Изобретение относится к области железнодорожной автоматики и телемеханики, а именно к системам управления движением поездов, и может быть использовано для повышения достоверности определения местоположения поезда на маршруте движения.
Известна система управления движением поездов, в которой для определения местоположения поезда на маршруте движения на борту каждого локомотива установлен опросный узел, включающий приемопередатчик сигналов от путевых приемоответчиков (бализов) и блок измерения скорости, связанный с блоком электронной карты маршрута движения поезда. В момент прохождения над бализами происходит уточнение текущей координаты места нахождения поезда на маршруте, увязанное с электронной картой маршрута (журнал «Железные дороги мира», №2, 2007, с.64).
Недостаток вышеуказанной системы управления движением заключается в необходимости дополнительной путевой и локомотивной аппаратуры (радиоблок-центры, ретрансляторы, евробализы, радары акселерометры и т.д.) как на грузонапряженных, так и на малодеятельных линиях. В связи с этим использование таких систем требует значительных капитальных вложений.
В качестве прототипа выбрана система управления движением поездов, содержащая в передней и задней кабинах управления поездом, соответственно, комплекты устройств единой комплексной системы управления и безопасности движения поезда (ЕКС), каждый из которых содержит связанные через соответствующие CAN интерфейсы своих кабин управления поездом подсистемы контроля безопасности движения, автоматического управления служебным торможением и автоведения, при этом подсистема контроля безопасности движения состоит из подключенных к CAN интерфейсу своей кабины управления поездом приемника системы спутниковой навигации, модуля электронной карты маршрута, модуля измерения пройденного пути и модуля памяти физических параметров поезда (RU 2355596, B61L 3/00, 20.05.09).
Аппаратура каждой кабины используется для интервального регулирования тогда, когда кабина является первой кабиной управления, по ходу движения поезда.
Известная система управления движением поезда не обладает достаточной надежностью работы в наиболее оптимальном режиме ведения поезда с использованием непрерывного отслеживания координаты его места нахождения по электронной карте маршрута. Это связано как с накоплением ошибки в модуле измерения пройденного пути из-за износа, буксования и юза колес локомотива, связанных с колесными датчиками импульсов, так и из-за сбоев в работе приемника системы спутниковой навигации. Сбои в работе приемника системы спутниковой навигации могут быть обусловлены потерей видимости достаточного количества навигационных спутников в местностях со сложным рельефом, а также большим уровнем электромагнитных помех, например, в местах пересечения железнодорожной линии с трассами высоковольтных линий электропередач. Сбои приводят к расхождению в измерении текущей координаты и координаты, отслеживаемой по электронной карте маршрута. В условиях появления значительных расхождений система управления поездом переходит на менее эффективное регулирование движения (только по сигналам АЛСН) с определением местоположения поезда с точностью до блокучастков автоблокировки.
Технический результат изобретения заключается в повышении надежности работы в режиме управления движением поезда по электронной карте маршрута.
Технический результат достигается тем, что в системе управления движением поезда, содержащей в передней и задней кабинах управления поездом соответствующие комплекты устройств единой комплексной системы управления и безопасности движения поезда, каждый из которых содержит соединенные через CAN интерфейс своей кабины управления поездом подсистему автоведения, подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, состоящую из подключенных к CAN интерфейсу своей кабины управления поездом приемника спутниковой навигации, модуля электронной карты маршрута, модуля измерения пройденного пути и модуля памяти физических параметров поезда, согласно изобретению в подсистему контроля безопасности движения введен модуль коррекции текущей координаты, который первым портом подключен к CAN интерфейсу своей кабины управления поездом, через который своими вторым, третьим, четвертым и пятым портами модуль коррекции текущей координаты соединен соответственно с приемником системы спутниковой навигации, модулем электронной карты маршрута, модулем измерения пройденного пути и модулем памяти физических параметров поезда, шестой порт модуля коррекции текущей координаты соединен с блоком памяти, содержащим базу данных приращений длин и координат аппроксимирующих отрезков пути математической модели маршрута движения поезда, выход модуля коррекции текущей координаты соединен с портом управления модуля электронной карты маршрута, a CAN интерфейсы кабин управления поездом соединены между собой посредством канала защищенного цифрового обмена данными.
Каждый из приемников системы спутниковой навигации настроен на группировки навигационных спутников, различающиеся друг от друга хотя бы одним навигационным спутником.
Система управления движением поезда может быть использована в поездах, имеющих, по крайней мере, две кабины управления, например, такие как пригородные электропоезда, двухсекционные локомотивы, длинносоставные поезда, ведомые несколькими локомотивами, распределенными по длине состава.
