Область техники, к которой относится изобретение.
Изобретение относится к способам определения модуля и угла биения вращающегося ротора газовой центрифуги (ГЦ) путем анализа сигнала с индуктивного датчика сигнализации вращения (СВ) ГЦ. Модуль биения характеризует величину колебаний ротора ГЦ, вызванных остаточным дисбалансом, в радиальном направлении. Угол биения характеризует направление дисбаланса ротора относительно заданного направления.
Уровень техники.
При вращении роторов ГЦ (фиг.1) в силу наличия остаточных дисбалансов может происходить отклонение геометрической оси 2 ротора 1 от его оси вращения 6. В результате этого возникают периодические колебания ротора как в торцевом, так и в радиальном направлениях. Для количественного описания этих колебаний применительно к ГЦ используют понятие биения (Труба с обмоткой. Технические условия 02648-01-0128ТУ1. Контроль биений. Уральский электрохимический комбинат, 2002). Различают торцевое и радиальное биение ротора. Последнее именуют просто биением и определяют как разность наибольшего и наименьшего расстояний от точек реального профиля поверхности вращения до базовой оси в сечении плоскостью, перпендикулярной базовой оси (ГОСТ 24642-81 Допуски формы и расположения поверхностей. Основные термины и определения). Под базовой осью в данном случае понимают ось вращения. Выделяют модуль биения 3 и угол биения 4. Модуль биения определяет величину колебания профиля поверхности вращения ротора в заданном сечении. Угол биения определяет поворот линии, соединяющий центр вращения 6 и геометрический центр ротора 2 относительно выбранного направления 5 в заданном сечении ротора. Геометрический центр 2 ротора является точкой пересечения геометрической оси ротора (оси симметрии) с заданной плоскостью измерения биения, находящейся на определенной высоте относительно горловины ротора. Центр вращения 6 ротора является точкой пересечения оси вращения ротора с той же плоскостью.
Биение роторов определяют различными способами. Наиболее удобным при промышленной эксплуатации ГЦ являются способы определения биений путем анализа сигнала с датчика СВ, входящего в состав ГЦ (фиг.2). Датчик представляет собой катушку индуктивности 9, на которой наводится переменное напряжение за счет вращения индуктора 10, впрессованного в верхнюю крышку ротора 1, в поле постоянного магнита 8. Биения возникают при отклонении геометрической оси ротора от его оси вращения. При этом также происходит отклонение индуктора и изменяется сигнал с датчика СВ. По величине изменения этого сигнала можно определить биение ротора.
Известен способ определения биений роторов ГЦ по соотношению амплитуд спектральных составляющих сигнала с датчика СВ (Способ определения колебаний вращающегося ротора, патент РФ №2180435, кл. В04В 9/14, 1999). Для реализации способа определяют спектр сигнала с датчика СВ, по его виду судят о наличии и характере биений ротора и рассчитывают их величину.
Недостатком указанного способа является необходимость получения спектра сигнала с датчика СВ. Штатные системы контроля частоты вращения ГЦ не позволяют получать спектр сигнала, что препятствует использованию способа совместно с такими системами. Возникает необходимость применять специализированные приборы определения спектра, что влечет за собой дополнительные денежные и временные затраты.
Наиболее близким по технической сущности является способ определения биений, используемый в приборе ИБР (Измеритель биений роторов ИБР, Руководство по эксплуатации, еК 2.390.262 РЭ, Уральский электрохимический комбинат, 2004), выбранный в качестве прототипа. Данный способ основан на последовательном измерении длительностей периодов сигнала с датчика СВ, за время полного оборота ротора, и расчета модуля и угла биения по формулам, связывающим их с длительностями измеренных периодов.
Недостатком указанного способа является то, что некоторые периоды в сигнале с датчика СВ являются искаженными, например периоды, соответствующие укороченному выступу индуктора (УВИ), что не учитывается в методе ИБР и приводит к ошибкам в расчете биений.
Раскрытие изобретения.
