Заявление о приоритете
Для настоящего изобретения испрашивается приоритет предварительной патентной заявки US 60/988460, поданной 16.11.2007.
Область техники
Изобретение в общем относится к способам регулирования нефтяных и газовых промысловых скважин. В частности, оно относится к магнитной системе датчиков положения, предназначенной для регистрации положения подвижных элементов скважинного оборудования заканчивания, используемого для регулирования дебита скважины и других параметров работы скважины.
Уровень техники
Во многих случаях желательно знать положение подвижного элемента в скважинном оборудовании. Это особенно важно для устройства регулирования дебита скважины, в котором положение подвижного элемента влияет на величину потока в скважину. Подвижные элементы в таких устройствах обычно приводятся в движение гидравлическими или электрическими средствами. Без надежной индикации положения трудно гарантировать действительное перемещение подвижного элемента в требуемое положение. В настоящем изобретении предлагается устройство надежного определения положения подвижного элемента.
В обычной интеллектуальной скважинной системе, приводимой в действие гидравлически, в скважине расположены одно или более устройства регулирования потока. Эти устройства регулирования потока приводятся в действие подачей гидравлического давления с поверхности для перемещения поршневого механизма, который в свою очередь вызывает поступательное перемещение в требуемое положение подвижного элемента или втулки. Точная установка устройства регулирования потока в заданное положение требует наличия обратной связи для получения информации о фактических координатах. При отсутствии такой обратной связи используют косвенные методы обратной связи, как это описано в патенте US 6736213, чтобы попытаться определить местоположение, однако косвенные методы обратной связи ограничены по точности. Необходим датчик фактического положения, установленный на скважинном устройстве регулирования потока, который передает данные о координатах на поверхность. В настоящем изобретении преодолевается недостаток отсутствия индикации положения или использования косвенного метода для определения положения и вводится надежная обратная связь, относящаяся к фактическому положению скважинного устройства регулирования потока. Это изобретение применимо в многочисленных скважинных устройствах, приводимых в действие механически, гидравлически или электрически.
Магнитные датчики определения положения использовали ранее, как раскрыто в патенте US 5666050. Одним из отличий такого применения является то, что регистрируется отклик на один магнит с использованием датчика, который включается и выключается. Отсутствует считывание информации с множества датчиков измерения магнитного поля, служащее для более точного определения местоположения подвижного компонента.
В патенте US 5732776, в столбце 23, строке 25 показан бесконтактный датчик, находящийся снаружи клапана, без раскрытия подробностей его конструкции и действия. В патенте US 6041857 для определения поступательного перемещения втулки используется преобразователь координат, подключенный через редуктор. Это применение ограничено клапаном, в котором для перемещения скважинного компонента не используются двигатели. Детали датчика раскрыты в столбце 9, строках 23-46. В патенте US 6334486 раскрыто использование датчиков положения, но при этом приведены несколько примеров, относящихся к линейным потенциометрам, линейным потенциометрическим преобразователям перемещения, синусно-косинусным или синхронным, предназначенным для определения положения, как показано в столбце 2, строках 43-45. Общим в этих ссылках является необходимость прикрепления датчика положения к подвижному элементу или его приводу и установки соответствующих электронных схем, взаимодействующих с датчиком, в закрытом корпусе устройства, что создает возможность искажения сигнала.
В патенте US 6848189 в общих чертах описан измерительный прибор типа нутромера, предназначенный для определения диаметра скважины в процессе каротажа. Он отличается наличием криволинейного гибкого элемента, один конец которого зафиксирован, а другой скользит в направляющей, за счет чего гибкий элемент перемещается внутрь и наружу. Датчики используются для определения положения скользящего конца элемента при его линейном перемещении в направляющей. Судя по этой информации, может быть подсчитано расстояние до самой удаленной точки криволинейного элемента.
В столбце 5, строках 20-55 описана группа датчиков. К скользящему концу криволинейного элемента прикреплен магнит, и группа магнитных датчиков, работающих на эффекте Холла, или других магнитных датчиков регистрирует перемещение магнита. Сигналы со всех датчиков группы затем используют для подсчета положения магнита центроидным методом.
Предпочтительный вариант выполнения настоящего изобретения направлен также на использование группы датчиков Холла для измерения перемещения магнита, установленного в подвижном элементе, таком как дроссельная втулка, и два или более показания датчика используются для подсчета положения магнита. Между описанным выше предпочтительным вариантом выполнения и патентом '189 существует несколько отличий. В патенте '189 описано устройство типа нутромера, предназначенное для измерения диаметра скважины в процессе каротажа. Линейные измерения представляют собой непрямой способ измерения этого диаметра. Предпочтительный вариант выполнения настоящего изобретения включает прямое измерение продольного перемещения скважинного компонента, такого как скользящая втулка или проточная труба скважинного предохранительного клапана.
В патенте '189 магнит установлен на внешнем диаметре зонда и перемещается вдоль направляющей за счет изгиба криволинейного подвижного элемента. Группа датчиков также установлена в корпусе по внешнему диаметру зонда или альтернативно герметизирована на нижнем диаметре устройства и воспринимает магнит через стенку устройства. В предпочтительном варианте выполнения настоящего изобретения магнит установлен в подвижном элементе (дроссельной втулке) на внутреннем диаметре или сбоку устройства, подвергаемого воздействию давления в насосно-компрессорной трубе. Магнит перемещается вместе со всей втулкой при изменении положения дроссельного клапана. Нет никакой направляющей. Решетка датчиков может быть герметизирована в кожухе электронного блока на наружном диаметре устройства. Магнитное поле регистрируется как через стенку кожуха, так и через корпус устройства. В альтернативных предпочтительному вариантах выполнения решетка датчиков монтируется в наружном корпусе устройства, и поле магнита регистрируется через корпус устройства. Решетка датчиков отделена от магнита корпусом устройства, так что нет необходимости в физической связи между решеткой и подвижным элементом.
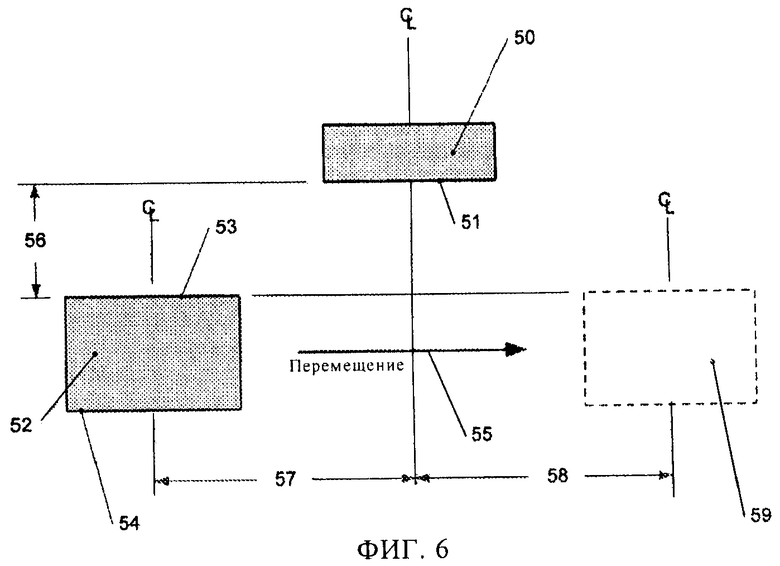
В патенте '189, в столбце 5, строках 37-42 утверждается, что при перемещении магнита он также поворачивается, и поэтому магнитное поле также меняет направление. Этот эффект нужно компенсировать при калибровке. В предпочтительном варианте выполнения настоящего изобретения магнит при своем движении предпочтительно не поворачивается и не меняет ориентацию. Ориентация северного и южного полюсов магнита предпочтительно сохраняется неизменной относительно оси устройства, как это показано на фиг.6. Компенсация поворота магнита становится ненужной.
