Изобретение относится к радиолокационной технике, а именно к способам построения многопозиционной радиолокации и может быть использовано для построения многопозиционных радиолокационных систем контроля санкционированного использования воздушного пространства.
Известен способ многопозиционной радиолокации [1 - патент РФ №2332684 «Способ многопозиционной радиолокации и устройство для его осуществления», МПК F41H 13/00, опубл. 27.08.2008 г.], заключающийся в излучении радиолокационных сигналов, синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций, объединении и совместной обработке сигналов и информации для обнаружения целей, измерения их координат, определения параметров траекторий и последующего отождествления, при этом согласно изобретению, аппаратурой разнесенных позиций осуществляют синхронизированные излучение и прием сигналов с использованием линий электропередачи. Устройство для многопозиционной радиолокации содержит пункт обработки информации, соединенный каналами связи и каналами синхронизации с аппаратурой разнесенных позиций, при этом аппаратура разнесенных позиций связана с линиями электропередачи.
Недостатком известного способа [1] является отсутствие распознавания воздушных объектов, что не позволяет эффективно использовать его для построения многопозиционных радиолокационных систем контроля санкционированного использования воздушного пространства. Также в способе [1] не передают из пункта обработки информации по обратному каналу связи команды для управления режимами работы каждой разнесенной позиции, а также не передают информацию о функциональной диагностике каждой разнесенной позиции в пункт обработки, что требует дополнительных операторов для эксплуатации каждой из разнесенных позиций.
Известен способ радиолокационного обзора пространства [2 - патент РФ №2667485 «Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления», МПК G01S 13/04, опубл. 20.09.2018 г.], заключающийся в подсветке пространства с помощью m≥2 передающих модулей (ПМ), приеме отраженных сигналов с помощью n≥2 приемных модулей (ПрМ), определении пеленгов на цель и передаче их на центр обработки информации и управления (ЦОУ), обзор пространства осуществляют с помощью передающих узкополосных модулей (ГГМу) и приемных узкополосных модулей (ПрМу), при обнаружении признаков движущейся цели определяют пеленг на нее, измеряют ее доплеровскую скорость, передают информацию на ЦОУ, с помощью широкополосных модулей (ПрМш) и по данным ЦОУ осматривают пеленги только в направлениях, где обнаружены признаки движущейся цели.
Недостатком известного способа [2] является отсутствие распознавания воздушных объектов, что не позволяет эффективно использовать его для построения многопозиционных радиолокационных систем контроля санкционированного использования воздушного пространства. Также в способе [2] не передают из пункта обработки информации по обратному каналу связи команды для управления режимами работы каждой разнесенной позиции, а также не передают информацию о функциональной диагностике каждой разнесенной позиции в пункт обработки, что требует дополнительных операторов для эксплуатации каждой из разнесенных позиций.
Наиболее близким по технической сущности к изобретению является способ построения многопозиционной радиолокации [3 - Патент РФ №2770827 «Способ многопозиционной радиолокации», МПК G01S 13/00, опубл. 22.04.2022 г.], принятый в качестве прототипа, при котором согласно способу, выполняют излучение радиолокационных сигналов и прием отраженных сигналов аппаратурой разнесенных позиций, выполняют обнаружение объектов, измерение их координат, определение параметров траекторий. При этом производят объединение и совместную обработку информации, получаемой от аппаратуры разнесенных позиций в пункте обработки информации, выполняют корректировку полученной информации посредством сопоставления информации, полученной от аппаратуры разных разнесенных позиций. Обнаружение объектов, измерение их координат и определение параметров траекторий выполняют аппаратурой разнесенных позиций, в качестве антенных систем которых используют активные фазированные антенные решетки. Для классификации воздушных объектов используют информацию от системы государственного опознавания с АФАР и аппаратуры автоматического зависимого наблюдения. Приемоизлучаюшую аппаратуру разнесенных позиций помещают под радиопрозрачным укрытием и устанавливают на возвышенностях местности или, при необходимости, на вышках. На пункт обработки информации от аппаратуры разнесенных позиций передают только информацию о траекториях обнаруженных объектов.
