Изобретение относится к измерительной технике и может быть использовано для оценки деформации статора (ДС) газотурбинного двигателя (ГТД), смещений его геометрического центра относительно центра вращения ротора, а также для определения амплитуды и ориентации биений контролируемого рабочего колеса ротора.
Известны способы измерения радиальных смещений лопаток и лопастей ГТД, которые предусматривают использование кластеров одновитковых вихретоковых датчиков (ОВТД) с чувствительными элементами (ЧЭ) в виде отрезка проводника [патент РФ №2272990 «Способ измерения многомерных перемещений и обнаружения колебаний торцов лопаток ротора турбомашины», кл. G01B 7/14, 2002] либо кластерных разновидностей ОВТД, предусматривающих объединение кластера датчиков в единой конструкции [Боровик С.Ю., Секисов Ю.Н., Скобелев О.П. Обобщенное представление методов получения измерительной информации о координатах смещений торцов лопаток и лопастей // Мехатроника, автоматизация, управление №3, 2007. Приложение с.19-24]. Количество и расположение датчиков в кластере (ЧЭ в кластерном датчике) зависит от характера измеряемых многомерных перемещений торца лопасти или лопатки и определяется видом и числом координатных составляющих многомерных перемещений торца лопасти или лопатки в выбранной системе отсчета. При этом измерительную информацию по всем координатным составляющим получают путем совокупной обработки сигналов измерительных каналов с ЧЭ датчика на основе экспериментальных градуировочных характеристик, снятых предварительно.
Следует отметить, что найденные значения координатных составляющих многомерных перемещений и, в частности радиальные зазоры (РЗ), зависят не только от смещений торца лопатки или лопасти в радиальном направлении, но и от ДС в месте установки датчика. Другими словами, в значении РЗ содержится информация о ДС, представляющая самостоятельный интерес для разработчика двигателя.
Наиболее близким по технической сущности к предлагаемому изобретению является способ оценки деформации статорной оболочки винтовентилятора авиационного газотурбинного двигателя по источнику [Боровик С.Ю., Секисов Ю.Н., Скобелев О.П. Метод оценки деформаций статорной оболочки винтовентилятора авиационного газотурбинного двигателя // Проблемы управления и моделирования в сложных системах: Труды IX Международной конференции. - Самара: Самарский научный центр РАН, 2007 - С.234-237]. В соответствии с этим способом, оценку деформации статорной оболочки в местах размещения кластеров датчиков зазора получают путем совокупной обработки результатов измерений РЗ между торцами лопастей винта и ЧЭ ОВТД, расположенных равномерно по периметру статорной оболочки на уровне ее внутренней поверхности внутри зоны взаимодействия электромагнитного поля ЧЭ датчиков с торцом лопасти винта, полученных в режиме «холодной прокрутки» перед испытаниями, подобных измерений РЗ, но уже в рабочих режимах, а также численного моделирования упругих и температурных деформаций лопасти по регулярно измеряемым значениям частоты вращения винта и температуры среды, в которой находится винт.
Однако, при наличии радиальных биений ротора, известный способ не позволяет отличить их от ДС, что, естественно, приводит к погрешности в ее оценке.
Цель изобретения - обнаружение и раздельная количественная оценка деформации статора ГТД, смещения его геометрического центра относительно центра вращения ротора, амплитуды и ориентации биений рабочего колеса ротора ГТД.
Указанная цель достигается тем, что в известные способы вводят дополнительные расчетные операции, которые по совокупности результатов измерений и численного моделирования позволяют получить оценки ДС, размер и направление смещения его геометрического центра относительно центра вращения контролируемого рабочего колеса ротора, а также определить амплитуду и ориентацию биения в диаметральной плоскости рабочего колеса ротора.
Для этого, как и в известном способе, ориентированном на использование прямоугольной системы координат, на статоре устанавливают с равномерным шагом 90° четыре кластера ОВТД. Начало системы отсчета координат размещают в центре вращения контролируемого рабочего колеса ротора (точка О). Размещают ЧЭ датчиков на уровне внутренней поверхности статора в пределах зоны взаимодействия электромагнитного поля каждого ЧЭ с торцами лопаток рабочего колеса ротора.