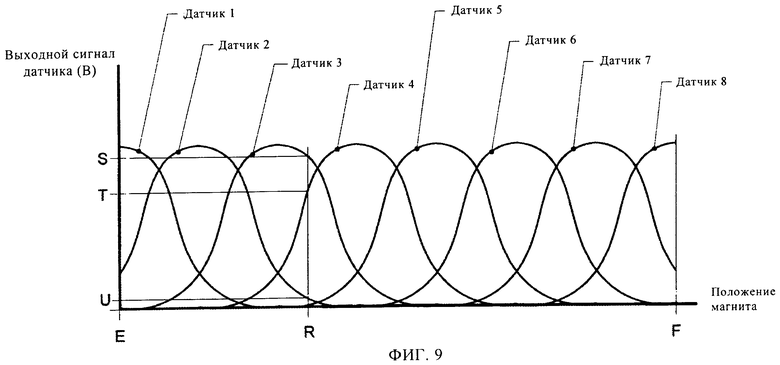
Наконец, в патенте '189 применяется "центроидный" метод подсчета положения по показаниям датчиков. Это описано в столбце 5, строки 46-53. В нем для подсчета положения используются выходные сигналы со всех датчиков решетки. В предпочтительном варианте выполнения настоящего изобретения для определения положения используется два или более датчика, причем внимание сосредоточивается только на выходных сигналах тех датчиков, которые фактически дают отклик на магнитное поле. Показания с датчиков, не регистрирующих магнитное поле, не используются. В представленном на фиг.9 примере для определения положения используются показания только датчиков 2, 3 и 4 в отличие от способа, предложенного в патенте '189, в котором должны быть использованы показания всех 8 датчиков. Например, при фактическом определении положения на поверхность должны передаваться показания только этих трех датчиков, изображенных на фиг.9, а не показания со всей решетки.
Раскрытие изобретения
Положение подвижного скважинного компонента, такого как втулка дроссельного клапана, отслеживают и определяют, используя решетку (упорядоченную группу) датчиков, предпочтительно датчиков Холла, измеряющих напряженность магнитного поля магнита, перемещающегося вместе с втулкой. Датчики измеряют напряженность поля и выдают напряжение, соотносящееся с регистрируемой напряженностью поля. Группа датчиков, показания которых можно считывать, передает сигналы в микропроцессор для непосредственного вычисления положения магнита. Датчики находятся в корпусе скважинного средства и механически не связаны с втулкой. Продольное положение втулки вычисляется непосредственно с использованием менее чем всех, доступных датчиков, что увеличивает скорость передачи данных и вычисления фактического положения с использованием известных математических методов.
Краткое описание чертежей
Далее изобретение более подробно рассмотрено со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схематически сечение части узла клапана со скользящей втулкой, включающего устройство определения положения;
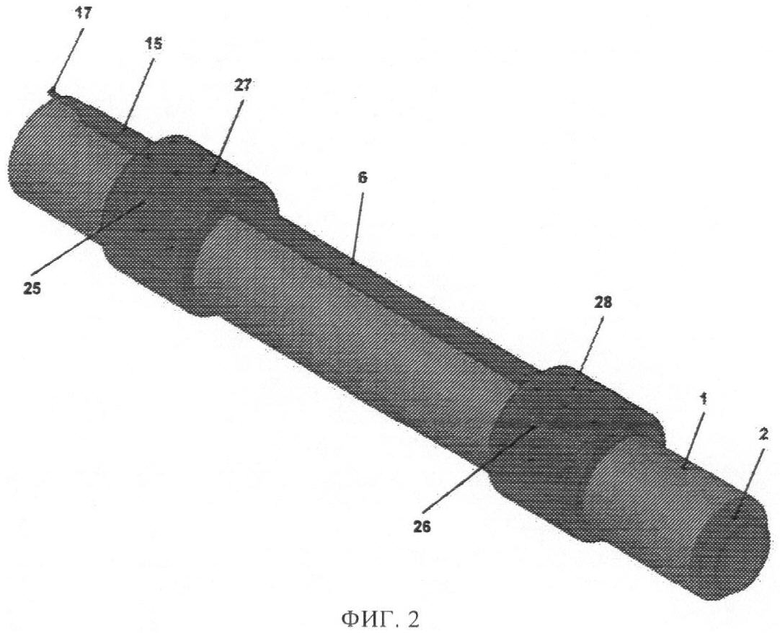
на фиг.2 - вид в изометрии части узла клапана со скользящей втулкой с устройством определения положения;
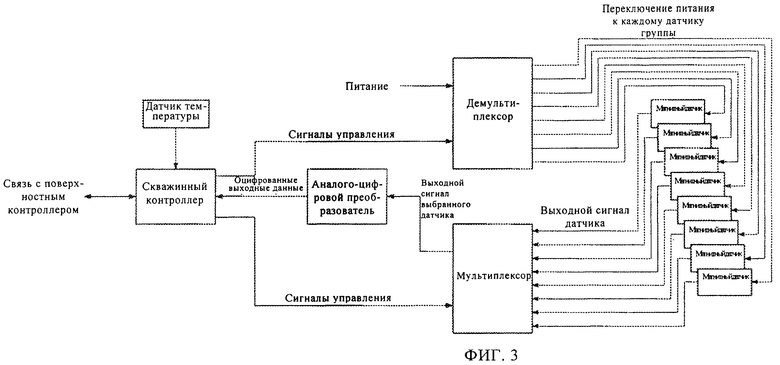
на фиг.3 - упрощенная электрическая блок-схема системы;
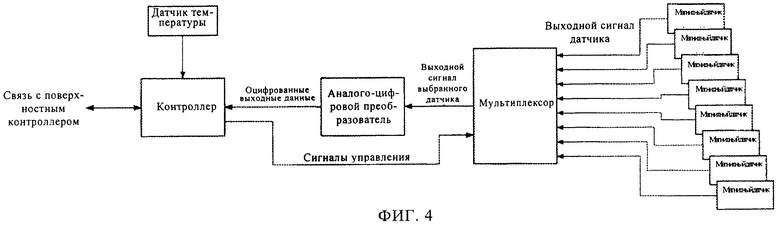
