Изобретение относится к машиностроению и может быть использовано в бортовых системах контроля, защиты и управления грузоподъемных кранов, автогидроподъемников, экскаваторов, погрузчиков и других машин.
Известно периферийное устройство системы электрооборудования грузоподъемного крана, выполненное в виде информационно-измерительного модуля его системы контроля, защиты и управления, содержащего первичный преобразователь рабочего параметра крана, преобразователь его выходного сигнала в цифровой код, микроконтроллер, приспособленный для преобразования результата измерения рабочего параметра в последовательный код и его передачи по общей однопроводной мультиплексной линии связи с добавлением адреса этого модуля [1].
В этом устройстве осуществляется независимое измерение или контроль одного из рабочих параметра крана, характеризующих его нагрузку, геометрию, условия или режимы работы, независимое преобразование величины этого параметра в цифровые сигналы и, соответственно, независимый обмен информацией между периферийным устройством и информационно-управляющим блоком системы электрооборудования грузоподъемного крана.
Это приводит к необходимости применения в системе электрооборудования большого количества информационно-измерительных модулей и, соответственно, к существенному усложнению системы электрооборудования (системы безопасности) и снижению ее надежности.
Известно также периферийное устройство системы электрооборудования (системы безопасности), грузоподъемного крана, выполненное в виде информационно-измерительного модуля, содержащего два или более первичных преобразователей измеряемых или контролируемых рабочих параметров грузоподъемного крана, многоканальный преобразователь выходных сигналов этих преобразователей, микроконтроллер и трансивер для сопряжения микроконтроллера с мультиплексной линией связи этого модуля с информационно-управляющим блоком системы безопасности грузоподъемного крана. В этом периферийном устройстве микроконтроллер обеспечивает совместный прием, совместную обработку и совместную передачу последовательных цифровых сигналов по мультиплексной линии связи между этим периферийным устройством и информационно-управляющим блоком системы безопасности грузоподъемного крана с использованием одного идентификатора или адреса этого периферийного устройства, а в информационно-управляющем блоке проводится обработка сигналов по прикладной программе с выдачей управляющих сигналов на исполнительные механизмы грузоподъемного крана [2].
Такое исполнение периферийного устройства позволяет упростить систему электрооборудования грузоподъемного крана (машины) за счет сокращения количества периферийных устройств, но увеличивает нагрузку на мультиплексную линию связи, так как в одном периферийном устройстве разные рабочие параметры машины запрашиваются с равными периодами. Кроме того, реализация совместного приема, совместной обработки и совместной передачи последовательных цифровых сигналов по мультиплексной линии связи с использованием одного идентификатора или адреса периферийного устройства не всегда целесообразна в связи с тем, что параметры, которые используются при формировании, например, функции безопасности машины в динамичных режимах ее работы, должны запрашиваться контроллером или информационно-управляющим блоком значительно чаще, чем технологические параметры, например, такие как температура двигателя. Реже запрашиваются и параметры, медленно меняющиеся во времени, например длина стрелы крана по сравнению с углом ее наклона. Это приводит к увеличению загрузки мультиплексной линии связи, к снижению скорости обмена информацией в системе и, соответственно, к снижению быстродействия реализации системой функций контроля, защиты и управления машиной.
Наиболее близким к заявляемому изобретению по совокупности существенных признаков является периферийное устройство, содержащее первичные преобразователи измеряемых и/или контролируемых рабочих параметров машины, преобразователь их выходных сигналов в цифровой код, микроконтроллер и трансивер для сопряжения микроконтроллера с мультиплексной линией связи периферийного устройства с информационно-управляющим блоком или контроллером системы электрооборудования. Микроконтроллер приспособлен для преобразования измеряемых и/или контролируемых параметров в последовательный код, а также для приема/передачи последовательных цифровых сигналов по мультиплексной линии связи с индивидуально задаваемыми периодами опроса по линии связи и индивидуальными идентификаторами или адресами для каждого измеряемого и/или контролируемого рабочего параметра машины [3].
В этом устройстве использование индивидуально задаваемых периодов опроса и индивидуальных идентификаторов или адресов для каждого измеряемого или контролируемого рабочего параметра машины позволяет снизить нагрузку на линию связи лишь в том случае, если периоды опроса каждого рабочего параметра машины по линии связи существенно отличаются. В противном случае отказ об общего периода и общего идентификатора или адреса для группы рабочих параметров приводит не уменьшению, а к увеличению нагрузки на линию связи. Это обусловлено тем, что при реализации последовательного интерфейса каждый блок передаваемых данных содержит не только данные о рабочем параметре машины, но и вспомогательные данные - биты идентификации, управления, контрольной суммы, подтверждения приема и т.д. Поэтому если ведущее устройство в системе электрооборудования машины (ее контроллер или информационно-управляющий блок) поочередно обращается к периферийному устройству за получением данных о нескольких рабочих параметрах машины, то эти вспомогательные данные передаются/принимаются неоднократно. Поэтому, несмотря на сокращение каждого блока передаваемых данных, увеличение количества этих блоков, как правило, приводит к увеличению нагрузки на линию связи.
Кроме того, в известном периферийном устройстве не учитывается, что при обращении к нему ведущего устройства с запросом данных о каком-либо рабочем параметре машины, эти данные в момент запроса могут отсутствовать. Это обусловлено тем, что для их получения необходимо осуществить преобразование выходных сигналов первичного преобразователя рабочего параметра машины в цифровой код с помощью аналого-цифрового преобразователя (АЦП). Причем, как правило, это преобразование осуществляется многократно с целью фильтрации помех путем усреднения полученных цифровых данных, что увеличивает время подготовки данных для передачи по линии связи пропорционально количеству циклов и времени преобразования АЦП. Это приводит к задержкам в передаче данных по линии связи и, соответственно, к снижению скорости передачи данных по ней.