На фиг.1 показан вариант размещения четырех кластеров ОВТД (1, 2, 3, 4) на статоре ГТД. Здесь же представлены ДС после сборки и монтажа (5), ДС в рабочем режиме (6), а также показана зона биений колеса ротора на малых оборотах (7). На фиг.1 предполагается, что смещения геометрического центра статора относительно центра вращения колеса ротора отсутствуют. Кроме того, для наглядности изображения различные узлы ГТД на фиг.1 представлены в различных масштабах (у реальных изделий размер диаметра ротора и статора имеет метровый порядок, а зазоры между торцами лопаток и статором - единицы миллиметров).
Для простоты рассуждений предполагается, что все лопатки контролируемого колеса одинаковы по размерам и свойствам (в противном случае необходимо учитывать индивидуальные особенности каждой лопатки), а статор деформируется, приобретая эллипсовидную форму, где R0M, R0Б - малая и большая полуоси деформированного (эллипсовидного) статора после сборки и монтажа силовой установки, а RpM, RрБ - малая и большая полуоси деформированного (эллипсовидного) статора в рабочем режиме.
Изображенный на фиг.1 идеализированный статор (8) представляет собой окружность, вписанную в деформированную оболочку диаметром, равным наименьшему расстоянию между датчиками. Диаметр идеализированной оболочки определяет максимально возможный диаметр колеса ротора, при котором произойдет касание торцов лопастей внутренней поверхности статора.
Торцы лопаток контролируемого колеса ротора ГТД при вращении движутся по окружностям с центром О. Диаметры окружностей, описываемых торцами различных лопаток при наличии радиальных биений (причина биений связана с технологией изготовления колеса), будут отличаться даже при одинаковой длине рабочих лопаток. На фиг.1 также показаны траектории движения торцов лопаток на малых оборотах (9) и в рабочем режиме (10) при отсутствии биений.
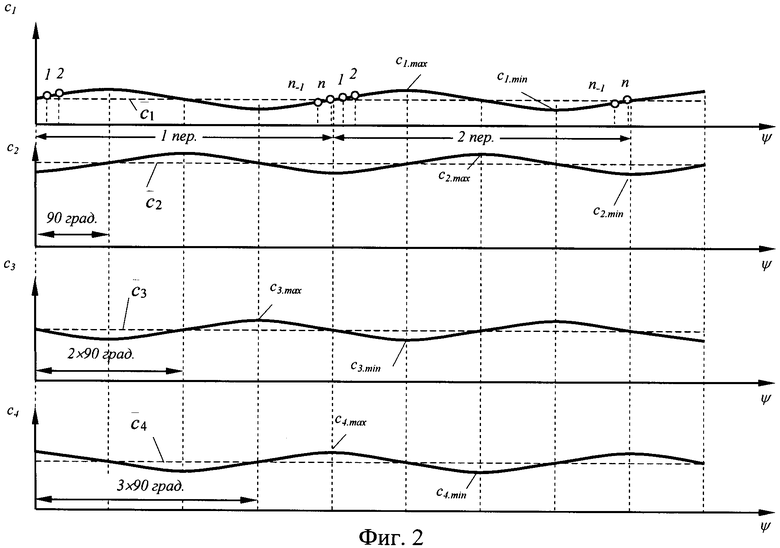
На фиг.2 представлены вызванные биениями колеса ротора колебания зазоров между статором и торцами лопаток в направлении малой и большой оси эллипса (с1(ψ), c2(ψ), c3(ψ), с4(ψ)) на протяжении двух оборотов для всех (nл) лопаток рабочего колеса в условиях отсутствия смещения геометрического центра статора. На той же фигуре для функции c1(ψ) показаны зазоры для лопаток с порядковыми номерами 1, 2 и nл-1, nл на двух периодах вращения (первом и втором). Кроме того, обозначены минимальные (min) и максимальные (max) значения функций с1(ψ), с2(ψ), с3(ψ) и с4(ψ), а также их средние значения.
Амплитуду биений (радиус биений) рабочего колеса ротора оценивают как среднее из половин разностей между максимальным и минимальным значениями РЗ, измеренного относительно геометрического центра выбранного кластера ОВТД в соответствии с выражением:
 j=1, 2, 3, 4,
j=1, 2, 3, 4,
где Δсб - биения колеса ротора, cj,max, cj,min - максимальное и минимальное значения РЗ, измеренные относительно геометрического центра j-го кластера ОВТД.