К недостаткам прототипа [3] следует отнести:
- в способе [3] для распознавания воздушных объектов используют только информацию от системы государственного опознавания и аппаратуры автоматического зависимого наблюдения, отсутствует передача информации о распознавании типов воздушных объектов, не оснащенных аппаратурой государственного опознавания и аппаратурой автоматического зависимого наблюдения, что не позволяет распознавать типы воздушных объектов, несанкционированно проникающих в контролируемое пространство;
- в способе не передают из пункта обработки информации по обратному каналу связи команды для управления режимами работы каждой разнесенной позиции, а также не передают информацию о функциональной диагностике каждой разнесенной позиции в пункт обработки, что требует дополнительных операторов для эксплуатации каждой из разнесенных позиций.
Технической задачей, на решение которой направлено предлагаемое изобретение, является повышение эффективности обнаружения воздушных объектов и снижение вероятности обнаружения ложных трасс за счет повышения информативности многопозиционной радиолокации в части распознавания воздушных объектов, которые не оборудованы или намеренно не включают систему государственного опознавания и автоматического зависимого наблюдения при проникновении в зону санкционированного использования воздушного пространства.
Для решения указанной технической задачи предлагается способ многопозиционной радиолокации, при котором выполняют излучение радиолокационных сигналов и прием отраженных сигналов аппаратурой разнесенных позиций. Обнаружение воздушных объектов, измерение их координат, определение параметров траекторий, а также распознавание типов воздушных объектов осуществляют первичным радиолокатором в составе аппаратуры разнесенных позиций, информацию о типах воздушных объектов передают на пункт обработки информации, также на пункт обработки информации с каждой разнесенной позиции передают информацию о функциональной диагностике, из пункта обработки информации на каждую разнесенную позицию передают команды для управления режимами их работы, включая управление несущими частотами излучения, управление зонами запрета автозахвата и управление параметрами обнаружения и трассового сопровождения воздушных объектов, причем режимы работы оптимизируют отдельно для каждой разнесенной позиции с учетом их взаимного влияния и совместной обработки получаемой от разнесенных позиций информации о траекториях обнаруженных воздушных объектов, информации о типах воздушных объектов и информации о функциональной диагностике, контроль функциональной диагностики разнесенных позиций осуществляют дистанционно и централизованно на пункте обработки информации.
Техническим результатом изобретения является возможность построения многопозиционных радиолокационных систем контроля санкционированного использования воздушного пространства с повышенной информативностью и с меньшим количеством эксплуатирующего персонала.
Проведенный сравнительный анализ заявленного способа и прототипа показывает, что их отличие заключается в следующем:
- в предлагаемом способе распознавание обнаруженных объектов осуществляется первичным радиолокатором каждой разнесенных позиций, в то время как в прототипе используется информация от системы государственного опознавания и аппаратуры зависимого наблюдения, что недостаточно для распознавания воздушных объектов при наблюдении воздушной обстановки, особенно в области ведения боевых действий и при несанкционированном использовании воздушного пространства беспилотными летательными аппаратами;
- в предлагаемом способе за счет использования двунаправленного канала передачи данных обеспечивается управление режимами работы каждой разнесенной позицией, а также получение на пункте обработки информации о функциональной диагностике каждой разнесенной позиции, в то время как в прототипе за счет использования системы передачи данных обеспечивается передача только параметров траекторий обнаруженных воздушных объектов от аппаратуры каждой разнесенной позиции;
- в предлагаемом способе из пункта обработки информации на каждую разнесенную позицию передают команды для управления режимами их работы, включая управление несущими частотами излучения, управление зонами запрета автозахвата и управление параметрами обнаружения и трассового сопровождения воздушных объектов, причем режимы работы оптимизируют отдельно для каждой разнесенной позиции с учетом их взаимного влияния и совместной обработки получаемой от разнесенных позиций информации о траекториях обнаруженных воздушных объектов, информации о типах воздушных объектов и информации о функциональной диагностике в отличие от прототипа, где совместная обработка информации не используется для оптимизации режимов работы отдельных позиций.
Сочетание отличительных признаков и свойств предлагаемого способа многопозиционного обзора из литературы не известно, поэтому он соответствует критериям «новизна» и «изобретательский уровень».
