Область техники, к которой относится изобретение
Изобретение относится к электроприводам и средствам индикации.
Уровень техники
Известно устройство индикации в виде электромеханического привода трехцветной индикаторной головки элемента растрового изображения (патент РФ №2446547), содержащее трехгранный ротор, двухзубцовый однофазный статор, зубчато-шлицевое устройство фиксации с тремя положениями фиксации. Устройство имеет три устойчивых состояния индикаторной головки в форме трехгранной призмы с нанесенными пятнами цветовой индикации на гранях, отличается однобитовым характером индикации в силу единственно возможной установки положений ротора в каждой фазе состояний, отсутствием механизма установки начального положения и большой вероятностью ошибок при работе из-за наличия участка перемещения ротора, соответствующего неопределенному состоянию системы.
Технический результат, на достижение которого направлено изобретение, заключается в создании электромеханического привода с механизмом фиксации ротора, обеспечивающим пошаговую избирательность привода к величине импульсной мощности управляющего воздействия за счет различных значений моментов пошаговой фиксации, что позволяет использовать амплитудно-временной алгоритм управления устройством отображения растровой информации, обеспечивающий увеличение его быстродействия и гарантированную очистку информации.
Другой технический результат заключается в создании шагового электромеханического привода, имеющего двухтактный режим выполнения шага при однофазном однополярном импульсном управляющем воздействии, исключающий участки неопределенности положения ротора при смене фаз положения, чем достигается безошибочность выполнения шага при достаточной малости угловой величины шага, что обеспечивает высокую точность передачи растра при выводе на устройство отображения информации.
Другой технический результат заключается в создании электропривода с малой чувствительностью к колебаниям импульсной мощности управляющих воздействий, что обеспечивает лучшую стабильность характеристик во времени и при изменении условий окружающей среды, помехозащищенность устройства отображения растровой информации.
Раскрытие изобретения
Для достижения указанных технических результатов предложен шаговый электромеханический привод, содержащий статор, ротор и многозубцовый механизм фиксации ротора, вместе образующие электромеханическую систему привода, размещенные на основании, имеющем гнезда установки элементов магнитопровода статора, ось ротора или гнезда для ее установки, гнездо установки полумуфты механизма фиксации или непосредственно элементы полумуфты.
Статор имеет магнитопровод с двумя полюсами, каждый из которых может иметь один или более зубцов, и однофазную обмотку.
Ротор имеет корпус с установленными полумуфтами механизма фиксации или непосредственно элементы полумуфты, выполненные заодно с ним, гнездо установки силового элемента механизма фиксации и замкнутый многозубцовый магнитопровод, внешние поверхности корпуса и магнитопровода окрашены в необходимые цвета или цветовой градиент и выступают в роли индикаторного элемента отображения цветовой информации.
Вместе магнитопровод и катушка статора с магнитопроводом ротора образуют электромагнитную систему привода.
Механизм фиксации состоит из многозубцовой многорядной пары полумуфт, подвижной одна относительно другой по оси вращения, ряды которой расположены коаксиально на заданных радиальных расстояниях друг от друга, а зубцы имеют несимметричный заостренный профиль, для одной полумуфты являющийся аксиальным отпечатком другой, и расположены с угловым шагом привода, силового элемента фиксации, в роли которого может выступать пружина сжатия или пара постоянных магнитов, подвижная полумуфта соединена с ротором, а неподвижная со статором и соответственно могут быть выполнены заодно с корпусами ротора и статора, что упрощает практическое исполнение.
Вместе механизм фиксации и корпус ротора с размещенным на нем магнитопроводом образуют механическую систему привода.
Результат достигается наличием по меньшей мере двух, или более при необходимости, рядов зубцов полумуфт фиксации, отличающихся своим радиальным положением, которое определяет величину момента фиксации, при этом для каждого шага должен быть определен хотя бы один зубец на одном из рядов, при их большем числе для каждого шага величина момента определяется наибольшим моментом, соответствующим большему радиусу ряда.
Другой результат достигается заданной угловой разностью между аксиальной плоскостью, в которой находится ребро зубца неподвижной полумуфты статора, и плоскостями симметрии зубца магнитопровода статора и зубца магнитопровода ротора, при этом ребро зубца полумуфты ротора лежит в плоскости симметрии зубца магнитопровода ротора, а ребро зубца полумуфты статора лежит в плоскости, смещенной от плоскости симметрии зубца магнитопровода статора против направления поворота на заданный угол, что обеспечивает однонаправленность векторов крутящего момента электромагнитного взаимодействия и крутящего момента, создаваемого за счет потенциальной энергии, запасенной механической системой.
