Область техники
Изобретение относится к устройству управления рулевым управлением и к способу управления рулевым управлением для транспортного средства, в котором предусмотрено устройство с электрическим усилителем руля, такое как усилитель руля с электронным управлением (УРЭУ).
Уровень техники
В публикации заявки на патент Японии № 6-211142 (JP 6-211142 А), например, предложен один тип устройства с электрическим усилителем руля, в котором учитывается противоэлектродвижущая сила электродвигателя. Устройство с электрическим усилителем руля, описанное в JP 6-211142 (ниже называется "предшествующим уровнем техники"), обеспечивает хорошее ощущение рулевого управления, получаемое в результате расчета противоэлектродвижущей силы электродвигателя на основе детектируемой скорости вращения электродвигателя и коррекции прикладываемого напряжения к электродвигателю на основе рассчитанной противоэлектродвижущей силы.
Кроме того, например, в публикации заявки на патент Японии № 2007-118785 (JP 2007-118785 А) также предложена технология для предотвращения ухудшения ощущения рулевого управления водителем путем коррекции целевого тока оси q при выполнении управления с ослаблением поля электродвигателя.
На напряжение приведения двигателя влияют физические или электрические ограничения со стороны двигателя, спецификации (такие как номинальное значение) подаваемого питания, такого как аккумулятор, или состояние заряда источника питания, которое может изменяться от случая к случаю и, таким образом, имеет фиксированное или переменное значение верхнего предела. Поэтому даже если приложенное напряжение (которое представляет собой одну форму напряжения приведения в данном случае) корректируют, просто учитывая противоэлектродвижущую силу как в предшествующем уровне техники, приложенное напряжение будет ограничено верхним предельным значением и поэтому может быть недостаточным для компенсации противоэлектродвижущей силы.
В этом случае противоэлектродвижущая сила может превысить приложенное напряжение, так что двигатель переходит в состояние генерирования энергии. В результате двигатель может перейти в так называемое состояние обратного усиления, в котором направление усиления двигателя имеет обратное направление относительно направления, в котором первоначально требовалось усиление. Таким образом, в предшествующем уровне техники существует технический недостаток, состоящий в том, что операция при выполнении рулевого управления водителем может быть затруднена, когда напряжение приведения двигателя ограничено верхним предельным значением.
Краткое описание изобретения
Таким образом, учитывая описанную выше проблему, согласно настоящему изобретению предусмотрено устройство управления рулевым управлением транспортного средства и способ управления рулевым управлением, выполненное с возможностью подавления ухудшения управления, когда установлено верхнее предельное значение для напряжения приведения двигателя.
Поэтому первый аспект изобретения относится к устройству управления рулевым управлением для транспортного средства, в котором предусмотрено устройство рулевого управления с электрическим усилителем, имеющее двигатель, выполненный с возможностью приложения силы усиления рулевого управления к валу руля, и устройство привода, выполненное с возможностью привода двигателя путем подачи напряжения приведения в двигатель. Устройство управления рулевым управлением включает в себя первое устройство управления, устройство определения и второе устройство управления. Первое устройство управления управляет устройством привода таким образом, что напряжение приведения, когда оно равно или меньше, чем заданное верхнее предельное напряжение, для приложения силы усиления рулевого управления, которая основана на величине рулевого управления заданного вида, к валу руля. Устройство определения определяет, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, на основе скорости вращения двигателя и подаваемого напряжения приведения. Второе устройство управления управляет устройством привода для уменьшения величины энергии, генерируемой двигателем, когда определяют, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии.
Второй аспект изобретения относится к способу управления рулевым управлением для транспортного средства, в котором предусмотрено устройство рулевого управления с электрическим усилителем, имеющее двигатель, выполненный с возможностью приложения силы усиления рулевого управления к валу руля, и устройство привода, выполненное с возможностью привода двигателя путем подачи напряжения приведения к двигателю. Такой способ управления рулевым управлением включает этапы, на которых i) управляют устройством привода таким образом, что напряжение приведения подают равным или меньше, чем заданное верхнее предельное напряжение, для приложения силы усиления рулевого управления, которая основана на величине рулевого управления заданного вида, к валу руля, ii) определяют, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, на основе скорости вращения двигателя и подаваемого напряжения приведения, и iii) управляют устройством привода для уменьшения количества энергии, генерируемой двигателем, когда определяют, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии.
Сила усиления рулевого управления в настоящем изобретении включает в себя физическую, механическую, электрическую и магнитную силу или тому подобное, которую прикладывают к рулевому колесу через вал руля (включающий в себя вал руля, вал рулевой колонки, вал с шестерней или любой из различных типов элементов вала, предусмотренных в любом из различных типов механизмов рулевого управления, таких как механизм управления типа реечной передачи или механизм управления типа с винтом и шариковой гайкой) в ответ на операцию рулевого управления, выполняемую водителем, и которую прикладывают к валу руля для того, чтобы усилить силу, которая представляет собой физическую силу, используемую для поворота управляемых рулем колес влево или вправо относительно транспортного средства.
В это время с учетом того факта, что вал руля включает в себя различные валы, описанные выше, способ, с помощью которого сила усиления рулевого управления будет передана к валу руля, и положение, в котором расположен двигатель в соответствии с изобретением, который прикладывает силу усиления рулевого управления к валу руля и который может представлять собой, например, бесщеточный двигатель постоянного тока, не ограничено существенными ограничениями (если такие ограничения существуют), на основе, по меньшей мере, места установки, стоимости, долговечности или надежности и т.п.
Устройство привода в соответствии с изобретением включает в себя физическое, механическое, конструктивное, электрическое, магнитное и химическое средство, выполненное с возможностью приведения двигателя в соответствии с изобретением, путем прямой или опосредованной передачи напряжения приведения к двигателю. Например, устройство привода может соответствующим образом включать в себя различные составляющие элементы в соответствии с его конструкцией, например источник питания, такой как аккумулятор, материал обмотки, который формирует контур подачи питания от источника питания к двигателю, устройство переключения, такое как релейная схема, различные усилительные устройства, такие как полевой транзистор (FET), выпрямитель, такой как обратный преобразователь, и схема широтно-импульсной модуляции (PWM) и т.п. В частности, фраза "опосредованная подача напряжения приведения” может относиться к подаче напряжения приведения в виде трехфазного напряжения через процесс трехфазного преобразования, например, или к подаче напряжения приведения в виде импульсного напряжения, которое основано на коэффициенте заполнения в соответствии с управлением PWM или тому подобное.
В устройстве управления рулевым управлением и в способе управления рулевым управлением транспортного средства в соответствии с изобретением, в то время как операцией устройства привода управляют для подачи напряжения приведения в двигатель, используя первое устройство управления, которое может принимать форму любой из различных компьютерных систем, таких как различные контроллеры или микрокомпьютеры, или любые из множества модулей обработки, таких как электронный управляющий модуль (ЭУМ) или тому подобное. Такое напряжение приведения представляет собой напряжение для подачи силы усиления рулевого управления, которая основана на величине рулевого управления заданного вида, прикладываемой к валу руля (то есть целевое значение для силы усиления рулевого управления, ниже называемое “целевая сила усиления рулевого управления” в соответствующих случаях), и управляющее напряжение двигателя, подаваемое к двигателю, без изменения. Такое напряжение приведения фактически отличается от напряжения, подаваемого для привода двигателя, на который влияет противоэлектродвижущая сила, которая будет описана ниже. Это напряжение приведения установлено так, чтобы оно было равным или меньше, чем заданное верхнее предельное напряжение (в частности, фраза "равным или меньше, чем” может просто быть заменена “меньше чем”, в зависимости от установки верхнего предельного напряжения. Вопрос, состоящий в том, в какой диапазон включено значение, которое определяет верхнее предельное напряжение, представляет собой конструктивный вопрос и не относится к сущности изобретения).
Здесь величина рулевого управления заданного вида включает в себя любые из различных физических величин или величин управления, которые коррелируют с операцией рулевого управления, выполняемой водителем, а также значения индекса, которые определяют эти физические количества или величины управления. Например, “величина рулевого управления заданного вида” может представлять собой крутящий момент рулевого управления, прикладываемый через рулевое колесо, угол поворота рулевого колеса во время рулевого управления или угловая скорость при рулевом управлении, получаемая путем получения дифференциала по времени угла поворота рулевого колеса при рулевом управлении.
Кроме того, верхнее предельное напряжение относится, например, к теоретическому или реально верхнему предельному значению, которое определено конфигурацией или конструкцией двигателя или устройства привода, или тому подобное, или к верхнему предельному значению, которое установлено заранее для обеспечения физической, механической, электрической, химической или магнитной долговечности или надежности источника питания (например, любого из множества устройств накопления энергии, таких как аккумулятор), двигателя или устройства привода, в соответствии с конфигурацией или структурой источника питания, на основе испытаний, опыта, теории или моделирования, или тому подобное, или в пределах диапазона, в котором подача питания в другое оборудование, которое использует этот источник питания, не будет нарушена.
В частности, напряжение здесь относится к разности электрических потенциалов относительно опорного электрического потенциала и может быть либо положительным, или отрицательным. Поэтому, строго говоря, термин "верхнее предельное напряжение" представляет собой пороговое значение, когда существует положительная разность электрического потенциала. Когда существует отрицательная разность электрических потенциалов (например, один предпочтительный режим представляет собой режим, когда направление рулевого управления транспортного средства отличается по сравнению со случаем, когда существует положительная разность электрического потенциала), это пороговое значение может стать нижним предельным значением. Однако термин “верхнее предельное значение” в соответствии с изобретением, включает в себя верхнее предельное значение абсолютной разности электрических потенциалов, когда такой вид полярности является не относящимся к делу.
В то же время двигатель вращается пассивно от вращения вала руля в ответ на операцию рулевого управления, выполняемую водителем. В результате, генерируется противоэлектродвижущая сила в соответствии с этой скоростью вращения (ниже называется “скоростью вращения двигателя” в соответствующих случаях). Такая противоэлектродвижущая сила действует в направлении, которое направлено противоположно напряжению приведения, подаваемому к двигателю, в связи с чем ток привода двигателя уменьшается в результате такого типа противоэлектродвижущей силы, что, в свою очередь, уменьшает силу усиления рулевого управления, прикладываемую от двигателя к валу руля. В частности, ток привода может принимать разные формы в соответствии с физической, механической, электрической или магнитной структурой, или тому подобное, например двигателя или устройства привода. Например, когда выполняют так называемое векторное управление, ток привода может представлять собой ток оси d или ток оси q, установленный на модели осей d-q, в которой ось d установлена в направлении пары магнитных полюсов ротора, и ось q установлена в направлении, перпендикулярном оси d. В качестве альтернативы эти токи могут быть преобразованы в трехфазный ток, то есть в ток фазы u, ток фазы v и ток фазы w путем преобразования фиксированных координат статора.
С другой стороны, с учетом операции первого устройства управления, когда сила усиления рулевого управления уменьшается в результате действия такого рода противоэлектродвижущей силы, можно увеличить напряжение приведения для компенсации уменьшения тока привода, используя различное управление с обратной связью, такое как ПИ управление (пропорционально-интегральное) или ПИД управление (пропорционально-интегрально-дифференциальное), или тому подобное. В идеале, даже если генерируется противоэлектродвижущая сила, на практике возможно поддерживать силу усиления рулевого управления на значении, которое эквивалентно целевой силе усиления рулевого управления или, по меньшей мере, на значении, которое можно рассматривать эквивалентным целевой силе усиления рулевого управления.