на фиг.4 - вид с фиг.3, на котором изображен альтернативный вариант выполнения без демультиплексора;
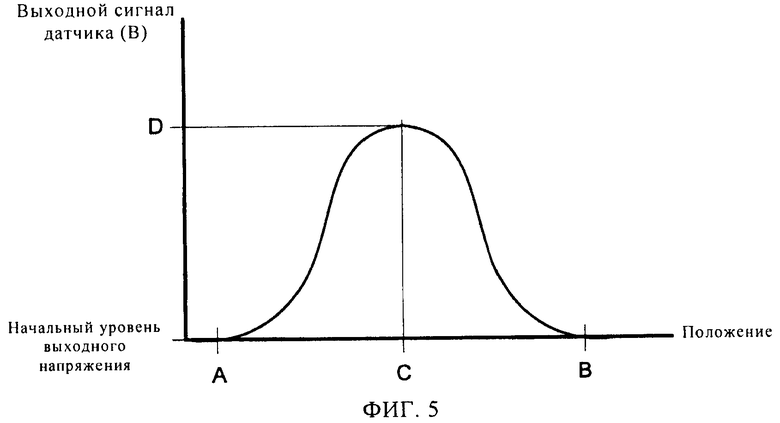
на фиг.5 - график выходного отклика типичного линейного датчика Холла при южном полюсе магнита, обращенном к датчику, который поступательно перемещается мимо него;
на фиг.6 - упрощенная схема, отображающая взаимосвязь между магнитом и одним датчиком Холла;
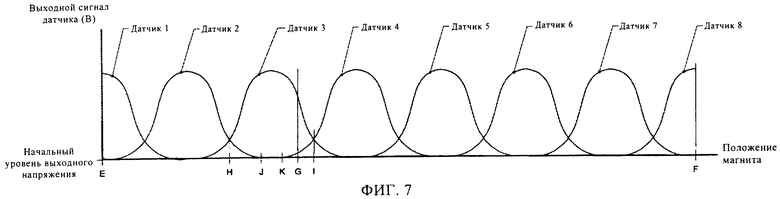
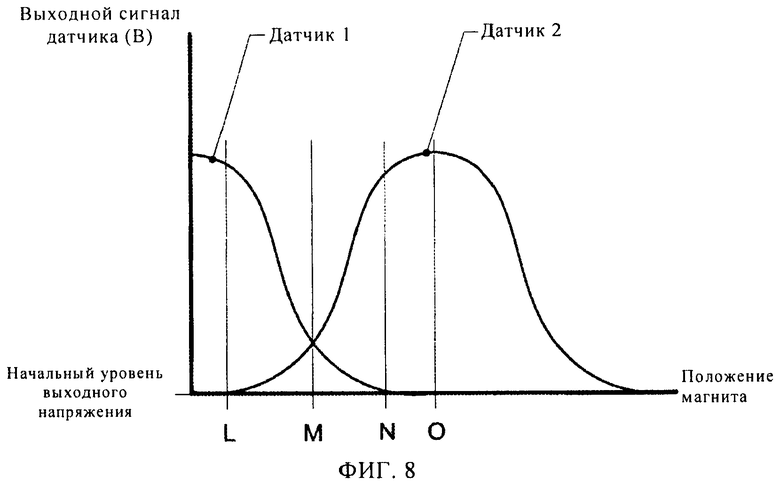
На фиг.7, 8 и 9 - графики выходного отклика решетки типичных линейных датчиков Холла при поступательном движении магнита с обращенным к датчику южным полюсом вдоль решетки датчиков;
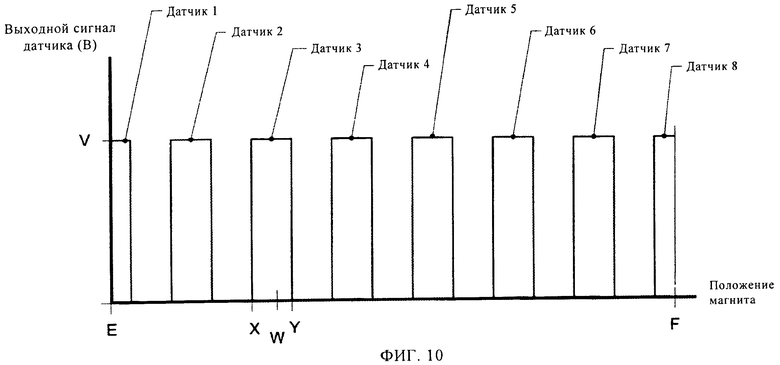
на фиг.10 - график зависимости выходного напряжения решетки из восьми датчиков от положения магнита для случая, когда датчики представляют собой переключатели на эффекте Холла;
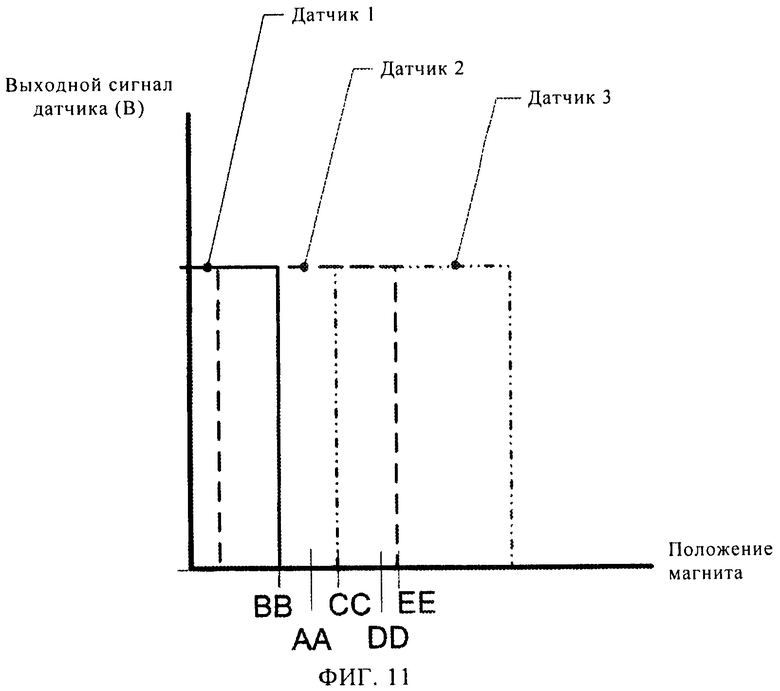
на фиг.11 - модификация варианта с фиг.10, отображающая случай, когда переключатели сдвинуты ближе друг к другу;
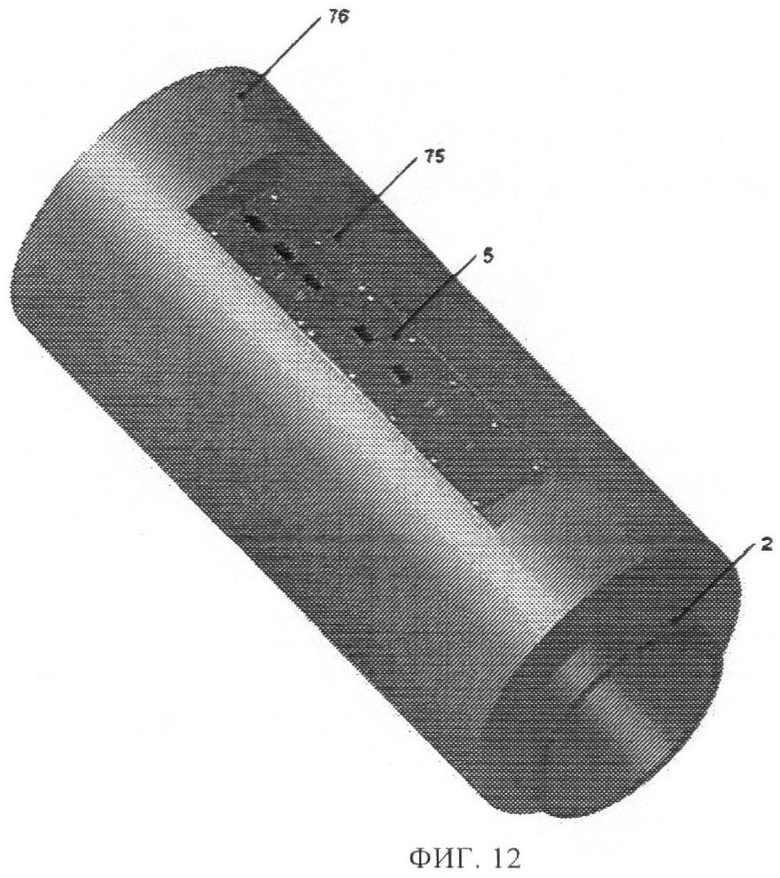
на фиг.12 - вид части устройства с удаленной крышкой;
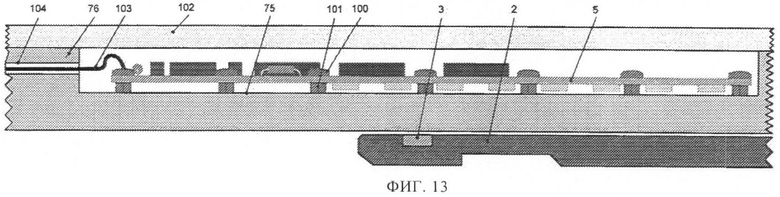
на фиг.13 - сечение устройства с фиг.12;
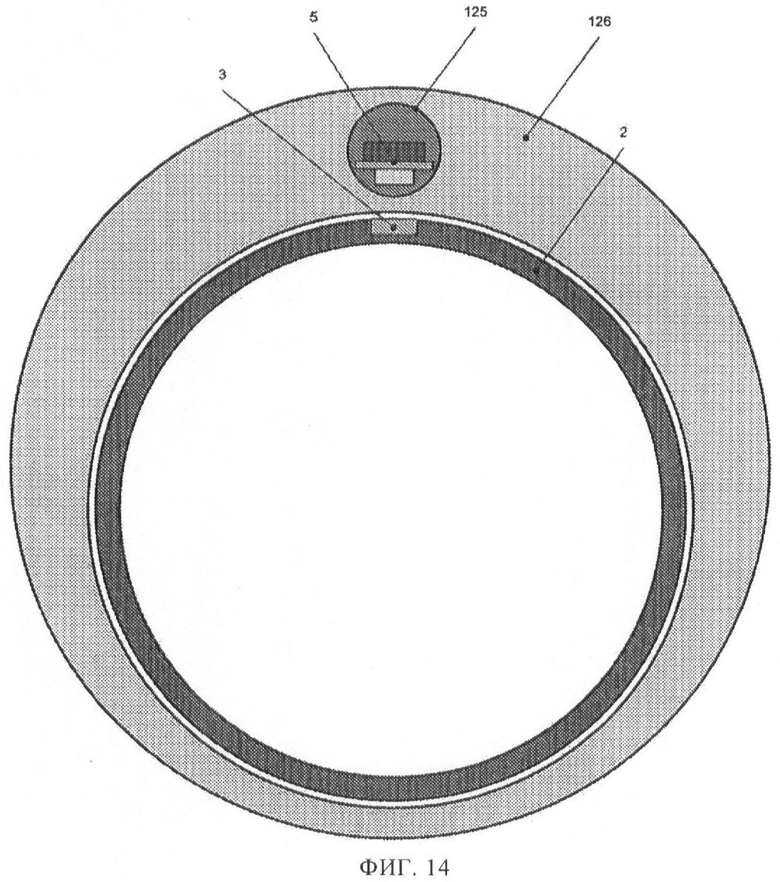
на фиг.14 - вариант, альтернативный фиг.12, на котором показаны датчики, помещенные в канал в стенке скважинного средства;
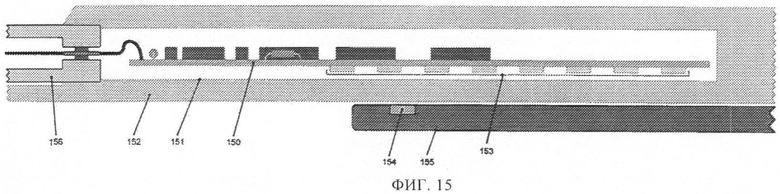
на фиг.15 - альтернативный вариант выполнения скважинного дроссельного клапана;
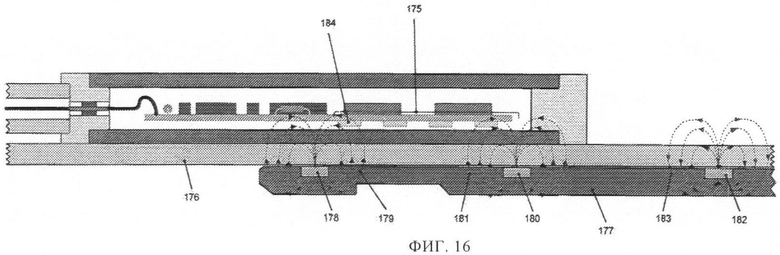
на фиг.16 - альтернативный вариант выполнения, в котором длина решетки меньше, чем диапазон перемещения магнита;
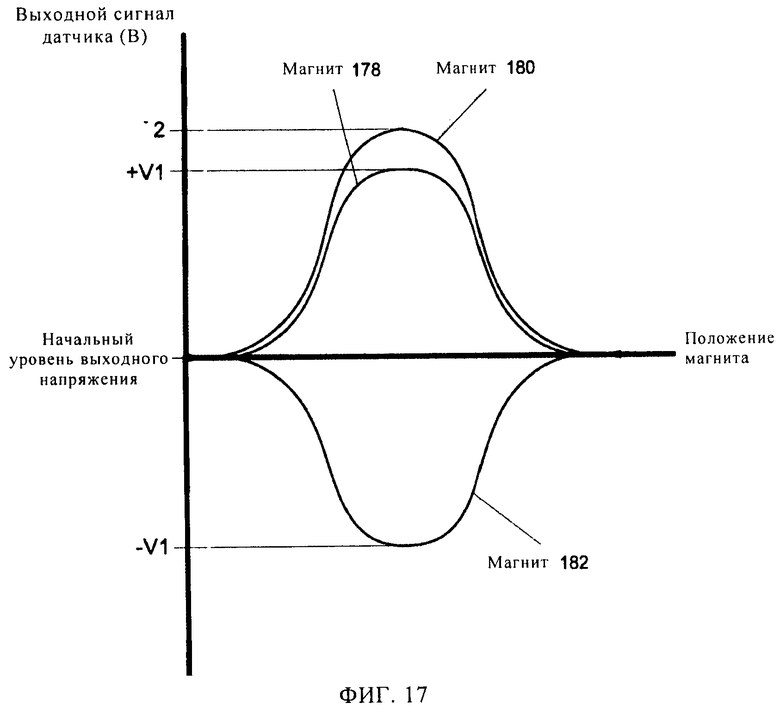
на фиг.17 - график выходного отклика типичного линейного датчика Холла при поступательном перемещении мимо него магнитов с разными значениями напряженности поля и полярностью.
Осуществление изобретения
В одном из вариантов выполнения подвижный элемент представляет собой часть дистанционно приводимого в действие устройства регулирования потока со скользящей втулки. Обращаясь к фиг.1 можно видеть, что корпус 1 скважинного инструмента - это цилиндрический элемент, связанный по верхнему краю с эксплуатационной насосно-компрессорной колонной (не показана) и, таким образом, закрепленный на месте внутри скважины. На нижнем краю имеется ряд щелей (не показаны), расположенных по окружности. Втулка 2 