Ориентацию биения в плоскости вращения контролируемого рабочего колеса (направление смещения геометрического центра колеса относительно его центра вращения) определяют как вектор, проходящий в направлении от лопатки с максимальным значением РЗ к лопатке с минимальным значением РЗ, измеренных относительно геометрического центра любого кластера ОВТД.
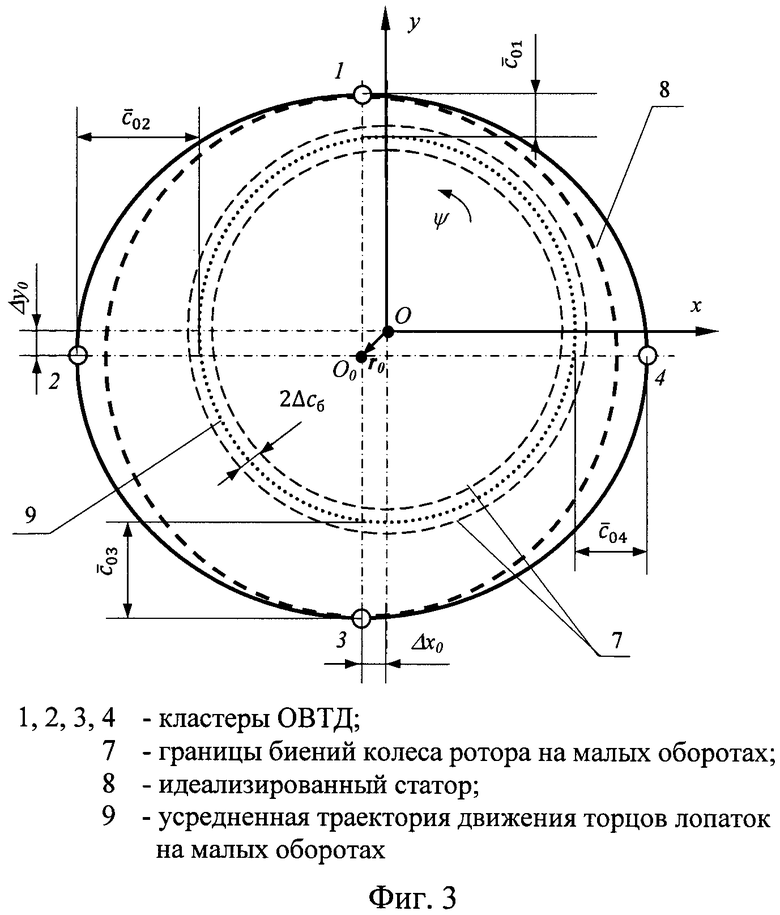
На фиг.3 представлены ДС после сборки и монтажа ГТД в режиме медленного прокручивания ротора на неработающем двигателе при наличии смещения геометрического центра статора в точку О0 относительно центра вращения колеса ротора и начала системы отсчета (где Δx0, Δy0 - координаты смещения геометрического центра статора, а r0 - вектор смещения), а также при наличии биений колеса ротора (на фиг.3 границы биений колеса ротора на малых оборотах обозначены цифрой 7). Здесь же представлен идеализированный статор (8) и показаны усредненная траектория движения торцов лопаток на малых оборотах (9).
Для указанных условий можно записать выражения:
где 

 - средние физические значения зазоров, полученных в результате преобразований сигналов кластеров ОВТД и их последующей обработки.
- средние физические значения зазоров, полученных в результате преобразований сигналов кластеров ОВТД и их последующей обработки.
На основе выражения (1) можно определить координаты смещения геометрического центра статора относительно оси вращения ротора в режиме медленного прокручивания ротора («холодной» прокрутке) на неработающем двигателе, а также величину и направление этого смещения, следующим образом:
где Δx0, Δу0 - координаты смещения геометрического центра статора относительно центра вращения ротора; ||r0|| - модуль радиус-вектора r0, характеризующий величину смещения в режиме «холодной» прокрутки; φ0 - угол, характеризующий направление смещения в режиме «холодной» прокрутки.
