Электромеханический привод трехцветной индикаторной головки элемента растрового изображения.
Изобретение относится к электроприводам и средствам индикации.
Известно устройство индикации в виде электродвигателя-бленкера для использования в цифровых часах бленкерного типа (патент РФ №2020607, 1994 г.), содержащее магнитопровод с обмоткой управления и ротор в виде диаметрально намагниченного постоянного магнита, размещенного на одном валу с индикатором, корпус выполнен в виде двух пластин, в которых установлены опоры вала, закрепленных колонками, одна из которых выполнена магнитопроводящей и служит средством фиксации ротора при обесточенной обмотке, вал и витки обмотки управления размещены параллельно валу ротора, выполненного заодно с индикатором в виде магнита в виде тела вращения с цилиндрической боковой поверхностью. Устройство имеет два устойчивых состояния индикаторной головки цилиндрической формы с нанесенными пятнами цветовой индикации, отличается довольно высокой сложностью и стоимостью производства.
Технический результат, на достижение которого направлено изобретение, заключается в создании электромеханического привода трехцветной индикаторной головки растрового изображения с тремя устойчивыми состояниями, соответствующими трем заданным цветам формирования цветовой системы многоцветных растровых изображений.
Другой технический результат заключается в создании механизма фиксации подвижной части привода в статичных положениях, усилие фиксации в котором создается за счет силы тяжести самой подвижной части, что обеспечивает абсолютную стабильность заданного усилия по величине, его неизменность на протяжении всего срока эксплуатации и в целом упрощает конструкцию и производство привода.
Другой технический результат заключается в использовании для управления положением индикаторной головки импульсного сигнала неизменной полярности, что обеспечивается конфигурацией электромагнитной системы привода, при этом существенно упрощаются цепи управления.
Другой технический результат заключается в исполнении деталей подвижной и неподвижной частей привода, позволяющим конструктивно и технологически интегрировать входящие в них узлы для уменьшения общего количества деталей привода, и возможности изготовления их методом литья из пластмасс под давлением, значительно повышающим точность изготовления и снижающем стоимость промышленного производства.
Технический результат заключается также в возможности осуществления анализа положения подвижной части по асимметрии его свойств для устойчивой работы привода.
Для достижения указанных результатов предложен электромеханический привод трехцветной индикаторной головки элемента растрового изображения, содержащий основание, статор, ротор и механизм фиксации ротора. Основание имеет корпус, содержащий гнезда для установки деталей статора, гнезда и штифты монтажного соединения, гильзу с отверстием для размещения полуоси вала ротора и пружины фиксации и выполняющей функцию посадочного вала ротора, а на ее торцевой грани под углом 120° размещены элементы пары зубчато-шлицевого механизма фиксации ротора, элементы крепления на сборочный узел, выводы для подключения, и обеспечивает размещение и точное позиционирование ротора относительно статора и самого устройства на сборочном узле. Статор содержит обмотку и магнитопровод с магнитным зазором, создающий необходимую форму, ориентацию и размеры магнитного поля. Ротор имеет корпус в форме трехгранной прямой призмы, у которой боковые грани имеют плоскую или выпуклую поверхность и окрашены в заданные цвета путем нанесения красок нужного цвета или оттенка, в том числе флуоресцентных, светоотражающих и светопоглощающих, корпус ротора имеет полуось вала поворота на одной грани основания и отверстие для установки на гильзу основания, проходящую по оси масс призмы параллельно боковым граням, вдоль боковых ребер размещаются вставки из магнитопроводящего материала, одна из которых имеет отличающиеся от других магнитные свойства, в выполненных в корпусе гнездах. Статор и ротор расположены аксиально относительно друг друга. Механизм фиксации имеет три зубчато-шлицевых узла, элементы которых выполнены заодно с корпусами основания и ротора. Корпуса основания и ротора выполнены из пластмассы методом литья под давлением.
Конструкция электромеханического привода индикаторной головки поясняется сборочными чертежами на фиг.1а-1е.
На фиг.1а показан общий вид устройства, состоящего из основания, ротора, статора, механизма фиксации.