представляет собой цилиндрический элемент, заключенный в корпусе 1 скважинного инструмента. Нижний конец втулки 2 имеет ряд прорезей (не показаны), расположенных по окружности и ориентированных так, чтобы совпадать с прорезями в корпусе 1 скважинного инструмента. Ряд уплотнений (не показаны) герметизирует кольцевое пространство между корпусом 1 скважинного инструмента и втулкой 2 и расположен ниже и выше прорезей в корпусе 1. При приложении к устройству внешнего приводного усилия втулка 2 перемещается в осевом направлении внутри корпуса 1 скважинного инструмента. У одной из границ диапазона перемещения втулки 2 прорези в корпусе 1 скважинного инструмента и во втулке 2 совмещаются, давая возможность прохождения потока между пластом и скважиной. Если втулка 2 расположена у другой границы своего диапазона перемещения, щели во втулке 2 изолированы от щелей в корпусе 1 скважинного инструмента уплотнениями, находящимися в кольцевом промежутке, и прохождение потока из пласта или в обратном направлении невозможно. При перемещении втулки 2 в промежуточное положение щели в корпусе 1 скважинного инструмента и во втулке 2 перекрываются только частично. Эффективную площадь потока через устройство можно изменять путем изменения перекрытия щелей корпуса 1 скважинного инструмента и втулки 2, что, следовательно, дает возможность регулировки потока между пластом и скважиной.
Корпус 1 скважинного инструмента предпочтительно выполнен из материала с низкой магнитной проницаемостью, такого как никелевый сплав 718. Втулка 2 может быть выполнена из материла, обладающего или высокой, или низкой магнитной проницаемостью. Магнит 3 встроен во втулку 2 так, чтобы его южный полюс был ориентирован в направлении наружного диаметра устройства. Магнит 3 создает магнитное поле, изображенное линиями 4 магнитной индукции. Плата 5 датчиков помещена в кожух 6 электронного блока. На плате 5 датчиков находится решетка 7 датчиков, мультиплексор 8, демультиплексор 9, блок 10 контроллера и датчик 18 температуры. Решетка 7 датчиков содержит группу линейных датчиков Холла 11, расположенных на одинаковых расстояниях друг от друга в осевом направлении, совпадающем с направлением перемещения втулки 2. Низкая магнитная проницаемость материала, использованного в конструкции корпуса 1, делает возможность магнитному полю магнита 3 достичь отдельных датчиков Холла 11, входящих в решетку 7 датчиков.