В частности, как описано выше, напряжение приведения имеет верхнее предельное напряжение, установленное заранее, или установленное отдельно и, в частности, на основе от случая к случаю, в соответствии с нагрузкой на аккумулятор или состояние заряда аккумулятора или тому подобное. Поэтому даже если напряжение приведения будет увеличено, при увеличении противоэлектродвижущей силы оно, в конечном итоге, становится насыщенным и сила усиления рулевого управления уменьшится.
Поэтому в зависимости от скорости вращения двигателя противоэлектродвижущая сила может превысить напряжение приведения, приводя к обратной полярности приложенного напряжения двигателя. Если такое случается, состояние привода двигателя переключается из состояния усиления руля в состояние генерирования энергии, и направление, в котором прикладывается сила усиления рулевого управления, становится противоположным первоначальному направлению (такой вид состояния устройства электрического усилителя руля называется “обратным состоянием усиления” или тому подобное в соответствующих случаях). В обратном состоянии усиления сила усиления рулевого управления прикладывается в направлении, которое препятствует операции рулевого управления, выполняемой водителем, и, в результате, операция рулевого управления, выполняемая водителем, существенно затрудняется. Таким образом, когда двигатель находится в состоянии генерирования энергии, существенно ухудшаются возможности управления транспортным средством.
Поэтому в соответствии с устройством управления рулевым управлением и способом управления рулевым управлением для транспортного средства в соответствии с изобретением во время работы устройство определения, которое может принимать форму любой из множества компьютерных систем, таких как различные контроллеры или микрокомпьютеры, или любой один из различных модулей обработки, таких как ЭУМ (электронный управляющий модуль), или тому подобное, определяет, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, на основе скорости вращения двигателя и напряжения приведения.
Здесь состояние, которое соответствует состоянию генерирования энергии, включает в себя, по меньшей мере, состояние генерирования энергии, и также предпочтительно состояние, в котором прогнозируется или оценивается (то есть прогнозируемое состояние генерирования энергии) с известной точностью, с которой на практике не возникает, по меньшей мере, какая-либо существенная проблема, что двигатель скоро (например, через фиксированный или переменный установленный ограниченный период времени) перейдет в состояние генерирования энергии. Поэтому не является абсолютно необходимым, чтобы двигатель фактически находился в состоянии генерирования энергии в момент, когда определяют с помощью устройства определения, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии. Другими словами, концепция определения, относящаяся к устройству определения, также может включать в себя неопределенные концепции прогнозирования, предположения и оценки и т.п.
Как описано выше, существует корреляция, которая может быть линейной, нелинейной или насыщенной, или ненасыщенной в заданной точке между скоростью вращения двигателя и генерируемой противоэлектродвижущей силой. Определение может быть выполнено с такой точностью, что на практике не возникнет, по меньшей мере, какая-либо существенная проблема на основе скорости вращения двигателя и напряжения приведения. Кроме того, предпочтительно, как скорость вращения двигателя, так и напряжение приведения представляют собой величины управления, которые обычно отслеживают в устройствах рулевого управления с электрическим усилителем, и устройство определения выполнено с возможностью быстрого получения этих данных.
В частности, можно использовать любой один из множества отдельных и специфичных режимов определения, которые основаны на скорости вращения двигателя и напряжении привода. В одном предпочтительном режиме даже при том, что определение, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, на которое, в конечном итоге, влияет верхнее предельное напряжение устройства привода, когда первое устройство управления увеличивает напряжение приведения для поддержания силы усиления рулевого управления на целевом значении силы усиления рулевого управления, верхнее предельное напряжение не всегда требуется определять, поскольку режим управления первого устройства управления может быть любым из различных режимов.
В то же время при использовании устройства управления рулевым управлением и способа управления рулевым управлением для транспортного средства в соответствии с изобретением, во время работы второе устройство управления, которое может быть выполнено в любой из различных компьютерных систем, таких как различные контроллеры или микрокомпьютеры, или любом одном из различных модулей обработки, таких как ЭУМ (электронный управляющий модуль), или тому подобное, управляет устройством привода в соответствии с результатами определения, полученными из устройства определения. Более конкретно, второе устройство управления управляет устройством привода для уменьшения количества энергии, генерируемой двигателем, когда определяют, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии.
Здесь режим управления, когда второе устройство управления уменьшает количество энергии, генерируемой двигателем, не ограничено чем-либо конкретно, если только количество энергии, генерируемой двигателем, может быть уменьшено, по меньшей мере, в степени, когда уменьшение возможности управления транспортным средством может быть в значительной степени подавлено. Например, второе устройство управления может управлять устройством привода таким образом, что количество генерируемой энергии уменьшается до нуля, или оно может управлять устройством привода так, что количество генерируемой энергии уменьшается на минимальный шаг перемещения, который установлен заранее, или который может быть установлен отдельно и, в частности, на основе от случая к случаю. Кроме того, в это время второе устройство управления может уменьшить количество энергии, генерируемой на двух этапах, с последовательным приращением (то есть за множество этапов), или непрерывно (то есть бесшаговым способом). В частности, не всегда необходимо отслеживать количество энергии, фактически генерируемой при управлении вторым устройством управления, для уменьшения количества генерируемой энергии.
Таким образом, с устройством управления рулевым управлением и в соответствии со способом управления рулевым управлением для транспортного средства, в соответствии с изобретением, можно быстро и точно определять, находится ли двигатель в состоянии генерирования энергии или перейдет ли двигатель скоро в состояние генерирования энергии. Кроме того, когда двигатель находится в состоянии генерирования энергии или когда прогнозируют или оценивают, что двигатель скоро перейдет в состояние генерирования энергии, количество энергии, генерируемой двигателем, может быть уменьшено. Таким образом, количество энергии, генерируемой двигателем, представляет собой силу усиления рулевого управления, которая имеет направление, противоположное нормальному направлению (ниже называется “обратной силой усиления рулевого управления”, когда это необходимо), которую двигатель прикладывает к валу руля. Уменьшение количества энергии, генерируемой двигателем, уменьшает обратную силу усиления рулевого управления, которая воздействует в направлении, противоположном направлению, требуемом водителю. В результате, можно в значительной степени подавить ухудшение ощущения рулевого управления транспортным средством, по меньшей мере, по сравнению со случаем, когда такой тип управления не выполняют.
Кроме того, в устройстве управления рулевым управлением и в способе управления рулевым управлением, описанных выше, можно определять, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, путем сравнения i) верхней предельной скорости вращения, которая определяет верхний предел абсолютного значения скорости вращения двигателя, выполненного с возможностью приложения силы усиления рулевого управления, и которая установлена на основе подаваемого напряжения приведения с ii) абсолютным значением скорости вращения двигателя.
В соответствии с устройством управления рулевым управлением и способом управления рулевым управлением, описанными выше, определение, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, выполняют на основе сравнения между скоростью вращения двигателя и верхней предельной скоростью вращения (один предпочтительный режим включает в себя определение, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии, когда скорость вращения двигателя больше, чем верхняя предельная скорость вращения (в этом случае “больше чем” может легко заменить на “равна или больше чем”, в зависимости от установки верхнего предельного напряжения. Вопрос, в какой диапазон включено значение, которое определяет верхнюю предельную скорость вращения, представляет собой предмет конструкции и не имеет отношения к сущности изобретения)), таким образом, определение может быть выполнено просто и точно.
В частности, выражение "абсолютное значение" используется с учетом случая, в котором направление вращения двигателя обозначено знаком "плюс" или знаком "минус", который соответствует направлению рулевого управления транспортным средством (то есть если не используется абсолютное значение, тогда, строго говоря (хотя не имеет отношения к соответственной части изобретения), этот тип значения относительно отрицательного направления вращения может представлять собой нижнее предельное значение вместо верхнего предельного значения).
Кроме того, в устройстве управления рулевым управлением и в способе управления рулевым управлением, описанными выше, устройством привода можно управлять таким образом, что подачу напряжения приведения прерывают, когда определяют, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии.
В соответствии с устройством управления рулевым управлением и способом управления рулевым управлением, описанными выше, когда двигатель, например, находится в состоянии, которое соответствует состоянию генерирования энергии, подачу напряжения приведения прерывают, выполняя такие этапы, как размыкание реле двигателя, когда цепь реле такого типа предусмотрена, как составляющий элемент устройства привода. Соответственно, становится возможным легко уменьшить количество генерируемой энергии до нуля (то есть двигатель может быть переведен в состояние, в котором он представляет собой не более чем физическую нагрузку, поскольку не подают ток). Таким образом, обратную силу усиления рулевого управления можно легко уменьшить до нуля.
Кроме того, в устройстве управления рулевым управлением и в способе управления рулевым управлением, описанным выше, сила усиления рулевого управления может быть постепенно изменена до целевого значения, когда состояние двигателя изменяется с состояния генерирования энергии в возможное состояние усиления, которое соответствует другому состоянию, кроме состояния генерирования энергии.
В соответствии с устройством управления рулевым управлением и способом управления рулевым управлением, описанными выше, когда двигатель переходит (то есть возвращается) из состояния генерирования энергии (или, по меньшей мере, части состояния, которое соответствует состоянию генерирования энергии) в состояние возможного усиления (состояние, которое соответствует другому, состоянию, кроме состояния генерирования энергии, то есть состояние, которое позволяет прикладывать силу усиления рулевого управления в нормальном направлении), сила усиления рулевого управления постепенно изменяется до целевого значения с различными характеристиками изменения, которые являются характеристиками последовательного приращения (то есть множество шагов) или непрерывными характеристиками (то есть в виде бесшаговой характеристики), или линейно, или нелинейно. Поэтому можно предотвратить возникновение ситуации, в которой, например, ухудшается возможность управления транспортным средством (например, рулевое колесо внезапно ощущается более легким в ответ на операцию рулевого управления) из-за резкого увеличения силы усиления рулевого управления, когда двигатель переходит в состояние возможного усиления. В результате, можно обеспечить хорошее управление.
В частности, в устройстве управления рулевым управлением и в способе управления рулевым управлением, описанных выше, устройством привода можно управлять таким образом, что исходное значение, при постепенном изменении силы усиления рулевого управления становится равным нулю, когда состояние двигателя изменяется из состояния генерирования энергии на состояние возможного усиления.
В соответствии с устройством управления рулевым управлением и способом управления рулевым управлением, описанными выше, исходное значение, когда возвращается сила усиления рулевого управления (то есть начинает постепенно изменяться), становится равным нулю, что является предпочтительным для подавления как можно быстрее странного ощущения, возникающего когда начинает прикладываться сила усиления рулевого управления.
Затем, в устройстве управления рулевым управлением и в способе управления рулевым управлением, описанных выше, транспортное средство также может иметь, по меньшей мере, устройство рулевого управления с переменным передаточным числом, которое выполнено с возможностью изменения передаточного числа рулевого управления, то есть соотношения между входным углом рулевого управления и выходным углом рулевого управления, прикладываемым на стороне перед двигателем. Кроме того, в устройстве управления рулевым управлением и в способе управления рулевым управлении для транспортного средства, описанных выше, устройством рулевого управления с переменным передаточным числом можно управлять для изменения передаточного числа рулевого управления в соответствии с величиной рулевого управления и диапазоном управления передаточным числом рулевого управления можно управлять в соответствии со скоростью вращения двигателя, когда определяют, что двигатель не находится в состоянии, которое соответствует состоянию генерирования энергии.