Сущность заявленного способа заключается в определении модуля и угла биения ротора ГЦ путем выполнения следующих действий:
- получения набора длительностей периодов сигнала с датчика СВ  путем последовательного измерения длительностей N периодов в сигнале с датчика СВ ГЦ любым пригодным для этой цели измерительным прибором, где N - число выступов индуктора;
путем последовательного измерения длительностей N периодов в сигнале с датчика СВ ГЦ любым пригодным для этой цели измерительным прибором, где N - число выступов индуктора;
- выбора системы координат XOY с началом в геометрическом центре ротора;
- выполнения анализа полученного набора длительностей Tmνi с целью определения координат центра вращения индуктора (xRC; yRC) в выбранной системе координат с привлечением методов математического программирования:
- в качестве искомых параметров для задачи математического программирования используются все физически возможные координаты центра вращения ротора (х, y) с шагом Δх по оси ОХ и Δy по оси OY;
- задается система уравнений, зависящих от искомых параметров:
где Δi - абсолютное отклонение измеренной длительности Tmνi от расчетной Tcνi для i-го периода;
Tmνi - измеренная длительность i-го периода;
Tcνi - расчетная длительность i-го периода, определяемая по аналитической зависимости:

где х, y - координаты центра вращения;
- аналитические зависимость (2) получаются исходя из геометрической формы индуктора с учетом особенностей взаимодействия системы индуктор - датчик СВ;
- в качестве ограничений, накладываемых на неизвестные параметры, используется следующее неравенство:

где  - сумма абсолютных отклонений измеренных длительностей Tmνi от расчетных Tcνi;
- сумма абсолютных отклонений измеренных длительностей Tmνi от расчетных Tcνi;
ΔМАХ - заданная максимальная сумма абсолютных отклонений измеренных длительностей от расчетных;
- в качестве решения принимаются все координаты (xRC j; yRC j), удовлетворяющие условию (3) с учетом (1) и (2), решение ищется путем перебора возможных значений (х, y) или методами, принятыми в теории математического программирования;
- за искомые координаты центра вращения (xRC; yRC) принимаются координаты среднего места точек (xRC j; yRC j);
- расчета по найденным координатам центра вращения (xRC; yRC) модуля биения:

где b - модуль биения;
xRC, yRC - координаты центра вращения;
- расчета по найденным координатам центра вращения (xRC; yRC) угла биения в направлении оси ОХ выбранной системы координат:
где φ - угол биения относительно оси ОХ системы координат;
xRC, yRC - координаты центра вращения;
- первой модификацией заявленного способа является способ, в котором при нахождении координат центра вращения (xRC; yRC) из N уравнений системы (1) исключается часть уравнений, соответствующая периодам в сигнале с датчика СВ, которые признанно вносят значительные ошибки в результаты расчета биений, например периоды, соответствующие скошенным или укороченным выступам индуктора;
- второй модификацией заявленного способа является способ, в котором при нахождении координат центра вращения (xRC; yRC) по уравнениям (1), (2), (3) условие (3) заменяется на аналогичное или на систему неравенств, ограничивающих рассчитанные значения Δi.
Техническим результатом использования заявленного способа является получение информации о модуле и угле биения ротора ГЦ, которая позволяет прогнозировать изменение технического состояния ГЦ, оптимизировать сроки вывода ГЦ в ремонт, принимать необходимые меры для стабильной работы ГЦ. Все это, в свою очередь, приводит к сокращению потерь работы разделения.
Заявленный способ отличается от прототипа в части математической обработки измеренных длительностей периодов сигнала с датчика СВ. В способе-прототипе используются предложенные авторами ЦБР функциональные зависимости между модулем и углом биения и измеренными длительностями периодов  ,
,  , тогда как в заявленном способе измеренные длительности периодов используются в качестве параметров для алгоритма поиска оптимального решения. Расчет биений по методу ИБР является аналитическим, расчет, используемый в заявленном способе, - алгоритмический.
, тогда как в заявленном способе измеренные длительности периодов используются в качестве параметров для алгоритма поиска оптимального решения. Расчет биений по методу ИБР является аналитическим, расчет, используемый в заявленном способе, - алгоритмический.