На фиг.2 можно видеть, что кожух 6 электронного блока представляет собой герметизированный полый контейнер из материала с низкой магнитной проницаемостью, такого как никелевый сплав 718, смонтированный на корпусе 1 скважинного инструмента и снабженный верхним крепежным узлом 25 и нижним крепежным узлом 26. Втулка 2 заключена в корпусе 1 скважинного инструмента. Кожух 6 электронного блока совмещен в осевом и радиальном направлениях с магнитом (на этом виде не показан), встроенном во втулку 2. Узел 15 кабельной муфты образует средство соединения с кабель-тросом 17, идущим к поверхностному контроллеру (не показан).
Возвращаясь обратно к фиг.1, можно видеть, что кожух 6 электронного блока герметизирован верхней торцевой заглушкой 12 и нижней торцевой заглушкой 13. Такая герметизация предпочтительно обеспечивается приваркой верхней торцевой заглушки 12 и нижней торцевой заглушки 13 к кожуху 6 электронного блока, но может также обеспечиваться другими известными способами, такими как упругие уплотнения, неупругие уплотнения или уплотнения металл по металлу. Выход блока 10 контроллера разведен на кабель 16. Верхняя торцевая заглушка 12 связана с кабельной муфтой 15 и снабжена подводом через узел 14, обеспечивающим связь кабеля 16 и кабель-троса 17. Кабель-трос 17 проходит на поверхность и соединен с поверхностным контроллером (не показан).
Ориентирование и правильное позиционирование кожуха 6 электронного блока на корпусе 1 скважинного инструмента обеспечивает точность системы. На фиг.2 видно, что верхний и нижний крепежные узлы 25 и 26 снабжены съемными верхними чехлами 27 и 28. Съемные верхние чехлы 27 и 28 дают возможность отделять кожух 6 электронного блока от верхнего и нижнего крепежных узлов 25 и 26. Это делает возможным свободный доступ к кабельной муфте 15 для облегчения соединения с кабель-тросом 17. Верхний и нижний крепежные узлы 25 и 26 остаются жестко закрепленными и зафиксированными на месте на корпусе 1 скважинного инструмента, в то время как кожух 6 электронного блока может быть удален. Верхний и нижний крепежные узлы 25 и 26 снабжены ориентирующим приспособлением, обеспечивающим при повторной установке точное расположение кожуха 6 электронного блока в том же месте.
Возвращаясь снова к фиг.1, можно видеть, что плата 5 датчиков надежно связана с кожухом 6 электронного блока, что предотвращает перемещение решетки 7 датчиков относительно втулки 2 и гарантирует правильную ориентацию решетки датчиков относительно магнита 3. Плата 5 датчиков может быть закреплена в корпусе с использованием нескольких широко известных способов, и поэтому способ ее закрепления не рассматривается. Решетка 7 датчиков предпочтительно установлена как можно ближе к низу кожуха 6 электронного блока, так чтобы датчики Холла 11 находились в непосредственной близости к магниту 3. Решетка 7 датчиков перекрывает диапазон перемещения магнита 3, в котором требуется измерять положение втулки.
В другом эквивалентном варианте выполнения системы решетка 7 датчиков может быть закреплена на подвижном элементе, и магнит 3 может быть расположен в корпусе 1 скважинного инструмента.
Хотя показана решетка из восьми датчиков, можно легко понять, что решетка может состоять из любого числа датчиков 11, которое требуется для полного покрытия диапазона перемещения втулки 12. Аналогично, хотя показано, что электронные компоненты расположены на одной плате, они могут быть распределены на двух или более платах, как это требуется для облегчения компоновки устройства.
Блок 10 контроллера представляет собой систему на основе микропроцессора или микроконтроллера. Он состоит из одного или более микропроцессоров или микроконтроллеров и связанных с ними компонентов, требуемых для выполнения задачи опроса решетки датчиков, обработки данных с датчиков, связи с поверхностным контроллером и любых других функций управления, требуемых от скважинного средства. Связь со скважинным контроллером 10 может быть или непосредственной связью между отдельным скважинным средством и поверхностным контроллером, или составлять часть большей системы сбора данных и регулирования, включающей другие скважинные устройства, такие как датчики и устройства дистанционного регулирования потока.
На фиг.3 показано, что решетка датчиков связана с аналого-цифровым преобразователем через мультиплексор. Выход аналого-цифрового преобразователя соединен со скважинным микроконтроллером. Аналого-цифровой преобразователь может быть отдельным компонентом или интегрированным элементом самого микроконтроллера. Питание на решетку датчиков подается через демультиплексор. Это дает возможность по отдельности включать датчики 11 по запросу, чтобы минимизировать расход питания, требуемого для решетки датчиков. Сигналы управления со скважинного контроллера формируют адресный вход как мультиплексора, так и демультиплексора. Для определения местоположения магнита контроллер направляет адресный сигнал первого датчика в демультиплексор. Затем демультиплексор подключает выход к первому датчику, подавая тем самым на него питание. Затем скважинный контроллер подает адресный сигнал первого датчика на мультиплексор и подключает его выход, направляя тем самым выходной сигнал первого датчика на аналого-цифровой преобразователь. Аналого-цифровой преобразователь затем оцифровывает выходной сигнал датчика и посылает его на скважинный контроллер. После чего скважинный контроллер переводит в неактивное состояние мультиплексор и демультиплексор, отключая тем самым первый датчик. Скважинный контроллер повторяет эту операцию для всех датчиков решетки. После считывания со всех датчиков скважинный контроллер передает значения исходных данных поверхностному контроллеру для обработки или альтернативно вычисляет фактическое положение по собранным значениям до передачи фактического положения на поверхность.
Как величина магнитного поля, создаваемого магнитом, так и чувствительность датчиков могут быть подвержены влиянию воздействия температуры. В систему может быть введен датчик температуры, как показано на фиг.3, обеспечивающий температурную коррекцию показаний датчиков. Таким датчиком может быть терморезистор, дистанционный температурный датчик или другое чувствительное к температуре средство.
Хотя в одном из вариантов выполнения введен демультиплексор, служащий для переключения питания, подаваемого на датчики, он может быть исключен, и датчики могут получать питание постоянно. На фиг.4 представлена упрощенная электрическая блок-схема для этого варианта выполнения.
Линейные датчики Холла представляют собой устройства, чувствительные к магнитному полю. Большинство линейных датчиков Холла имеют линейное изменение выходного сигнала в зависимости от напряжения питания, то есть их выходное напряжение и чувствительность пропорциональны подаваемому напряжению. Выходное напряжение при отсутствии магнитного поля обычно составляет 1/2 от напряжения питания. Датчик Холла также чувствителен к полярности магнитного поля. При наличии поля южного магнитного полюса выходное напряжение будет увеличиваться. При наличии поля северного магнитного полюса выходное напряжение будет уменьшаться. Изменение выходного сигнала пропорционально изменению магнитной индукции приложенного магнитного поля.
На фиг.5 по вертикальной оси отложен выходной сигнал датчика, и по горизонтальной оси - положение магнита. График построен таким образом, что горизонтальная ось в начальной точке совпадает с напряжением выходного сигнала при отсутствии магнитного поля (начальным уровнем). Точки А и В соответствуют границам, в которых датчик реагирует на магнит. Точка D соответствует амплитуде выходного сигнала датчика, приходящейся на положение магнита в точке С в центре под датчиком. В точках А и В выходной сигнал датчика в основном равен начальному выходному напряжению (при отсутствии магнитного поля). Положение точек А и В, а также амплитуда D являются функцией размера, формы и напряженности поля магнита, чувствительности датчика и расстояния между датчиком и поверхностью магнита.