Другой результат достигается способностью механической системы находиться в положении, соответствующем состоянию электромагнитного равновесия электромагнитной системы сколь угодно долго до окончания управляющего воздействия независимо от его величины, обеспечивая завершение автоколебательных процессов уравновешивания механической системы, чем обеспечивается нечувствительность привода к колебаниям величины воздействия.
Работа привода характеризуется двухтактным режимом выполнения шага и двумя устойчивыми состояниями электромеханической системы, первый такт осуществляется за счет действия магнитных сил между зубцами статора и ротора электромагнитной системы, приводящих ее в состояние устойчивого равновесия, второй такт осуществляется за счет запасенной в первом такте потенциальной энергии механической системой и приводящей ее в состояние устойчивого равновесия. В первом такте происходит выход ротора из текущего устойчивого состояния механической системы с переходом в устойчивое состояние электромагнитной системы в точке максимума силовых линий магнитного поля и нахождение в этом состоянии до окончания управляющего воздействия для возможности завершения периодических процессов уравновешивания механической системы, во втором такте за счет запасенной потенциальной энергии происходит переход из устойчивого равновесного состояния электромагнитной системы в следующее устойчивое состояние механической системы. Механизм фиксации обеспечивает фиксацию механической системы в ее устойчивом состоянии и направление поворота ротора при выходе электромагнитной системы из ее устойчивого состояния, а также отличающиеся в заданных пределах моменты фиксации механической системы в устойчивом состоянии по меньшей мере в одном из шагов ротора, что обуславливает избирательность привода к величине управляющих воздействий.
Краткое описание чертежей
На фиг.1 показан общий вид электромеханического привода.
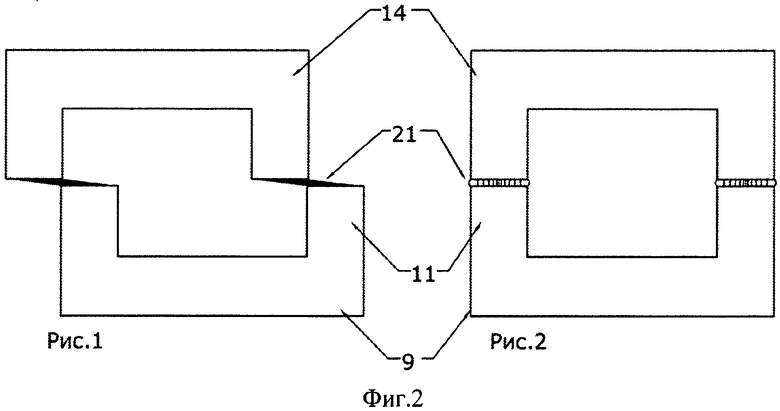
На фиг.2 показан принцип электромагнитного взаимодействия в системе ротор-статор.
На фиг.3 показаны возможные неопределенные состояния электромагнитной системы.
На фиг.4 показаны теоретический профиль зубца фиксации и вариант конструктивного исполнения.
На фиг.5 показаны линейные развертки элементов электромагнитной системы и механической системы привода.