Краткое описание чертежей.
На фиг.1 представлены два крайних положения сечения ротора ГЦ при повороте вокруг оси вращения, смещенной относительно геометрической оси. Обозначения: 1 - исходное положение ротора; 2 - геометрическая ось ротора (ось симметрии), геометрический центр ротора в заданном сечении; 3 - модуль биения; 4 - угол биения; 5 - направление, относительно которого отсчитывается угол биения; 6 - ось вращения ротора, центр вращения ротора в заданном сечении; 7 - положение ротора после поворота на 180 градусов.
На фиг.2 показано устройство датчика СВ ГЦ. Обозначения: 1 - ротор ГЦ; 8 - постоянный магнит, располагающийся в корпусе ГЦ; 9 - катушка индуктивности датчика СВ; 10 - индуктор, при вращении которого на катушке датчика СВ наводится переменное напряжение.
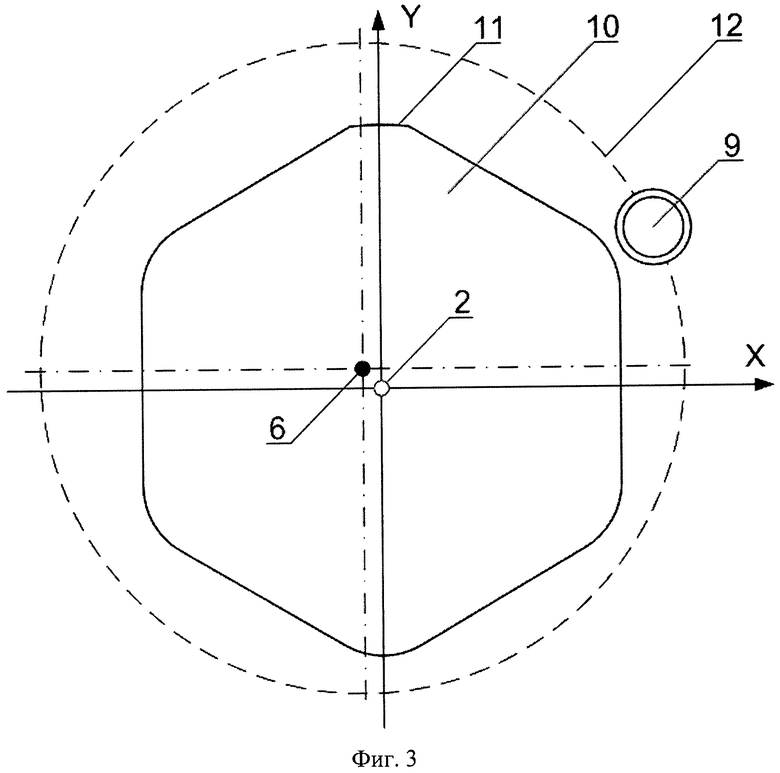
На фиг.3 представлен пример шестигранного индуктора ротора, вращающегося в непосредственной близости от датчика СВ. Обозначения: 2 - геометрический центр ротора в плоскости индуктора; 6 - центр вращения ротора в плоскости индуктора; 9 - катушка датчика СВ; 10 - индуктор без горловины ротора; 11 - укороченный выступ индуктора; 12 - окружность, на радиусе которой располагается катушка датчика СВ, центром окружности является центр вращения ротора; XY - выбранная система координат с началом в геометрическом центре ротора.
Осуществление изобретения.
Рассмотрим ротор с шестигранным индуктором (фиг.3), у которого один выступ 11 короче, чем остальные пять. При вращении индуктора 10 на катушке датчика СВ 9 наводится переменное напряжение за счет изменения магнитного потока, проходящего через катушку датчика.
При прохождении граней и выступов индуктора наиболее близко к датчику СВ изменение магнитного потока через катушку датчика становится равным нулю. Таким образом, в сигнале с датчика СВ можно выделить шесть периодов или двенадцать полупериодов, соответствующих моментам прохождения граней и выступов мимо датчика СВ. За счет наличия укороченного выступа амплитуда двух полупериодов из двенадцати будет меньше остальных. Периоды можно измерять по граням индуктора, когда время одного периода соответствует повороту индуктора от одной грани до другой, или по вершинам, когда время одного периода соответствует повороту индуктора от одного выступа до другого.