Задачами, на решение которых направлено предложенное техническое решение во всех вариантах его исполнения, являются:
- снижение информационной нагрузки на линию связи за счет реализации динамического изменения структуры информационных сообщений в линии, включая использование общих или индивидуальных периодов передачи и используемых идентификаторов или адресов, в зависимости от различных дополнительных условий, характеризующих работу машины;
- увеличение количества абонентов в линии связи при установленной скорости передачи данных за счет сокращения времени переключения с приема на передачу, а также обеспечения обмена информацией необходимого объема в системе электрооборудования машины с меньшей информационной нагрузкой на линию;
- снижение энергопотребления периферийного устройства;
- повышение надежности передачи данных по мультиплексной линии связи от периферийного устройства другим устройствам электрооборудования машины за счет реализации динамического изменения структуры информационных сообщений в линии, включая повторение передачи сообщений с минимальной дополнительной нагрузкой на линию связи в случае наличия сбоев при приеме/передаче;
- повышение помехоустойчивости и точности измерения рабочих параметров машины за счет реализации многократного преобразования выходных сигналов первичных преобразователей рабочих параметров машины с последующей цифровой обработкой полученных цифровых сигналов.
В первом варианте периферийного устройства, содержащего первичные преобразователи измеряемых и/или контролируемых рабочих параметров машины, многоканальный преобразователь или набор преобразователей выходных сигналов первичных преобразователей в цифровые сигналы, микроконтроллер, приспособленный для периодического преобразования цифровых сигналов в последовательные цифровые сигналы и их передачи по однопроводной, двухпроводной или беспроводной линии связи, а также для приема последовательных цифровых сигналов по этой линии связи между периферийным устройством и контроллером или информационно-управляющим блоком системы электрооборудования машины, и трансивер или драйвер для сопряжения микроконтроллера с указанной линией связи, указанные технические результаты достигаются за счет того, что микроконтроллер осуществляет передачу последовательных цифровых сигналов с индивидуально задаваемыми периодами этой передачи для каждого рабочего параметра машины или с общим периодом этой передачи для двух или более рабочих параметров машины, а также с использованием индивидуального идентификатора или адреса каждого рабочего параметра машины или общего идентификатора или адреса, по меньшей мере, двух рабочих параметров машины, в зависимости от различных дополнительных условий.
Микроконтроллер реализует общий период или индивидуальные периоды передачи информации по линии связи, а также передачу с общим идентификатором или адресом всех рабочих параметров или с индивидуальными идентификаторами или адресами каждого рабочего параметра при этой передаче, в зависимости от данных, предварительно записанных в памяти микроконтроллера, от величины или скорости изменения, по меньшей мере, одного рабочего параметра машины или от данных, принятых микроконтроллером по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины.
В этом варианте периферийного устройства микроконтроллер выполнен, в частности, с возможностью:
- определения величин и/или скоростей изменения рабочих параметров машины, их сравнения с предварительно установленными значениями, записанными в памяти микроконтроллера, а также последующей передачи по линии связи последовательных цифровых сигналов, содержащих информацию об этих рабочих параметрах машины, с общим периодом и с использованием одного идентификатора или адреса, если величины и/или скорости изменения этих рабочих параметров машины превышают предварительно установленные значения;
- измерения периодов запросов на получение информации о величинах различных рабочих параметров машины, принятых по линии связи, и последующего автоматического перехода на использование при передаче по линии связи сигналов, содержащих информацию об этих рабочих параметрах машины, общего периода передачи и одного идентификатора или адреса, если указанные периоды запросов не превышают заранее установленной величины;
- выявления изменения, по меньшей мере, одного рабочего параметра машины на предварительно установленную величину, а также, в случае приема с линии связи сигнала запроса на получение информации о величине другого рабочего параметра машины, передачи по линии связи этих двух параметров с использованием одного идентификатора или адреса;
- формирования идентификатора или адреса информации, передаваемой по линии связи, не совпадающего с принятым адресом или идентификатором запроса, если при передаче по линии связи одновременно со значениями запрошенного рабочего параметра микроконтроллер осуществляет передачу иного рабочего параметра машины.
Во втором варианте периферийного устройства системы электрооборудования машины, предназначенной для реализации функций ее контроля, и/или защиты, и/или управления, содержащем, по меньшей мере, один первичный преобразователь измеряемого и/или контролируемого рабочего параметра машины, преобразователь его выходных сигналов в цифровые сигналы, микроконтроллер, приспособленный для периодического преобразования цифровых сигналов в последовательные цифровые сигналы и их передачи по однопроводной, двухпроводной или беспроводной линии связи, а также для приема последовательных цифровых сигналов по этой линии связи между периферийным устройством и контроллером или информационно-управляющим блоком системы электрооборудования машины, и трансивер или драйвер для сопряжения микроконтроллера с указанной линией связи, эти технические результаты достигаются тем, что преобразователь выходных сигналов первичного преобразователя в цифровые сигналы встроен в микроконтроллер или микроконтроллер приспособлен для управления этим преобразователем, причем микроконтроллер дополнительно реализует различные периоды преобразования выходных сигналов первичного преобразователя в цифровые сигналы и периоды передачи информации о величине измеряемого и/или контролируемого им параметра по линии связи.
При этом, в частности, микроконтроллер периферийного устройства выполнен с возможностью:
- приема значений указанных периодов по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины, их записи в запоминающее устройство и использования в своей работе;
- измерения величины и/или скорости изменения рабочего параметра машины и последующей установки указанных периодов в зависимости от этой величины и/или скорости, в том числе увеличения периода передачи информации о величине измеряемого и/или контролируемого параметра по линии связи при выявлении снижения скорости его изменения;
- увеличения периода преобразования выходных сигналов первичного преобразователя в цифровые сигналы или прекращения этого преобразования в случае отсутствия в линии связи сигналов запроса на передачу значений этого рабочего параметра;
- увеличения периода преобразования или прекращения преобразования выходных сигналов первичного преобразователя после истечения предварительно заданного интервала времени или после выполнения заданного количества циклов или периодов преобразования в соответствии с их заданными величинами, предварительно записанными в памяти микроконтроллера или принятыми по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины, причем отсчет указанного интервала времени или заданного количества циклов или периодов преобразования может осуществляться с момента получения по линии связи сигнала запроса на передачу этого рабочего параметра;
- уменьшения периода преобразования выходных сигналов первичного преобразователя рабочего параметра машины в цифровой сигнал в случае приема по линии связи сигнала запроса на передачу в контроллер или в информационно-управляющий блок системы как данного, так и другого параметра работы машины;
- синхронизации начала периода передачи информации о значении рабочего параметра машины с завершением заданного количества циклов или периодов преобразования.