В соответствии с устройством управления рулевым управлением и способом управления рулевым управлением, описанными выше, в транспортном средстве предусмотрено устройство с переменным передаточным числом рулевого управления, таким как рулевое управление с переменным передаточным числом (РУППЧ), например (в частности, та же функция, как и в устройстве рулевого управления с переменным передаточным числом также может быть встроена в устройство рулевого управления с электрическим усилителем). Например, передаточное число рулевого управления, которое представляет собой отношение угла поворота рулевого управления, определяемого операцией с рулевым колесом (также называемого “входным углом рулевого управления”), к фактическому углу рулевого управления управляемых колес (также называемым “выходным углом рулевого управления”) управляют для изменения за два этапа, с последовательным приращением (то есть за множество этапов), или непрерывно (бесшаговым способом) с заранее установленным диапазоном управления, например, в соответствии с величиной рулевого управления, описанной выше, с использованием третьего устройства управления, которое может быть выполнено в форме любой из различных компьютерных систем, таких как различные контроллеры или микрокомпьютеры, или любого одного из различных модулей обработки, таких как ЭУМ.
С одной стороны, устройство рулевого управления с переменным передаточным числом имеет структуру, которая, по меньшей мере, включает в себя, например, любой из различных механизмов редукторов и двигатель (ниже называется двигателем “стороны рулевого управления с переменным передаточным числом (РУППЧ)” в соответствующих случаях. "Двигатель" в изобретении будет называться “двигателем на стороне усилителя руля с электронным управлением” в необходимых случаях для отличия его от двигателя на стороне РУППЧ) и который выполнен с возможностью приложения физической силы к валу руля для изменения передаточного числа рулевого управления, предусмотренного на стороне перед устройством рулевого управления с электрическим усилителем. В соответствии с этим скорость вращения описанного выше двигателя на стороне усилителя руля с электронным управлением увеличивается или уменьшается, соответственно, в соответствии со скоростью вращения двигателя на стороне РУППЧ. Более конкретно, когда величина изменения выходного угла рулевого управления относительно входного угла рулевого управления относительно велика (то есть когда передаточное число рулевого управления относительно мало), скорость вращения двигателя на стороне РУППЧ увеличивается так, что скорость вращения двигателя на стороне усилителя руля с электронным управлением также увеличивается.
С другой стороны, двигатель на стороне усилителя руля с электронным управлением имеет скорость верхнего предела вращения, как описано выше. Поэтому если скорость вращения вала руля увеличивается двигателем на стороне РУППЧ и, в результате, скорость вращения двигателя на стороне усилителя руля с электронным управлением увеличивается, когда, по меньшей мере, двигатель на стороне усилителя руля с электронным управлением находится в состоянии возможного усиления и осуществляется его привод для приложения силы усиления рулевого управления, скорость вращения двигателя может превышать верхнюю предельную скорость вращения, в зависимости от ситуации. В этом случае величина силы усиления рулевого управления, которая может быть приложена, становится ограниченной, что приводит к тому, что рулевое колесо ощущается тяжелым в ответ на операцию рулевого управления. В результате, могут ухудшиться свойства управления транспортным средством.
Поэтому в соответствии с устройством управления рулевым управлением и способом управления рулевым управлением, описанными выше, когда определяют, что двигатель на стороне усилителя руля с электронным управлением не находится в состоянии, которое соответствует состоянию генерирования энергии, диапазон управления передаточным числом рулевого управления (то есть один предпочтительный режим представляет собой величину коррекции скорости вращения вала руля двигателем РУППЧ) ограничен в соответствии со скоростью вращения двигателя на стороне усилителя руля с электронным управлением устройством ограничения, которое может быть выполнено в форме любой из различных компьютерных систем, таких как различные контроллеры или микрокомпьютеры, или любой один из различных модулей обработки, таких как ЭУМ, или тому подобное.
В частности, в это время приоритет может быть придан применению силы усиления рулевого управления от двигателя на стороне усилителя руля с электронным управлением таким образом, что диапазон управления передаточным числом рулевого управления устройства рулевого управления с переменным передаточным числом может быть ограничен так, что скорость вращения двигателя на стороне усилителя руля с электронным управлением становится равной или меньше, чем верхняя предельная скорость вращения.
Операции такого вида и другие преимущества изобретения будут понятны из примеров вариантов выполнения, описанных ниже.
Краткое описание чертежей
Отличительные признаки, преимущества и техническое и промышленное значение настоящего изобретения будут описаны в следующем подробном описании примерных вариантов выполнения изобретения со ссылкой на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены одинаковые элементы, и на которых:
фиг.1 - схема, концептуально представляющая структуру транспортного средства в соответствии с первым примерным вариантом выполнения изобретения;
фиг.2 - блок-схема устройства привода, предусмотренного в транспортном средстве, показанном на фиг.1;
фиг.3 - блок-схема последовательности операций рулевого управления для управления, выполняемого ЭУМ в транспортном средстве, показанном на фиг.1;
фиг.4 - график, представляющий общий формат характеристики изменения целевого крутящего момента усиления относительно крутящего момента рулевого управления в транспортном средстве, показанном на фиг.1;
фиг.5 - график, представляющий общий формат примера характеристик управляющего напряжения двигателя и крутящего момента усиления относительно скорости вращения двигателя в транспортном средстве, показанном на фиг.1;
фиг.6 - блок-схема последовательности операций первой обработки, которую выполняют в соответствующих случаях в процессе выполнения управления рулевым управлением по фиг.3;
фиг.7 - график, представляющий общий формат примера характеристики верхней предельной скорости вращения относительно управляющего напряжения двигателя в транспортном средстве, показанном на фиг.1;
фиг.8 - блок-схема последовательности операций второго процесса, выполняемого в соответствующих случаях в процессе выполнения управления рулевым управлением согласно фиг.3;
фиг.9 - общий формат примера характеристики максимального управляющего напряжения в относительно напряжения аккумулятора в транспортном средстве, показанном на фиг.1;
фиг.10 - общий формат примера характеристик обратной скорости вращения относительно максимального управляющего напряжения в транспортном средстве, показанном на фиг.1;
фиг.11 - блок-схема последовательности операций третьего процесса, выполняемого в соответствующих случаях в процессе выполнения управления рулевым управлением согласно фиг.3;
фиг.12 - общий формат в соответствии с примером характеристики обратного управляющего напряжения относительно скорости вращения двигателя в транспортном средстве, показанном на фиг.1; и
фиг.13 - схема, концептуально представляющая структуру транспортного средства в соответствии со вторым примерным вариантом выполнения изобретения.
Подробное описание вариантов выполнения изобретения
Далее со ссылкой на прилагаемые чертежи будет описаны различные примерные варианты выполнения, относящиеся к устройству управления рулевым управлением транспортного средства в соответствии с изобретением. Вначале будет описана структура транспортного средства 10 в соответствии с первым примерным вариантом выполнения изобретения со ссылкой на фиг.1, на которой представлена схема, концептуально изображающая основную структуру транспортного средства 10.
На фиг.1 транспортное средство 10 имеет пару левого и правого передних колес FL и FR, которые представляют собой управляемые колеса и выполнены с возможностью перемещения в требуемом направлении в результате рулевого управления этими передними колесами.
Транспортное средство 10 включает в себя электронный управляющий модуль (ЭУМ) 100, усилитель 200 руля с электронным управлением (УРЭУ) и двигатель 300.
ЭУМ 100 представляет собой электронный модуль управления, который включает в себя центральное процессорное устройство (ЦПУ), ПЗУ и ОЗУ (ни одно из которых не показано) и управляет общей работой транспортного средства 10. ЭУМ 100 представляет собой один пример устройства управления рулевым управлением транспортного средства в соответствии с изобретением. ЭУМ 100 выполняет основное управление рулевым управлением, которое будет описано ниже, для управления операцией усилителя 200 руля с электронным управлением в соответствии с программой управления, сохраненной в ПЗУ.
В частности, ЭУМ 100 представляет собой интегральный электронный модуль управления, который функционирует как пример устройства определения, первого устройства управления, второго устройства управления, третьего устройства управления, и устройства ограничения, в соответствии с изобретением. Все операции, относящиеся к каждому из этих устройств, выполняются в ЭУМ 100. Однако физические, механические и электрические структуры этих устройств, в соответствии с изобретением, не ограничиваются этим. Например, устройства также могут быть выполнены в форме различных компьютерных систем, таких как различные контроллеры или микрокомпьютеры, или различные модули обработки, такие как множество ЭУМ, или тому подобное.
Усилитель 200 руля с электронным управлением представляет собой пример устройства рулевого управления с электрическим усилением в соответствии с изобретением, которое управляет передними колесами FL и FR, которые используются как управляемые колеса.
Усилитель 200 руля с электронным управлением включает в себя колесо 201 рулевого управления, вал 202 руля, вал 203 с шестерней, механизм 204 реечной передачи, датчик 205 крутящего момента, двигатель 206 усилителя, датчик 207 вращения и устройство 208 привода.
Колесо 201 рулевого управления представляет собой устройство рулевого управления, которое выполняет функции интерфейса, через которое водитель может выполнять операцию рулевого управления.
Вал 202 руля представляет собой корпус вала, который соединен с колесом 201 рулевого управления и вращается в том же направлении, что и колесо 201 рулевого управления, когда водитель поворачивает колесо 201 рулевого управления.
Вал 203 с шестерней представляет собой вращающийся корпус вала, который используется как пример вала руля в соответствии с изобретением и соединен с шестерней 204b, которая будет описана ниже, находящейся на его дальнем оконечном участке (то есть на участке, который находится после него относительно направления, в котором передается входное воздействие рулевого управления, то есть на стороне управляемых колес). Вал 203 с шестерней вращается в том же направлении, что и вал 202 руля.
Механизм 204 реечной передачи представляет собой механизм рулевого управления, который включает в себя шестерню 204b, соединенную с дальним оконечным участком вала 203 с шестерней, и зубчатую рейку 204a, на которой сформированы зубья, зацепленные с зубьями 204b шестерни. Механизм 204 реечной передачи передает силу рулевого управления на каждое из управляемых колес через кулачок и поперечную рулевую тягу (ни один из них не обозначен номером ссылочной позиции), которые соединены с дальним оконечным участком зубчатой рейки 204a, в результате преобразования вращения шестерни 204b в поперечное (то есть влево и вправо на чертеже) перемещение зубчатой рейки 204a. Таким образом, так называемый способ рулевого управления с реечной передачей реализован в усилителе 200 руля с электронным управлением с использованием механизма 204 реечной передачи.
В частности, в данном примерном варианте выполнения вал 203 с шестерней и шестерня 204b непосредственно соединены так, что скорость вращения вала 203 с шестерней является такой же, как и скорость вращения шестерни 204b. Однако это представляет собой только пример. В качестве альтернативы, например, скорость вращения вала 203 с шестерней также может быть передана к шестерне 204b, после ее соответствующего уменьшения, например, с помощью понижающей передачи, имеющей фиксированное или переменное передаточное число редуктора.