При смене рабочих режимов, сопутствующие им изменения параметров рабочих процессов и внешних факторов вызывают изменение ДС, изменение смещения оси ротора, а также изменение размеров деталей рабочего колеса (диска, лопатки и ее замка) под действием температуры рабочего тела (газовоздушного потока) и центробежных сил от вращения ротора. Изменение радиального размера рабочего колеса  зависит от геометрических размеров его деталей (диска, лопатки и ее замка) и физических свойств (параметров) материалов, из которого они выполнены (Рг, Рф), температуры среды, окружающей эти детали (6), и частоты вращения ротора (ωр).
зависит от геометрических размеров его деталей (диска, лопатки и ее замка) и физических свойств (параметров) материалов, из которого они выполнены (Рг, Рф), температуры среды, окружающей эти детали (6), и частоты вращения ротора (ωр).
На фиг.4 представлены деформации статора после сборки и монтажа (5) и в рабочем режиме (6), смещение его геометрического центра, упругая и температурная деформация колеса ротора в рабочем режиме, где Δxp, Δyp - координаты смещения геометрического центра статора, а rp - вектор смещения в рабочем режиме. Чтобы избежать загромождения рисунка, зона траекторий торцов лопаток, связанная с биениями, здесь не показана, а две пунктирные концентрические окружности с центром в точке О, соответствующие осредненным траекториям вращения торцов лопаток на малых оборотах (9) и в рабочем режиме (10), отражают упругую и температурную деформации колеса ротора, имеющего средний по биениям диаметр.
Для указанных условий и в соответствии с фиг.4 справедливо выражение:
где RpM; RрБ - малая и большая полуоси эллипсовидного статора, соответственно; RK - радиус колеса ротора; Δxp, Δyp - координаты смещения геометрического центра статора относительно центра вращения ротора в рабочем режиме;  - среднее изменение радиуса колеса ротора из-за упругой и температурной деформации;
- среднее изменение радиуса колеса ротора из-за упругой и температурной деформации;  ,
,  ,
,  ,
,  - средние физические значения РЗ, полученных в результате преобразований сигналов датчиков и их последующей обработки в рабочем режиме.
- средние физические значения РЗ, полученных в результате преобразований сигналов датчиков и их последующей обработки в рабочем режиме.
В соответствии с фиг.1:

где  ,
, 
С учетом (4) выражение (3) можно представить в виде:
 Из выражений (1) следует, что
Из выражений (1) следует, что

С учетом (6) выражение (5) примет вид:
где  ,
,  ,
,  ,
,  .
.
Искомые деформации статора ГТД в рабочем режиме ( ,
,  ) определяют на основе выражения (7). Для этого должны быть известны изменения зазоров
) определяют на основе выражения (7). Для этого должны быть известны изменения зазоров  ,
,  ,
,  ,
,  , изменение радиального размера контролируемого рабочего колеса ротора
, изменение радиального размера контролируемого рабочего колеса ротора  , а также координаты смещения геометрического центра статора после сборки и монтажа двигателя (Δx0, Δy0) и в рабочем режиме (Δxp, Δyp).
, а также координаты смещения геометрического центра статора после сборки и монтажа двигателя (Δx0, Δy0) и в рабочем режиме (Δxp, Δyp).
Параметры  ,
,  ,
,  ,
,  определяют по результатам измерения РЗ между датчиками и лопатками контролируемого колеса ротора в режиме медленного прокручивания ротора («холодной» прокрутки) на неработающем двигателе и в рабочем режиме ГТД известным способом, предполагающим совокупную обработку сигналов кластера ОВТД на основе экспериментальных градуировочных характеристик измерительных каналов, в которые включены ЧЭ датчиков.
определяют по результатам измерения РЗ между датчиками и лопатками контролируемого колеса ротора в режиме медленного прокручивания ротора («холодной» прокрутки) на неработающем двигателе и в рабочем режиме ГТД известным способом, предполагающим совокупную обработку сигналов кластера ОВТД на основе экспериментальных градуировочных характеристик измерительных каналов, в которые включены ЧЭ датчиков.
Параметр  определяют с помощью одной из известных моделей вида
определяют с помощью одной из известных моделей вида  , задавая соответствующие значения параметров деталей рабочего колеса (диска, лопатки и ее замка) Рг, Рф и используя текущие значения θ и ωр, получаемые в ходе эксперимента (на фиг.1, 3, 4 датчики температуры и частоты вращения не показаны) [Кузнецов Н.Д., Данильченко В.П., Резник В.Е. Управление радиальными зазорами в турбокомпрессорах авиационных ГТД. - Самара; САИ, 1991. - 108 с.].
