Изобретение относится к области радиолокации и может быть использовано в радиолокационных комплексах для обзора контролируемого пространства.
Из существующего уровня техники известен способ многопозиционной радиолокации (патент РФ №2332684, МПК8 G01S 13/00, опубл. 24.01.2007), в котором, как и в предлагаемом способе, производятся объединение и совместная обработка сигналов и информации разнесенных позиций в пункте обработки информации для обнаружения целей, измерения их координат, определения параметров траекторий и последующего отождествления. Кроме того, в отличие от предлагаемого, в известном способе излучаются и принимаются высокочастотные сигналы линий электропередачи. Недостатком данного способа является отсутствие возможности управления параметрами разнесенных позиций радиолокационных станций, что не позволяет устанавливать оптимальные параметры радиолокационных станций, вследствие чего обнаружение целей ведется с малой эффективностью - малой вероятностью правильного обнаружения целей, а также малой точностью определения их координат.
Наиболее близким к заявленному техническому решению является способ радиолокации (патент РФ №2330306, МПК8 G01S 5/04, опубл. 15.12.2006), прототип, в котором, как и в предлагаемом, в каждом пункте приема осуществляют прием, обработку и измерение параметров сигнала, определяют направление и время поступления сигнала, передают всю полученную информацию в главную управляющую персональную электронно-вычислительную машину (ПЭВМ), где выполняют объединение данных, отождествление параметров цели, затем определяют координаты и траекторию цели. Кроме того, в отличие от предлагаемого, в известном способе производится управление системами вращения пунктов приема, что обеспечивает наведение антенн в одну точку, находящуюся на заданном расстоянии от условного центра - радиусе обзора, и перемещающуюся с заданной угловой скоростью - скоростью обзора. Недостатком прототипа является отсутствие управления расположением разнесенных позиций, что не позволяет распределять пункты приема радиолокационной информации (ППРЛИ) в зависимости от требуемых параметров зоны наблюдения, вследствие чего обнаружение целей ведется с малой вероятностью правильного обнаружения целей, а также малой точностью определения их координат.
ППРЛИ выполняет задачу обнаружения и сопровождения целей. При групповом использовании ППРЛИ возникает необходимость их оптимального взаимного расположения с целью повышения вероятности обнаружения целей, а также повышения точности определения их координат. В связи с этим возникает задача управления расположением разнесенных позиций ППРЛИ.
Предлагаемый способ имеет следующие существенные признаки, сходные с прототипом, в каждом ППРЛИ осуществляют прием, обработку и измерение параметров сигнала, определяют направление и время поступления сигнала, передают всю полученную информацию в главную управляющую ПЭВМ, где выполняют объединение данных, отождествление параметров цели, затем определяют координаты и траекторию цели.
Технический результат при осуществлении изобретения - повышение вероятности правильного обнаружения целей, а также повышение точности определения их координат, достигается тем, что в предлагаемом способе определяют текущие координаты разнесенных позиций ППРЛИ, затем вырабатывают целевые координаты ППРЛИ таким образом, чтобы обеспечить их оптимальное расположение с точки зрения распределения зон наблюдения ППРЛИ, составляют план перемещения и передают на разнесенные позиции ППРЛИ управляющие команды, после ППРЛИ изменяют свои позиции согласно принятым целевым координатам.