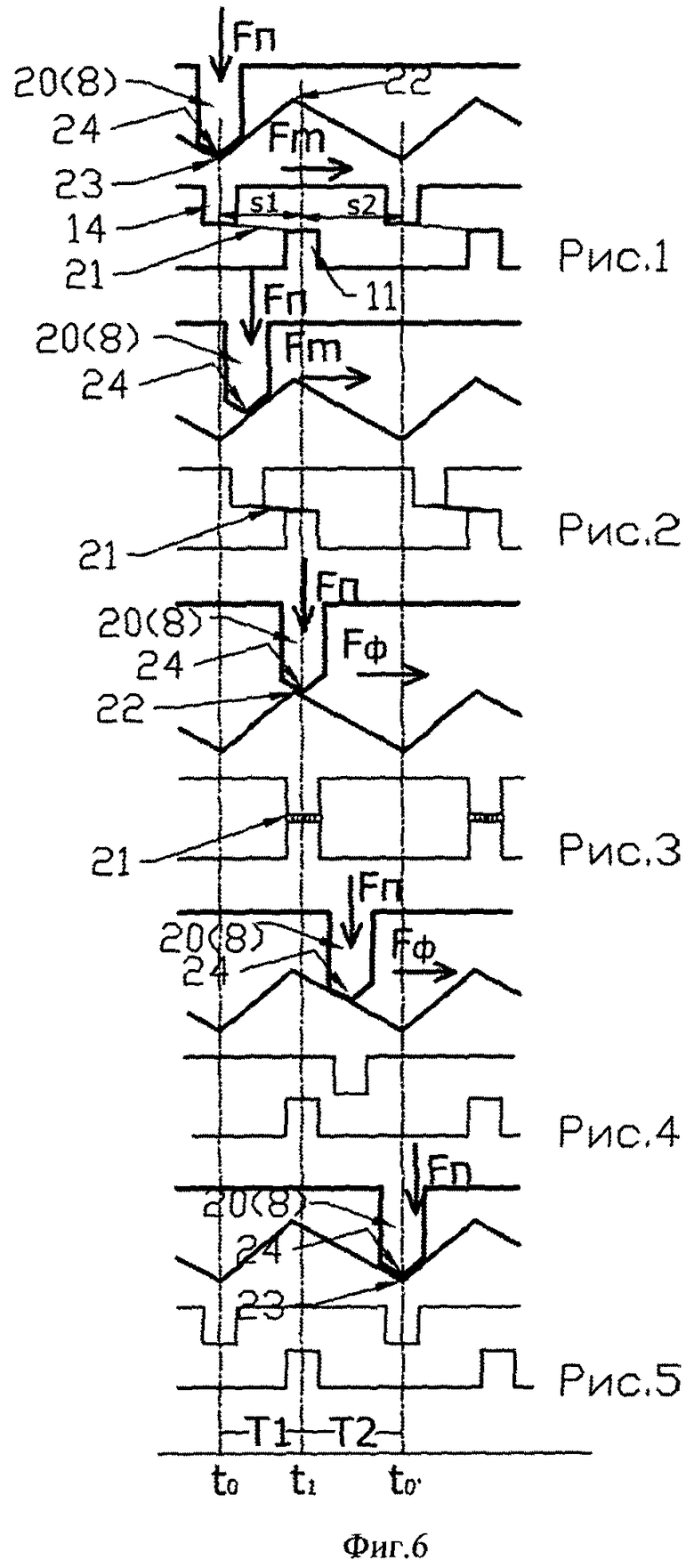
На фиг.6 показаны диаграммы процессов движения ротора в направлении действующих результирующих сил.
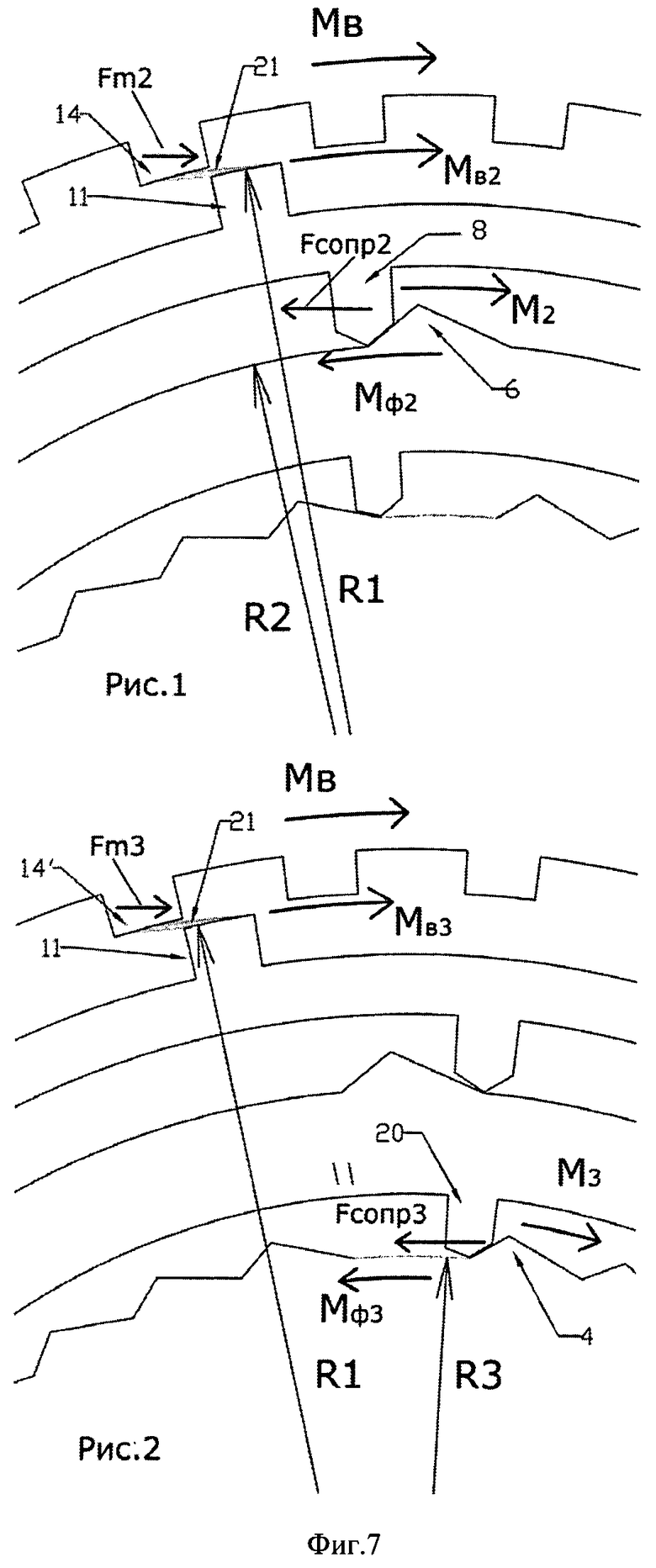
На фиг.7 показаны диаграммы, демонстрирующие принцип получения различающихся моментов фиксации.
Осуществление изобретения
Общая конструкция привода поясняется рисунком на фиг.1., где представлена схематичная аксонометрическая сборка входящих деталей.
Основание 1 показано условно и служит для углового и линейного позиционирования и закрепления компонентов привода и может содержать любые другие элементы, такие как ребра жесткости, стенки, выступы, гнезда и т.п., интегрированные в общую конструктивную систему конечного устройства, где используется привод.
Ротор (показан в разрезе) содержит корпус 15 и многозубцовый магнитопровод 16, на внешние поверхности которого наносится цветовое покрытие 17, имеющий зубцы 14. В корпусе 15 имеется отверстие 19 для размещения оси 2 и гнездо 18 установки пружины 13.
Статор содержит однофазную обмотку 12 и двухполюсный сердечник 9 с полюсами 10, на которых находятся зубцы 11.
Механизм фиксации ротора содержит неподвижную многозубцовую полумуфту 3, состоящую из основного ряда радиальной последовательности идентичных зубчатых выступов 4, одного или более дополнительных рядов радиальной последовательности идентичных зубчатых выступов 5, количество и положение которых определяется условиями применения устройства, и дополнительного ряда, имеющего один выступ 6, расположенных на заданных радиальных расстояниях от оси поворота; подвижную многозубцовую полумуфту 7, состоящую из основного ряда радиальной последовательности