На фиг.6 датчик 50 установлен в фиксированном положении с чувствительной поверхностью 51, ориентированной нормально к его оси и обращенной к магниту. Магнит 52 закреплен на подвижном элементе, так что поверхность 53 его южного полюса ориентирована нормально к его оси и обращена к датчику. При движении магнита по его траектории 55 расстояние 56 между плоскостью поверхности 53 южного полюса и плоскостью поверхности 51 датчика сохраняется постоянным. При нахождении магнита 52 на расстоянии 57 от оси датчика датчик 50 начинает реагировать на магнит. Расстояние 57 соответствует точке А на фиг.5. При движении магнита 52 к оси датчика 50 выходной сигнал последнего продолжает расти. Выходной сигнал датчика 50 достигает своего максимума, когда положение магнита 52 совпадает с осью датчика 50. Это соответствует точке С на фиг.5. По мере продвижения магнита 50 выходной сигнал датчика 50 падает до тех пор, пока не достигнет начального напряжения на расстоянии 58. Это соответствует точке В на фиг.5. Хотя в данном варианте выполнения использован магнит, южный полюс которого обращен к датчику, можно легко видеть, что систему можно также выполнить с обращенным к датчику северным полюсом. В этом случае волна, изображенная на фиг.5, будет перевернута так, что выходной сигнал датчика будет падать ниже начального уровня напряжения при отклике на магнитное поле.
Обращаясь снова к фиг.1, можно видеть, что линейный датчик Холла 11 выдает на выходе аналоговый сигнал, величина которого пропорциональна приложенному магнитному полю. По мере перемещения втулки 2 в своем диапазоне перемещения магнитное поле, воспринимаемое каждым датчиком, входящим в решетку 7 датчиков, изменяется. При приближении магнита 3 к местоположению каждого датчика магнитное поле 4 у этого датчика возрастает и соответственно возрастает выходное напряжение датчика. В точке, где магнит располагается непосредственно по центру под конкретным датчиком, магнитное поле 4, воспринимаемое датчиком, достигает своего максимума и соответственно своего максимума достигает выходное напряжение датчика. Когда магнит 3 проходит датчик и начинает удаляться, магнитное поле вблизи датчика начинает падать и выходное напряжение датчика также начинает падать.
На фигурах 7, 8 и 9 представлены графики выходного отклика группы типичных линейных датчиков Холла при поступательном движении магнита вдоль решетки датчиков. По вертикальной шкале отложен выходной сигнал датчика, по горизонтальной шкале - положение магнита. Графики построены таким образом, что горизонтальная ось в начальной точке совпадает с напряжением выходного сигнала при отсутствии магнитного поля (начальным уровнем). На фиг.7 представлен график зависимости выходного напряжения восьми датчиков решетки от положения магнита. В данном примере точка Е соответствует одному краю диапазона перемещения магнита, и точка F - другому краю. Датчик 1 центрирован относительно точки Е, и датчик 8 центрирован относительно точки F. При движении магнита от Е к F он проходит мимо каждого датчика решетки. Первоначально при нахождении магнита в точке Е выходной сигнал датчика 1 имеет максимальную величину. При движении магнита к точке F выходной сигнал датчика 1 начинает падать.
На фиг.8 этот график приведен только для первых двух датчиков решетки. При продолжении движения магнита выходной сигнал датчика 1 продолжает падать. Когда магнит достигает местоположения L, датчик 2 также начинает реагировать на магнитное поле, однако величина выходного сигнала датчика 1 все еще превосходит. Местоположение М соответствует точке, эквидистантой между двумя датчиками. После прохождения магнита местоположения М величина выходного сигнала датчика 2 становится больше величины выходного сигнала датчика 1. По мере продолжения движения магнита выходной сигнал датчика 2 продолжает возрастать, а выходной сигнал датчика 1 падать вплоть до достижения местоположения N, после которого датчик 1 перестает реагировать на магнитное поле. При дальнейшем движении магнита выходной сигнал датчика 2 продолжает возрастать до того момента, когда магнит встанет по центру под датчиком 2 в местоположении О. После прохождения магнитом этой точки выходной сигнал датчика 2 начинает падать. Такая картина повторяется при прохождении магнита мимо каждого датчика решетки.
Такая повторяемость откликов датчиков на магнитное поле может быть использована для вычисления положения магнита по любому из нескольких способов.
В простейшем способе для определения местоположения магнита используется местоположение датчика с максимальным выходным сигналом. Возвращаясь к фиг.7, можно видеть, что когда магнит находится в местоположении G, как датчик 3, так и датчика 4 дают отклик на наличие магнитного поля. Величина выходного сигнала датчика 3 больше, чем датчика 4, и поэтому легко определить, что магнит находится ближе к датчику 3, чем к датчику 4. Используя простой способ определения того, что датчик 3 выдает максимальный выходной сигнал из восьми датчиков решетки, можно принять решение, что магнит находится между местоположениями Н и I. Можно видеть, что разрешение, достигаемое в этом способе, равно расстоянию между датчиками.
Разрешение может быть дополнительно улучшено путем использования для определения положения величин, полученных с нескольких датчиков. В простейшей реализации способа величины с двух дающих наибольшее значение сигнала датчиков сравнивают для улучшения разрешения до менее, чем одного расстояния между датчиками. Возвращаясь к фиг.7, можно видеть, что при расположении магнита с центром в местоположении G датчик 3 выдает наибольший выходной сигнал из всех датчиков решетки. Если датчик 3 является единственным датчиком, демонстрирующим отклик на магнит, то местоположение магнита может быть определено, как находящееся между J и K. Если выходной сигнал датчика 2 также обозначает наличие отклика, местоположение магнита может быть определено, как находящееся между J и Н. В данном примере магнит в действительности находится в точке G, и датчик 4 также должен реагировать на магнитное поле, а датчик 2 не реагировать. Поэтому может быть сделано заключение, что местоположение магнита находится между K и I.
Точность и разрешение могут быть доведены до максимума изменением промежутка между датчиками и их чувствительности, размера, формы и напряженности поля магнита, а также расстояния между датчиком и поверхностью магнита для обеспечения того, чтобы постоянно два или более датчика реагировали на магнитное поле. Фиг.9 иллюстрирует такой случай. В данном примере приведенные параметры выбраны так, чтобы постоянно по меньшей мере три датчика реагировали на магнитное поле. При нахождении магнита в местоположении R датчик 3 даст величину выходного сигнала S, датчик 4 даст величину выходного сигнала Т и датчик 2 даст величину выходного сигнала U. За счет точной калибровки при изготовлении выходных сигналов отклика датчиков положение магнита может быть точно вычислено математически по величинам выходных сигналов с трех датчиков с использованием нескольких методов, известных специалистам в этой области. Аналогичные алгоритмы могут быть использованы для любого числа перекрывающихся откликов датчиков.
Хотя в одном из предпочтительных вариантов выполнения в решетке датчиков использованы линейные датчики Холла, в другом варианте используются переключатели на основе эффекта Холла. Такие датчики представляют собой устройства, которые для индикации наличия магнитного поля выдают выходной сигнал, соответствующий уровню логического нуля или уровню логической единицы. При наличии достаточно сильного магнитного поля датчик изменяет состояние. Если напряженность поля падает ниже заданного уровня, выход переключается из предыдущего состояния. В этом варианте выполнения аналого-цифровой преобразователь в контроллере не нужен.