, задавая соответствующие значения параметров деталей рабочего колеса (диска, лопатки и ее замка) Рг, Рф и используя текущие значения θ и ωр, получаемые в ходе эксперимента (на фиг.1, 3, 4 датчики температуры и частоты вращения не показаны) [Кузнецов Н.Д., Данильченко В.П., Резник В.Е. Управление радиальными зазорами в турбокомпрессорах авиационных ГТД. - Самара; САИ, 1991. - 108 с.].
Координаты смещений Δx0, Δy0 определяют с помощью выражений (2), а координаты смещений Δxp, Δyp находят из выражений:


где Δxp, Δyр - координаты смещения геометрического центра статора относительно центра вращения ротора в рабочем режиме ГТД; ||rp|| - модуль радиус-вектора rp, характеризующий величину смещения геометрического центра статора в рабочем режиме; φp - угол, характеризующий направление смещения в рабочем режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОГО ЗАЗОРА МЕЖДУ ТОРЦАМИ РАБОЧИХ ЛОПАТОК И СТАТОРОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2648284C2 |
| ВИХРЕТОКОВЫЙ ДАТЧИК СО СМЕЩЕННЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2021 |
|
RU2778031C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ РАБОЧИХ ЛОПАТОК ТУРБИНЫ | 2013 |
|
RU2556297C2 |
| СПОСОБ УСКОРЕННОГО ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2010 |
|
RU2454626C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ МЕЖДУ ТОРЦАМИ ЛОПАТОК РАБОЧЕГО КОЛЕСА И СТАТОРНОЙ ОБОЛОЧКОЙ ТУРБОМАШИНЫ | 2014 |
|
RU2587644C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ТУРБИНЫ | 2010 |
|
RU2457432C1 |
| СПОСОБ ОБНАРУЖЕНИЯ КРУТИЛЬНЫХ И ИЗГИБНЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ОСЕВОГО КОМПРЕССОРА ПРИ ИССЛЕДОВАНИЯХ СРЫВНЫХ ЯВЛЕНИЙ | 2006 |
|
RU2320957C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора или турбины двухконтурного газотурбинного двигателя | 2018 |
|
RU2684073C1 |
| Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора или турбины газотурбинного двигателя | 2018 |
|
RU2691000C1 |

Изобретение относится к измерительной технике и может быть использовано для оценки деформации статора газотурбинного двигателя. Техническим результатом является обнаружение и количественная оценка деформации элементов конструкции ГТД в рабочем режиме в зоне установки кластерных вихретоковых датчиков зазора. Способ оценки деформации статора и параметров биения ротора газотурбинного двигателя заключается в том, что с торцами рабочих лопаток вводят во взаимодействие четыре кластера одновитковых вихретоковых датчика зазора. Кластеры датчиков размещают на статоре по осям прямоугольной системы координат, центр которой совмещают с центром вращения контролируемого рабочего колеса, торцы датчиков с чувствительными элементами располагают на уровне внутренней поверхности статора в зоне взаимодействия электромагнитного поля каждого чувствительного элемента датчика с торцами