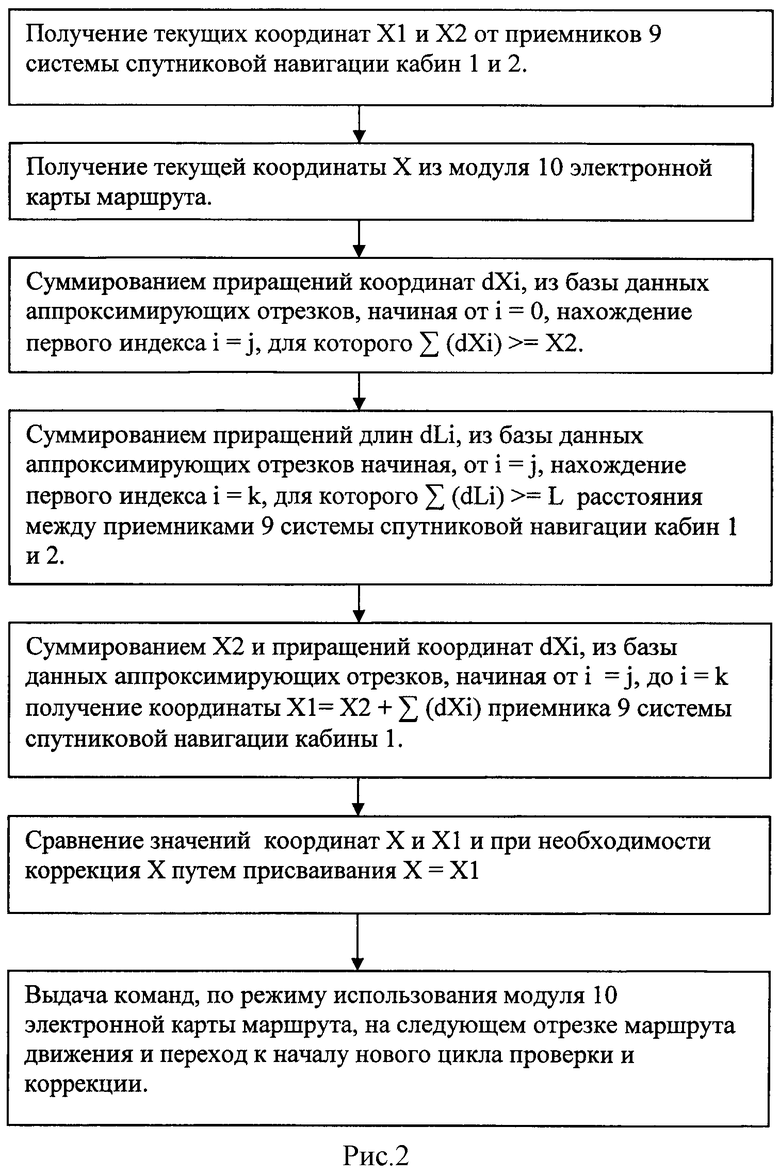
На рис.1 приведена схема системы управления движением поезда, на рис.2 приведена блок схема алгоритма работы модуля коррекции текущей координаты.
Система управления движением поезда содержит в передней и задней кабинах (1 и 2) управления поездом соответствующие комплекты (3 и 4) устройств единой комплексной системы управления и безопасности движения поезда, каждый из которых содержит соединенные через CAN интерфейс 5 своей кабины управления поездом подсистему 6 автоведения, подсистему 7 автоматического управления служебным торможением и подсистему 8 контроля безопасности движения, состоящую из подключенных к CAN интерфейсу 5 своей кабины управления поездом приемника 9 спутниковой навигации, модуля 10 электронной карты маршрута, модуля 11 измерения пройденного пути и модуля 12 памяти физических параметров поезда, в подсистеме контроля безопасности движения модуль 13 коррекции текущей координаты первым портом подключен к CAN интерфейсу 5 своей кабины управления поездом, через который своими вторым, третьим, четвертым и пятым портами модуль 13 коррекции текущей координаты соединен соответственно с приемником 9 системы спутниковой навигации, модулем 10 электронной карты маршрута, модулем 11 измерения пройденного пути и модулем 12 памяти физических параметров поезда, шестой порт модуля коррекции текущей координаты соединен с блоком 14 памяти, содержащим базу данных приращений длин и координат аппроксимирующих отрезков пути математической модели маршрута движения поезда, выход модуля 13 коррекции текущей координаты соединен с портом управления модуля 10 электронной карты маршрута, a CAN интерфейсы 5 кабин управления поездом соединены между собой посредством канала 15 защищенного цифрового обмена данными.