В частности, пример механизма управления типа реечной передачи используется с усилителем 200 руля с электронным управлением таким образом, но также можно использовать механизм рулевого управления типа шариковой гайки, или механизм рулевого управления некоторого другого аналогичного типа. Кроме того, даже если используется механизм рулевого управления типа реечной передачи, тип и форма составляющих элементов и способ, в соответствии с которым эти составляющие элементы пространственно расположены, и т.п., ни коим образом не ограничены какими-либо существенными ограничениями (если такие ограничения существуют), на основе, по меньшей мере, пространства установки, стоимости, долговечности или надежности и т.п.
Датчик 205 крутящего момента представляет собой датчик, который определяет крутящий момент MT рулевого управления, вводимый водителем (который представляет собой один пример величины крутящего момента заданного типа, в соответствии с изобретением). Более конкретно, дальний оконечный участок вала 202 руля и ближний оконечный участок вала 203 с шестерней соединены торсионным валом, который не показан, и кольцо для определения разности фаз поворота закреплено как на ближнем, так и на дальнем оконечных участках торсионного вала. Такой торсионный вал скручивается в соответствии с и в направлении вращения крутящего момента рулевого управления, который передают через вал 202 руля, когда водитель транспортного средства 10 поворачивает колесо 201 рулевого управления, передавая таким образом крутящий момент рулевого управления на вал 203 с шестерней, образуя скручивание.
Поэтому когда передают крутящий момент рулевого управления, возникает разность фаз поворота между кольцами для определения разности фаз поворота, описанной выше. Датчик 205 крутящего момента определяет эту разность фаз поворота, преобразует ее в крутящий момент рулевого управления и выводит электрический сигнал, обозначающий этот крутящий момент MT рулевого управления. Кроме того, датчик 205 крутящего момента электрически соединен с ЭУМ 100 таким образом, что ЭУМ 100 выполнен с возможностью получения определяемого крутящего момента MT рулевого управления через фиксированные или переменные циклы.
В частности, когда датчик 205 крутящего момента определяет крутящий момент MT рулевого управления таким образом, он также определяет функцию рулевого управления. Например, датчик 205 крутящего момента определяет крутящий момент MT рулевого управления со знаком "плюс", когда колесо 201 рулевого управления поворачивают вправо (или влево), то есть когда направление рулевого управления является правым (или левым), и определяет крутящий момент MT рулевого управления со знаком "минус", когда колесо 201 рулевого управления поворачивается влево (или вправо), то есть когда направление рулевого управления является левым (или правым).
Двигатель 206 усилителя представляет собой бесщеточный двигатель постоянного тока, который представляет собой один пример двигателя в соответствии с изобретением. Двигатель 206 усилителя имеет i) ротор, который не показан, на котором установлены постоянные магниты и который закреплен на валу 203 с шестерней, описанном выше, и ii) статор, также не показанный, который окружает ротор. Двигатель 206 усилителя генерирует крутящий момент Tm усиления (который представляет собой один пример силы усиления рулевого управления в изобретении) с помощью ротора, вращающегося под действием вращающегося магнитного поля, формируемого внутри двигателя 206 усилителя при подаче тока в статор через устройство 208 привода. Направление, в котором генерируется крутящий момент Tm усиления, является тем же, что и направление вращения ротора.
В частности, способ, в соответствии с которым применяют крутящий момент усилителя рулевого управления в соответствии с изобретением, не ограничен тем, что представлено здесь в качестве иллюстрации. В качестве альтернативы, например, крутящий момент, выводимый из двигателя, может быть передан на вал с шестерней после уменьшения скорости вращения, используя понижающую передачу, которая не показана, или сила усиления рулевого управления может быть приложена как сила, которая усиливает вращение шестерни, или как сила, которая усиливает возвратно-поступательные движения зубчатой рейки, вместо вращательного движения шестерни. Таким образом, способ, в соответствии с которым силу усиления рулевого управления выводят в изобретении, не ограничивается чем-либо, если только крутящий момент усиления, выводимый из двигателя 206 усилителя, в конечном итоге может быть передан, как, по меньшей мере, часть силы рулевого управления, которая управляет управляемыми колесами.
Датчик 207 вращения представляет собой тип кодера вращения, который установлен на двигателе 206 усилителя. Такой датчик 207 вращения определяет скорость ω вращения двигателя, которая представляет собой скорость вращения двигателя 206 усилителя, с информацией, относящейся к фазе поворота. Датчик 207 вращения электрически соединен с ЭУМ 100 так, что ЭУМ 100 выполнен с возможностью получения детектируемой скорости ω вращения двигателя в фиксированных или переменных циклах. В частности, устройство, которое определяет скорость вращения двигателя 207 усилителя, не ограничено декодером вращения, но также может быть выполнено, например, как круговой датчик положения или тому подобное.
Устройство 208 привода представляет собой, например, устройства привода в соответствии с изобретением и управляет состоянием вращающегося магнитного поля, формируемого в двигателе 206 усилителя путем подачи тока в статор двигателя 206 усилителя. Устройство 208 привода электрически соединено с ЭУМ 100 таким образом, что ЭУМ 100 выполнен с возможностью управления работой каждой части устройства 208 привода.
Здесь структура устройства 208 привода будет описана со ссылкой на фиг.2, на которой показана блок-схема устройства 208 привода. В частности, те участки на фиг.2, которые являются теми же, что и участки на фиг.1, будут обозначены такими же ссылочными позициями, и описание этих участков будет исключено в соответствующих случаях.
Как показано на фиг.2, устройство 208 привода включает в себя участок 208A схемы широтно-импульсной модуляции (схемы PWM), участок 208B реле и участок 208C привода. В частности, режим усиления во время привода двигателя 206 усилителя может представлять собой любой один из различных известных режимов. Таким образом, режим привода двигателя 206 усилителя, который включает в себя структуру устройства 208 привода, необязательно огранен представленным здесь режимом.
Участок 208A схемы PWM представляет собой схему, которая формирует сигнал напряжения управления PWM, обозначающий управляющее напряжение Vq двигателя (то есть напряжение оси q двигателя 206 усилителя), которое в одном примере представляет собой напряжение приведения в соответствии с изобретением, и передает сигнал напряжения управления PWM в участок 208C привода. В частности, управляющее напряжение Vq двигателя передают в участок 208A схемы PWM после преобразования в трехфазное управляющее напряжение, то есть управляющее напряжение Vu фазы u, управляющее напряжение Vv фазы v, и управляющее напряжение Vw фазы w, используя обработку трехфазного преобразования, которую выполняют на стороне ЭУМ 100 участком 209 трехфазного преобразования.
В частности, управляющее напряжение Vq двигателя имеет положительное значение и отрицательное значение, одно из которых соответствует одному направлению рулевого управления транспортного средства 10 (например, вправо) и другие из которых соответствуют другому направлению рулевого управления транспортного средства 10 (например, влево). Аналогично скорость ω вращения двигателя также имеет положительное значение и отрицательное значение, одно из которых соответствует одному направлению рулевого управления транспортного средства 10 (например, вправо) и другое из которых соответствует другому направлению рулевого управления транспортного средства 10 (например, влево). Следовательно, крутящий момент Tm усиления, который выводят из двигателя 206 усилителя, обозначен знаком "плюс" или знаком "минус", один из которых соответствует направлению рулевого управления транспортного средства 10 (такому, как вправо) и другое из которых соответствует другому направлению рулевого управления транспортного средства 10 (такому, как влево).
Участок 208B реле представляет собой контактную схему, которая избирательно разрешает или прерывает протекание тока между участком 208A схемы PWM и участком 208C привода, в зависимости от состояния участка 208B реле, то есть закорочен ли участок 208B реле или разомкнут. Таким образом, когда участок 208B реле закорочен, ток может протекать между участком 208A схемы PWM и участком 208C привода. Когда участок 208B реле разомкнут, поток тока от участка 208A схемы PWM в участке 208C привода прерывается.
Участок 208C привода представляет собой схему, которая включает в себя мощный транзистор, соответствующий каждой фазе статора, и схему обратного преобразователя, и т.п. для подачи тока в статор двигателя 206 усилителя. Участок 208C привода электрически соединен со схемой 208A PWM и принимает сигнал напряжения управления PWM на выводе затвора каждого мощного транзистора. Привод двигателя 206 усилителя осуществляют с использованием тока Iq усиления, который представляет собой ток привода, подаваемый в статор, в соответствии с сигналом напряжения управления PWM, подаваемым на вывод затвора, и выводит крутящий момент Tm усиления.
Двигатель 300 представляет собой двигатель внутреннего сгорания, который выполняет функцию источника питания транспортного средства 10, и использует бензин в качестве топлива. Например, двигатель 300 имеет множество цилиндров, таких как 4, 6, 8 или 12, и может иметь любую одну из различных конфигураций, такую как линейная конфигурация, V-образная конфигурация или горизонтальная оппозитная конфигурация, в зависимости от расположения этих цилиндров. Движущую силу, выводимую из коленчатого вала, который не показан, двигателя 300, прикладывают к передним колесам FL и FR, которые представляют собой управляемые колеса, через дифференциал и вал привода и т.п., не показаны, соответствующим образом. Таким образом, транспортное средство 10 представляет собой транспортное средство с передним размещением двигателя и передним приводом. В частности, режим привода транспортного средства 10, конечно, не ограничен FF. Например, режим привода также может быть FR (переднее расположение двигателя и задний привод), при котором осуществляют привод задних колес, которые не показаны, или может иметь привод на четыре колеса, при котором осуществляют привод передних колес и задних колес. Кроме того, тип используемого топлива не ограничен бензином. Например, также можно использовать спирт или дизельное топливо, или тому подобное. Кроме того, транспортное средство 10 может представлять собой гибридное транспортное средство, в котором предусмотрен электродвигатель или тому подобное, как источник энергии, в дополнение к двигателю 300 внутреннего сгорания.
Аккумулятор 400, который представляет собой аккумулятор транспортного средства, предусмотрен в транспортном средстве 10. Аккумулятор 400 выполняет функцию источника питания для различных типов вспомогательного оборудования в транспортном средстве 10, включающем в себя усилитель 200 руля с электронным управлением. В частности, напряжение Vbat аккумулятора, которое представляет собой напряжение аккумулятора 400, получают с помощью ЭУМ 100 в фиксированных или переменных циклах.
Далее будет описана операция примерного варианта выполнения со ссылкой на чертежи, когда это соответствует. Вначале управление рулевым управлением, выполняемое ЭУМ 100, будет подробно описано со ссылкой на фиг.3, на которой показана блок-схема последовательности операций управления рулевым управлением.
На фиг.3 ЭУМ 100 выполняет процесс исходной установки (этап S101). В ходе этого процесса исходной установки крутящий момент Tm рулевого управления и скорость ω вращения двигателя получают с помощью датчика 205 крутящего момента и датчика 207 вращения соответственно. В частности, крутящий момент рулевого управления и скорость ω вращения двигателя ниже, в принципе, получают через фиксированные циклы с помощью ЭУМ 100 и таким образом постоянно обновляют последними значениями.
Кроме того, в процессе исходной установки ЭУМ 100 устанавливает управляющее напряжение Vq двигателя равным 0 как исходное значение. Кроме того, ЭУМ 100 устанавливает флаг Fg_ASS возможного усиления, который обозначает, находится ли двигатель 206 усилителя в состоянии возможного усиления (то есть состояние, в котором его можно использовать для усиления), которое будет описано ниже, в 1, как исходное значение. Значение 1 в данном случае означает, что двигатель 206 усилителя находятся в состоянии возможного усиления. Флаг Fg_ASS возможного усиления сохраняют с возможностью его обновления в ОЗУ ЭУМ 100 и его перезаписывают в соответствующие заданные моменты времени обновления, в процессе выполнения управления рулевым управлением.