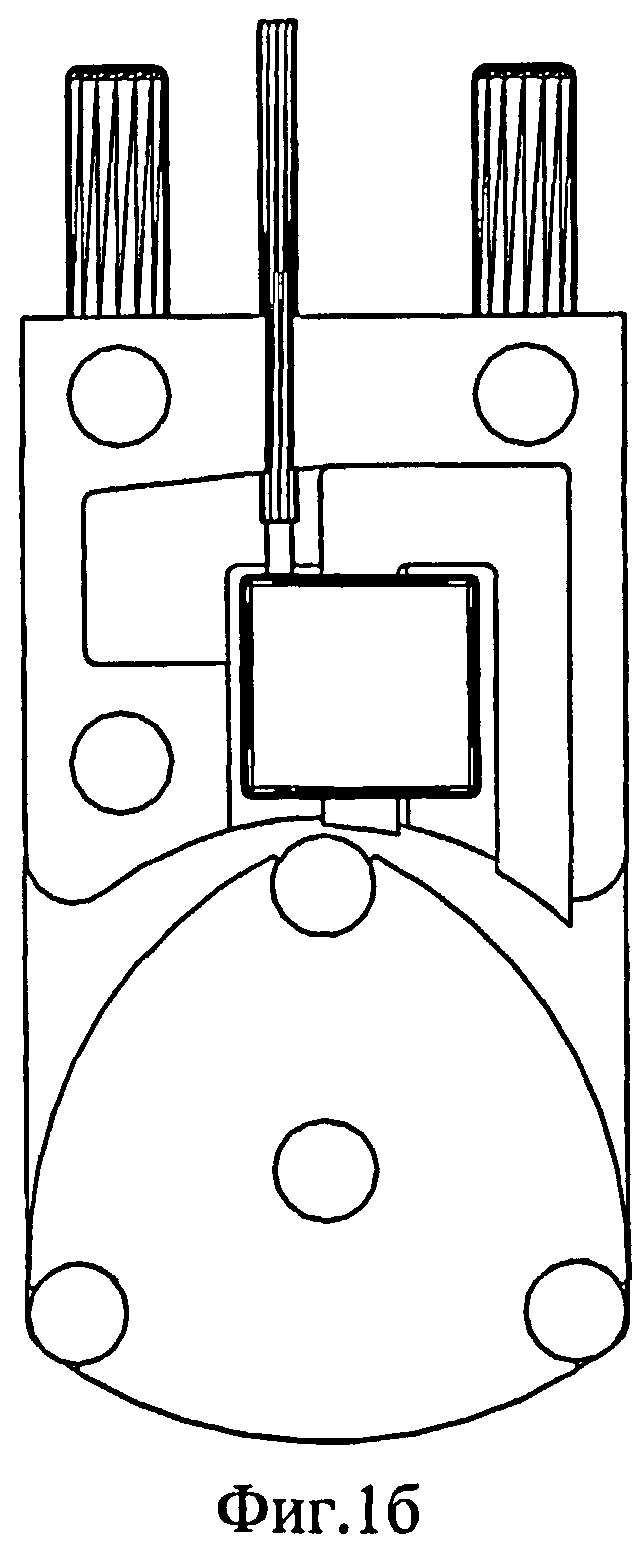
Основание содержит корпус 1, штифты 3 и гнезда 9 сопряжения приводов, элементы крепления 4 на сборочный узел, гнезда установки 7 выводов подключения 5, гнездо установки 6 статора, гильзу 18 установки ротора с размещенными на ее торцевой грани элементами 16 узла 22 механизма фиксации, и имеющей отверстие 19 для размещения пружины фиксации 20 и установки полуоси 10 вала ротора.
Ротор содержит корпус 13 с гнездами 12 для установки магнитопроводящих вставок 11, 11′, 14, шлицевой элемент 15 узла 22 механизма фиксации, полуось 10 вала. Для уменьшения веса и стоимости серийного производства в корпусе ротора имеются полости.
Статор содержит сердечник магнитопровода 2, обмотку управления 8 и выводы подключения 5.
Механизм фиксации 21, укрупненный вид которого представлен на фиг.1е, содержит обойму 18 вала 10 ротора, выполненную заодно с корпусом основания 1 и имеющую отверстие 19 для установки пружины 20, три узла фиксации 22, содержащих зубчатые выступы 16 на торце обоймы 18 и шлицевые элементы 15 на корпусе ротора, пружину 20. Внешний вид зубчато-шлицевой пары узла фиксации показан на рис.5а-5б.
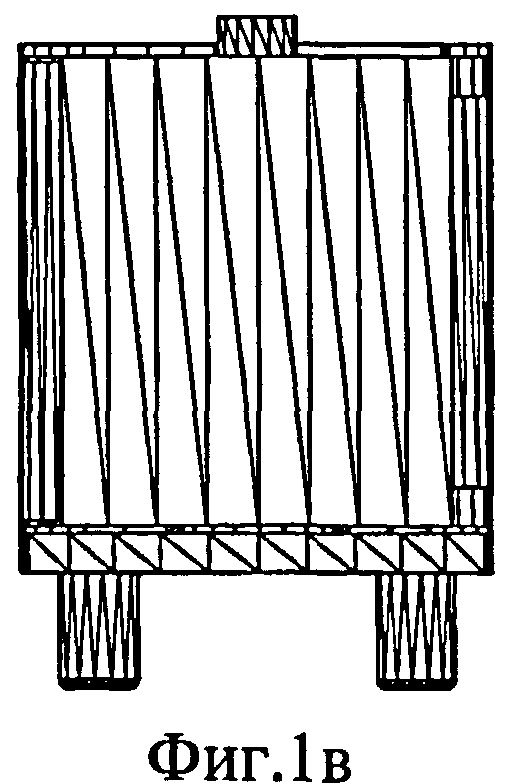
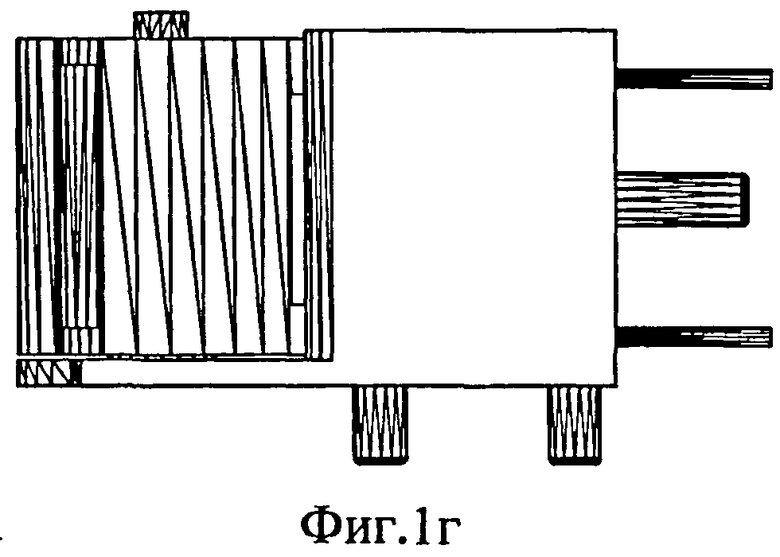
На фиг.1б-1г показаны виды устройства сверху, спереди и справа соответственно.