Благодаря определению текущих координат разнесенных позиций ППРЛИ, выработке целевых координат ППРЛИ, составлению плана перемещения, передаче на разнесенные позиции ППРЛИ управляющих команд, изменению ППРЛИ своих позиций согласно принятым целевым координатам реализуется возможность управления расположением ППРЛИ в зависимости от требуемых параметров зоны наблюдения. При этом N (где N≥1) блоков определения координат вырабатывают текущие координаты расположения N позиций ППРЛИ и передают их по N дополнительным каналам связи в центральный блок управления. Центральный блок управления по заданному алгоритму определяет оптимальные координаты N позиций ППРЛИ. Алгоритм может быть реализован в следующем виде:
осуществляется поиск оптимальных координат N ППРЛИ, при которых максимальна функция оценки эффективности наблюдения  , где Sпер(i,j) - площадь пересечения области видения ППРЛИj) и зоны наблюдения i, qi - требуемая вероятность обнаружения в зоне наблюдения i, Kj - паспортная вероятность обнаружения ППРЛИj. После этого центральный блок управления производит сравнение с текущими координатами N позиций ППРЛИ, определяет возможность смены позиций, составляет план перемещения и передает сигналы управления в Q (где 0≤Q≤N) периферийных блоков управления по Q дополнительным каналам связи. После чего Q ППРЛИ изменяют свои позиции расположения в соответствии с полученными сигналами управления путем свертывания позиций и развертывания их в позициях с необходимыми координатами.
, где Sпер(i,j) - площадь пересечения области видения ППРЛИj) и зоны наблюдения i, qi - требуемая вероятность обнаружения в зоне наблюдения i, Kj - паспортная вероятность обнаружения ППРЛИj. После этого центральный блок управления производит сравнение с текущими координатами N позиций ППРЛИ, определяет возможность смены позиций, составляет план перемещения и передает сигналы управления в Q (где 0≤Q≤N) периферийных блоков управления по Q дополнительным каналам связи. После чего Q ППРЛИ изменяют свои позиции расположения в соответствии с полученными сигналами управления путем свертывания позиций и развертывания их в позициях с необходимыми координатами.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволили установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Выбор из перечня выявленных аналогов и прототипа, как наиболее близкого по совокупности существенных признаков аналога, позволил выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном устройстве, изложенных в формуле изобретения. Следовательно, заявленное изобретение соответствует критерию"новизна".
Для проверки соответствия заявленного изобретение критерию "изобретательский уровень" заявитель провел дополнительный поиск известных решений, чтобы выявить признаки, совпадающие с отличительными от прототипа признаками заявленного устройства. Результаты поиска показали, что заявленное изобретение не вытекает для специалиста явным образом из известного уровня техники, определенного заявителем. Не выявлено влияние преобразований, предусматриваемых существенными признаками заявленного изобретения, на достижение технического результата. В частности, заявленным изобретением не предусматриваются следующие преобразования: дополнение известного средства какой-либо известной частью, присоединяемой к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно таких дополнений; замену какой-либо части известного средства другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такой замены; исключение какой-либо части средства с одновременным исключением обусловленной ее наличием функции и достижением при этом обычного для такого исключения результата; увеличение однотипных элементов для усиления технического результата, обусловленного наличием в средстве именно таких элементов; выполнение известного средства или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала; создание средства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, рекомендаций, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого объекта и связей между ними; изменение количественных признаков или взаимосвязи признаков, если известен факт влияния каждого из них на технический результат и новые значения признаков или их взаимосвязь могли быть получены из известных зависимостей. Следовательно, заявленное изобретение соответствует критерию "изобретательский уровень".
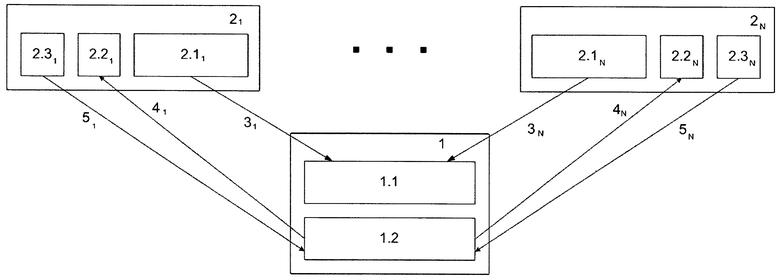
Изобретение поясняется фигурой, на которой представлена структурная схема радиолокационного комплекса, осуществляющего предложенный способ.