лопаток рабочего колеса; деформацию статора по осям координат, размер и направление смещения геометрического центра статора относительно центра вращения рабочего колеса оценивают путем совместной обработки результатов измерения радиального зазора между торцом каждой лопатки относительно геометрического центра каждого кластера датчиков и численного моделирования упругих и тепловых деформаций элементов конструкции рабочего колеса - диска, лопатки и ее замка. Амплитуду биений (радиус биений) рабочего колеса оценивают по положениям и размерам максимальных и минимальных значений радиального зазора, измеренного относительно любого датчика. 3 з.п. ф-лы, 4 ил.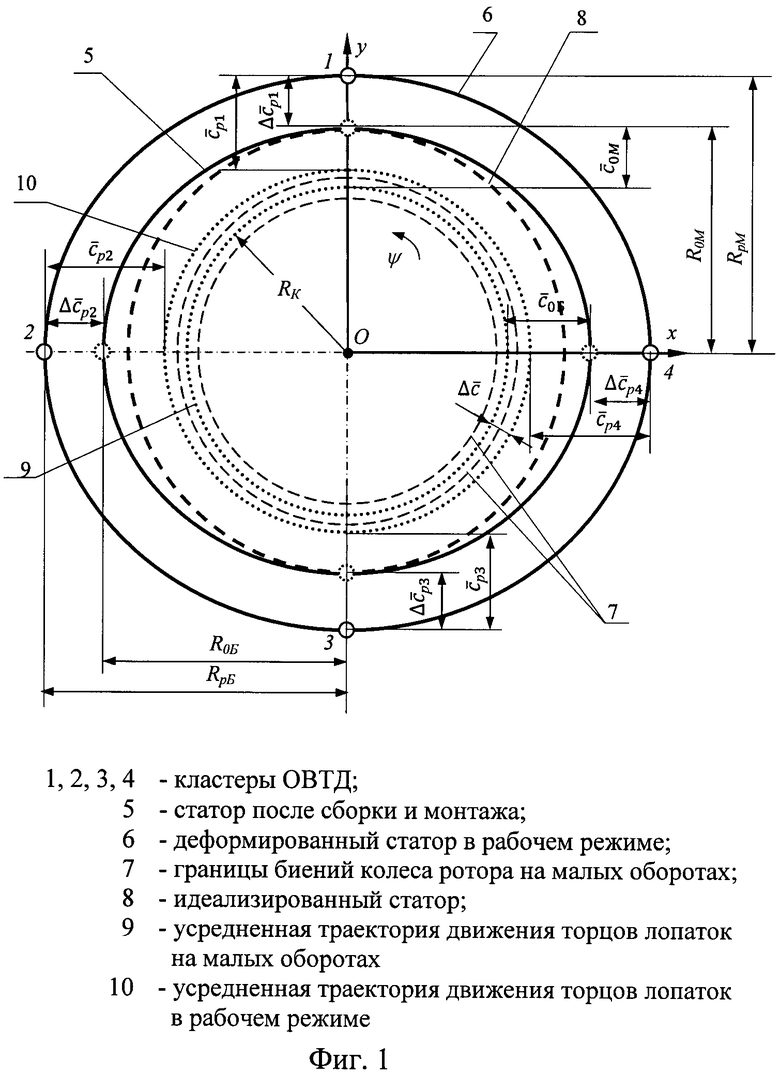
1. Способ оценки деформации статора и параметров биения ротора газотурбинного двигателя (ГТД), заключающийся в том, что с торцами рабочих лопаток вводят во взаимодействие четыре кластера одновитковых вихретоковых датчиков зазора; кластеры датчиков размещают на статоре по осям прямоугольной системы координат, центр которой совмещают с центром вращения контролируемого рабочего колеса, торцы датчиков с чувствительными элементами располагают на уровне внутренней поверхности статора в зоне взаимодействия электромагнитного поля каждого чувствительного элемента датчика с торцами лопаток рабочего колеса; деформацию статора по осям координат, размер и направление смещения геометрического центра статора относительно центра вращения рабочего колеса оценивают путем совместной обработки результатов измерения радиального зазора между торцом каждой лопатки относительно геометрического центра каждого кластера датчиков и численного моделирования упругих и тепловых деформаций элементов конструкции рабочего колеса - диска, лопатки и ее замка; амплитуду биений (радиус биений) рабочего колеса оценивают по положениям и размерам максимальных и минимальных значений радиального зазора, измеренного относительно любого датчика.
2. Способ по п.1, отличающийся тем, что амплитуду биений (радиус биений) рабочего колеса ротора определяют как половину разности между максимальным и минимальным значениями радиального зазора, измеренного относительно выбранного кластера датчиков в соответствии с выражением
 , j=1, 2, 3, 4,
, j=1, 2, 3, 4,
где Δсб - биения колеса ротора, Cj,max, Cj,min - максимальное и минимальное значения зазора, измеренные относительно геометрического центра j-го кластера одновитковых вихретоковых датчиков в плоскости вращения контролируемого рабочего колеса, а ориентацию биения (направление смещения геометрического центра колеса относительно его центра вращения) определяют как вектор, проходящий в направлении от лопатки с максимальным значением радиального зазора к лопатке с минимальным значением радиального зазора, измеренных относительно геометрического центра выбранного кластера датчиков.