На фиг.1д показаны разрезы узлов устройства и принцип монтажа при сборке.
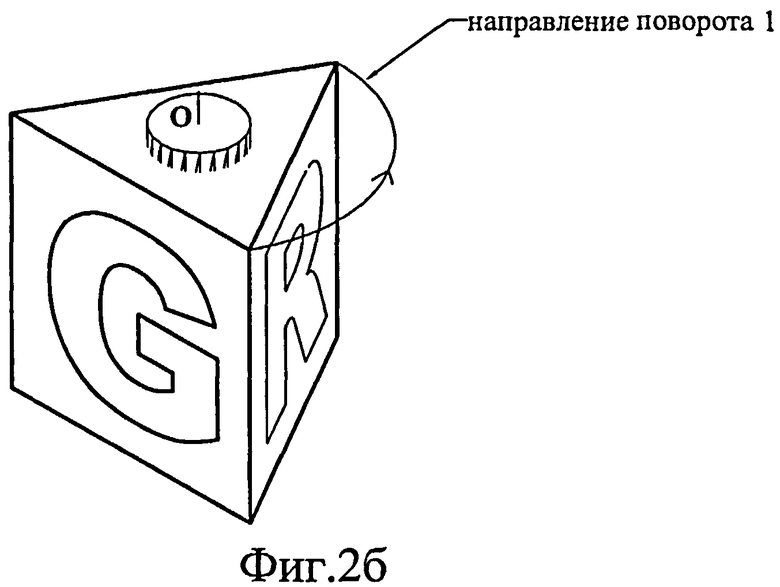
Работа устройства поясняется чертежами на фиг.2 - 5.
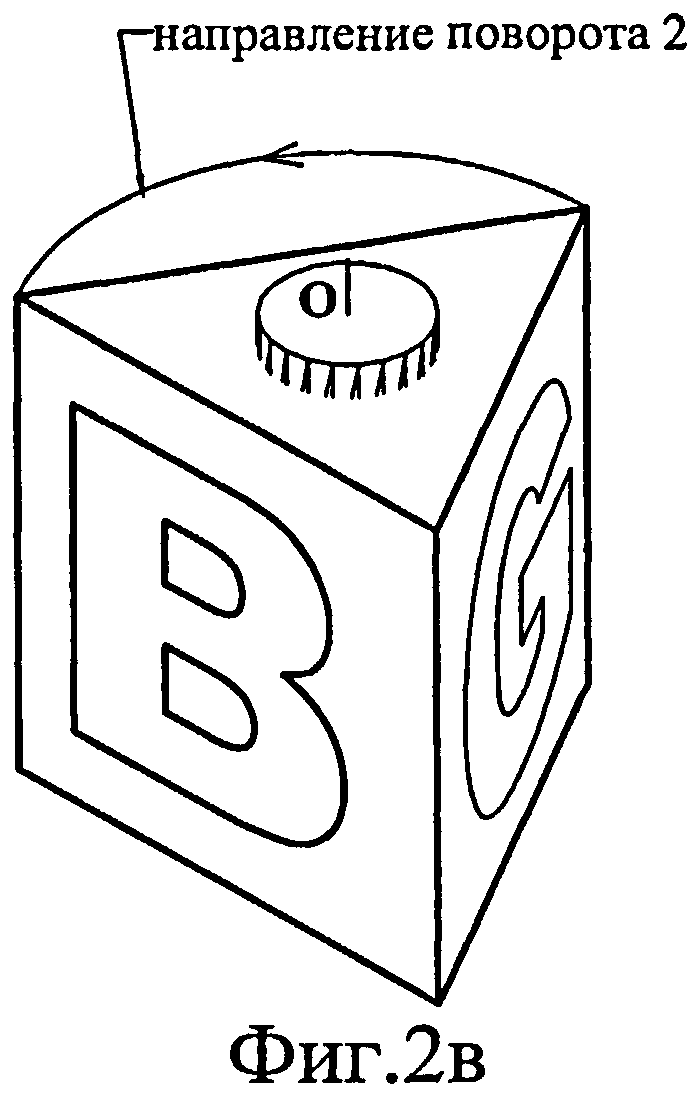
Рисунки на фиг.2 показывают общий принцип смены цвета элемента растрового изображения с помощью электромагнитного привода. В одном из статичных положений ротора соответствующая грань обращена к наблюдателю и выполняет роль элемента цветопередачи растрового изображения, на рис. а) - грань R красного цвета, расположенная вертикально и противоположно статору относительно оси поворота О. Две другие грани - G и В, зеленого и синего цвета, будут видны наблюдателю после поворота ротора в следующие статичные положения относительно оси О на фиксированный угол 120 градусов (рис.б и рис.в) за счет действия магнитного поля на ротор со стороны статора. Изображение приводится для варианта с вертикальной осью поворота ротора, принцип работы с горизонтальной осью аналогичен.