Измерение периодов сигнала  с датчика СВ производят по вершинам последовательно. Начало измерения синхронизируют с укороченным выступом индуктора (УВИ) так, чтобы первым периодом Tmν1 был период, начало которого соответствует прохождению УВИ наиболее близко к датчику СВ. Такую синхронизацию можно осуществить по результатам измерения амплитуд. Амплитуды полупериодов до и после УВИ меньше остальных десяти полупериодов примерно на 20%.
с датчика СВ производят по вершинам последовательно. Начало измерения синхронизируют с укороченным выступом индуктора (УВИ) так, чтобы первым периодом Tmν1 был период, начало которого соответствует прохождению УВИ наиболее близко к датчику СВ. Такую синхронизацию можно осуществить по результатам измерения амплитуд. Амплитуды полупериодов до и после УВИ меньше остальных десяти полупериодов примерно на 20%.
Для измерения длительностей периодов Tmνi используют любой прибор, который обеспечивает последовательное измерение периодов с синхронизацией относительно УВИ, например прибор МИП4У (Модуль измерения периодов МИП4У. Руководство по эксплуатации. 628РЭ ИВЦ, Производственное объединение «Электрохимический завод», 2006).
Вводят систему координат, связанную с индуктором, как показано на фиг.3. Начало координат соответствует геометрическому центру ротора 2, ось OY проведена в направлении УВИ 11.
Используя информацию о геометрии индуктора, получают уравнения, связывающие координаты центра вращения 6 в выбранной системе координат с длительностями периодов  , как указано в (2):
, как указано в (2):
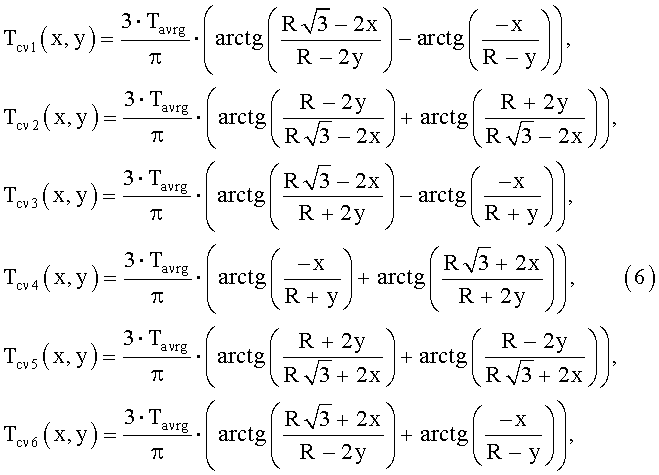
где Tcνi - расчетная длительность i-го периода;
Taνrg - средняя длительность измеренных периодов  ;
;
R - параметр, связанный с положением центров округлений выступов индуктора относительно геометрического центра ротора, может быть уточнен экспериментально;
х, y - координаты центра вращения.
Из практики измерения биений роторов ГЦ известно, что два периода сигнала с датчика СВ с номерами 1 и 6 вносят значительные ошибки в результаты расчета биений в силу влияния УВИ, поэтому из системы уравнения (6) исключают первое и последние уравнение и с учетом (1) получают:

где Δi - абсолютное отклонение измеренной длительности Tmνi от расчетной Tcνi для i-го периода;
остальные обозначения в формуле соответствуют обозначениям (6).
Из практики эксплуатации ГЦ известно, что величина биения не превышает bMAX, тогда возможные значения координат центра вращения (х, y) с учетом (4):

где х, y - координаты центра вращения индуктора;
bMAX - максимально возможный модуль биения ротора.