В частности, флаг Fg_ASS возможного усиления принимает значение либо 1, либо 0. Значение 0 обозначает, что двигатель 206 усилителя находится в состоянии генерирования энергии, которое будет описано ниже.
Когда процесс исходной установки заканчивается, ЭУМ 100 рассчитывает целевое значение крутящего момента Tmtg усиления, которое представляет собой целевое значение для крутящего момента усилителя Tm усиления двигателя 206 усилителя (этап S102). В это время целевой крутящий момент Tmtg усиления рассчитывают в соответствии с крутящим моментом Tm рулевого управления, получаемым на этапе S101.
Здесь взаимосвязь между крутящим моментом Tm типом рулевого управления и целевым крутящим моментом Tmtg усиления будет описана со ссылкой на фиг.4, на которой показан график, представляющий общий формат характеристики изменения целевого крутящего момента Tmtg усиления относительно крутящего момента Tm рулевого управления.
На фиг.4 по вертикальной оси представлен целевой крутящий момент Tmtg усиления и по горизонтальной оси представлен крутящий момент MT рулевого управления. Как показано на графике, целевой крутящий момент Tmtg усиления установлен как функция, которая увеличивается нелинейно, по мере увеличения крутящего момента MT рулевого управления. Кроме того, область, где крутящий момент MT рулевого управления равен или меньше, чем MT0, представляет собой неопределяемую область, поэтому целевой крутящий момент Tmtg усиления в этой области равен нулю.
В частности, только случай, в котором крутящий момент MT рулевого управления имеет положительное значение, показан на фиг.4. Однако крутящий момент MT рулевого управления может иметь либо положительное, или отрицательное значение, в зависимости от направления рулевого управления транспортного средства 10, как описано выше. Целевой крутящий момент Tmtg усиления относительно крутящего момента MT рулевого управления на отрицательной стороне имеет форму, в которой характеристика, показанная на фиг.4, является симметричной относительно точки начала координат (нуля). ЭУМ 100 сохраняет в ПЗУ карту целевого крутящего момента усиления, в которой взаимосвязь, показанная на фиг.4, заранее преобразована в цифровую форму, и рассчитывает целевой крутящий момент Tmtg усиления путем избирательного получения значения, которое соответствует крутящему моменту MT рулевого управления в это время из карты целевого крутящего момента усиления. В частности, таким образом расчет в данном примерном варианте выполнения включает в себя избирательное получение значения на основе соответствующей заранее установленной взаимосвязи.
Возвращаясь теперь к фиг.3, когда рассчитывают целевой крутящий момент Tmtg усиления, ЭУМ 100 рассчитывает целевой ток Iqtg усиления, который представляет собой целевое значение для тока Iq усиления (этап S103).
Здесь взаимосвязь, показанная в Выражениях (1), (2) и (3), представленных ниже, существует между крутящим моментом Tm усиления, током Iq усиления и управляющим напряжением Vq двигателя в усилителе 200 руля с электронным управлением в данном примерном варианте выполнения. Выражения Kt представляют собой константу крутящего момента двигателя 206 усиления, Kv представляет собой коэффициент противоэлектродвижущей силы (например, в единицах V x секунды/рад) и Ra представляет собой значение электрического сопротивления. Эти значения заранее сохранены как фиксированные значения в ПЗУ.
Здесь целевой ток Iqtg усиления рассчитывают, как показано в Выражении (4), приведенном ниже, в результате преобразования Выражения (1) путем замены крутящего момента Tm усиления на целевой крутящий момент Tmtg, рассчитанный ранее. ЭУМ 100 рассчитывает целевой ток Iqtg усиления в соответствии с выражением (4), приведенным ниже.

Здесь дополнительная информация, относящаяся к приведенному выше выражению (3), в отношении вычитаемого члена, представленного в круглых скобках с правой стороны выражения (3), произведение коэффициента Kv противоэлектродвижущей силы и скорости ω вращения двигателя соответствует противоэлектродвижущей силе, генерируемой в результате вращения двигателя 206 усилителя. Если такая противоэлектродвижущая сила будет больше, чем управляющее напряжение Vq двигателя, тогда правая сторона выражения (3) будет представлять собой отрицательное значение, и знак крутящего момента MT рулевого управления будет обратным. Таким образом, в это время крутящий момент MT рулевого управления преобразуется в силу обратного усиления рулевого управления, которая работает в направлении, которое противодействует силе рулевого управления, независимо от того, является ли исходный знак положительным или отрицательным, и двигатель 206 усилителя будет переведен в состояние генерирования энергии.
Здесь взаимозависимость между управляющим напряжением Vq двигателя, крутящим моментом MT рулевого управления и скоростью ω вращения двигателя будет описана со ссылкой на фиг.5, на которой показан график, представляющий общий формат для примера характеристики управляющего напряжения Vq двигателя и крутящего момента Tm усиления относительно скорости ω вращения двигателя.
Характеристика управляющего напряжения Vq двигателя в отношении скорости ω вращения двигателя показана в верхней части на фиг.5 и характеристика крутящего момента Tm усиления относительно скорости ω вращения двигателя показана в нижней части фиг.5. В частности, характеристическая линия PRF_Vqa (см. сплошную линию) в верхней части фиг.5 соответствует случаю, в котором целевой крутящий момент Tmtg усиления равен Tm0 (Tm0>0), и управляющим напряжением Vq двигателя для привода крутящего момента Tm усиления в соответствии с целевым крутящим моментом Tmtg усиления управляют, используя ПИ управление, которое будет описано ниже. Характеристическая линия PRF_Vqb (см. альтернативную штрихпунктирную линию) соответствует случаю, в котором целевой крутящий момент Tmtg усиления составляет Tm0, и управляющее напряжением Vq двигателя поддерживают постоянным. Кроме того, характеристическая линия PRF_Tma (см. сплошную линию) в нижней части фиг.5 соответствует характеристической линии PRF_Vqa, и характеристическая линия PRF_Tmb (см. альтернативную штрихпунктирную линию) соответствует характеристической линии PRF_Vqb.
Когда скорость ω вращения двигателя равна нулю, вычитаемый член в правой стороны в выражении (3), приведенном выше, равен управляющему напряжению Vq двигателя таким образом, что управляющее напряжение Vq двигателя для вывода целевого крутящего момента Tmtg усиления становится “Ra/Kt×Tm0” на обеих характеристиках характеристических линий PRF_Vqa и PRF_Vqb, как показано на чертеже.
С одной стороны, если скорость ω вращения двигателя увеличивается, значение вычитаемого члена уменьшается, в соответствии с этой величиной увеличения. Поэтому когда управляющее напряжение Vq двигателя поддерживают постоянным в соответствии с характеристической линией PRF_Vqb, крутящий момент Tm усиления начинает уменьшаться по мере увеличения скорости ω вращения двигателя, как показано характеристической линией PRF_Tmb. В результате, крутящий момент Tm усиления становится равным нулю при скорости ω1b вращения двигателя (ω1b>0).
С другой стороны, когда управляющее напряжение Vq двигателя для поддержания крутящего момента Tm усиления на значении целевого крутящего момента усиления Tm0 увеличивается в соответствии с характеристической линией PRF_Vqa, крутящий момент Tm усиления поддерживают на целевом значении крутящего момента Tm0 усиления относительно увеличения скорости ω вращения двигателя так, что при этом скорость ω вращения двигателя становится равной ω0, как показано на характеристической линии PRF_Tma.
В частности, максимальное управляющее напряжение Vqmax (то есть пример максимального напряжения в изобретении), которое является либо фиксированным, или переменным (в данном примерном варианте выполнения оно переменное, как будет описано ниже), предусмотрено для управляющего напряжения Vq двигателя, и управляющее напряжение Vq двигателя устанавливают равным или меньше, чем это максимальное управляющее напряжение Vqmax. Поэтому в момент, когда скорость ω вращения двигателя становится равной ω0 и управляющее напряжение Vq двигателя, требуемое для поддержания крутящего момента Tm усиления на целевом значении крутящего момента Tm0 усиления, становится равным Vqmax, управляющее напряжение Vq двигателя становится насыщенным, и крутящий момент Tm усиления начинает уменьшаться по мере увеличения скорости ω вращения двигателя. В результате, крутящий момент Tm усиления становится равным нулю при скорости ω вращения двигателя, равной ω1a (ω1a>ω1b), как показано характеристической линией PRF_Tma.
Здесь, когда крутящий момент Tm усиления находится в области ниже нуля на чертеже, знак усилителя крутящего момента Tm усиления становится обратным. Такое изменение на обратный знак крутящего момента Tm усиления, несмотря на тот факт, что знак управляющего напряжения Vq двигателя и скорость ω вращения двигателя не изменяются, означает, что крутящий момент Tm усиления изменился на обратный крутящий момент усиления, который действует в направлении, которое противодействует силе рулевого управления. Таким образом, в данном примерном варианте выполнения двигатель 206 усилителя находится в состоянии генерирования энергии в области, где знаки управляющего напряжения Vq двигателя и скорости ω вращения двигателя являются одинаковыми (в данном примерном варианте выполнения случай, в котором знаки управляющего напряжения Vq двигателя и скорость ω вращения двигателя являются одинаковыми, соответствует одному направлению рулевого управления), и знак крутящего момента Tm усиления стал обратным, и в возможном состоянии усиления в области, где знаки управляющего напряжения Vq двигателя и скорости ω вращения двигателя являются одинаковыми, и знак крутящего момента Tm усиления не преобразован на обратный (то есть где крутящий момент Tm усиления равен или больше нуля по фиг.5).
Таким образом, в усилителе 200 руля с электронным управлением существует скорость ω вращения двигателя (то есть ω1a, или ω1b, описанные выше, или тому подобное), которая определяет, находится ли двигатель 206 усилителя в состоянии возможного усиления или в состоянии генерирования энергии, если только управляющее напряжение Vq двигателя ограничено максимальным управляющим напряжением Vqmax. Ниже такого рода верхнее предельное значение скорости ω вращения двигателя называется “верхней предельной скоростью ω1 вращения” в соответствующих случаях. В частности, когда ω имеет отрицательное значение (то есть другое направление рулевого управления), она, конечно, становится нижним предельным значением, но здесь будет описан только случай, в котором ω имеет положительное значение, для исключения усложнения описания. Кроме того, такая верхняя предельная скорость ω1 вращения представляет собой пример верхней предельной скорости вращения в соответствии с изобретением.
Рассмотрим теперь фиг.3, когда рассчитывают целевой ток Iqtg усиления, ЭУМ 100 рассчитывает опорное управляющее напряжение Vqnrm двигателя, которое представляет собой опорное значение для управляющего напряжения Vq двигателя (этап S104). Здесь опорное управляющее напряжение Vqnrm двигателя рассчитывают, используя ПИ управление (то есть управление с обратной связью, которое основано на величине коррекции обратной связи, которая включает в себя пропорциональный член и интегральный член).