Доказательства возможности осуществления способа многопозиционной радиолокации приводятся ниже на конкретном примере системы контроля воздушного пространства, реализующей данный способ многопозиционной радиолокации.
Этот характерный пример использования многопозиционной радиолокации в конкретной системе контроля воздушного пространства ни в коей мере не ограничивает его объем правовой защиты. В этом примере дана лишь конкретная иллюстрация предлагаемого осуществления способа многопозиционной радиолокации в системе контроля воздушного пространства.
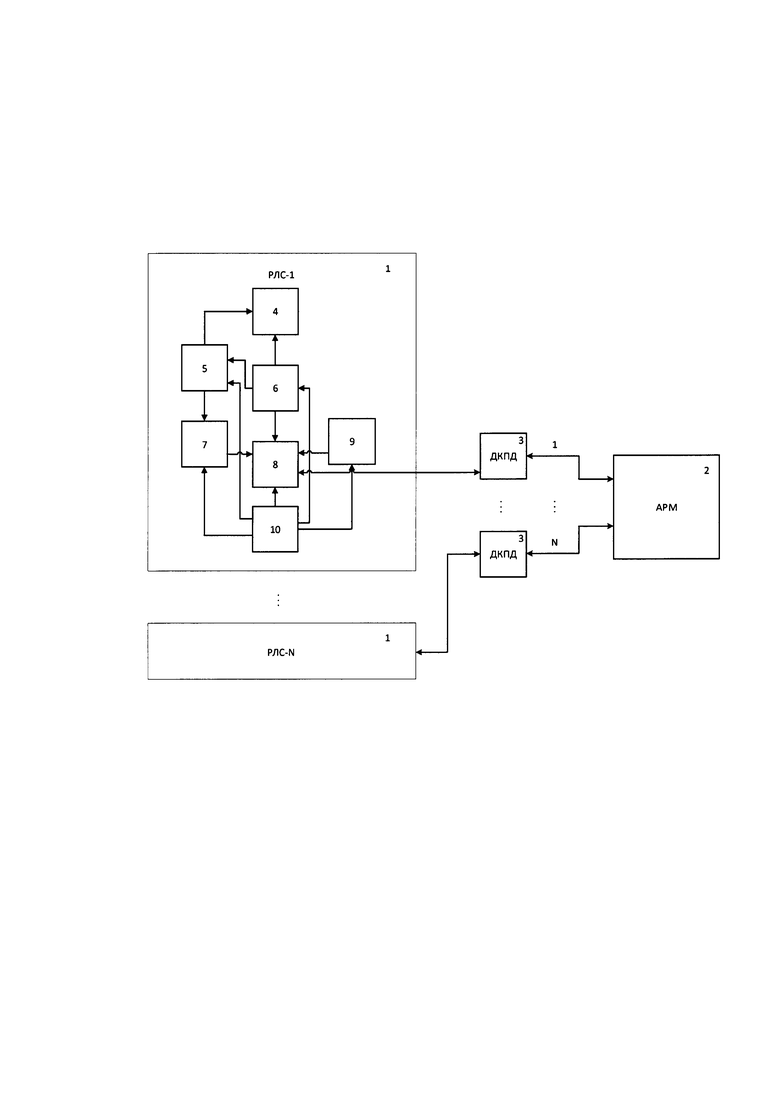
На фигуре представлена схема системы контроля воздушного пространства, реализующая данный способ многопозиционной радиолокации.
Система содержит N разнесенных позиций с аппаратурой в виде радиолокационных станций (РЛС) 1 и пункт обработки информации, представляющий собой автоматизированное рабочее место (АРМ) оператора 2, которые соединены двунаправленным каналом передачи данных (ДКПД) 3. Каждая РЛС 1 содержит фазированную антенную решетку с радиопрозрачным укрытием (ФАР) 4, модуль приемопередающий (НИМ) 5, синтезатор опорных частот (СЧ) 6, модуль приемный четырехканальный (ПМ) 7, блок обработки сигналов и управления (БОУ) 8, в состав которого входит блок функциональной диагностики (БФД) 9, система электропитания (СЭП) 10.