Предлагаемый способ может быть реализован радиолокационным комплексом, ближайшим аналогом которого является известное устройство радиолокации (патент РФ №2150716, МПК7 G01S 13/04, опубл. 23.11.1998), прототип. Предлагаемый радиолокационный комплекс, как и прототип, состоит из N (где N≥1) радиолокационных станций 2.11-2.1N, осуществляющих обнаружение и сопровождение целей, отличается тем, что дополнительно введены центральный пост наблюдения 1, состоящий из пункта обработки информации 1.1 и центрального блока управления 1.2, N периферийных блоков управления 2.21-2.2N и N блоков определения координат 2.31-2.3N, которые объединены в N мобильных постов наблюдения 21-2N, каждый из которых имеет в составе радиолокационную станцию 2.1, N дополнительных каналов связи 31-3N для передачи радиолокационной информации, соединяющих выход каждой из N радиолокационных станций 2.11-2.1N с соответствующим входом радиолокационной информации пункта обработки информации 1.1, N дополнительных каналов связи 41-4N для передачи сигналов управления, соединяющих каждый из N управляющих выходов центрального блока управления 1.2 с входом соответствующего периферийного блока управления 2.21-2.2N, и N дополнительных каналов связи 51-5N для передачи координат расположения мобильных постов наблюдения 21-2N, соединяющих выход каждого из N блоков определения координат 2.31-2.3N с соответствующим входом приема координат центрального блока управления 1.2.
Пункт обработки информации 1.1 может быть реализован в виде известного устройства обработки информации (Справочник по основам радиолокационной техники. / Под ред. Дружинина В.В., Воениздат, 1967, с.548).
Центральный блок управления 1.2 может быть реализован в виде ПЭВМ (Фигурнов В.Э. IBM PC для пользователя. - М.: Финансы и статистика, 1992, с.17) с встроенным алгоритмом оптимального размещения радиолокационных станций (Моисеев А.И. Подход к решению задачи оптимального распределения средств наблюдения системы освещения обстановки. / А.И.Моисеев // Морская радиоэлектроника. - СПб.: Судостроение. - 2009. - №4, с.64-66), заключающийся в поиске оптимальных координат мобильных постов наблюдения 21-2N, при которых максимальна функция оценки эффективности наблюдения F.
В качестве радиолокационных комплексов 2.11-2.1N могут быть использованы аналогичные устройства прототипа.
Периферийные блоки управления 2.21-2.2N могут быть реализованы в виде устройства отображения информации (Фигурнов В.Э. IBM PC для пользователя. - М.: Финансы и статистика, 1992, С.17), которые представляют операторам радиолокационных комплексов 2.11-2.1N сигналы управления от центрального блока управления.
В качестве блоков определения координат 2.31-2.3N могут быть использованы системы спутниковой навигации (GPS) (Рапопорт Л.Б. Интегрированная система спутниковой и инерциальной навигации: экспериментальные результаты и применение к управлению мобильными роботами. / Л.Б.Рапопорт, М.Я.Ткаченко, В.Г.Могильницкий // Гироскопия и навигация. - 2006. - №3. - С.90-91).
Каналы связи 31-3N, 41-4N и 51-5N могут быть выполнены в виде известного устройства передачи данных (Шевкопляс Б.В. Микропроцессорные структуры. Инженерные решения. - М.: Радио и связь, 1986, с.105).
Устройство работает следующим образом. Первоначально N радиолокационных станций производят обнаружение и сопровождение целей. Причем при обнаружении целей радиолокационные станции 2.11-2.1N передают радиолокационную информацию по дополнительным каналам связи 31-3N на соответствующие входы радиолокационной информации пункта обработки информации 1.1.
Пункт обработки информации 1.1 принимает радиолокационную информацию на каждом входе радиолокационной информации, после чего производит ее объединение и совместную обработку. Совместная обработка радиолокационной информации с каждого мобильного поста наблюдения 21-2N позволяет уточнить координаты наблюдаемых целей, определить параметры траектории и произвести отождествление.
Затем определяют текущие координаты мобильных постов наблюдения 21-2N. Для этого блоки определения координат 2.31-2.3N вырабатывают и передают текущие координаты расположения мобильных постов наблюдения 21-2N в центральный блок управления 1.2 по дополнительным каналам связи 51-5N.