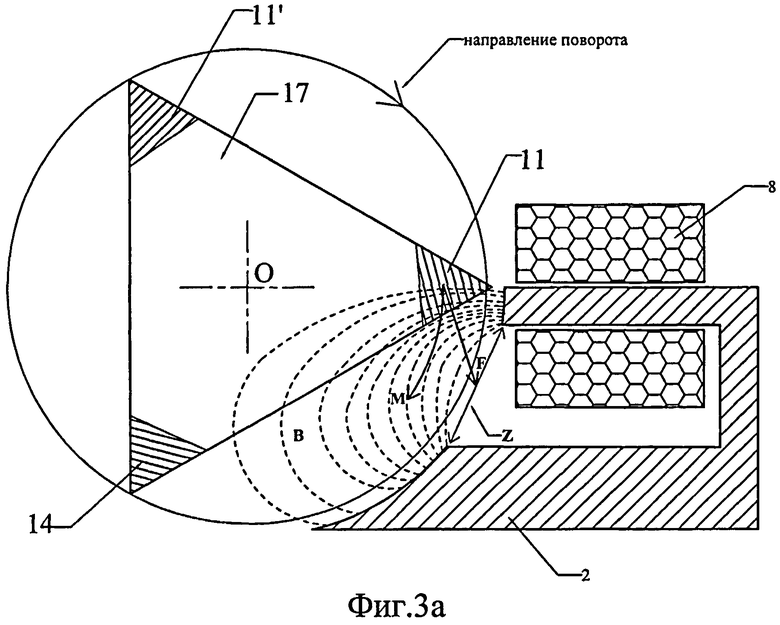
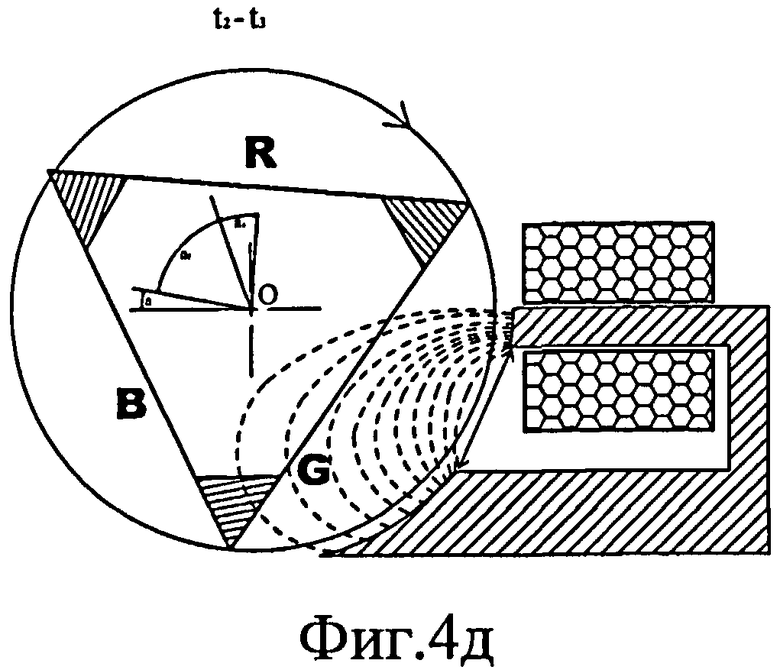
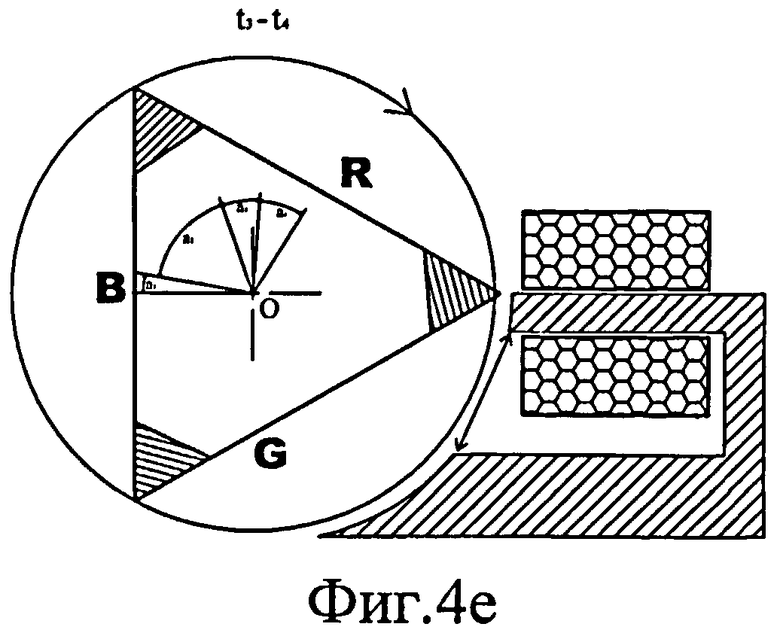
На фиг.3а и 3б показана схема электромагнитной системы, демонстрирующая принцип действия аксиального электромагнитного привода с тремя устойчивыми положениями ротора в форме прямой трехгранной призмы из материала-диамагнетика, вдоль боковых ребер которой в имеющихся гнездах располагаются магнитопроводящие элементы 11, 11′, 14; магнитопровод 2 статора выполнен с зазором Z, в котором при подаче на обмотку статора 8 управляющего сигнала возникает магнитное поле В, концентрация силовых линий которого максимальна в середине зазора, а внешние линии захватывают магнитопроводящий элемент 11, действие на который со стороны магнитного поля наибольшее по отношению к двум другим. На фиг.3а показано действие магнитного поля на элемент 11, смещенный против направления поворота относительно середины зазора на заданный угол, вызывающее силу F, направленную к середине зазора и создающую вращающий момент М, приводящий во вращение ротор, при этом сила F будет максимальна, а момент М минимален, когда элемент 11 находится на линии, соединяющей ось поворота и середину зазора, что приведет к остановке и фиксации ротора в середине зазора. Чтобы этого не произошло, управляющий сигнал необходимо снять в заданный момент времени, соответствующий максимальному вращающему моменту М. Так как элементы 11, 11′, 14 не имеют намагниченности, данная система не поляризована, и вектор силы F имеет направление всегда к середине зазора магнитопровода, т.е. по отношению к направлению поворота он меняет знак после прохождения магнитопроводящей вставкой ротора середины зазора. Это дает возможность с помощью однополярных управляющих импульсных сигналов осуществлять как разгон, так и торможение ротора. На фиг.3б показано положение ротора, в котором вращающий момент -М имеет противоположный по направлению вращения ротора знак, определяющийся положением ротора относительно зазора статора, когда сила -F со стороны магнитного поля на элемент 13 направлена против вращения ротора. Ввиду того, что в указанном положении внешние линии магнитного поля приближены как к элементу 11, так и к элементу 11′, магнитопровод 2 статора выполнен асимметричным, что позволяет получить конфигурацию поля, силовые линии которого имеют форму, отклоненную к элементу, расположенному по направлению движения ротора относительно середины зазора статора. Таким образом, воздействие поля будет большим на элемент 11 по сравнению с элементом 11′: /-F/>/F/, и на ротор будет действовать вращающий момент со знаком, противоположным