Определяют ΔMAX для использования условия (3) следующим образом:

где ΔMAX - заданная максимальная сумма абсолютных отклонений измеренных длительностей Tmνi от расчетных Tcνi;
ΔMIN - минимальное значение суммы абсолютных отклонений измеренных длительностей Tmνi от расчетных Tcνi согласно (7), достижимое при определенных координатах центра вращения (xΔMIN; yΔMIN);
р - ширина в процентах области возможного положения координат центра вращения.
Выполнив измерения длительностей периодов сигнала с датчика СВ и определив  , используют электронную вычислительную машину (ЭВМ) для расчета значений абсолютных отклонений Δi по системе уравнений (7) для каждой точки возможного положения центра вращения (х, y) с шагом Δх по оси ОХ и Δy по оси OY в пределах (8).
, используют электронную вычислительную машину (ЭВМ) для расчета значений абсолютных отклонений Δi по системе уравнений (7) для каждой точки возможного положения центра вращения (х, y) с шагом Δх по оси ОХ и Δy по оси OY в пределах (8).
Среди рассчитанных значений Δi определяют минимальное значение ΔMIN. По формуле (9), задавая значение р в пределах 5÷10%, рассчитывают значение ΔMAX. Используя ЭВМ, определяют все точки возможных положений координат центра вращения (xRC j; yRC j), для которых выполняется условие (3) с учетом (7). Определяют среднее место точек (xRC j; yRC j), которое принимают в качестве реального положения центра вращения (xRC; yRC). По координатам центра вращения рассчитывают модуль и угол биения по формулам (4) и (5) соответственно.

Изобретение относится к балансировочной технике, в частности к способам определения биения вращающегося ротора газовой центрифуги (ГЦ) путем анализа сигнала с индуктивного датчика вращения (датчик сигнализации вращения, СВ). Биение ротора возникает при его вращении вследствие отклонения геометрической оси ротора от его оси вращения и проявляется в виде колебаний ротора в радиальном направлении. В сигнале с датчика СВ можно выделить N отдельных периодов, соответствующих N выступам (вершинам) индуктора датчика. При наличии биения длительности периодов изменяются. Одни периоды сигнала становятся длиннее, другие короче. Производя последовательное измерение длительностей периодов, можно определить положение оси вращения ротора относительно геометрической оси и рассчитать модуль и угол биения. Технический результат заключается в повышении точности информации о текущем состоянии ротора. 1 з.п. ф-лы, 3 ил.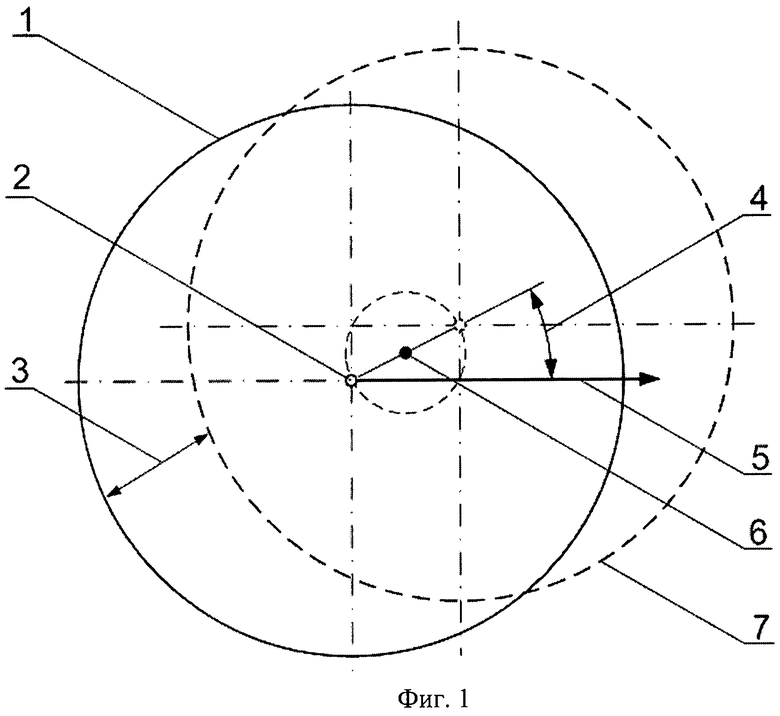
1. Способ определения модуля и угла биения ротора газовой центрифуги (ГЦ) путем анализа длительностей измеренных последовательно периодов сигнала с индуктивного датчика сигнализации вращения (СВ) ГЦ, отличающийся тем, что измерение длительностей периодов , где N - число выступов индуктора, выполняют по переходу сигнала через ноль таким образом, чтобы длительность каждого периода соответствовала интервалу времени между моментами прохождения соседних вершин индуктора наиболее близко к датчику СВ, а первый измеренный период Tmν1 был периодом, начало