Кроме того, с целью достижения указанных технических результатов, в любом варианте предложенного периферийного устройства:
- преобразователь выходных сигналов первичного преобразователя или какой-либо канал этого преобразователя может содержать фильтр нижних частот или усилитель с плавно регулируемым или переключаемым коэффициентом усиления и/или с регулируемым смещением выходного сигнала, управление которым осуществляется микроконтроллером из условия компенсации смещения нулевого уровня выходного сигнала усилителя, установки нулевого значения выходного цифрового сигнала преобразователя или установки необходимых пределов измерения и/или контроля рабочего параметра машины;
- микроконтроллер может быть выполнен с возможностью определения и передачи по линии связи дополнительного параметра, характеризующего состояние какого-либо параметра работы машины или совместную характеристику двух или более параметров работы машины, для чего микроконтроллер может быть снабжен блоком памяти, в котором записана функциональная зависимость этого дополнительного сигнала от величин и/или скоростей изменения одного или более параметров работы машины;
- периферийное устройство может дополнительно содержать выходное устройство, приспособленное для подключения к нему нагрузки электрооборудования машины, вход управления которого соединен с дополнительным выходом микроконтроллера, осуществляющего прием сигнала управления этой нагрузкой по линии связи;
- микроконтроллер может быть выполнен с возможностью присвоения и передачи по линии связи индивидуального идентификатора или адреса периферийного устройства, и/или каждого измеряемого, и/или контролируемого параметра работы машины, и/или группы этих параметров.
Сущность предложенного технического решения заключается в использовании общего или индивидуальных периодов передачи информации по линии связи и общего или индивидуальных идентификаторов или адресов каждого рабочего параметра при этой передаче в зависимости от различных дополнительных условий, характеризующих работу машины, а также в реализации различных периодов преобразования выходных сигналов первичных преобразователей в цифровые сигналы и периодов передачи информации о величинах измеряемых или контролируемых ими параметров работы машины по линии связи.
С учетом особенностей работы машины, в том числе в зависимости от величин и скоростей изменения ее рабочих параметров, осуществляется динамическое изменение структуры информационных сообщений в линии связи, а также изменение порядка и параметров взаимодействия управляющего микроконтроллера периферийного устройства с первичными преобразователями рабочих параметров машины и с АЦП. При получении периферийным устройством запросов на передачу информации о значениях одних рабочих параметров может осуществляется передача по линии связи информации о величинах как запрошенных, так и других параметров работы машины.
Более подробно техническая сущность предложенного технического решения изложена при описании его работы.
Его отличительные признаки, обеспечивающие достижение указанных технических результатов, не известны из уровня техники.
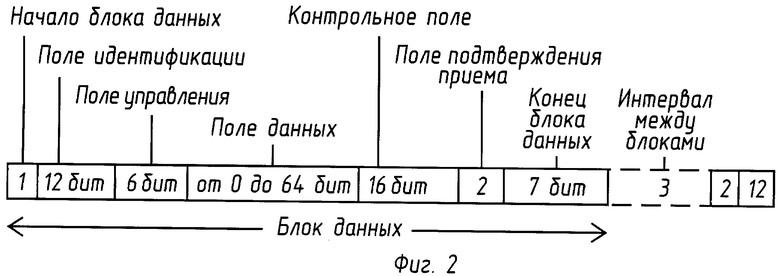
На фиг.1 показан пример исполнения предлагаемого периферийного устройства системы электрооборудования машины. На фиг.2 приведена конфигурация комплексного сигнала в мультиплексной линии связи CAN.
Периферийное устройство содержит первичные преобразователи 1 датчиков рабочих параметров машины, преобразователи 2 их выходных сигналов в цифровые сигналы, а также микроконтроллер 3 и трансивер или драйвер 4 для сопряжения микроконтроллера 3 с линией связи 5, по которой осуществляется обмен данными периферийного устройства с контроллером или информационно-управляющим блоком системы электрооборудования машины и, при необходимости, с другими периферийными устройствами.
Устройство может дополнительно содержать, по меньшей мере, одно выходное устройство 6, выполненное в виде усилителей мощности, силовых ключей, электромагнитных реле с соответствующими драйверами и т.п. и соединенное с нагрузками электрооборудования машины (с электромагнитами тормозов и электрогидравлических распределителей, с пусковыми устройствами электроприводов, с исполнительными устройствами системы предпускового подогрева и запуска двигателя, с приборами освещения, с сигнальными приборами и т.д.).
Периферийное устройство может именоваться «датчиком», «устройством сбора информации», «периферийным контроллером» и т.д. и может входить в состав какого-либо блока системы электрооборудования машины.
Управление периферийным устройством осуществляется по линии связи 5 от центрального блока системы электрооборудования - от контроллера или информационно-управляющего блока, которое может именоваться «блоком управления», «пультом оператора», «блоком отображения информации» и т.д. В частном случае, особенно при использовании линии связи типа CAN, система электрооборудования может быть реализована без центрального блока. В этом случае под контроллером или информационно-управляющим устройством подразумевается любое устройство, с которым предложенное периферийное устройство обменивается информацией.