направлению поворота ротора: /-М/>/М/, что приведет к затормаживанию ротора с заданной интенсивностью, соответствующей длительности управляющего воздействия и необходимой придания такой скорости ротору, чтобы обеспечивалось условие для гарантированной остановки ротора в статичном положении механизмом фиксации. Таким образом поворот ротора осуществляется за четыре такта: разгона - T1, соответствующего углу поворота α1, инерционного движения до момента торможения - Т2, соответствующего углу поворота α2, торможения - Т3, соответствующего углу поворота α3, инерционного движения до момента фиксации в устойчивое положение - Т4, соответствующего углу поворота α4.
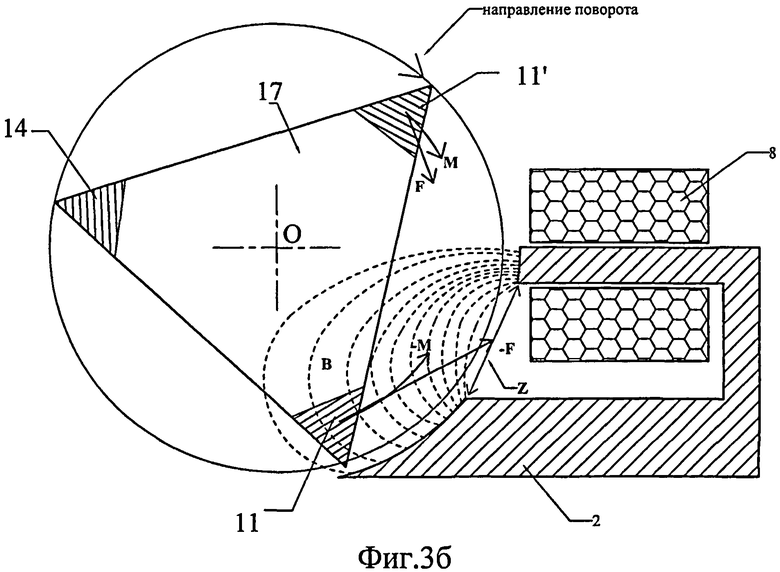
Для того чтобы обеспечить описанный режим поворота ротора, потребуется воздействие на обмотку статора сигнала, показанного на фиг.4а и представляющего собой последовательность двух импульсов: T1, соответствующего продолжительности такта T1 и определяющего интенсивность разгона, и Т3, соответствующего продолжительности такта Т3 и определяющего интенсивность торможения. Длительность промежутка между ними Т2 определяет положение ротора в точке начала торможения и соответствует продолжительности такта Т2. Длительность указанных временных интервалов подбирается расчетным путем исходя из массогабаритных и конструкционных параметров деталей и применяемых материалов, и уточняется экспериментально. При определенных настройках электромеханической системы ее действие может осуществляться в отсутствие такта торможения, т.е. при Т3=0. Для задаваемых параметров ускорений и их временного распределения возможно применение широтно-импульсной модуляции сигнала, чем можно обеспечить более мягкие режимы разгона и торможения ротора.
Фиг.4б демонстрирует положение ротора в момент времени t0, соответствующее началу такта T1 поворота ротора, фиг.4в - положение ротора в момент времени t1, соответствующее началу такта Т2, когда значения вращающего момента М максимально, фиг 4г - положение ротора в момент времени t2, соответствующее началу такта Т3, фиг.4д - положение ротора в момент времени t3, соответствующее началу такта Т4, фиг.4е - положение ротора в момент времени t4, соответствующее завершению поворота.
Режим работы привода с замедлением вращения с помощью магнитного поля позволяет обеспечивать ротору повышенные значения разгоняющего ускорения, что снижает зависимость характера движения ротора относительно корпуса от различия свойств материалов в узлах трения, характеристик электромагнитной системы, точности выполнения деталей и в целом повышает быстродействие работы устройства.