Более конкретно, ЭУМ 100 рассчитывает управляющее напряжение Vq двигателя для перевода разности ΔI между целевым током Iqtg усиления и током Iq усиления, в пределах заданного диапазона (то есть таким образом, что крутящий момент Tm усиления, выводимый из двигателя 206 усилителя, становится асимптотическим или сходится с целевым крутящим моментом Tmtg усиления). В это время значение тока Iq усиления, подаваемого обратно, рассчитывают путем замены значения управляющего напряжения Vq двигателя и скорости ω вращения двигателя в этот момент времени в Выражении (2), показанном выше. Однако когда устройство определения, которое может непосредственно определять ток Iq усиления, предусмотрено после участка 208C привода, например значение тока Iq усиления может быть получено из этого устройства определения, и его можно использовать для расчета разности ΔI.
При расчете опорного управляющего напряжения Vqnrm двигателя ЭУМ 100 определяет, равен ли 1 флаг Fg_ASS возможного усиления, то есть находится ли двигатель 206 усилителя в состоянии возможного усиления (этап S105). В частности, во время начала управления рулевым управлением флаг Fg_ASS возможного усиления установлен в 1, который представляет собой исходное значение, в процессе исходной установки на этапе S101, таким образом, что результат определения на этапе S105 в это время всегда определенно представляет собой "да".
Если флаг Fg_ASS возможного усиления равен 1 (то есть ДА на этапе S105), то есть если двигатель 206 усилителя находится в состоянии возможного усиления (то есть в состоянии, в котором крутящий момент Tm усиления будет выведен в направлении, в котором происходит усиление силы рулевого управления), ЭУМ 100 выполняет первую обработку, которая будет описана ниже (этап S200). Если, с другой стороны, флаг Fg_ASS возможного усиления равен 0 (то есть НЕТ на этапе S105), то есть если двигатель 206 усиления находится в состоянии генерирования энергии (то есть в состоянии, в котором крутящий момент Tm усиления будет выведен в направлении, которое противодействует силе рулевого управления), ЭУМ 100 выполняет вторую обработку, которая также будет описана ниже (этап S300). После выполнения первой обработки или второй обработки ЭУМ 100 выполняет третью обработку (этап S400), после которой процедура возвращается на этап S102 и последовательность этапов повторяется.
Далее подробно описан со ссылкой на фиг.6, которая представляет собой блок-схему последовательности операций первого процесса, первый процесс, который выполняют, если двигатель 206 усилителя находится в данный момент времени в состоянии возможного усиления.
На фиг.6 ЭУМ 100 рассчитывает верхнюю скорость ω1 вращения, описанную выше (этап S201). В частности, при ссылке на выражение (3) для того, чтобы сделать крутящий момент Tm усиления положительным значением (то есть действовать в направлении усиления силы рулевого управления), вычитаемый член с правой стороны в выражении (3) должен иметь положительное значение (включая в себя нуль в данном случае). Поэтому выражение (5) должно быть удовлетворено для того, чтобы двигатель 206 усилителя находился в состоянии возможного усиления. Таким образом, в усилителе 200 руля с электронным управлением управляющее напряжение Vq двигателя и скорость ω вращения двигателя представляют собой факторы, которые определяют, находится ли двигатель 206 усиления в состоянии возможного усиления или в состоянии генерирования энергии.

Как следует из выражения (5), приведенного выше, для того чтобы поддерживать двигатель 206 усилителя в состоянии возможного усиления, скорость ω вращения двигателя должна быть равна или меньше, чем верхнее предельное значение (то есть Vq/Kv), которое установлено в соответствии с управляющим напряжением Vq двигателя. Это верхнее предельное значение представляет собой верхнюю предельную скорость ω1 вращения, описанную выше.
Здесь взаимосвязь между управляющим напряжением Vq двигателя и верхней предельной скоростью ω1 вращения будет описана со ссылкой на фиг.7, на которой показан график, представляющий общий формат примера характеристики верхнего предельного значения скорости ω1 вращения относительно управляющего напряжения Vq двигателя.
На фиг.7 на вертикальной оси представлена верхняя предельная скорость ω1 вращения и на горизонтальной оси представлено управляющее напряжение Vq двигателя. Как показано на графике, верхняя предельная скорость ω1 вращения установлена как функция, которая линейно увеличивается при увеличении управляющего напряжения Vq двигателя. ЭУМ 100 заранее сохраняет в ПЗУ карту верхней предельной скорости вращения, в которой взаимосвязь, показанная на фиг.7, преобразована в цифровые величины, и рассчитывает верхнюю скорость ω1 вращения, избирательно получая значение, которое соответствует управляющему напряжению Vq двигателя в это время из карты верхней предельной скорости вращения. Однако при расчете верхней предельной скорости ω1 вращения абсолютно нет необходимости обращаться к этой карте. Например, верхняя предельная скорость ω1 вращения может также быть рассчитана от случая к случаю как частное управляющего напряжения Vq двигателя, разделенного на коэффициент Kv противоэлектродвижущей силы, как показано в приведенном выше Выражении (5).
Возвращаясь обратно к фиг.6, когда рассчитывают верхнюю предельную скорость ω1 вращения, ЭУМ 100 определяет, совпадает ли знак управляющего напряжения Vq двигателя и знак скорости ω вращения двигателя, и превышает ли скорость ω вращения двигателя верхнюю предельную скорость ω1 вращения (этап S202). Таким образом, ЭУМ 100 определяет, находится ли двигателя 206 усилителя в состоянии генерирования энергии.
В частности, операция определения, выполняемая ЭУМ 100, описанная здесь, представляет собой пример операции устройства определения в соответствии с изобретением. В этом примерном варианте выполнения определяют, находится ли двигатель 206 усилителя в состоянии генерирования энергии, которое представляет собой пример состояния, которое соответствует состоянию генерирования энергии в соответствии с изобретением. Однако в качестве альтернативы для эффективного и надежного сведения к минимуму недостатка, получаемого в результате того, что двигатель 206 усилителя переходит в состояние генерирования энергии, ЭУМ 100 также может определять, что скорость ω вращения двигателя скоро превысит верхнюю предельную скорость ω1 вращения (то есть перейдет ли скоро двигатель 206 усилителя в состояние генерирования энергии). Другими словами, ЭУМ 100 также может прогнозировать или оценивать, перейдет ли двигатель 206 усилителя в состояние генерирования энергии. Опорное значение определения, когда выполняют такого рода определение, прогнозирование или оценку, может быть установлено свободно, если только оно обеспечивает более эффективную и надежную минимизацию недостатка, получаемого в результате того, что двигатель 206 усилителя переходит в состояние генерирования энергии. Например, такого рода определения, прогнозирование или оценка может быть выполнено в случае, когда скорость ω вращения двигателя превышает опорное значение определения, которое представляет собой разность ω1 минус определенный запас Δω, который является либо фиксированным, или переменным. В качестве альтернативы, такого рода запас также может быть включен заранее в саму верхнюю предельную скорость ω1 вращения.
Если скорость ω вращения двигателя больше, чем верхняя предельная скорость ω1 вращения, когда знаки Vq и ω являются одинаковыми (то есть ДА на этапе S202), то есть когда двигатель 206 усилителя находится в состоянии генерирования энергии, ЭУМ 100 устанавливает флаг Fg_ASS возможного усиления в 0, что соответствует случаю, в котором двигатель 206 усилителя находится в состоянии генерирования энергии (этап S203).
В частности, когда выполняют обработку на этапе S203, предыдущее состояние двигателя 206 усилителя представляет собой состояние возможного усиления, и текущее значение двигателя 206 усилителя представляет собой состояние генерирования энергии. Ниже состояние такого рода двигателя 206 усилителя называется первым состоянием двигателя, когда это соответствует.
Если, с другой стороны, знаки Vq и ω не совпадают или скорость ω вращения двигателя равна или меньше, чем верхняя предельная скорость ω1 вращения (то есть НЕТ на этапе S202), то есть если двигатель 206 усилителя находится в состоянии возможного усиления, ЭУМ 100 устанавливает флаг Fg_ASS возможного усиления в 1, что соответствует случаю, в котором двигатель 206 усилителя находится в состоянии возможного усиления (этап S204).
В частности, когда выполняют обработку на этапе S204, предыдущее состояние двигателя 206 усилителя представляет собой состояние возможного усиления и текущее состояние двигателя 206 усилителя представляет собой состояние возможного усиления. Ниже такой вид состояния двигателя 206 усилителя будет называться вторым состоянием двигателя, когда это соответствует. После выполнения обработки на этапе S203 или этапе S204 первая обработка заканчивается.
Далее будет описан со ссылкой на фиг.8, на которой представлена блок-схема последовательности операций второго процесса, второй процесс, который выполняют, если двигатель 206 усилителя в данный момент времени находится в состоянии генерирования энергии.
На фиг.8 ЭУМ 100 рассчитывает максимальное управляющее напряжение Vqmax, которое представляет собой максимальное значение управляющего напряжения Vq двигателя, описанное выше, на основе напряжения Vbat аккумулятора (этап S301).
Здесь взаимосвязь между напряжением Vbat аккумулятора и максимальным управляющим напряжением Vqmax будет описана со ссылкой на фиг.9, на которой представлен общий формат примера характеристики максимального управляющего напряжения Vqmax относительно напряжения Vbat аккумулятора.
На фиг.9 по вертикальной оси представлено максимальное управляющее напряжение Vqmax и по горизонтальной оси представлено напряжение Vbat аккумулятора. Как показано на графике, максимальное управляющее напряжение Vqmax установлено как функция, которая линейно повышается по мере увеличения напряжения Vbat аккумулятора. ЭУМ 100 заранее сохраняет карту максимального управляющего напряжения в ПЗУ, в который взаимосвязь, показанная на фиг.9, преобразована в цифровую форму, и рассчитывает максимальное управляющее напряжение Vqmax путем избирательного получения значения, которое в это время соответствует напряжению Vbat аккумулятора, из карты максимального управляющего напряжения.
В частности, в этом случае напряжение Vbat аккумулятора используется как опорное, но максимальное управляющее напряжение Vqmax также может быть установлено переменным, например, в соответствии с состоянием заряда аккумулятора 400. В качестве альтернативы, максимальное управляющее напряжение Vqmax может быть фиксированным значением.
Рассмотрим теперь фиг.8, когда рассчитывают максимальное управляющее напряжение Vqmax, ЭУМ 100 рассчитывает скорость ω2 обратного вращения (этап S203). Здесь скорость ω2 обратного вращения представляет собой значение скорости вращения двигателя, когда двигатель 206 усилителя возвращается из состояния генерирования энергии в состояние возможного усиления, и представляет собой функцию максимального управляющего напряжения Vqmax, рассчитанного на этапе S301.
Здесь взаимосвязь между максимальным управляющим напряжением Vqmax и скоростью ω2 обратного вращения будет описана со ссылкой на фиг.10, которая представляет общий формат примера характеристики скорости ω2 обратного вращения относительно максимального управляющего напряжения Vqmax.
На фиг.10 по вертикальной оси представлена скорость ω2 обратного вращения и по горизонтальной оси представлено максимальное управляющее напряжение Vqmax. Как показано на графике, скорость ω2 обратного вращения представляет собой функцию, которая линейно увеличивается по мере увеличения максимального управляющего напряжения Vqmax. ЭУМ 100 сохраняет в ПЗУ карту скорости обратного вращения, в которой взаимосвязь, показанную на фиг.10, заранее преобразуют в цифровую форму, и рассчитывает скорость ω2 обратного вращения, избирательно получая значение, которое соответствует максимальному управляющему напряжению Vqmax, рассчитанному на этапе S301, из карты скорости обратного вращения.