Первичные преобразователи 1 являются чувствительными элементами датчиков параметров работы машины. Они, как правило, включают в себя датчики, характеризующие нагрузку и пространственное положение машины и ее оборудования. Например, система электрооборудования грузоподъемного крана, реализующая функции его контроля, защиты и управления, содержит датчики длины и угла наклона стрелы, датчик нагрузки крана, определяющий вес груза на грузозахватном органе (датчик усилия в стреловом или грузовом канате или датчики давления в гидроцилиндре подъема стрелы), датчик высоты подъема грузозахватного органа, датчик угла поворота крана (датчик азимута) и т.д.
Первичные преобразователи 1 могут осуществлять измерение или контроль внешних условий работы машины, в том числе скорости и направления ветра, продольного и поперечного углов наклона рабочей площадки, температуры окружающей среды, освещенности места производства работ и т.д., а также параметров технического состояния машины - температуры и давления смазки ее отдельных механизмов и приводов, температуры охлаждающей жидкости двигателя, температуры и давления рабочей жидкости в гидросистеме, электрического напряжения или тока в силовой цепи и т.д.
В первичных преобразователях 1 могут быть использованы тензометрические, магнитно-электрические, оптические, емкостные и иные методы преобразования рабочих параметров машины в электрические сигналы. На их выходах или на входах преобразователей 2 могут быть установлены активные, LC или RC фильтры нижних частот, обеспечивающие подавление помех. Либо их подавление (фильтрация) осуществляется микроконтроллером 3 с использованием методов цифровой фильтрации.
Преобразователи 2 выходных сигналов первичных преобразователей 1 в цифровые сигналы реализованы, как правило, на основе многоканальных аналого-цифровых преобразователей (АЦП). Кроме реализации их основной функции, они могут формировать выходные токи или напряжения питания первичных преобразователей 1, например тензометрических мостов, либо осуществлять управление этими токами или напряжениями.
АЦП содержат, в общем случае, встроенные или внешние усилители, в том числе с переменными или переключаемыми коэффициентами усиления, и цепи, которые могут быть приспособлены для сдвига уровня выходного сигнала, в частности, с целью компенсации напряжения смещения нуля первичного преобразователя 1. Для этого могут быть использованы АЦП с дифференциальными входами.
Преобразователи сигналов (АЦП) 2 работают под управлением микроконтроллера 3 либо входят в его состав, что автоматически означает их управление от этого микроконтроллера.
Микроконтроллер 3 имеет встроенный последовательный интерфейс и приспособлен для обработки цифровых значений параметров работы машины, их преобразования в последовательный код, а также приема/передачи последовательных цифровых сигналов по линии связи 5.
Обмен данными, в зависимости от исполнения трансивера или драйвера 4, может быть реализован по проводному LIN (Local Interconnect Network), J1 850 (SAE), CAN (Controller Area Network), CarLink, VAN, A-bus, RS-232C, «токовая петля», MIDI, MicroLAN или беспроводному Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д. протоколу (спецификации, стандарту).
При работе машины периферийное устройство с помощью первичных преобразователей 1 осуществляют измерение (контроль) рабочих параметров машины. Например, нагрузки грузоподъемного крана и положения его грузоподъемного (стрелового) оборудования. Измерение осуществляется с некоторым периодом Т, который задается программно микроконтроллером 3. Результаты измерений, преобразованные в цифровую форму преобразователями сигналов (АЦП) 2, обрабатываются микроконтроллером 3, в частности с использованием алгоритмов цифровой фильтрации, и сохраняются в памяти микроконтроллера 3.
Одновременно с управлением измерительной частью периферийного устройства микроконтроллер 3, с использованием встроенного блока последовательного интерфейса, формирует цифровой сигнал для его последующей передачи в точку приема - в центральный контроллер или в информационно-управляющий блок, либо в другое периферийное устройство системы электрооборудования машины. Передаваемый сигнал от микроконтроллера через трансивер или драйвер 4 поступает на линию связи 5.
При использовании, например, стандартного формата протокола шины CAN пакет данных для передачи сообщений по линии связи (шине) 5 состоит из 8-ми последовательных полей (фиг.2):
1. Начало блока данных: маркирует начало сообщения (стартовый бит) и синхронизирует все устройства, подключенные к линии.
2. Поле идентификации: состоит из идентификатора (идентификатор адреса в 11 бит, 1 контрольного бита запроса Remote Transmission Request-Bit). Этот контрольный бит маркирует пакет как Data Frame (блок данных сообщения) или как Remote Frame (блок данных запроса) без собственно сообщения.
3. Поле управления: (6 бит) содержит IDE (управляющие биты), бит для распознавания стандартного и расширенного формата (Identifier Extension Bit), резервный бит для последующих расширений и, в последних 4 битах, - количество байтов данных, заложенных в поле данных.
4. Поле данных: может содержать от 0 до 8 байт (от 0 до 64 бит) данных. Сообщение по шине данных CAN длиной 0 байт используется для синхронизации распределенных процессов.
5. Контрольное поле: CRC (Cyclic-Redundancy-Check Field) содержит 16 бит и служит для контрольного распознавания ошибок при передаче.
6. Поле подтверждения приема: (2 бита) поле АСК (Acknowledgement Field) содержит сигнал подтверждения от блоков-приемников о получении безошибочных сообщений по шине данных CAN.
7. Конец блока данных: (7 бит) маркирует конец пакета данных.
8. Интервал между блоками данных: (не менее 3 бит) разделяет блоки данных во времени.
После этого любое устройство, подключенное к линии связи (шине) 5, может передавать по ней следующий пакет данных.
Предположим, что периферийное устройство использует общий идентификатор (период передачи) для двух параметров работы машины и информация о каждом из них содержится в 2-х байтах. В этом случае сумма битов блока данных и интервала между блоками составит 79 бит (фиг.2).
Если же для передачи информации о значениях двух рабочих параметров используются различные идентификатора, то потребуется последовательно передать два блока данных, содержащих (с интервалами между блоками) в сумме 63×2=126 бит.