Для возможности осуществления анализа положения ротора в тестовом режиме системы управления одна из магнитопроводящих вставок ротора, здесь - 12, имеет отличные от других магнитные свойства либо за счет использования другого типа материала, либо за счет других геометрических характеристик.
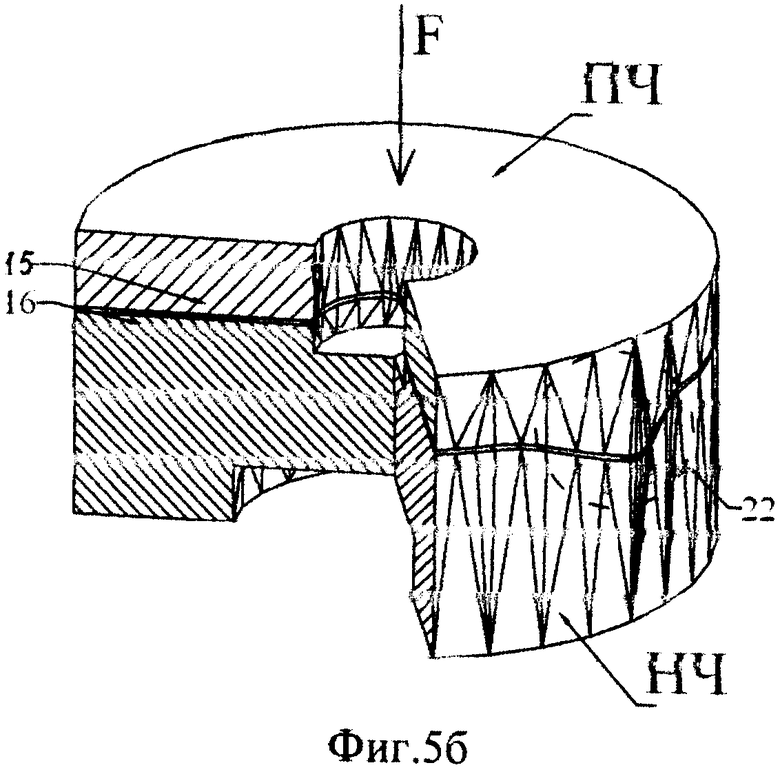
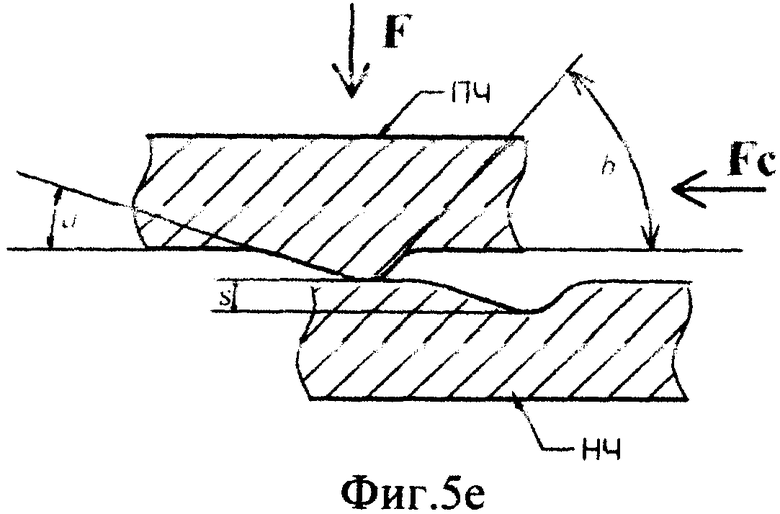
На фиг.5а-5б показан внешний вид элементов механизма фиксации (для наглядности элементы разнесены), содержащего подвижную часть ПЧ, выполненную заодно с корпусом ротора 13 (фиг.1а) и имеющую три шлицевых элемента 15, неподвижную часть НЧ, выполненную заодно с корпусом основания 1 (фиг.1а) и имеющую три зубчатых элемента 16. На фиг.5в показан принцип работы узла фиксации механизма фиксации ротора в режиме статичного состояния, когда зубчато-шлицевые элементы 15 и 16 находятся в зацеплении. Форма зубчатых выступов и шлицев обеспечивает беспрепятственное движение подвижной части, ее скачкообразный вход в устойчивое относительно неподвижной части положение, фиксацию на неограниченное время в этом положении и свободный, достаточный для силы Fc, действующей со стороны магнитного поля статора на ротор, выход из устойчивого положения в направлении движения, совпадающего с направлением вектора силы Fc. Усилие фиксации подвижной части в узле фиксации обеспечивается силой F, равной сумме веса подвижной части и силе сжатия пружины 20, коэффициентом трения в узле и углом α в направлении движения, углом β в направлении против движения. При этом время выхода из устойчивого положения прямо пропорционально массе подвижной части, силе сжатия пружины и коэффициенту трения в узле и обратно пропорционально мощности импульса управляющего воздействия. На фиг.5 г показан тот же узел в статичном режиме, у которого зубчатые элементы выполнены на подвижной части.