Система управления движением поезда функционирует следующим образом.
При движении поезда по конкретному участку дороги в подсистеме 8 контроля безопасности движения на основе данных о скоростных ограничениях, записанных в модуле 10 электронной карты маршрута этого участка, а также данных о допустимых скоростях движения, поступающих от путевых устройств АЛСН, АЛС-ЕН и из центра управления движением по радиоканалу цифровой связи (на чертеже не показано) определяются значения допустимой скорости Vд. и целевой скорости Vц. движения. Допустимая скорость является максимальной и превышение ее вызывает экстренное торможение.
При использовании электронной карты, по мере приближения локомотива к препятствию, на котором предусмотрено ограничение скорости, значение скорости Vд. постепенно снижается, в соответствии с заданной кривой торможения до значения Vц. Машинист поезда при этом должен поддерживать значение фактической скорости движения Vф.<Vд. В таком режиме движения средняя скорость движения поезда определяется препятствием на пути поезда, задающим наиболее жесткое ограничение скорости. Средняя скорость движения поезда с использованием данных электронной карты за счет возможности оптимального движения выше по сравнению со средней скоростью движения без использования данных электронной карты.
Модуль 10 электронной карты маршрута осуществляет
- запись и хранение данных электронной карты маршрута следования поезда,
- вычисление линейной железнодорожной координаты локомотива по данным модуля 11 измерения пройденного пути,
- выбор целей на пути поезда (на участке длиной 5000 м) и отслеживание их проследования головой или хвостом поезда,
- поддержка отслеживания целей до конца маршрута при выходе из электронной карты или за пределы участка, внесенного в электронную карту.
При работе подсистемы 8 контроля безопасности движения с электронной картой маршрута на дисплее (на чертеже не показан) в кабине машиниста индицируются буквы ЭК (электронная карта) в случае, если по данным из электронной карты маршрута формируется актуальное (действующее в данный период времени) ограничение скорости. После ввода номера пути на дисплее в кабине машиниста также индицируется координата пути и расстояние до препятствия.
В предлагаемой системе (по сравнению с прототипом) за счет работы модуля 13 коррекции текущей координаты коррекция координаты местонахождения производится не только в моменты проследования границы между смежными рельсовыми цепями передней частью поезда, а с более высокой периодичностью. Практически, цикл сопоставления данных о текущей координате по электронной карте маршрута и данных от приемников 9 системы спутниковой навигации занимает 3 секунды. То есть, при нормальной работе обоих приемников 9 системы спутниковой навигации корректировка координаты производится каждые 3 секунды, что предотвращает накопление ошибки. При этом соответствие данных от обоих приемников 9 характеризует их высокую достоверность, а совместное соответствие их положению поезда, отслеживаемому модулем 10 электронной карты маршрута, позволяет достигнуть уровня достоверности определения координаты местоположения начала поезда, отвечающего требованиям для основных систем, обеспечивающих безопасность движения поездов. Надежность и безопасность работы системы управления движением поезда в режиме следования по электронной карте маршрута существенно повышаются.
Повышение надежности также обусловлено мажоритарным способом принятия решения об истинном значении текущей координаты. Например, при сбое либо в модуле 10 электронной карты маршрута, либо только в одном из приемников 9 выбирается значение текущей координаты, на основании соответствия между собой двух из трех независимых ее значений. Поскольку приемники 9 существенно удалены друг от друга, вероятность их неправильной одновременной работы из-за электромагнитных помех и/или видимости недостаточного количества навигационных спутников существенно снижается. Дальнейшее повышение безопасности возможно, если каждый из приемников 9 будет настроен на группировки навигационных спутников, различающиеся хотя бы одним навигационным спутником. Это делает работу приемников 9 еще более независимой и соответствие их данных еще более достоверным событием.
В каждом цикле работы во второй порт модуля 13 коррекции текущей координаты кабины 1 поступают данные о текущей координате X1 от приемника 9 системы спутниковой навигации. В первой по ходу движения поезда кабине 1 работают все модули. Во второй кабине постоянно включены только CAN интерфейс 5 и приемник 9 системы спутниковой навигации, передающий измеренные им значения координаты X2 через CAN интерфейс 5 своей кабины, канал 15 защищенного цифрового обмена данными между кабинами 1 и 2 управления и CAN интерфейс 5 кабины 1 в первый порт модуля 13 коррекции текущей координаты. Передача данных начинается в момент получения сигнала запроса от модуля 13, синхронизирующего одновременность используемых данных, о координатах X1 и X2. Высокая надежность работы канала 15 достигается применением помехозащищенного кодирования информации и физической защитой от электромагнитных помех. Приемники 9 системы спутниковой навигации при нормальной работе выдают обновленные данные о текущей координате своего местоположения и текущем глобальном времени Т каждую секунду.