Далее центральный блок управления 1.2 запускает автоматически (либо по команде оператора) процедуру вычисления оптимальных координат мобильных постов наблюдения 21-2N. Для этого производится поиск максимума функции F оценки эффективности наблюдения. В результате получают набор оптимальных координат для каждого мобильного поста наблюдения 21-2N. После этого составляется план перемещения мобильных постов наблюдения 21-2N. Причем анализируются их текущие координаты и оценивается возможность смены текущих позиций В результате получаем Q (где 0≤Q≤N) целевых координат Q мобильных постов наблюдения 2Q.
Полученные целевые координаты передаются в периферийные блоки управления 2.2Q Q мобильных постов наблюдения 2Q через Q соответствующих дополнительных каналов связи 4Q для передачи сигналов управления. Приняв команду управления, операторы Q мобильных постов наблюдения 2Q производят перебазирование на позицию с соответствующими целевыми координатами.
После занятия целевых позиций Q мобильными постами наблюдения 2Q радиолокационные станции 2.11-2.1N продолжают процесс обнаружения и сопровождения целей с повышенной вероятностью.
Таким образом, введение в известное устройство центрального блока управления 1.2, периферийных блоков управления 2.21-2.2N, блоков определения координат 2.31-2.3N, а также дополнительных каналов связи 31-3N, 41-4N и 51-5N создает возможность сосредоточения радиолокационных станций 2.11-2.1N в зонах наблюдения с наиболее высокими требованиями, что повышает вероятность правильного обнаружения целей, а также повышает точность определения их координат.
Область применения изобретения может быть распространена для ситуаций выхода из строя (уничтожения) радиолокационных станций, а также появления новых радиолокационных станций.
Заявляемые способ и устройство были проверены на математической модели устройства и на экспериментальном стенде с четырьмя имитаторами радиолокационных станций. В итоге были получены следующие результаты: среднее повышение вероятности обнаружения целей составило 12,8%, а среднее повышение точности определения координат - 13,4%.
Вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного устройства следующей совокупности условий:
- средство, воплощающее заявленное устройство при его осуществлении, предназначено для использования в радиолокационных комплексах;
- для заявленного устройства в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке или известных до даты приоритета средств и методов;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить достижение усматриваемого заявителем технического результата.
Таким образом, заявленное изобретение соответствует критерию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| Способ многопозиционной радиолокации | 2021 |
|
RU2770827C1 |
| СПОСОБ КОМПЛЕКСНОГО ВЕДЕНИЯ РАДИОЛОКАЦИОННОЙ РАЗВЕДКИ СРЕДСТВАМИ АКТИВНОЙ, ПАССИВНОЙ И АКТИВНО-ПАССИВНОЙ ЛОКАЦИИ В ЕДИНОМ РАДИОЛОКАЦИОННОМ ПОЛЕ | 2024 |
|
RU2831131C1 |
| Многопозиционная радиолокационная система | 2019 |
|
RU2730184C1 |
| Радиолокационный комплекс раннего обнаружения нарушителей для охраны объекта | 2018 |
|
RU2695412C1 |
| СПОСОБ И КОМПЛЕКС БАРЬЕРНОГО ЗЕНИТНОГО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА БАЗЕ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2015 |
|
RU2615988C1 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2815918C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы | 2023 |
|
RU2825760C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
Изобретение может быть использовано в радиолокационных комплексах для обзора контролируемого пространства. Достигаемый технический результат - повышение вероятности правильного обнаружения и идентификации целей, а также повышение точности определения их координат. Указанный результат достигается за счет того, что N (где N≥1) блоков определения координат (БОК) вырабатывают текущие координаты расположения N позиций пунктов приема радиолокационной информации (ППРЛИ) и передают их по N дополнительным каналам связи в центральный блок управления (ЦБУ). ЦБУ по заданному алгоритму определяет оптимальные координаты N позиций ППРЛИ. Затем ЦБУ производит сравнение с текущими координатами N позиций ППРЛИ, определяет возможность смены позиций, составляют план перемещения и передает сигналы управления в Q (где 0≤Q≤N) периферийных блоков управления (ПБУ) по Q дополнительным каналам связи. После чего Q ППРЛИ изменяют свои позиции расположения в соответствии с полученными сигналами управления. Предлагаемое устройство состоит из центрального поста наблюдения, состоящего из пункта обработки информации и ЦБУ, N мобильных постов наблюдения, состоящий каждый из ПБУ, БОК и радиолокационной станции, N дополнительных каналов связи для передачи радиолокационной информации, N дополнительных каналов связи для передачи сигналов управления, N дополнительных каналов связи для передачи координат расположения. 2 н.п. ф-лы, 1 ил.