На фиг.10 представлен график изменения выходного напряжения восьми датчиков решетки от положения магнита. Датчики, входящие в решетку, представляют собой переключатели на основе эффекта Холла. По вертикали отложено напряжение выходного сигнала датчиков. По горизонтали отложено положение магнита в диапазоне его перемещения. Точка Е соответствует одному краю диапазона перемещения магнита, и точка F - другому краю. При прохождении магнитом каждого датчика решетки выход последнего включается, выдавая выходное напряжение V, и затем выключается, когда магнит удаляется достаточно далеко за переключатель. С использованием этих повторяющихся откликов датчиков на магнит положение магнита может быть вычислено, если он находится достаточно близко к одному из датчиков. Если магнит находится в местоположении W, выход датчика 3 включен, и, следовательно, положение может быть определено, как находящееся между точками Х и Y. Ограничение этого способа состоит в том, что, если магнит не находится достаточно близко к датчику, чтобы вызвать его отклик, данное местоположение не может быть вычислено.
Это ограничение можно преодолеть, если расположить переключатели на основе эффекта Холла достаточно близко друг к другу, так чтобы местоположения, на которые реагирует каждый датчик, перекрывались. На фиг.11 подробно изображены выходные отклики первых трех датчиков решетки. В данном примере диапазоны откликов датчиков перекрываются. Это дает как улучшение разрешения, так и исключение наличия местоположений, для которых их координата не может быть определена. Если магнит находится в положении АА, только датчик 2 включен и датчики 1 и 3 выключены, поэтому местоположение может быть определено, как находящееся между точками ВВ и СС. Если магнит находится в положении DD, выходы обоих датчиков 2 и 3 включены и датчик 1 выключен, поэтому местоположение может быть определено, как находящееся между точками СС и ЕЕ. Аналогичное размещение может быть использовано для любого числа перекрывающихся откликов датчиков.
В другом варианте выполнения решетка датчиков закреплена в уплотненном углублении в корпусе скважинного средства. На фиг.12 изображена часть устройства с удаленной крышкой. Плата 5 датчиков закреплена в углублении 75 корпуса 76 скважинного средства. Втулка 2 движется в осевом направлении в корпусе 76 скважинного средства. Обращаясь к представленному на фиг.13 сечению, можно видеть, что плата 5 датчиков закреплена на дне углубления 75, выполненного в корпусе 76 скважинного средства, винтами 100 и стойками 101 или аналогичным широко известным способом. Крышка 102 уплотняет углубление 75. Уплотнение может быть создано любым из многих известных способов, включая сварку, упругие уплотнения, неупругие уплотнения или уплотнения металл по металлу. Магнит 3 расположен во втулке 2 и поступательно перемещается вдоль оси под решеткой датчиков. Кабель 103 выходит из углубления через канал 104, просверленный в корпусе 76 скважинного средства.
В другом варианте выполнения решетка датчиков закреплена в уплотненном канале в корпусе скважинного средства. Как видно на фиг.14, канал 125 находится в корпусе 126 скважинного средства. Плата 5 датчиков размещена в канале 125. Магнит 3 смонтирован во втулке 2 и поступательно перемещается вдоль оси под решеткой датчиков. Канал уплотнен кабельной муфтой (не показана). Кабельная муфта может быть приварена к корпусу 126 скважинного средства или прикреплена к нему на резьбе, и уплотнение может быть выполнено упругими уплотнениями, неупругими уплотнениями или уплотнениями металл по металлу.
Решетка магнитных датчиков может быть использована для индикации состояния скважинного дроссельного клапана. В этом варианте выполнения перемещение проточной трубы измеряется для определения того, закрыт ли клапан-отсекатель (предохранительный клапан), находится в равновесном положении или в открытом положении, или в промежуточном положении. На фиг.15 представлена часть типичного дроссельного клапана. Датчик и электронная плата 150 смонтированы в канале 151 в корпусе 152 скважинного средства. Решетка 153 датчиков обращена к внутреннем диаметру устройства. Магнит 154 смонтирован в проточной трубе 155. Кабельная муфта герметизирует торец канала и обеспечивает связь с поверхностью. Магнит 154 поступательно перемещается в осевом направлении под решеткой 153 датчиков, и проточная труба сдвигается из закрытого положения, через равновесное, в открытое положение. Положение проточной трубы может быть определено по откликам датчиков, как описано ранее. В другом варианте выполнения решетка датчиков может быть установлена в канале меньшего диаметра, а контроллер может быть закреплен на некотором удалении в другой части клапана-отсекателя или на переходнике выше него.
Решетка датчиков может быть также использована для определения удлинения компенсатора линейного расширения. Компенсатор линейного расширения состоит из внутреннего элемента, движущегося по оси внутри наружного элемента, создавая возможность изменения размера по длине промысловой насосно-компрессорной колонны. В этом варианте выполнения магнит устанавливают во внутреннем элементе, и решетку датчиков - на наружном элементе. При линейном перемещении внутреннего элемента и магнита в их диапазоне перемещения отслеживается отклик датчиков, и положение магнита, а следовательно, и степень расширения определяют как было рассмотрено выше.
В предыдущих вариантах выполнения решетка датчиков предпочтительно перекрывает все расстояние, на котором желательно определять положение. В некоторых применениях можно достичь преимущества, имея более короткую решетку датчиков. На фиг.16 представлен вариант выполнения, в котором в устройстве регулирования потока, снабженном дистанционно приводимой в действие скользящей втулкой, используется более короткая решетка. Решетка 175 датчиков закреплена на корпусе 176 скважинного средства над путем прохождения втулки 177. Первый магнит 178 и второй магнит 180 смонтированы во втулке. Дополнительные магниты при необходимости монтируются так, чтобы перекрывать диапазон перемещения втулки, в котором требуется определять ее положение. Эти магниты установлены так, чтобы все время магнитные поля 179, 181, 183 по меньшей мере одного магнита вызывали отклик решетки датчиков. При известной начальной позиции положение магнита, перемещающегося под решеткой датчиков, может быть определено описанным выше способом. Учитывая, как много магнитов проходит мимо решетки датчиков, положение втулки может быть точно определено.
Другой способ позволяет вычислять положение без знания начального положения. Это может быть выполнено путем изменения полярности магнитов или изменением их размера, формы или материала, приводящим к изменению напряженности их магнитного поля. На фиг.16 магниты 178 и 180 ориентированы так, что их южные полюса обращены к решетке датчиков. Магнит 182 ориентирован своим северным полюсом к решетке 175 датчиков. Магнит 180 выполнен так, что напряженность его магнитного поля выше, чем напряженность поля магнита 178. Напряженность магнитного поля магнита 182 такая же, как магнита 178. На фиг.17 дан график отклика датчика на три магнита. Максимальный выходной сигнал датчика для магнита 178 равен +V1. Максимальный отклик датчика для магнита 180 равен +V2. Максимальный выходной сигнал датчика от магнита 182 равен +V1. Отсюда можно видеть, что магнит может быть идентифицирован по кривой отклика на него. С использованием этого приема и описанных ранее способов положение втулки может быть точно определено. Хотя в данном варианте использованы только три магнита, этот технический прием при необходимости может быть распространен на любое число магнитов.
Альтернативный вариант выполнения главным образом относится к способу определения положения сервисных скважинных средств, опускаемых на кабель-тросе или гибкой трубе в нефтяные и газовые промысловые скважины. В частности, он относится к системе магнитного измерения положения, предназначенной для определения положения средств, опускаемых в скважину для выполнения операций по монтажу и используемых при заканчивании скважины компонентов.
Во многих случаях желательно знать положение устройства, опущенного в скважину на кабель-тросе или гибкой трубе. Соответствующие устройства могут опускаться по многим причинам. Одним из наиболее распространенных примеров является переводное устройство для смещения скользящих муфт. В некоторых случаях устанавливают несколько скользящих муфт одинакового размера. Тогда должно быть известно положение устройства относительно скользящих муфт, чтобы гарантировать надлежащее перемещение последних. В настоящем изобретении предложено устройство, надежно определяющее конкретное положение в скважине и отслеживающее перемещение при работе переводного устройства из этого положения.