Из этого следует, что при равных требованиях к временным задержкам на передачу различных параметров работы машины использование общего идентификатора является более предпочтительным.
Если же в системе электрооборудования машины требования к быстродействию опроса датчиков различных параметров машины различны, то в отдельных случаях целесообразно осуществлять передачу данных о различных рабочих параметрах машины с различными периодами.
Если, например, за какой-либо период времени значение одного параметра работы машины необходимо передать 100 раз, а другого параметра один раз, то, в случае использования общего идентификатора и передачи по линии одновременно значений этих двух параметров, за этот период времени в общей сложности будет передано 79×100=7900 бит. При этом 99 из 100 переданных значений второго параметра не будут использованы.
При использовании различных идентификаторов и отдельной передачи по линии каждого параметра в общей сложности по линии будет передано 63×101=6363 бит. Соответственно, в данном частном примере периферийное устройство по RU 90057 U1, принятое за прототип, действительно более эффективно, чем по RU 2268232 C2.
Однако в процессе передачи информационных сообщений по линии, в соответствии с предложенным техническим решением, можно изменять их структуру. В приведенном примере можно, например, по линии 99 раз передать значение первого параметра работы машины с индивидуальным идентификатором, а затем один раз - значения двух рабочих параметров с общим идентификатором (адресом). В этом случае в указанном интервале времени по линии будет передано (63×99)+79=6316 бит, т.е. можно передать меньшее количество бит.
Этот пример показывает преимущество предложенного технического решения по сравнению с известными.
Для осуществления перехода от общего периода передачи по линии связи 5 и общего идентификатора (адреса) для различных рабочих параметров машины к индивидуальным периодам и идентификаторам, а также для обратного перехода микроконтроллер 3 использует различные дополнительные условия и алгоритмы, записанные в виде программы работы микроконтроллера в его энергонезависимой памяти. Эти алгоритмы и программы разрабатываются при проектировании системы электрооборудования машины исходя из требований к функциям контроля, защиты и управления, реализуемым этой системой. Из этих требования вытекают, в частности, требования к периодам (быстродействию) опроса выходных сигналов первичных преобразователей 1 параметров работы машины, условия, при которых эта передача необходима в ускоренном режиме, и т.д.
В частности, как правило, передачу по линии связи значений тех рабочих параметров машины, которые наиболее интенсивно изменяются в текущем режиме работы машины или имеют критически важное значение для ее безопасности (к ним относится, например, нагрузка грузоподъемной машины), необходимо осуществлять с небольшими задержками времени (с малым периодом передачи). В то же время медленно изменяющиеся параметры, например длина стрелы и температура двигателя, могут передаваться через достаточно большие промежутки времени (с большими периодами).
В большинстве случаев нет также необходимости в передаче по линии связи информации о тех параметрах, которые с момента последней передачи не изменили своих величин.
Для реализации этих алгоритмов микроконтроллер 3, в частности, определяет величины и скорости изменения рабочих параметров машины, значения которых получены от преобразователей сигналов 2, осуществляет их обработку (нормализацию, фильтрацию, термокомпенсацию, линеаризацию и т.д.) и сравнивает их с предварительно установленными значениями, записанными в памяти микроконтроллера 3. Далее микроконтроллер реализует передачу по линии связи 5 информации об этих рабочих параметрах машины с общим периодом и с использованием одного идентификатора (адреса), если величины и/или скорости изменения этих рабочих параметров машины превышают предварительно установленные значения. В противном случае микроконтроллер 3 определяет целесообразность использования индивидуальных периодов и идентификаторов либо наиболее оптимальную комбинацию общих и индивидуальных периодов и идентификаторов для различных параметров работы машины.
Если периферийное устройство работает в режиме ответов на запросы, поступающие по линии связи 5 от центрального контроллера или информационно-управляющего устройства системы электрооборудования машины, то микроконтроллер 3 может осуществлять измерения периодов принятых по линии связи запросов на получение информации о величинах различных рабочих параметров машины.
Далее микроконтроллер 3, на основании полученных значений этих периодов и конфигурации комплексного сигнала в мультиплексной линии связи 5 (фиг.2) целесообразно самостоятельно использует общий или индивидуальный периоды и идентификаторы либо их комбинации для передачи каждого параметра работы машины. Этот переход к изменению порядка и параметров передачи сигналов по линии 5 микроконтроллером 3 может осуществляться автоматически либо после получения сигнала разрешения от какого-либо другого устройства системы электрооборудования, подключенного к линии.
При выявлении изменения какого-либо параметра работы машины на предварительно установленную величину микроконтроллер 3 может включить информацию об этом параметре в поле данных какого-либо сообщения, посылаемого по запросу на получение информации о величине другого рабочего параметра машины. При этом передача по линии дополнительного параметра, отсутствующего в запросе, сопровождается соответствующим изменением идентификатора или адреса.
С целью исключения пауз между блоками данных, передаваемых по линии связи 5, преобразователи сигналов (АЦП) 2 работают под управлением микроконтроллера 3 таким образом, чтобы к моменту начала передачи данных о значениях рабочих параметров машины эти данные были подготовлены для передачи.
Постоянная работа преобразователей сигналов (АЦП) 2 с минимально возможным периодом, ограниченным лишь временем этого преобразования, как правило, невозможна, поскольку такой режим работы приводит к повышенному энергопотреблению периферийного устройства (из-за повышенного потребления преобразователей 2 в динамических режимах их работы, необходимости непрерывного поддержания напряжения питания первичных преобразователей 1 и т.д.), а также к повышенной информационной загрузке микроконтроллера 3.
Поэтому для обеспечения своевременной подготовки данных для передачи по линии связи 5 запуск преобразователей сигналов (АЦП) 2 осуществляется микроконтроллером 3 в моменты времени и с периодами, в общем случае не совпадающими с моментами времени и периодами приема микроконтроллером сигналов запроса на передачу и самой передачи информации о величинах преобразуемых ими параметров по линии связи 5.