идентичных зубчатых выступов 20 и дополнительного зубца 8, имеющего радиальную длину, соответствующую радиальному положению зубца 6; пружину сжатия 13. Неподвижная полумуфта 3 крепится на основании 1, подвижная полумуфта 7 крепится на корпусе 15 ротора и могут быть выполнены заодно с основанием и корпусом ротора соответственно, что упрощает изготовление.
Работа устройства поясняется чертежами на фиг.2-7.
Сам принцип электромагнитного взаимодействия в системе ротор-статор аналогичен таковому в шаговых двигателях, как это показано на фиг.2, где на рис.1 «натянутые» силовые линии 21 магнитного поля между зубцами 14 магнитопровода ротора и зубцами 11 магнитопровода 9 статора стремятся принять форму наиболее прямую и короткую, как это показано на рис.2, что в итоге создает крутящий и удерживающий моменты. Для однофазной реактивной электромагнитной системы, реализующей принцип импульсно-шагового управления, характерно наличие двух неопределенных состояний, самостоятельно выйти из которых в заданном направлении система не сможет. На фиг.3 показаны такие состояния электромагнитной системы. Состояние на рис.1 соответствует положению ротора, когда зубцы 14 магнитопровода 16 ротора равноудалены от прилегающих зубцов 11 статора: s1=s2, магнитные силовые линии 21 имеют вероятностно равную длину и натяжение, что означает равную вероятность движения зубца ротора к любому из зубцов статора. Состояние на рис.2 соответствует уравновешенному состоянию электромагнитной системы, и выход из этого состояния в случае с однофазной реактивной электромагнитной системой привода невозможен с ее помощью, а возможен с помощью внешнего воздействия.