Модуль 13 коррекции текущей координаты рассчитывает координаты X1 и X2 и сравнивает их с текущей координатой X, передаваемой с выхода модуля 10 электронной карты маршрута в третий порт модуля 13. Через четвертый порт модуль 13 получает значение пройденного пути от модуля 11 измерения пройденного пути. Через пятый порт модуль 13 получает от блока 14 памяти физических параметров поезда значение L, расстояния между приемниками 9 системы спутниковой навигации первой и второй кабин (1 и 2) управления. Это значение заносится в модуль 12 памяти физических параметров поезда после каждого переформирования состава поезда и перед каждой поездкой поезда.
Синхронизированные по времени Т значения координат X1, X2 и X используются модулем 13 коррекции текущей координаты для поддержания точности отслеживания позиции поезда X при движении поезда в режиме следования по электронной карте маршрута. Три независимых значения координаты позволяют повысить защиту от сбоев в определении координаты места нахождения поезда.
Блок 14 памяти содержит математическую модель маршрута движения поезда в виде таблицы, в которой текущий маршрут движения поезда разделен на отрезки, каждому из которых соответствует запись, включающая значение индекса i, значение приращения координаты местоположения dXi и значение соответствующего приращения длины маршрута dLi. Длина отрезков выбрана равной 1 м из компромиссного условия достижения необходимой точности при разумном расходе ресурса электронной памяти и вычислительной мощности. Эта таблица в иной форме дублирует информацию, записанную во внутренней базе данных модуля 10 электронной карты маршрута.
Сопоставление результатов вычислений, производимых по разным алгоритмам с использованием разных исходных данных, обеспечивает повышение уровня достоверности контроля и повышает безопасность движения поездов.
Вначале цикла модуль 13 суммированием приращений координат dXi из базы данных (блока 14 памяти) аппроксимирующих отрезков, начиная от i=0, производит нахождение первого индекса i=j, для которого ∑(dXi)>=Х2 - текущей координаты приемника 9 системы спутниковой навигации кабины 2.
Затем суммированием приращений длин dLi из базы данных аппроксимирующих отрезков, начиная от i=j, модуль 13 находит первый индекс i=k, для которого ∑(dLi)>=L, где L - расстояние между приемниками 9 системы спутниковой навигации кабин 1 и 2.
Затем суммированием X2 с приращениями координат dXi из базы данных аппроксимирующих отрезков, начиная от i=j, до i=k осуществляется расчет текущей координаты X1=X2+∑(dXi) приемника 9 системы спутниковой навигации кабины 1.
После сравнения значений координат X и X1, при необходимости, выполняется коррекция вида X=X1 и начинается новый цикл работы модуля 13.
Если обнаружено аномально большое несоответствие всех трех данных X, X1, X2, то на выходе модуля 13 формируется команда выключения модуля 10 электронной карты маршрута через порт управления. При этом происходит временный переход на работу системы без использования режима отслеживания местоположения поезда по электронной карте маршрута. Подсистема контроля безопасности движения 8 переключается на режим движения поезда только по сигналам АЛС-ЕН и/или АЛСН до восстановления нормальной работы соответствующих модулей системы.