Информация о необходимых значениях периодов запуска преобразователей сигналов (АЦП) 2 для каждого первичного преобразователя 1, в частности, может быть получена периферийным устройством от другого устройства системы электрооборудования по линии связи 5. Возможна также установка этих периодов микроконтроллером 3 в зависимости от величины или скорости изменения какого-либо рабочего параметра машины.
Если периферийное устройство работает в режиме ответов на запросы, поступающие по линии связи 5, то в случае отсутствия в линии связи сигналов запроса на передачу значений какого-либо рабочего параметра микроконтроллер 3 реализует увеличение периода преобразования выходных сигналов соответствующего первичного преобразователя 1 в цифровые сигналы либо прекращение этого преобразования.
Указанное увеличения периода преобразования или прекращение преобразования может осуществляться микроконтроллером 3 после истечения предварительно заданного интервала времени или после выполнения заданного количества циклов или периодов преобразования в соответствии с их заданными величинами, предварительно записанными в памяти микроконтроллера или принятыми по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины. Причем отсчет указанного интервала времени, заданного количества циклов или периодов преобразования, может осуществляться с момента получения по линии связи последнего сигнала запроса на передачу этого рабочего параметра.
Если по линии связи 5 в периферийное устройство пришел запрос на передачу какого-либо параметра, то имеются основания предполагать, что система электрооборудования находится в активном состоянии и следует ожидать запроса на передачу информации о величине другого рабочего параметра машины. В этом случае микроконтроллер 5 может до поступления запроса на передачу другого рабочего параметра в превентивном порядке осуществить уменьшение периода преобразования выходного сигнала его первичного преобразователя 1.
Если обмен информацией по линии связи 5 осуществляется с неизменными периодами, то микроконтроллер 3, если это предусмотрено в программе его работы, осуществляет синхронизацию моментов, периодов запуска или заданного количества циклов работы преобразователей сигналов 2 с сигналами в линии связи 5. Это обеспечивает постоянную готовность данных о параметрах работы машины к передаче по линии с минимальными затратами энергии и ресурсов микроконтроллера на подготовку этих данных.
В состав преобразователя выходных сигналов 2 первичных преобразователей 1 или микроконтроллера 5 могут быть включены усилители с регулируемыми (переключаемыми) коэффициентами усиления и с регулируемым смещением их выходных сигналов. В этом случае микроконтроллер 3 осуществляет контроль граничных значений (диапазона изменения) выходных сигналов соответствующих преобразователей 2, сравнивает их с заданными величинами и осуществляет соответствующее управление усилителями, обеспечивая установку нулевого значения выходного цифрового сигнала преобразователя 2 или необходимых пределов измерения или контроля каждого рабочего параметра машины.
Микроконтроллер 3 может также определять и передавать по линии связи 5 значения дополнительного параметра, характеризующего состояние какого-либо параметра работы машины или совместную характеристику двух или более параметров работы машины. Например, если периферийное устройство стрелового грузоподъемного крана содержит первичные преобразователи 1 датчиков длины и угла наклона стрелы, то микроконтроллер 3 может вычислить и передать по линии 5 значение вылета грузозахватного органа. Эти вычисления осуществляются с использованием функциональных зависимостей между дополнительным и рабочими параметрами машины, предварительно записанных в память микроконтроллера 3.
В случае оснащения периферийного устройства выходным устройством 6, подключенным к каким-либо нагрузкам электрооборудования машины, управление этими нагрузками может осуществляться непосредственно от периферийного устройства. Например, периферийное устройство, размещенное на оголовке стрелы грузоподъемного крана, может осуществлять управление габаритным фонарем и фарой рабочего освещения, расположенными в непосредственной близости от этого периферийного устройства.
Сигналы управления такими нагрузками могут приниматься микроконтроллером 3 по линии связи 5 либо формироваться им самостоятельно.
В данном описании приведены лишь частные примеры реализации периферийного устройства системы электрооборудования машины. Изобретение охватывает другие возможные варианты его исполнения и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