Исходя из анализа состояний электромагнитной системы, предлагается механизм фиксации, обеспечивающий исключение состояний неопределенности системы за счет специального геометрического профиля элементов фиксации и их положения относительно элементов электромагнитной системы. Механизм состоит из неподвижной части, подвижной части и элемента усилия фиксации. Неподвижная часть состоит из радиальной зубчатой последовательности, теоретический профиль зубца 4 которой показан на фиг.4, рис.1, где условно показаны два зубца: 4 и 4', чтобы отметить наличие ребер 22 и 22' и межзубцовых впадин 23 и 23', являющихся точками потенциальных барьеров для движения подвижной части механизма. Последовательность характеризуется периодом Т, соответствующим шагу привода, расстояниями с и с' между выступами и впадинами, определяющими положение точек потенциальных барьеров механизма фиксации относительно точек неопределенности электромагнитной системы. Углы профиля α и β зависят от высоты профиля и определяют баланс сил в механизме и его энергетические характеристики. Подвижная часть механизма фиксации может иметь аналогичный профиль, являющийся его аксиальным отпечатком, с одним зубцом или более, а может иметь иной профиль, удовлетворяющий условиям технологичности и износоустойчивости, т.к. в процессе работы профили взаимно будут притираться и примут подобные очертания. Усилие фиксации может создаваться пружинным или магнитным элементами, а также силой тяжести ротора, если его ось вертикальна. На рис.2, фиг.4 показан предпочтительный профиль зубцов 4 и 4', обеспечивающий необходимую относительно траектории их перемещения дискретизацию создаваемых моментов фиксации и вращения.
На фиг.5 на линейных развертках элементов электромагнитной системы и механической системы привода показано взаимное расположение ребер зубцов полумуфт фиксации относительно плоскости симметрии зубцов магнитопровода ротора и плоскости симметрии зубцов магнитопровода статора, демонстрирующее принципиальное отличие, обеспечивающее достоверную работу привода и лежащее в основе изобретения: если ребро 24 зубца 20 (8) подвижной части механизма фиксации и ребро 23 межзубцовой впадины неподвижной части механизма фиксации лежат в плоскости симметрии зубца 14 магнитопровода ротора, то расстояние а между ней и плоскостью симметрии зубца 11 магнитопровода статора должно быть меньше расстояния b между ней и плоскостью симметрии межзубцового промежутка ротора, расположенного по направлению действия магнитной силы, на заданную величину δ, и больше расстояния с между ребром 22 зубца 4 (5, 6) неподвижной части механизма фиксации и его проекцией на плоскость симметрии зубца 14 магнитопровода ротора на заданную величину σ. Данное условие будет обеспечивать постоянство направления результирующего вектора силы, создающей крутящий момент ротора, в любой момент времени и в любой точке траектории.
Распределение сил, принимающих участие в происходящих процессах преобразования энергии в механической системе, соответствует таковому для движения тел по наклонным плоскостям и поверхностям. На фиг.6, рис.1-5, показаны линейные развертки взаимодействующих элементов электромагнитной и механической систем привода, демонстрирующие процесс движения ротора в направлении действующих результирующих сил. Шаг ротора происходит в два такта, в первом, промежуток времени t0-t1, движение осуществляется за счет действия силы Fm магнитного поля статора, во втором, промежуток времени tl-t0', за счет действия силы Fп со стороны силового элемента механизма фиксации и веса ротора, если его ось вертикальна. На рис.1 показан ротор в исходном устойчивом положении в момент t0 начала действия магнитного поля, при этом между зубцами 14 ротора и зубцами 11 статора возникает магнитный поток 21, имеющий большее значение для условия s1<s2, для которого направление действия силы Fm строго определено, приводящий ротор в движение и исполнение такта Т1, рис.2, по завершении которого в момент времени t1 ротор занимает положение равновесия магнитного взаимодействия и неустойчивости механического равновесия, в котором может находиться требуемое время до прекращения действия магнитного поля в заданном диапазоне временных и амплитудных величин удерживающего воздействия, рис.3, после чего начинается такт Т2 и за время его действия t1-t0' ротор совершает движение в направлении, которое определяется положением ребра 24 зубца 20 (8) относительно ребра 22 зубца 4 (5, 6) в момент времени t1, действия силы Fϕ, возникающей за счет действия силы Fп со стороны силового элемента механизма фиксации, рис.4, до момента времени t0', рис.5, когда ротор приходит в следующее устойчивое положение и может находиться в нем сколь угодно долго, если к нему не приложено воздействие.