Способ многопозиционной радиолокации работает в составе устройства на фигуре следующим образом.
Выполняют обзор пространства путем излучения зондирующих сигналов и осуществляют прием и обработку отраженных сигналов от воздушных объектов и подстилающей поверхности первичным радиолокатором РЛС 1 из состава каждой разнесенной позиций, в качестве антенных систем которых используется фазированные антенные решетки. Используя БОУ 8 каждой из N разнесенных позиций, производят обработку первичной и вторичной радиолокационной информации и выполняют обнаружение воздушных объектов, измерение их координат, определение параметров траекторий, осуществляют распознавание типа воздушных объектов. По ДКПД 3 от каждой разнесенной позиции на АРМ 2 пункта обработки информации осуществляют передачу измеренных координат воздушных объектов, параметров их траекторий и информацию о типе обнаруженного воздушного объекта, а также информацию о функциональной диагностике каждой РЛС 1. С помощью БФД 9 из состава БОУ 8 используя ДКПД 3 дистанционно и централизованно выполняют работы по регистрации параметров технического состояния ФАР 4, ППМ5, СЧ6, ПМ7, СЭП10 из состава РЛС 1, и их исправности. Производят объединение и совместную обработку информации, полученной от каждой РЛС 1 N разнесенных позиций в пункте обработки информации на АРМ 2. Из пункта обработки информации АРМ 2 на каждую разнесенную позицию используя ДКПД 3 передают команды для управления режимами их работы, включая управление несущими частотами излучения, выставление зон запрета излучения и зон запрета автозахвата и управления параметрами обнаружения воздушных объектов и их трассового сопровождения, причем режимы работы РЛС 1 оптимизируют отдельно для каждой разнесенной позиции с учетом их взаимного влияния и совместной обработки информации выполняемой на АРМ 2, получаемой от аппаратуры разнесенных позиций.
В предлагаемом способе используют распознавание воздушных объектов по совокупности траекторных и энергетических характеристик, распознавание осуществляют в каждой распределенной позиции в РЛС 1 и передают на пункт обработки информации (АРМ 2);
в предлагаемом способе для устранения взаимного влияния и обеспечения электромагнитной совместимости применяют централизованное управление из АРМ 2 несущими частотами излучения каждой РЛС 1. Распределение частот осуществляют с учетом взаимного расположения РЛС 1 на разнесенных позициях и их секторов ответственности, что позволяет снизить взаимные непреднамеренные помехи и повысить вероятность обнаружения воздушных объектов;
в предлагаемом способе для своевременного выявления технических неисправностей РЛС 1 предусмотрен БФД 9, позволяющий удаленно проводить функциональную диагностику РЛС 1 и заранее определять объем ремонтных работ, также применяют централизованное управление из АРМ 2 параметрами обзора и несущими частотами каждой РЛС 1, что позволяет эксплуатировать РЛС без присутствия операторов на разнесенных позициях и существенно снижает затраты на эксплуатацию изделия.