Источники информации
1. RU 2232709 C2, B66C 13/18, B66C 23/88, 20.07.2004.
2. RU 2268232 С2, В66С 13/18, В66С 23/88, 20.01.2006.
3. RU 90057 U1, В66С 15/00, В66С 23/88, 27.12.2009.
Изобретение относится к машиностроению и может быть использовано в бортовых системах контроля, защиты и управления грузоподъемных кранов и других машин. В первом варианте исполнения периферийное устройство содержит первичные преобразователи рабочих параметров машины, многоканальный преобразователь выходных сигналов первичных преобразователей в цифровые сигналы, микроконтроллер, трансивер или драйвер. Микроконтроллер передает последовательные цифровые сигналы с использованием индивидуальных периодов или адресов рабочих параметров, в зависимости от данных, записанных в памяти микроконтроллера или принятых микроконтроллером, или от величины изменения рабочих параметров. Во втором варианте исполнения периферийное устройство содержит первичные преобразователи рабочих параметров, преобразователь выходных сигналов первичных преобразователей, микроконтроллер, трансивер или драйвер. Преобразователем выходных сигналов управляет микроконтроллер, который реализует различные периоды преобразования сигналов первичных преобразователей в цифровые и периодов передачи информации о величине измеряемого им рабочих параметров по линии связи. Решение направлено на повышение надежности передачи данных. 2 н. и 22 з.п. ф-лы, 2 ил.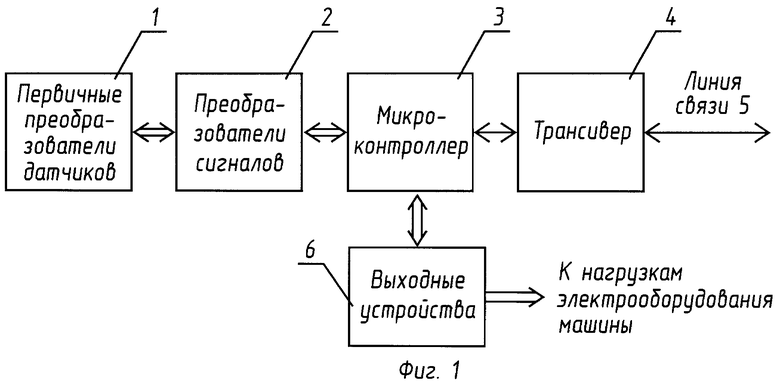
1. Периферийное устройство системы электрооборудования машины, предназначенной для реализации функций ее контроля, и/или защиты, и/или управления, содержащее первичные преобразователи измеряемых и/или контролируемых рабочих параметров машины, многоканальный преобразователь или набор преобразователей выходных сигналов первичных преобразователей в цифровые сигналы, микроконтроллер, приспособленный для периодического преобразования цифровых сигналов в последовательные цифровые сигналы и их передачи по однопроводной, или двухпроводной, или беспроводной линии связи, а также для приема последовательных цифровых сигналов по этой линии связи между периферийным устройством и контроллером или информационно-управляющим блоком системы электрооборудования машины, и трансивер или драйвер для сопряжения микроконтроллера с указанной линией связи, отличающееся тем, что микроконтроллер приспособлен для передачи последовательных цифровых сигналов с использованием общего и/или индивидуально задаваемых периодов этой передачи для каждого рабочего параметра машины, и/или с использованием общего и/или индивидуальных идентификаторов или адресов каждого рабочего параметра машины в зависимости от данных, предварительно записанных в памяти микроконтроллера, или от величины или скорости изменения, по меньшей мере, одного рабочего параметра машины, или от данных, принятых микроконтроллером по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины.
2. Периферийное устройство по п.1, отличающееся тем, что микроконтроллер выполнен с возможностью определения величин и/или скоростей изменения рабочих параметров машины, их сравнения с предварительно установленными значениями, записанными в памяти микроконтроллера, а также последующей передачи по линии связи последовательных цифровых сигналов, содержащих информацию об этих рабочих параметрах машины, с общим периодом и с использованием одного идентификатора или адреса, если величины и/или скорости изменения этих рабочих параметров машины превышают предварительно установленные значения.
3. Периферийное устройство по п.1, отличающееся тем, что микроконтроллер выполнен с возможностью измерения периодов запросов на получение информации о величинах различных рабочих параметров машины, принятых по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины, а также с возможностью автоматического перехода к использованию при передаче по линии связи сигналов, содержащих информацию об этих рабочих параметрах машины, общего периода передачи и одного идентификатора или адреса, если указанные периоды запросов не превышают заранее установленной величины.
4. Периферийное устройство по п.1, отличающееся тем, что микроконтроллер выполнен с возможностью выявления изменений, по меньшей мере, одного рабочего параметра машины на предварительно установленную величину и, в случае приема с линии связи сигнала запроса на получение информации о величине другого рабочего параметра машины, с возможностью передачи по линии связи этих двух параметров с использованием одного идентификатора или адреса.
5. Периферийное устройство по любому из пп.1-4, отличающееся тем, что микроконтроллер выполнен с возможностью формирования идентификатора или адреса информации, передаваемой по линии связи, не совпадающего с принятым адресом или идентификатором запроса, если при передаче по линии связи одновременно со значениями запрошенного рабочего параметра микроконтроллер осуществляет передачу иного рабочего параметра машины.
6. Периферийное устройство по любому из пп.1-4, отличающееся тем, что, по меньшей мере, один преобразователь выходных сигналов первичного преобразователя или, по меньшей мере, один канал этого преобразователя содержит входной фильтр нижних частот и/или усилитель с плавно регулируемым или переключаемым коэффициентом усиления и/или с регулируемым смещением выходного сигнала, а микроконтроллер выполнен с возможностью формирования сигнала управления коэффициентом усиления этого усилителя и/или изменения уровня его выходного сигнала из условия компенсации смещения нулевого уровня выходного сигнала усилителя, или установки нулевого значения выходного цифрового сигнала преобразователя, или установки необходимых пределов измерения и/или контроля рабочего параметра машины.
7. Периферийное устройство по любому из пп.1-4, отличающееся тем, что микроконтроллер выполнен с возможностью определения и передачи по линии связи дополнительного сигнала или параметра, характеризующего состояние, по меньшей мере, одного параметра работы машины, или совместную характеристику двух или более параметров работы машины, для чего микроконтроллер снабжен блоком памяти, в котором записана функциональная зависимость этого дополнительного сигнала или параметра от величин и/или скоростей изменения одного или более параметров работы машины.
8. Периферийное устройство по любому из пп.1-4, отличающееся тем, что оно снабжено, по меньшей мере, одним выходным устройством, приспособленным для подключения к нему нагрузки электрооборудования машины, вход управления которого соединен с дополнительным выходом микроконтроллера, который приспособлен для приема сигнала управления этой нагрузкой с линии связи.
9. Периферийное устройство по любому из пп.1-4, отличающееся тем, что микроконтроллер выполнен с возможностью присвоения и передачи по линии связи индивидуального идентификатора или адреса этого периферийного устройства, и/или каждого измеряемого и/или контролируемого параметра работы машины, и/или группы этих параметров
10. Периферийное устройство по любому из пп.1-4, отличающееся тем, что микроконтроллер дополнительно выполнен с возможностью реализации различных периодов преобразования выходных сигналов первичного преобразователя в цифровые сигналы и периодов передачи информации о величине измеряемого и/или контролируемого им параметра по линии связи.