Принцип получения различающихся моментов фиксации на примере двух отдельных шагов демонстрируется фиг.7. Ротор приводится во вращение моментом Мв=Fm*R1 со стороны статора за счет силы Fm (Fm2 и Fm3 здесь имеют смысл разной величины) магнитного поля 21 в зазоре между зубцами ротора 14 и зубцами 11 статора, располагающегося по радиусу R1. Для выхода из показанного на рис.1 положения устойчивого состояния потребуется создать момент М2 для преодоления момента фиксации Мϕ2=Fсопр2*R2, создаваемого силой сопротивления Fсопр2 в зубчатой паре 8 и 6 внешнего зубцового ряда с радиусом R2, а для выхода из показанного на рис.2 положения потребуется создать момент М3 для преодоления момента фиксации Мϕ3=Fсопр3*R3, создаваемого силой сопротивления Fсопр3 в зубчатой паре 20 и 4 внутреннего зубцового ряда с радиусом R3. Для одинаковых характеристик пар фиксации Fсопр2≈Fсопр3, Мϕ2/Мϕ3≈R2/R3, a MB2/Mв3≈R2/R3≈Fm2/Fm3. Сила магнитного поля Fm напрямую связана с мощностью управляющего воздействия, что означает наличие избирательности на данный параметр и дискретной чувствительности привода.
Практическое осуществление изобретения возможно с использованием технологии литья деталей из пластмасс, металлических деталей методом холодной штамповки, сборка изделия технологически возможна с использованием поточной конвейерной линии или автоматической линии.



Изобретение относится к электротехнике, к электроприводам и средствам индикации и может быть использовано в качестве элемента передачи единицы цветовой информации растровых изображений. Электропривод содержит многозубцовый ротор, внешняя поверхность которого одновременно выполняет роль элемента отображения цветовой информации, соответствующей текущему положению ротора, однофазный двухполюсный многозубцовый статор. Механизм фиксации ротора образован расположенными коаксиально на заданных радиальных расстояниях от оси рядами зубцов с угловым расположением зубцов, соответствующим шагу привода, определяющих различие моментов фиксации по крайней мере в одном из шагов и, тем самым, избирательность привода к величине управляющего воздействия. Ребра зубцов расположены в аксиальных плоскостях, положение которых относительно плоскостей симметрии зубцов электромагнитной системы обеспечивает двухтактный режим исполнения шага и одинаковое направление поворота ротора в каждом из тактов. Технический результат состоит в повышении точности отображения, быстродействия, временной и климатической стабильности и помехоустойчивости, а также в обеспечении гарантированной очистки растра при отображении цветовой многоуровневой растровой информации. 7 ил.
Высокоточный однофазный шаговый электромеханический реактивный привод многопозиционной индикаторной головки элемента растрового изображения, содержащий статор с двухполюсным магнитопроводом и однофазной обмоткой, ротор с магнитопроводом, внешняя поверхность которого окрашена в заданные цвета и выполняет роль элемента отображения цветовой информации растрового изображения, механизм фиксации ротора с силовым элементом и зубчатыми полумуфтами зацепления, отличающийся тем, что зубцы полумуфт образуют два или более коаксиальных ряда, радиальное положение которых определяет отличие величины момента фиксации по меньшей мере хотя бы для одного шага от остальных, а для каждого шага должен быть определен хотя бы один зубец на одном из рядов, ребро зубца полумуфты ротора лежит в плоскости симметрии зубца магнитопровода ротора, а ребро зубца полумуфты статора в плоскости, смещенной на заданный угол от плоскости симметрии зубца магнитопровода статора против направления поворота, и такое их взаимное положение обеспечивает при однофазном однополярном импульсном воздействии двухтактное выполнение шага, осуществляя в первом такте за счет действия электромагнитных сил переход из устойчивого положения ротора в промежуточное, соответствующее уравновешенному состоянию электромагнитной системы привода, и в котором находится до уравновешивания механической системы привода требуемое время, во втором такте за счет запасенной в первом механической системой потенциальной энергии однонаправленный переход в следующее устойчивое положение ротора.