На предприятии-заявителе разработана конструкторская документация системы контроля воздушного пространства, реализующей данный способ многопозиционной радиолокации, изготовлен опытный образец, успешно прошедший испытания, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ многопозиционной радиолокации | 2021 |
|
RU2770827C1 |
| Радиолокационный комплекс раннего обнаружения нарушителей для охраны объекта | 2018 |
|
RU2695412C1 |
| Способ построения системы IoT для организации мониторинга и контроля воздушного пространства | 2024 |
|
RU2835361C1 |
| НАЗЕМНО-КОСМИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324951C2 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332684C1 |
| Система обработки радиолокационной информации | 2023 |
|
RU2815274C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
Изобретение относится к радиолокационной технике, а именно к способам многопозиционной радиолокации. Технический результат: повышение эффективности обнаружения воздушных объектов и снижение вероятности обнаружения ложных трасс за счет повышения информативности многопозиционной радиолокации в части распознавания воздушных целей. Такой результат обеспечивается за счет того, что распознавание типов воздушных объектов осуществляют первичным радиолокатором в составе аппаратуры разнесенных позиций, информацию о типах воздушных целей передают на пункт обработки информации, также на пункт обработки информации с каждой разнесенной позиции передают информацию о функциональной диагностике, из пункта обработки информации на каждую разнесенную позицию передают команды для управления режимами их работы, управление режимами работы разнесенных позиций и контроль их функциональной диагностики осуществляют дистанционно и централизованно на пункте обработки информации, причем режимы работы каждой из разнесенных позиций оптимизируют отдельно для каждой из позиций с учетом совместной обработки информации, получаемой от аппаратуры разнесенных позиций. 1 ил.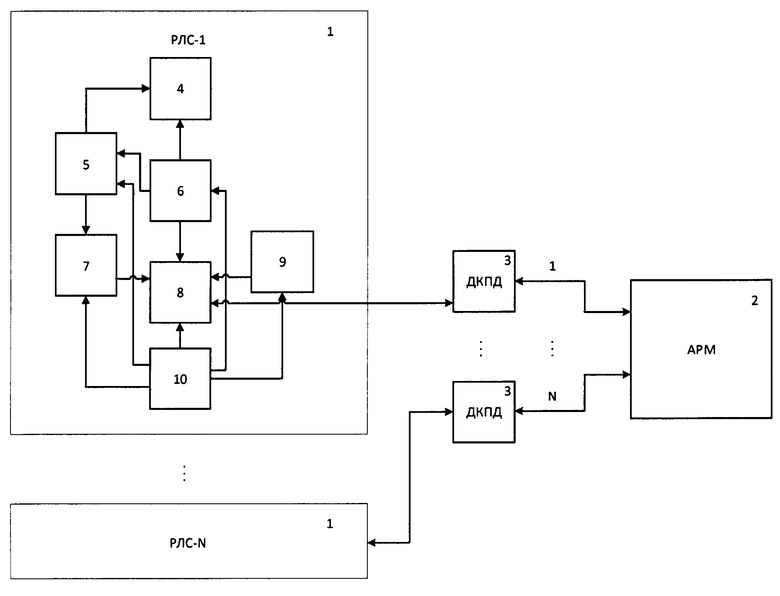
Способ многопозиционной радиолокации, при котором выполняют излучение радиолокационных сигналов и прием отраженных сигналов аппаратурой разнесенных позиций, выполняют обнаружение воздушных объектов, измерение их координат, определение параметров траекторий, при этом производят объединение и совместную обработку информации, получаемой от аппаратуры разнесенных позиций в пункте обработки информации, обнаружение воздушных объектов, измерение их координат и определение параметров траекторий выполняют аппаратурой разнесенных позиций, в качестве антенных систем аппаратуры разнесенных позиций используют фазированные антенные решетки, аппаратуру разнесенных позиций устанавливают на возвышенностях местности, на вышках или зданиях, при этом на пункт обработки информации от аппаратуры разнесенных позиций передается информация о траекториях обнаруженных воздушных объектов, отличающийся тем, что распознавание типов воздушных объектов осуществляют первичным радиолокатором в составе аппаратуры разнесенных позиций, информацию о типах воздушных объектов передают на пункт обработки информации, также на пункт обработки информации с каждой разнесенной позиции передают информацию о функциональной диагностике, из пункта обработки информации на каждую разнесенную позицию передают команды для управления режимами их работы, включая управление несущими частотами излучения, управление зонами запрета автозахвата и управление параметрами обнаружения и трассового сопровождения воздушных объектов, причем режимы работы оптимизируют отдельно для каждой разнесенной позиции с учетом их взаимного влияния и совместной обработки получаемой от разнесенных позиций информации о траекториях обнаруженных воздушных объектов, информации о типах воздушных объектов и информации о функциональной диагностике, контроль функциональной диагностики разнесенных позиций осуществляют дистанционно и централизованно на пункте обработки информации.
| Способ многопозиционной радиолокации | 2021 |
|
RU2770827C1 |
| Гидравлические ручные ножницы | 1959 |
|
SU125723A1 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| Автоклав для выращивания и получения сухих спор, например, Аspergillus | 1956 |
|
SU106063A1 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332684C1 |
| US 8723721 B2, 13.05.2014. | |||