11. Периферийное устройство системы электрооборудования машины, предназначенной для реализации функций ее контроля, и/или защиты, и/или управления, содержащее, по меньшей мере, один первичный преобразователь измеряемого и/или контролируемого рабочего параметра машины, преобразователь выходных сигналов этого первичного преобразователя в цифровые сигналы, микроконтроллер, приспособленный для периодического преобразования цифровых сигналов в последовательные цифровые сигналы и их передачи по однопроводной, или двухпроводной, или беспроводной линии связи, а также для приема последовательных цифровых сигналов по этой линии связи между периферийным устройством и контроллером или информационно-управляющим блоком системы электрооборудования машины, и трансивер или драйвер для сопряжения микроконтроллера с указанной линией связи, отличающееся тем, что преобразователь выходных сигналов первичного преобразователя в цифровые сигналы встроен в микроконтроллер или микроконтроллер приспособлен для управления этим преобразователем, причем микроконтроллер приспособлен для реализации различных периодов преобразования выходных сигналов первичного преобразователя в цифровые сигналы и периодов передачи информации о величине измеряемого и/или контролируемого им параметра по линии связи.
12. Периферийное устройство по п.11, отличающееся тем, что микроконтроллер приспособлен для приема информации о значениях указанных периодов по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины, а также их записи в запоминающее устройство и использования в своей работе.
13. Периферийное устройство по п.11, отличающееся тем, что микроконтроллер выполнен с возможностью измерения величины и/или скорости изменения рабочего параметра машины и последующей установки указанных периодов в зависимости от этой величины и/или скорости.
14. Периферийное устройство по п.13, отличающееся тем, что микроконтроллер выполнен с возможностью увеличения периода передачи информации о величине измеряемого и/или контролируемого им параметра по линии связи при выявлении снижения скорости его изменения.
15. Периферийное устройство по п.11, отличающееся тем, что микроконтроллер выполнен с возможностью увеличения периода преобразования выходных сигналов первичного преобразователя в цифровые сигналы или прекращения этого преобразования в случае отсутствия в линии связи сигналов запроса на передачу значений этого рабочего параметра.
16. Периферийное устройство по п.15, отличающееся тем, что микроконтроллер выполнен с возможностью указанного увеличения периода преобразования или прекращения преобразования после истечения предварительно заданного интервала времени или после выполнения заданного количества циклов или периодов преобразования, причем эти заданные величины предварительно записаны в памяти микроконтроллера или микроконтроллер выполнен с возможностью их приема по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины.
17. Периферийное устройство по п.16, отличающееся тем, что микроконтроллер выполнен с возможностью отсчета указанного интервала времени или заданного количества циклов или периодов преобразования с момента получения по линии связи сигнала запроса на передачу этого рабочего параметра.
18. Периферийное устройство по п.11, отличающееся тем, что микроконтроллер выполнен с возможностью уменьшения периода преобразования выходного сигнала первичного преобразователя рабочего параметра машины в цифровой сигнал в случае приема по линии связи сигнала запроса на передачу в контроллер или в информационно-управляющий блок системы как данного, так и другого параметра работы машины.
19. Периферийное устройство по любому из пп.11-18, отличающееся тем, что микроконтроллер приспособлен для передачи последовательных цифровых сигналов в режимах с использованием общего или индивидуально задаваемых периодов этой передачи для каждого рабочего параметра машины, и/или в режимах с использованием общего или индивидуальных идентификаторов или адресов каждого рабочего параметра машины, а также с возможностью выбора, по меньшей мере, одного из указанных режимов передачи в зависимости от данных, предварительно записанных в памяти микроконтроллера, или от величины или скорости изменения, по меньшей мере, одного рабочего параметра машины, или от данных, принятых микроконтроллером по линии связи от контроллера или информационно-управляющего блока системы электрооборудования машины.
20. Периферийное устройство по любому из пп.11-18, отличающееся тем, что микроконтроллер выполнен с возможностью синхронизации начала передачи информации о значении рабочего параметра машины и окончания заданного количества циклов или периодов преобразования.
21. Периферийное устройство по любому из пп.11-18, отличающееся тем, что преобразователь выходных сигналов первичного преобразователя содержит входной фильтр нижних частот и/или усилитель с плавно регулируемым или переключаемым коэффициентом усиления и/или с регулируемым смещением выходного сигнала, а микроконтроллер выполнен с возможностью формирования сигнала управления коэффициентом усиления этого усилителя и/или изменения уровня его выходного сигнала из условия компенсации смещения нулевого уровня выходного сигнала усилителя, или установки нулевого значения выходного цифрового сигнала преобразователя, или установки необходимых пределов измерения и/или контроля рабочего параметра машины.
22. Периферийное устройство по любому из пп.11-18, отличающееся тем, что микроконтроллер выполнен с возможностью определения и передачи по линии связи дополнительного сигнала или параметра, характеризующего состояние, по меньшей мере, одного параметра работы машины, или совместную характеристику двух или более параметров работы машины, для чего микроконтроллер снабжен блоком памяти, в котором записана функциональная зависимость дополнительного сигнала или параметра от величин и/или скоростей изменения одного или более параметров работы машины.
23. Периферийное устройство по любому из пп.11-18, отличающееся тем, что оно снабжено, по меньшей мере, одним выходным устройством, приспособленным для подключения к нему нагрузки электрооборудования машины, вход управления которого соединен с дополнительным выходом микроконтроллера, который приспособлен для приема сигнала управления этой нагрузкой с линии связи.
24. Периферийное устройство по любому из пп.11-18, отличающееся тем, что микроконтроллер выполнен с возможностью присвоения и передачи по линии связи индивидуального идентификатора или адреса этого периферийного устройства, и/или каждого измеряемого и/или контролируемого параметра работы машины, и/или группы этих параметров.
| Приспособление для контроля шага резьбы ходовых винтов | 1950 |
|
SU90057A1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2268232C2 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232709C2 |
| Способ изготовления заменителя патоки в виде модифицированного крахмала при производстве карамельных изделий | 1949 |
|
SU91062A1 |
| Устройство для контроля диаметра изделия, обрабатываемого на станке, преимущественно токарном | 1959 |
|
SU129341A1 |
| JP 58125108 A, 26.07.1983. | |||