3. Способ по п.1, отличающийся тем, что составляющие смещения геометрического центра статора относительно оси вращения ротора по осям координат определяют как разность половин средних значений зазоров, измеренных относительно геометрических центров кластеров датчиков, расположенных попарно на положительном и отрицательном направлениях каждой оси координат в соответствии с выражениями

где Δx, Δy - координаты смещения геометрического центра статора относительно центра вращения ротора в выбранном режиме работы ГТД;
 - средние значения зазоров, полученных в результате преобразований сигналов кластера одновитковых вихретоковых датчиков и их последующей обработки; nл - число лопаток на контролируемом колесе ротора; |r| - модуль радиус-вектора r, характеризующий величину смещения геометрического центра статора в выбранном режиме, а направление смещения геометрического центра статора относительно оси X определяют как обратную тангенсальную функцию отношения смещения по оси Х к смещению по оси Y в соответствии с выражением φ=arctg(Δx/Δy),
- средние значения зазоров, полученных в результате преобразований сигналов кластера одновитковых вихретоковых датчиков и их последующей обработки; nл - число лопаток на контролируемом колесе ротора; |r| - модуль радиус-вектора r, характеризующий величину смещения геометрического центра статора в выбранном режиме, а направление смещения геометрического центра статора относительно оси X определяют как обратную тангенсальную функцию отношения смещения по оси Х к смещению по оси Y в соответствии с выражением φ=arctg(Δx/Δy),
где φ - угол, характеризующий направление смещения геометрического центра статора относительно оси Х в выбранном режиме работы ГТД.
4. Способ по п.1, отличающийся тем, что деформацию статора по осям координат на заданном режиме работы ГТД определяют состоящей из измеренных с помощью кластеров одновитковых вихретоковых датчиков изменений средних по всем лопаткам контролируемого рабочего колеса значений радиального зазора, определенных смещений геометрического центра статора после сборки и монтажа, а также на заданном рабочем режиме работы ГТД, рассчитанного по модели суммарного изменения радиального размера рабочего колеса в рабочем режиме под действием упругой деформации и теплового расширения, и рассчитывают в соответствии с выражениями


где 
 - деформация статора в рабочем режиме в направлении малой и большой оси эллипса, соответственно;
- деформация статора в рабочем режиме в направлении малой и большой оси эллипса, соответственно; 

 - изменения средних по всем лопаткам контролируемого рабочего колеса значений радиального зазора, которые измеряют на заданном рабочем режиме с помощью 1, 2, 3, 4 кластерного одновиткового вихретокового датчика, соответственно; Δx0, Δy0 - координаты смещения геометрического центра статора после сборки и монтажа ГТД; Δxp, Δyp - координаты смещения геометрического центра статора на заданном рабочем режиме работы ГТД;
- изменения средних по всем лопаткам контролируемого рабочего колеса значений радиального зазора, которые измеряют на заданном рабочем режиме с помощью 1, 2, 3, 4 кластерного одновиткового вихретокового датчика, соответственно; Δx0, Δy0 - координаты смещения геометрического центра статора после сборки и монтажа ГТД; Δxp, Δyp - координаты смещения геометрического центра статора на заданном рабочем режиме работы ГТД;  - суммарное изменение радиального размера рабочего колеса в рабочем режиме под действием упругой деформации и теплового расширения, которое определяют по известным моделям вида
- суммарное изменение радиального размера рабочего колеса в рабочем режиме под действием упругой деформации и теплового расширения, которое определяют по известным моделям вида  для чего задают соответствующие значения геометрических параметров деталей рабочего колеса - диска, лопатки и ее замка, (Рг), физические параметры материала диска, лопатки и ее замка (Рф), а значения частоты вращения ротора ωр и температуры воздушного потока θ, обтекающего диск, лопатку и замок лопатки, измеряют регулярно в ходе эксперимента.
для чего задают соответствующие значения геометрических параметров деталей рабочего колеса - диска, лопатки и ее замка, (Рг), физические параметры материала диска, лопатки и ее замка (Рф), а значения частоты вращения ротора ωр и температуры воздушного потока θ, обтекающего диск, лопатку и замок лопатки, измеряют регулярно в ходе эксперимента.
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 1996 |
|
RU2138012C1 |
| Способ измерения радиальных зазоров в турбомашинах | 1990 |
|
SU1779908A1 |
| US 4987555 A, 22.01.1991. | |||