Возвращаясь снова к фиг.8, когда рассчитывают скорость ω2 обратного вращения, ЭУМ 100 определяет, является ли скорость ω вращения двигателя меньшей, чем скорость ω2 обратного вращения (этап S303). Таким образом, ЭУМ 100 определяет, вернулся ли двигатель 206 усилителя в состояние возможного усиления.
Если скорость ω вращения двигателя меньше, чем скорость ω2 обратного вращения (то есть ДА на этапе S303), то есть если двигатель 206 усилителя вернулся в состояние возможного усиления, ЭУМ 100 устанавливает флаг Fg_ASS возможного усиления в 1, что соответствует случаю, в котором двигатель 206 усилителя находится в состоянии возможного усиления (этап S304).
В частности, когда выполняют обработку на этапе S304, предыдущее состояние двигателя 206 усилителя представляет собой состояние генерирования энергии, и текущее состояние двигателя 206 усилителя представляет собой состояние возможного усиления. Ниже такого типа состояние двигателя 206 усилителя называется третьим состоянием двигателя в соответствующих случаях.
Если, с другой стороны, скорость ω вращения двигателя равна или больше, чем скорость ω2 обратного вращения (то есть НЕТ на этапе S303), то есть если двигатель 206 усилителя еще не находится в состоянии генерирования энергии, ЭУМ 100 устанавливает флаг Fg_ASS возможного усиления в 0, что соответствует случаю, в котором двигатель 206 усилителя находится в состоянии генерирования энергии (этап S305).
В частности, когда выполняется процесс на этапе S305, предыдущее состояние двигателя 206 усилителя представляет собой состояние генерирования энергии, и текущее состояние двигателя 206 усилителя представляет собой состояние генерирования энергии. Ниже такого типа состояние двигателя 206 усилителя называется четвертым состоянием двигателя, когда это соответствует. После выполнения обработки на этапе S304 или этапе S305 вторая обработка заканчивается.
Далее третья обработка, которую выполняют после первой обработки или второй обработки, будет подробно описана со ссылкой на фиг.11, на которой показана блок-схема последовательности операций третьей обработки.
На фиг.11 ЭУМ 100 определяет, установлен ли флаг Fg_ASS возможного усиления в 0, то есть находится ли двигатель 206 усилителя в состоянии генерирования энергии (этап S401). Если флаг Fg_ASS возможного усиления установлен в 0 (то есть ДА на этапе S401), то есть если двигатель 206 усилителя находится в первом состоянии двигателя или в четвертом состоянии двигателя, описанных выше, ЭУМ 100 управляет участком 208B реле устройства 208 привода таким образом, что он его размыкает (этап S402). Поскольку участком 208B реле управляют так, что оно размыкается, подача тока из участка 208A схемы PWM в участок 208C привода прерывается таким образом, что двигатель 206 усилителя находится в состоянии без привода, что таким образом останавливает усиление силы рулевого управления (то есть обратное усиление) из усилителя 200 руля с электронным управлением. После управления участком 208 реле так, что оно размыкается, заканчивается третья обработка.
Если, с другой стороны, флаг Fg_ASS возможного усиления установлен в 1 (то есть НЕТ на этапе S401), ЭУМ 100 определяет, установлен ли последний флаг Fg_ASS возможного усиления в 0 (этап S403). Если последний флаг Fg_ASS возможного усиления установлен в 0 (то есть ДА на этапе S403), то есть если двигатель 206 усилителя находятся в третьем состоянии двигателя, описанном выше, ЭУМ 100 рассчитывает обратное управляющее напряжение Vqrtn (этап S404).
Здесь обратное управляющее напряжение Vqrtn представляет собой управляющее напряжение двигателя, предназначенное для предотвращения ухудшения возможности привода из-за усиления силы рулевого управления, в соответствии с крутящим моментом Tm усиления, которое внезапно восстанавливается при возврате в состояние возможного усиления (то есть из-за того, что двигатель 206 усилителя, находится в состоянии отсутствия привода, как результат управления участком 208B реле, с его размыканием в это время). Обратное управляющее напряжением Vqrtn представляет собой значение управляющего напряжения Vq двигателя, которое делает вычитаемый член с правой стороны Выражения (3) равным нулю. Поэтому обратное управляющее напряжение Vqrtn представляет собой функцию скорости ω вращения двигателя.
Здесь взаимосвязь между скоростью ω вращения двигателя и обратным управляющим напряжением Vqrtn будет описана со ссылкой на фиг.12, которая представляет общий формат примера характеристик обратного управляющего напряжения Vqrtn относительно скорости ω вращения двигателя.
На фиг.12 по вертикальной оси представлено обратное управляющее напряжение Vqrtn и по горизонтальной оси представлена скорость ω вращения двигателя. Как показано на графике, обратное управляющее напряжение Vqrtn представляет собой функцию, которая линейно увеличивается по мере увеличения скорости ω вращения двигателя. ЭУМ 100 сохраняет карту обратного управляющего напряжения в ПЗУ, в который взаимосвязь, показанная на фиг.12, заранее преобразована в цифровую форму, и рассчитывает обратное управляющее напряжение Vqrtn путем избирательного получения значения, которое соответствует скорости ω вращения двигателя, из карты обратного управляющего напряжения.
Возвращаясь теперь к фиг.11, когда рассчитывают обратное управляющее напряжение Vqrtn, ЭУМ 100 выполняет управление приводом двигателя 206 усилителя (этап S410). Таким образом, обратное управляющее напряжение Vqrtn делают управляющим напряжением Vq двигателя и управляют участком 208A схемы PWM. Участок 208A схемы PWM передает сигнал напряжения управления PWM (трехфазное напряжение в данном примерном варианте выполнения), которое соответствует обратному управляющему напряжению Vqrtn, в участок 208C привода. В результате, ток подают в статор двигателя 206 усилителя таким образом, что двигатель 206 усилителя выводит крутящий момент Tm усиления. В частности, когда этап S410 выполняют после этапа S404, крутящий момент Tm усиления равен нулю.
Если, с другой стороны, последний возможный флаг Fg_ASS усиления установлен в 1 (то есть НЕТ на этапе S403), то есть если двигатель 206 усилителя находится во втором состоянии двигателя, описанном выше, ЭУМ 100 определяет, является ли абсолютное значение разности между текущим управляющим напряжением Vq двигателя и опорным управляющим напряжением Vqnrm двигателя, установленным ранее на этапе S104 управления рулевым управлением, меньше, чем опорная разность ε (этап S405).
Здесь опорная разность ε представляет собой значение индекса, который определяет степень, в которой крутящий момент Tm усиления был преобразован в целевой крутящий момент Tmtg усиления. Опорную разность ε устанавливают заранее на основе тестирования, опыта, теории или моделирования или тому подобное в значение, которое позволяет определять, преобразуется ли крутящий момент Tm усиления в целевой крутящий момент Tmtg усиления в степени, в которой на практике, по меньшей мере, не возникает какой-либо существенной проблемы.
Если абсолютное значение меньше, чем опорная разность ε (то есть ДА на этапе S405), ЭУМ 100 устанавливает опорное управляющее напряжение Vqnrm двигателя, установленное ранее, как управляющее напряжение Vq двигателя (этап S406), и выполняет управление приводом двигателя 206 усилителя, описанного выше (этап S410). В результате, крутящий момент Tm усиления поддерживают как можно быстрее на целевом значении крутящего момента Tm усиления через ПИ управление, в котором выполняется обратная связь по току Iq усиления.
Если, с другой стороны, абсолютное значение разности между текущим управляющим напряжением Vq двигателя и опорным управляющим напряжением Vqnrm двигателя равно или больше, чем опорная разность ε (то есть НЕТ на этапе S405), тогда вначале определяют, превышает ли опорное управляющее напряжение Vqnrm двигателя управляющее напряжение Vq двигателя в точке, когда только короткое время прошло после начала управления крутящим моментом Tm усиления, на основе обратного управляющего напряжения Vqrtn, описанного выше, например (этап S407). В частности, такая обработка представляет собой обработку, которая соответствует изменению в соотношении магнитуды между Vq и Vqnrm, в соответствии с направлением рулевого управления транспортного средства 10.
Если опорное управляющее напряжение Vqnrm двигателя больше, чем управляющее напряжение Vq двигателя (то есть ДА на этапе S407), ЭУМ 100 обновляет управляющее напряжение Vq путем добавления к нему заданной величины ΔVq постепенного изменения для получения самого последнего управляющего напряжения Vq двигателя (этап S408). Кроме того, если опорное управляющее напряжение Vqnrm двигателя будет равно или меньше, чем управляющее напряжение Vq двигателя (то есть если Vqnrm меньше, чем Vq после этапа S405) (то есть НЕТ на этапе S407), ЭУМ 100 обновляет управляющее напряжение Vq двигателя путем вычитания заданной величины ΔVq постепенного изменения из текущего управляющего напряжения Vq двигателя для получения самого последнего управляющего напряжения Vq двигателя (этап S409).
Оба этапа S408 и S409 представляют собой этапы, которые делают управляющее напряжение Vq двигателя асимптотичным с опорным управляющим напряжением Vqnrm двигателя и представляют собой часть процесса для постепенного изменения крутящего момента Tm усиления при возврате к возможному состоянию усиления. После выполнения этих этапов ЭУМ 100 переходит на этап S410, где он осуществляет привод двигателя 206 усилителя в соответствии с установленным управляющим напряжением Vq двигателя. После выполнения управления приводом двигателя 206 усилителя третий процесс заканчивается.
Как описано выше, в соответствии с управлением рулевым управлением в данном примерном варианте выполнения определяют, находится ли двигатель 206 усилителя в состоянии генерирования энергии на основе скорости ω вращения двигателя и управляющего напряжения Vq двигателя (то есть является ли направление усиления двигателя 206 усилителя обратным направлению усиления). Если двигатель 206 усилителя находится в состоянии генерирования энергии, участком 208B реле устройства 208 привода, который управляет двигателем 206 усилителя, управляют с размыканием таким образом, что подача тока к двигателю 206 усилителя прекращается. В результате, количество энергии, генерируемой двигателем 206 усилителя, уменьшается до нуля, предотвращая таким образом возникновение ситуации, в которой крутящий момент Tm усиления действует в обратном направлении усиления. В соответствии с этим ухудшение ощущения рулевого управления, из-за крутящего момента Tm усиления, действующего в направлении, обратном направлению усиления, из противоэлектродвижущей силы двигателя 206 усилителя может быть подавлено как можно быстрее.
Кроме того, в соответствии с примерным вариантом выполнения, когда двигатель 206 усилителя возвращается в состояние возможного усиления из состояния генерирования энергии, крутящий момент Tm усиления постепенно изменяется до целевого значения (пример в этом случае представляет собой Vqnrm+ε или Vqnrm-ε). Поэтому усиление силы рулевого управления может быть восстановлено без возникновения у водителя неприятного ощущения ухудшения ощущения рулевого управления, которое может быть соответствующим образом предотвращено. Таким образом, в соответствии с примерным вариантом выполнения может быть соответствующим образом исключено ухудшение рабочих характеристик, когда место верхнего предельного значения напряжения приведения двигателя усилителя может быть соответствующим образом подавлено.