В скважине, в колонне насосно-компрессорных труб устанавливают последовательность цилиндрических магнитов в точках, где желательно точно определять положение. Решетку из нескольких датчиков Холла опускают в скважину на кабель-тросе или гибкой трубе с проходящим внутри кабель-тросом и обнаруживают магниты. Преимущество нескольких датчиков над одним датчиком заключается в том, что достигается более точное определение положения и появляется возможность отслеживать перемещение устройства относительно магнита в процессе выполнения скважинных операций.
Предшествующее описание является иллюстрацией к предпочтительному варианту выполнения изобретения, и специалистами в данной области могут быть сделаны многочисленные модификации без выхода за объем изобретения, который должен определяться в строгом и эквивалентном соответствии с приведенной ниже формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТРУБЫ В КОНСТРУКЦИИ НЕФТЯНОЙ СКВАЖИНЫ И СПОСОБ УКАЗАННОГО ИЗМЕРЕНИЯ | 2016 |
|
RU2703047C1 |
| Скважинное устройство и способ его использования для проведения операций гидроразрыва пласта | 2024 |
|
RU2841074C1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
| ПРОГРАММИРУЕМЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360° | 2006 |
|
RU2317522C2 |
| ДАТЧИК МАГНИТНОГО СОПРОТИВЛЕНИЯ ДЛЯ ОБНАРУЖЕНИЯ НАМАГНИЧИВАЕМОЙ КОНСТРУКЦИИ В ПОДЗЕМНОЙ СРЕДЕ | 2014 |
|
RU2671016C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СОЕДИНИТЕЛЬНОЙ МУФТЫ ВНУТРИ КОНСТРУКЦИИ НЕФТЯНОЙ СКВАЖИНЫ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2013 |
|
RU2635146C2 |
| ПРОФИЛЕМЕР-КАВЕРНОМЕР | 2013 |
|
RU2533480C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ПЕДАЛИ | 2005 |
|
RU2301399C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360 ГРАДУСОВ | 2005 |
|
RU2313763C2 |
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
Изобретение относится к способам регулирования нефтяных и газовых промысловых скважин. Способ определения в скважине положения подвижного компонента относительно неподвижного компонента включает установку, по меньшей мере, одного источника сигнала и группы датчиков, регистрирующих, по меньшей мере, один сигнал от указанного источника, соответственно на подвижный компонент и неподвижный компонент. При этом определяют, какой из, по меньшей мере, двух соседних датчиков обнаруживает сигнал от указанного источника, и вычисляют положение подвижного компонента с использованием только выходного сигнала от датчиков, регистрирующих сигнал. Техническим результатом является повышение эффективности определения положения подвижного элемента. 19 з.п. ф-лы, 17 ил.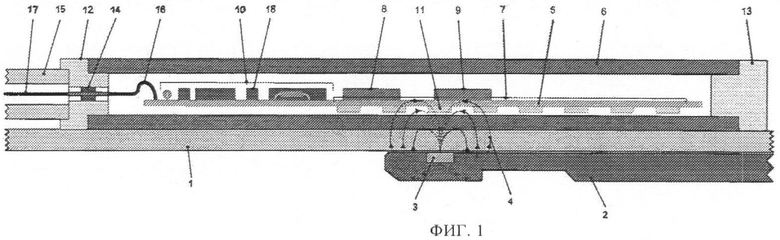
1. Способ определения в скважине положения подвижного компонента относительно неподвижного компонента, при выполнении которого: устанавливают, по меньшей мере, один источник сигнала и группу датчиков, регистрирующих, по меньшей мере, один сигнал от указанного источника, соответственно на подвижный компонент и неподвижный компонент, определяют, какой из, по меньшей мере, двух соседних датчиков обнаруживает сигнал от указанного источника, и вычисляют положение подвижного компонента с использованием только выходного сигнала от датчиков, регистрирующих сигнал.
2. Способ по п.1, в котором в качестве сигнала используют магнитное поле.
3. Способ по п.1, в котором осуществляют непосредственное измерение линейного смещения подвижного компонента относительно неподвижного компонента.
4. Способ по п.2, в котором для всех упомянутых датчиков используют датчик Холла или переключатель на эффекте Холла.
5. Способ по п.4, в котором обеспечивают отклик датчика или переключателя на упомянутый источник на одинаковом или отличающемся заданном расстоянии.
6. Способ по п.4, в котором осуществляют перекрытие, по меньшей мере, части полного диапазона перемещения подвижного компонента датчиками или переключателями.
7. Способ по п.4, в котором осуществляют установку датчиков в корпусе скважинного инструмента и, по меньшей мере, одного магнита в подвижном скважинном компоненте, перемещение которого линейно относительно упомянутого корпуса.
8. Способ по п.7, в котором используют в качестве упомянутого подвижного компонента скользящую втулку, проточную трубу предохранительного клапана, часть компенсатора расширения или дроссельную втулку.
9. Способ по п.4, в котором осуществляют определение текущего положения подвижного компонента без необходимости в знании его предыдущего положения.
10. Способ по п.9, в котором используют в качестве источников сигнала магниты и изменяют полярность этих магнитов или их размер, форму или материал для изменения напряженности их магнитного поля.
11. Способ по п.4, в котором осуществляют изменение расстояния между датчиками или магнитных свойств, так чтобы, по меньшей мере, три датчика обнаруживали сигнал во всем диапазоне перемещения подвижного компонента.
12. Способ по п.4, в котором используют кабель-трос или гибкую трубу для подвижного компонента и трубную колонну в качестве неподвижного компонента.
13. Способ по п.12, в котором закрепляют, по меньшей мере, один датчик на кабель-тросе или гибкой трубе и группы магнитов - в дискретных точках подвижных компонентов упомянутой трубной колонны, и определяют, какой подвижный компонент находится вблизи для приведения в действие упомянутым кабель-тросом или гибкой трубой.
14. Способ по п.4, в котором осуществляют последовательную подачу питания и последовательный опрос каждого датчика на наличие принятого сигнала, регистрацию принятого сигнала и затем отключение питания от данного датчика, сбор сигналов с, по меньшей мере, трех датчиков для вычисления положения подвижного компонента, вычисление положения подвижного компонента по упомянутым сигналам или в скважине, или на поверхности.
15. Способ по п.14, в котором обеспечивают температурную компенсацию при обнаружении сигнала и осуществляют непосредственное измерение линейного смещения подвижного компонента относительно неподвижного компонента.
16. Способ по п.4, в котором осуществляют непосредственное измерение линейного смещения подвижного компонента относительно упомянутого неподвижного компонента.
17. Способ по п.16, в котором обеспечивают отклик датчика или переключателя на источник на одинаковом или отличающемся заданном расстоянии.
18. Способ по п.17, в котором осуществляют перекрытие, по меньшей мере, части полного диапазона перемещения подвижного компонента датчиками или переключателями.
19. Способ по п.18, в котором осуществляют установку датчиков в корпусе скважинного инструмента и, по меньшей мере, одного магнита в подвижном скважинном компоненте, перемещение которого линейно относительно упомянутого корпуса.
20. Способ по п.19, в котором используют магниты в качестве источников сигнала и изменяют полярность магнитов или их размер, форму или материал для изменения напряженности их магнитного поля.
| US 2004255479 A1, 23.12.2004 | |||
| ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РАСПРЕДЕЛЕНИЯ РАБОЧЕЙ ЖИДКОСТИ (ВАРИАНТЫ), ПРИМЕНЯЕМЫЕ ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ СКВАЖИННЫХ ИНСТРУМЕНТОВ | 2001 |
|
RU2243361C2 |
| КЛАПАН-ОТСЕКАТЕЛЬ | 2005 |
|
RU2285180C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2001 |
|
RU2184844C1 |
| RU 2005115919 A, 20.11.2006 | |||
| US 2005264293 A1, 01.12.2005 | |||
| US 5666050 A, 09.09.1997. | |||