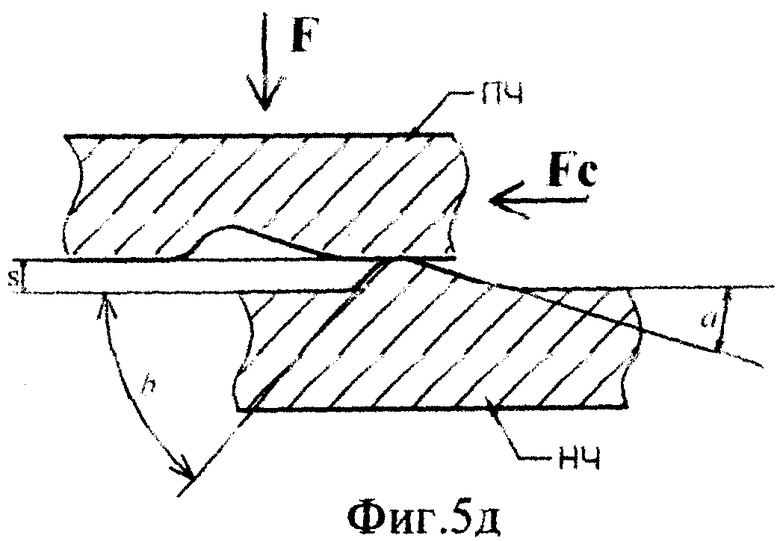
На фиг.5д показано положение ротора в режиме движения, при выходе в который подвижная часть (ротор) приподнимается на расстояние s, соответствующее высоте зубчатого выступа, и находится в этом положении на время движения до следующего статичного положения. Величины углов и профиль элементов узла фиксации необходимо установить сначала расчетным, по коэффициентам трения используемых материалов и конструктивным параметрам узла фиксации, а затем опытным путями для обеспечения оптимального режима начала движения и фиксации по направлению и против направления движения, при этом углы α и β могут быть равными. На фиг.5е показан принцип работы узла, у которого зубчатые элементы выполнены на подвижной части.
Работа узла фиксации в таком конструктивном исполнении сопровождается, как указывалось, перемещением подвижной части в осевом направлении на расстояние S, равное высоте зубчатого выступа. В случае принципиальной недопустимости данного свойства работы устройства, потребуется выполнение элементов подвижной части механизма фиксации раздельно от корпуса ротора, обеспечив им подвижность вдоль вала ротора, при этом устройство может работать только с использованием силы сжатия упругого элемента механизма фиксации. Данный принцип работы и конструкция механизма фиксации поясняется рисунками на фиг.6а-6б, на которых показан сборочный чертеж и разрез. Отличием является наличие подвижного элемента 23 в виде шайбы с зубчатыми выступами 15 узлов фиксации 22, упорными вырезами 24 фиксации пружины 20, запрессованной в корпус ротора 13. Шайба 23 прижимается пружиной 20 к обойме 18 корпуса основания 1, имеющей на торце шлицевые элементы 16 узлов фиксации 22, усилие прижима обеспечивает необходимое усилие фиксации в механизме, а сама шайба имеет степень свободы перемещения вдоль оси поворота ротора, но зафиксирована от проворачивания относительно ротора с помощью упорного выреза 24, при этом ротор не имеет степени свободы перемещения в осевом направлении.
На фиг.7а-7б показан принцип построения гравитационного узла фиксации с горизонтальной осью. Корпус основания 1 содержит посадочное отверстие 25 с шлицевым вырезом 28, куда устанавливается вал 26 ротора 13 с тремя зубчатыми выступами 27, усилие фиксации обеспечивается за счет силы тяжести ротора Fт. Фиг.7а показывает положение ротора в устойчивом состоянии, при этом положение оси ротора смещено вниз и вбок относительно оси поворота на расстояния s1 и s2, фиг.7б - положение ротора в режиме поворота, при выходе в который под воздействием магнитного поля статора ротор выходит из фиксации и приподнимается по профилю шлицевого выреза на расстояние s1, и ось О2 вала ротора совпадает с осью отверстия O1. Однако такая конструкция привода целесообразна только в случае необходимости использования именно гравитационного варианта устройства с горизонтальной осью поворота ротора и упрощения изготовления технологической оснастки для серийного производства, каких-либо иных преимуществ она не имеет.
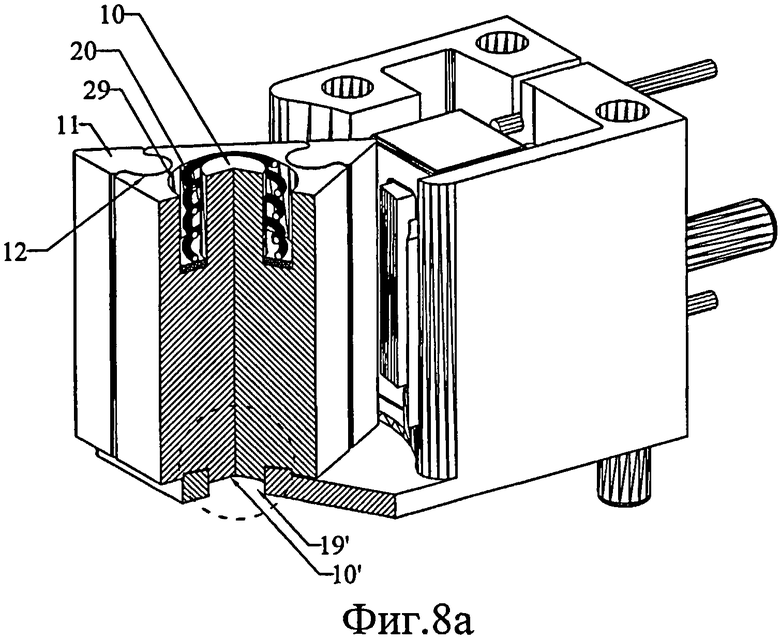
На фиг.8а-8г показана конструкция привода с ротором, у которого боковые грани имеют плоскую поверхность, а магнитопроводящие вставки 11 и гнезда 12 под них специальный профиль поперечного сечения. Также рисунки демонстрируют иной вариант исполнения механизма фиксации, позволяющего несколько упростить изготовление оснастки для гравитационного механизма фиксации. Отличие заключается в наличии двух полуосей вала ротора 10 и 10′ равного диаметра, отверстия 19′ для установки полуосей, выборки 29 для установки при работе устройства в горизонтальном положении пружины 20.
