1. Способ обнаружения и сопровождения объектов радиолокационным комплексом, заключающийся в том, что в каждом пункте приема осуществляют прием, обработку и измерение параметров сигнала, определяют направление и время поступления сигнала, передают всю полученную информацию в главную управляющую персональную электронно-вычислительную машину, где выполняют объединение данных, отождествление параметров цели, затем определяют координаты и траекторию цели, отличающийся тем, что определяют текущие координаты разнесенных позиций пунктов приема радиолокационной информации, затем вырабатывают целевые координаты пунктов приема радиолокационной информации таким образом, чтобы обеспечить их оптимальное расположение с точки зрения распределения зон наблюдения пунктов приема радиолокационной информации, составляют план перемещения и передают на разнесенные позиции пунктов приема радиолокационной информации управляющие команды, после чего пункты приема радиолокационной информации изменяют свои позиции согласно принятым целевым координатам.
2. Радиолокационный комплекс, содержащий N (где N≥1) радиолокационных станций, осуществляющих обнаружение и сопровождение целей, отличающийся тем, что дополнительно введены центральный пост наблюдения, состоящий из пункта обработки информации и центрального блока управления, N периферийных блоков управления, предназначенных для представления операторам указанных N радиолокационных станций сигналов управления от центрального блока управления, и N блоков определения координат, при этом N периферийных блоков управления и N блоков определения координат объединены в N мобильных постов наблюдения, каждый из которых имеет в составе радиолокационную станцию из указанных N радиолокационных станций, причем блоки определения координат предназначены для выработки текущих координат расположения мобильных постов наблюдения, N каналов связи для передачи радиолокационной информации, соединяющих выходы каждой из N радиолокационных станций с соответствующим входом радиолокационной информации пункта обработки информации, N каналов связи для передачи сигналов управления, соединяющих каждый из N управляющих выходов центрального блока управления с входом соответствующего периферийного блока управления, и N каналов связи для передачи координат расположения мобильных постов наблюдения, соединяющих выход каждого из N блоков определения координат с соответствующим входом приема координат центрального блока управления, при этом пункт обработки информации предназначен для объединения и совместной обработки радиолокационной информации, уточнения координат наблюдаемых целей, определения параметров траекторий и их отождествления, центральный блок управления предназначен для вычисления оптимальных координат мобильных постов наблюдения, оценки возможности смены их текущих позиций, полученных целевых координат мобильных постов наблюдения, передачи целевых координат в периферийные блоки управления, при этом по командам периферийных блоков управления производят перебазирование мобильных постов наблюдения на позиции с соответствующими целевыми координатами.
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ЦЕЛИ В МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2330306C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ, КОМПЛЕКС РЛС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2150716C1 |
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| Способ получения нитровочно-кислотной смеси | 1945 |
|
SU67289A1 |
| US 5042743 A, 27.08.1991 | |||
| WO 2006114426 A1, 02.11.2006 | |||
| FR 2940429 A1, 25.06.2010 | |||
| ПРИБОР ДЛЯ УКРЕПЛЕНИЯ ПРОВОДОВ ТИПА КУЛО И Т. П. НА ДЕРЕВЯННОМ И Т. П. ОСНОВАНИИ | 1929 |
|
SU20170A1 |