которого соответствует прохождению укороченного выступа индуктора наиболее близко к датчику СВ, что определяется по наличию полупериодов, амплитуды напряжений которых меньше амплитуды остальных полупериодов в сигнале с датчика СВ, по результатам измерения длительностей периодов Tmνi в выбранной системе координат XOY с началом в геометрическом центре ротора определяют координаты центра вращения ротора (xRC, yRC) с привлечением методов теории математического программирования и рассчитывают по ним модуль и угол биения:
в качестве искомых параметров для задачи математического программирования используют все физически возможные координаты центра вращения ротора (х, y) в выбранной системе координат с шагом Δх по оси ОХ и Δy по оси OY;
задают систему уравнений, зависящих от искомых параметров:
где Δi - абсолютное отклонение измеренной длительности Tmνi от расчетной Tcνi для i-го периода;
Tmνi - измеренная длительность i-го периода;
Tcνi - рассчитанная по аналитической зависимости длительность i-го периода:
где х, y - координаты центра вращения;
аналитическую зависимость (2) получают, исходя из геометрической формы индуктора с учетом особенностей взаимодействия системы индуктор-датчик СВ;
в качестве ограничений, накладываемых на искомые параметры, используют следующее неравенство:

где - сумма абсолютных отклонений измеренных длительностей Tmνi от расчетных Tcνi;
Δмах - заданная максимальная сумма абсолютных отклонений;
в качестве решения принимают все координаты (xRCj, yRCj), удовлетворяющие условию (3) с учетом (1) и (2), решение ищется путем перебора возможных значений (х, y) или методами, принятыми в теории математического программирования;
за искомые координаты центра вращения (xRC, yRC) принимают координаты среднего места точек (xRCj, yRCj);
по координатам центра вращения (xRC, yRC) рассчитывают модуль биения b:

где b - модуль биения;
xRC, yRC - координаты центра вращения;
по координатам центра вращения (xRC, yRC) рассчитывают угол биения в направлении оси ОХ в выбранной системе координат:
где φ - угол биения относительно оси ОХ системы координат;
xRC, yRC - координаты центра вращения.
2. Способ определения модуля и угла биения ротора газовой центрифуги по п.1, отличающийся тем, что при нахождении координат центра вращения (xRC, yRC) из N уравнений системы (1) исключают часть уравнений, соответствующих периодам в сигнале с датчика СВ, которые признанно вносят значительные ошибки в результаты расчета биений, например периоды, соответствующие скошенным или укороченным выступам индуктора.
| Измеритель биений роторов ИБР, Руководство по эксплуатации, eK2.390.262 РЭ, Уральский электрохимический комбинат, 2004 | |||
| СПОСОБ ДИАГНОСТИКИ И ОЦЕНКИ ВИБРОАКТИВНОСТИ СТАНКОВ, РАБОТАЮЩИХ С ЛЕЗВИЙНЫМ ИНСТРУМЕНТОМ | 2006 |
|
RU2332652C1 |
| US 4096988 А, 27.06.1978 | |||
| СПОСОБ ОЦЕНКИ ДИСБАЛАНСА РОТОРА | 1989 |
|
RU2010205C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ВРАЩАЮЩЕГОСЯ РОТОРА | 1999 |
|
RU2180435C2 |
| УСТРОЙСТВО ЭЛЕКТРОПИТАНИЯ ЭЛЕКТРОННЫХ ПРИБОРОВ | 2015 |
|
RU2597203C1 |