Изобретение относится к области электротехники, в частности к электроприводам и средствам индикации, и может быть использовано в качестве элемента передачи единицы информации растровых изображений больших форматов. Сущность изобретения состоит в следующем. Предлагаемый электропривод содержит трехгранный ротор, имеющий ось поворота, проходящую через центр масс параллельно граням, и статор с неизменным положением полюсов, расположенный аксиально по отношению к ротору, с магнитным зазором, середина которого смещена относительно центра поворота на заданный угол в направлении поворота, образующие аксиальную электромагнитную систему, позволяющую управлять положением граней ротора с помощью однополярного импульсного воздействия. Привод снабжен механизмом фиксации ротора, обеспечивающим устойчивость ротора в одном из трех статичных положений, при котором одна из граней ротора всегда обращена в сторону, противоположную от статора относительно оси поворота, и выполняет роль элемента передачи единицы цветовой информации растрового изображения с помощью нанесенного на нее цветного покрытия необходимого оттенка. Технический результат, достигаемый при использовании данного изобретения, состоит в создании тристабильного механического элемента отображения цветовой информации растрового изображения с механической памятью статичного положения и возможностью управления сменой положений с помощью однополярного импульсного сигнала, в значительном упрощении промышленного исполнения за счет конструктивного интегрирования узлов и деталей привода и использования веса элементов для создания усилий фиксации подвижной части, а также в обеспечении возможности непрерывного контроля параметров аксиальной электромагнитной системы привода за счет асимметрии ее свойств для определения положения элемента, соответствующего одному их трех основных цветов используемой цветовой системы. 1 з.п. ф-лы, 31 ил.
1. Электромеханический привод трехцветной индикаторной головки элемента растрового изображения, содержащий основание с гнездами для установки статора, ротора и выводов подключения, статор с магнитопроводом и обмоткой и ротор, расположенные аксиально и обеспечивающие поворот ротора на фиксированный угол, выводы для запайки в печатную плату и элементы крепления на печатную плату, отличающийся тем, что привод снабжен механизмом фиксации ротора, содержащим зубчатые и шлицевые элементы, расположенные под углом 120° на валу ротора и на корпусе основания, с профилем, обеспечивающим устойчивую фиксацию в одном из трех статичных положений, соответствующих одному из цветов элемента растрового изображения в отсутствие импульсного управляющего сигнала, стабильный выход из этого положения в начало поворота при подаче сигнала и гарантированный вход в статичное положение из режима поворота при снятии управляющего сигнала, при этом усилие фиксации задается весом ротора; ротор выполнен в виде прямой трехгранной призмы, ось вращения которой перпендикулярна граням основания и может быть вертикальной или горизонтальной, а вдоль боковых ребер имеются гнезда для установки ферромагнитных вставок, предназначенных для образования магнитной системы статор-ротор, одна из которых имеет отличающиеся от других магнитные свойства, что обеспечивает индивидуальность магнитных свойств системы статор-ротор для одного из статичных положений ротора, что обеспечивает возможность анализа положения ротора; боковые грани призмы ротора имеют выпуклую или прямую поверхность, окрашены в заданные цвета и выполняют роль элемента цветопередачи растрового изображения; магнитопровод статора имеет зазор заданной ширины, расположенный параллельно боковым граням ротора и смещенный в направлении поворота на заданный угол от местоположения вставки, находящейся противоположно видимой грани, формирующий магнитное поле заданной конфигурации, воздействующее на магнитопроводящую вставку ротора с вектором силы, меняющим направление в зависимости от положения ротора относительно середины зазора.
2. Устройство по п.1, отличающееся тем, что усилие фиксации в механизме фиксации ротора обеспечивается совокупным действием силы тяжести ротора и упругого элемента, устанавливаемого между ротором и основанием в предназначенном для этого гнезде в корпусе ротора соосно валу ротора при вертикальном положении оси, или только силой упругого элемента при горизонтальном положении оси.
| УСТРОЙСТВО ИНДИКАЦИИ В ВИДЕ ЭЛЕКТРОДВИГАТЕЛЯ-БЛЕНКЕРА | 1988 |
|
RU2020607C1 |
| Устройство для измереия координатных перемещений | 1980 |
|
SU879259A1 |
| Магнето | 1934 |
|
SU49641A1 |
| РЕКЛАМНО-ДЕМОНСТРАЦИОННОЕ УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ ДЕМОНСТРАЦИИ РЕКЛАМНЫХ МАТЕРИАЛОВ | 2007 |
|
RU2372669C2 |
| RU 97101125 А, 20.02.1999 | |||
| Переносная кормушка | 1986 |
|
SU1323059A1 |
| US 6434868 В1, 20.08.2002 | |||
| WO 9211621 А1, 09.07.1997. | |||

