;
определения фактического угла атаки летательного аппарата;
сравнение упомянутого фактического угла атаки с опорным значением угла атаки; причем
если упомянутый фактический угол атаки больше, чем упомянутое опорное значение, определяют модифицированную величину ΔК2 коэффициента усиления с учетом упомянутого фактического числа Маха и упомянутого фактического угла атаки, причем упомянутой модифицированной величиной ΔК2 коэффициента усиления заменяют упомянутую величину К2 коэффициента усиления в вычислении упомянутой команды управления на упомянутом этапе с).
2. Способ по п.1, в котором упомянутое опорное значение угла атаки определяют с учетом упомянутого фактического числа Маха.
3. Способ по п.1, в котором дополнительно:
оценивают угловую скорость q тангажа, применимую к летательному аппарату;
оценивают интегральное значение INZ коэффициента перегрузки, применимого к летательному аппарату; и
на этапе с) упомянутую команду управления вычисляют путем учета в упомянутом основном выражении следующего вспомогательного выражения:
K3·q+K4·INZ,
где К3 и К4 являются двумя заданными величинами коэффициентов усиления.
4. Способ по п.3, в котором упомянутая модифицированная величина ΔК2 коэффициента усиления удовлетворяет следующему выражению:
ΔK2=[m·g·K5·(α-α0)]/[S·Pdyn·Czα],
в котором
m означает массу летательного аппарата;
g означает ускорение силы тяжести;
К5 и Czα являются двумя переменными параметрами, зависящими от фактического числа Маха;
α означает упомянутый фактический угол атаки;
α0 означает упомянутый опорный угол атаки;
S означает расчетную площадь крыла летательного аппарата; и
Pdyn означает динамическое давление.
5. Устройство для управления летательным аппаратом по тангажу, при этом упомянутое устройство (1) содержит:
средство (4) для получения регулируемого коэффициента NZc перегрузки;
средство (11) для оценки коэффициента NZcg перегрузки, применимого к летательному аппарату; и
вычислительное средство (12) для вычисления команды управления путем учета, по меньшей мере, следующего основного выражения: K1·NZc+K2·NZcg,
где К1 и К2 являются двумя заданными величинами коэффициентов усиления,
причем данная команда управления передается в средство (5) отклонения, по меньшей мере, одного руля (7) летательного аппарата, причем упомянутое отклоняющее средство (5) формирует команду отклонения, характерную для упомянутой команды управления, и передает ее в, по меньшей мере, один привод (9) упомянутого руля (7),
при этом данное устройство дополнительно содержит:
средство (13) для определения фактического числа Маха летательного аппарата;
средство (14) для определения фактического угла атаки летательного аппарата;
средство (15) для сравнения упомянутого фактического угла атаки с опорным значением угла атаки; и
средство (16) для определения модифицированной величины ΔК2 коэффициента усиления с учетом упомянутого фактического числа Маха и упомянутого фактического угла атаки, если упомянутый фактический угол атаки больше, чем упомянутое опорное значение, при этом упомянутая модифицированная величина ΔК2 коэффициента усиления заменяет упомянутую величину К2 коэффициента усиления в вычислении упомянутой команды управления, выполняемом упомянутым вычислительным средством (12).
6. Устройство по п.5, при этом упомянутое устройство (1) дополнительно содержит:
средство (28) для оценки угловой скорости тангажа q, применимой к летательному аппарату; и
средство (29) для оценки интегрального значения INZ коэффициента перегрузки, применимого к летательному аппарату; и
упомянутое вычислительное средство (12) сформировано так, чтобы вычислять упомянутую команду управления путем учета в упомянутом основном выражении следующего вспомогательного выражения:
K3·q+K4·INZ,
где К3 и К4 являются двумя заданными величинами коэффициентов усиления.
7. Система для управления летательным аппаратом, содержащая:
средство (3) для формирования регулируемого коэффициента перегрузки;
устройство (1) управления по п.5 для формирования команды управления с помощью упомянутого регулируемого коэффициента перегрузки; и
средство (5) отклонения, которое формирует команду отклонения, по меньшей мере, одного руля (7) летательного аппарата с помощью упомянутой команды управления и которое передает данную команду отклонения по меньшей мере, в один привод (9) упомянутого руля (7).
8. Система по п.7, в которой упомянутое средство (3) для формирования регулируемого коэффициента перегрузки содержит автопилот (18).
9. Система по 7, в которой упомянутое средство (3) для формирования регулируемого коэффициента перегрузки содержит устройство (19) ручки управления.
10. Система по 7, в которой упомянутое устройство (1) управления встроено в автопилот.
11. Летательный аппарат содержит устройство (1) для реализации способа по п.1.
12. Летательный аппарат содержит устройство (1) по п.5.
13. Летательный аппарат содержит систему (1) по п.7.
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов | |||
| Под ред | |||
| Г.С.Бюшгенса | |||
| - М.: Наука | |||
| Физматлит, 1998, с.443 | |||
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕНАСТРОЙКОЙ КООРДИНАТ | 1995 |
|
RU2145725C1 |
| Лебедев А.А., Чернобровкин Л.С | |||
| Динамика полета беспилотных летательных аппаратов | |||
| - М.: Машиностроение, 1973, с.486 | |||
| Михалев И.А | |||
| и др | |||
| Системы автоматического | |||