Предлагаемая система управления движением поезда обеспечивает высокую надежность работы в оптимальном режиме управления движением поезда. Более надежное и безопасное функционирование аппаратуры обеспечивается за счет взаимного резервирования и дублирования навигационных данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446071C1 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2010 |
|
RU2429152C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510346C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики, а именно к системам управления движением поездов, и может быть использовано для повышения достоверности определения местоположения поезда на маршруте движения. Система содержит в передней и задней кабинах управления поездом комплекты устройств единой комплексной системы управления и безопасности движения поезда, каждый из которых содержит соединенные через CAN интерфейс своей кабины управления поездом подсистему автоведения, подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, состоящую из подключенных к CAN интерфейсу своей кабины управления поездом приемника спутниковой навигации, модуля электронной карты маршрута, модуля измерения пройденного пути и модуля памяти физических параметров поезда. В подсистеме контроля безопасности движения модуль коррекции текущей координаты первым портом подключен к CAN интерфейсу своей кабины управления поездом, через который модуль коррекции текущей координаты соединен с приемником системы спутниковой навигации, модулем электронной карты маршрута, модулем измерения пройденного пути и модулем памяти физических параметров поезда. Модуль коррекции текущей координаты соединен с блоком памяти и с портом управления модуля электронной карты маршрута. CAN интерфейсы кабин управления поездом соединены между собой. Достигается повышение надежности работы в режиме управления движением поезда по электронной карте маршрута. 1 з.п. ф-лы, 2 ил.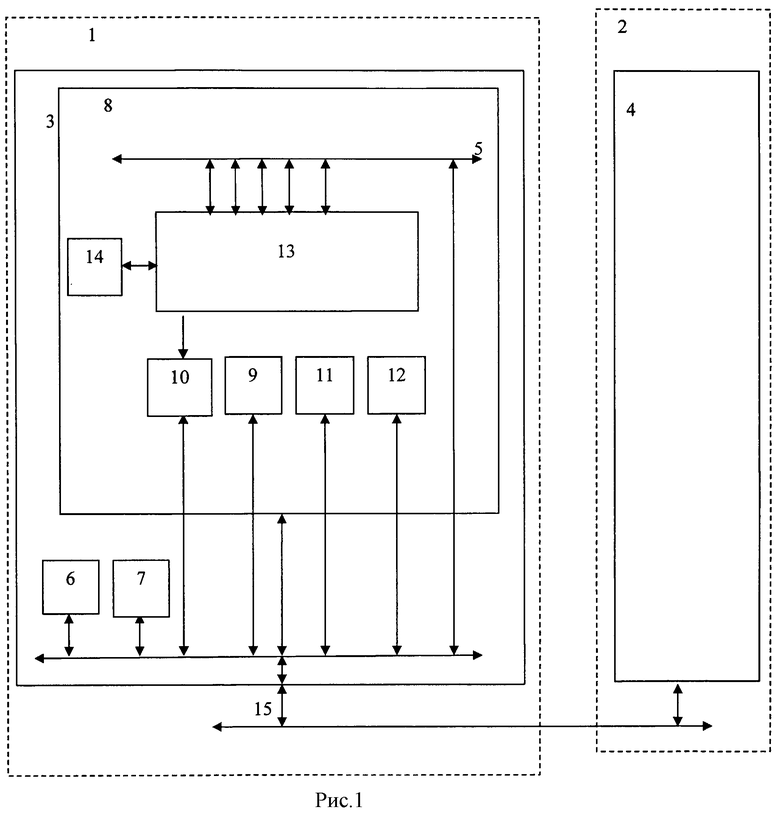
1. Система управления движением поезда, содержащая в передней и задней кабинах управления поездом соответствующие комплекты устройств единой комплексной системы управления и безопасности движения поезда, каждый из которых содержит соединенные через CAN интерфейс своей кабины управления поездом подсистему автоведения, подсистему автоматического управления служебным торможением и подсистему контроля безопасности движения, состоящую из подключенных к CAN интерфейсу своей кабины управления поездом приемника спутниковой навигации, модуля электронной карты маршрута, модуля измерения пройденного пути и модуля памяти физических параметров поезда, отличающаяся тем, что в подсистему контроля безопасности движения введен модуль коррекции текущей координаты, который первым портом подключен к CAN интерфейсу своей кабины управления поездом, через который своими вторым, третьим, четвертым и пятым портами модуль коррекции текущей координаты соединен соответственно с приемником системы спутниковой навигации, модулем электронной карты маршрута, модулем измерения пройденного пути и модулем памяти физических параметров поезда, шестой порт модуля коррекции текущей координаты соединен с блоком памяти, содержащим базу данных приращений длин и координат аппроксимирующих отрезков пути математической модели маршрута движения поезда, выход модуля коррекции текущей координаты соединен с портом управления модуля электронной карты маршрута, a CAN интерфейсы кабин управления поездом соединены между собой посредством канала защищенного цифрового обмена данными.
2. Система по п.1, отличающаяся тем, что каждый из приемников системы спутниковой навигации настроен на группировки навигационных спутников, различающиеся друг от друга хотя бы одним навигационным спутником.
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| Дозатор для сиропа | 1951 |
|
SU94943A1 |
| JP 2009280126 A, 03.12.2009 | |||
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| ЯКОРЬ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА | 0 |
|
SU166401A1 |