В частности, в этом примерном варианте выполнения пример, в котором участком 208B реле в устройстве 208 привода управляют с его размыканием (то есть в котором величина генерируемой энергии уменьшается до нуля) описан, как один пример “управления устройством привода для уменьшения количества генерируемой энергии” в изобретении. Однако режим уменьшения количества энергии, генерируемой двигателем 206 усилителя, не ограничивается этим. Например, количество энергии, генерируемой двигателем 206 усилителя, также может быть уменьшено путем управления количеством энергии, генерируемым в два этапа, с последовательным приращением (то есть за множество этапов) или непрерывно (то есть без использования деления на шаги), через, например, участок 208A схемы PWM.
Затем транспортное средство 20 в соответствии со вторым примерным вариантом выполнения изобретения будет описано со ссылкой на фиг.13, на которой схематично показана схема, концептуально поясняющая структуру транспортного средства 20. В частности, части на фиг.13, которые являются теми же, что и части на фиг.1, будут обозначены одинаковыми ссылочными позициями, и описание этих частей не будет повторяться.
Транспортное средство 20 в соответствии с этим вторым примерным вариантом выполнения, показанным на фиг.13, отличается от транспортного средства 10 в соответствии с первым примерным вариантом выполнения, показанным на фиг.1, тем, что в нем предусмотрено рулевое управление с переменным передаточным числом (РУППЧ) 500 на валу 203 с шестерней. РУППЧ 500 включает в себя двигатель РУППЧ, который не показан. Ротор этого двигателя РУППЧ закреплен на валу 203 с шестерней в его ближней части (то есть со стороны колеса 201 рулевого управления) двигателя 206 усилителя. РУППЧ 500 выполнено с возможностью непрерывного изменения отношения скорости вращения между валом 202 руля и валом 203 с шестерней (в основном, передаточное число рулевого управления, которое представляет собой отношение выходного угла рулевого управления к входному углу рулевого управления) путем увеличения или уменьшения, коррекции скорости вращения вала 203 с шестерней, используя выходной крутящий момент, генерируемый двигателем РУППЧ. Таким образом РУППЧ 500 представляет собой один пример устройства с переменным передаточным числом рулевого управления в соответствии с изобретением.
В частности, любое одно из различных устройств, либо известных, либо неизвестных, можно использовать как устройство рулевого управления с переменным передаточным числом, в соответствии с изобретением, если только оно выполнено с возможностью изменения передаточного числа рулевого управления, поэтому подробное описание этого устройства здесь будет исключено.
В структуре такого типа РУППЧ 500 выполнено таким образом, что двигатель РУППЧ и его устройство привода электрически соединены с ЭУМ 100. Обычно целевое значение передаточного числа рулевого управления определяют в соответствии с углом поворота колеса рулевого управления и привод двигателя РУППЧ выполняют таким образом, чтобы передаточное число рулевого управления соответствовало целевому значению.
В то же время скорость вращения вала 203 с шестерней имеет основную взаимосвязь от скорости ω вращения двигателя, которая представляет собой скорость вращения двигателя 206 усилителя (то есть даже если двигатель 206 усилителя соединен с валом 203 с шестерней через понижающую передачу, скорость вращения вала 203 с шестерней будет такой же, как и скорость ω вращения двигателя, за исключением передаточного числа). Поэтому условие, когда двигатель 206 усилителя находится в состоянии возможного усиления, описанном выше, определено в приведенном ниже Выражении (6).

где ωРУППЧ представляет собой скорость вращения РУППЧ 500, и ωрулевого вала представляет собой скорость вращения вала 202 руля. Таким образом, когда механизм изменения передаточного числа рулевого управления находится на стороне перед двигателем 206 усилителя, скорость вращения двигателя, предназначенного для поддержания двигателя 206 усилителя в состоянии возможного усиления, ограничена операцией на стороне РУППЧ. Другими словами, когда скорость ωРулевогоВала вращения вала 202 руля представляет собой верхнюю предельную скорость ω1 вращения, и скорость ω вращения двигателя увеличивается РУППЧ 500, двигатель 206 усилителя переходит в состояние генерирования энергии, и, как результат, ухудшаются характеристики управления.
Поэтому в данном примерном варианте выполнения, когда двигатель 206 усилителя находится в состоянии возможного усиления, ЭУМ 100 ограничивают диапазон управления передаточного числа рулевого управления с помощью РУППЧ 500 в соответствии со скоростью ω вращения двигателя. Таким образом, ЭУМ 100 выполняет функцию примера третьего устройства управления и устройства ограничения в соответствии с изобретением.
В это время в качестве одного предпочтительного режима управления ЭУМ 100 ограничивают диапазон управления передаточного числа рулевого управления таким образом, что величина ωРУППЧ коррекции удовлетворяет приведенному выше Выражению (6). В то же время, если двигатель 206 усилителя находится в состоянии генерирования энергии, и выполняют управление в соответствии с первым примерным вариантом выполнения, двигатель 206 усилителя переходит в состояние отсутствия привода таким образом, что реальное ограничение больше не будет установлено на операцию РУППЧ 500. В результате, может быть реализовано обычное управление передаточным числом в соответствии с углом поворота колеса рулевого управления.
Таким образом, в соответствии с данным примерным вариантом выполнения характеристики поворота транспортного средства 20 могут быть обеспечены как можно быстрее, при усилении силы рулевого управления в широком диапазоне так быстро, как это возможно, путем выполнения управления приводом двигателя РУППЧ, которое основано на крутящем моменте MT рулевого управления, когда двигатель 206 усилителя находится в состоянии генерирования энергии, и ограничении управления приводом РУППЧ, которое основано на крутящем моменте MT рулевого момента управления, в соответствии со скоростью ω вращения двигателя для двигателя 206 усилителя (или просто путем управления состоянием привода двигателя РУППЧ в соответствии со скоростью ω вращения двигателя 206 усилителя), когда двигатель 206 усилителя находится в состоянии возможного усиления.
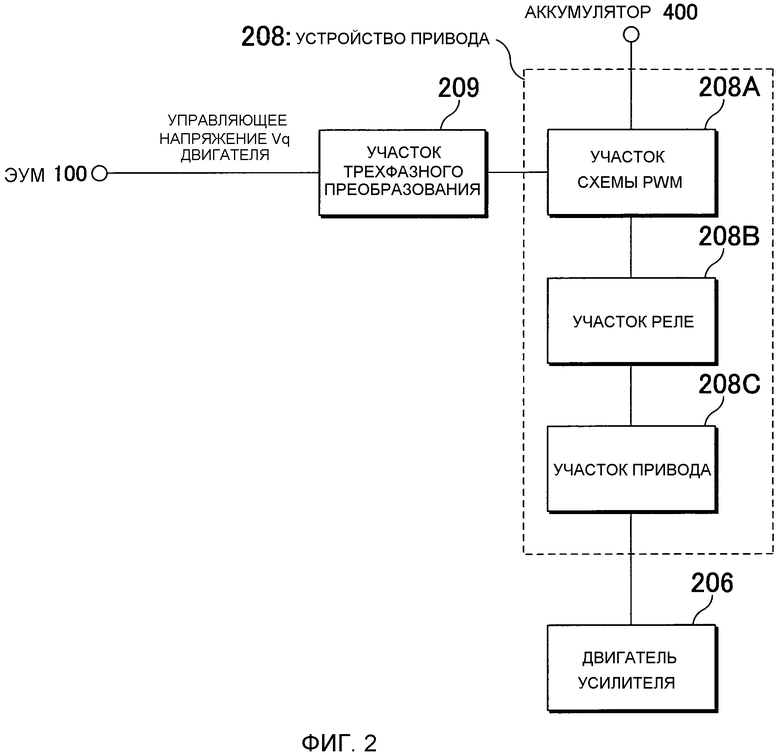
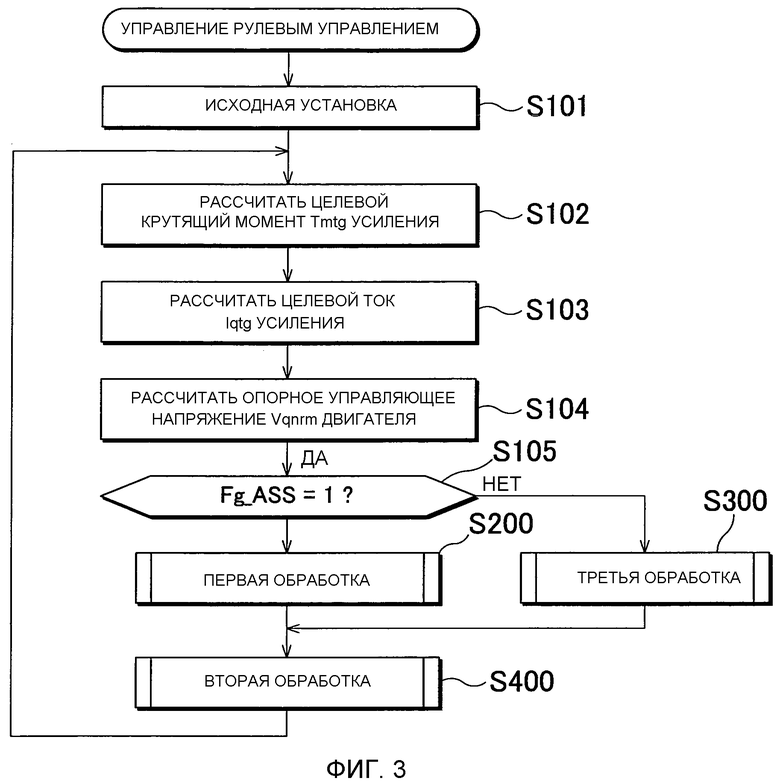
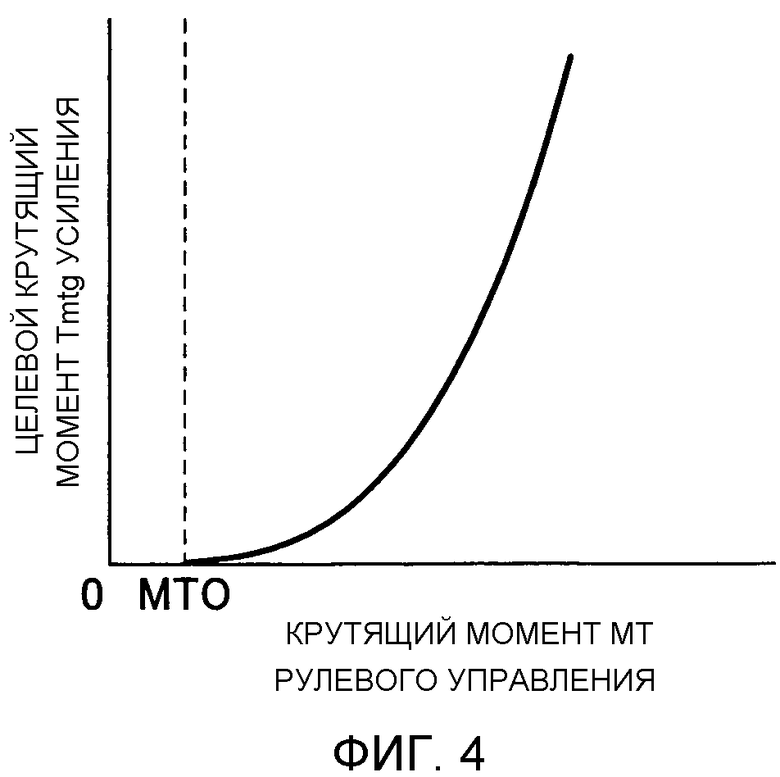
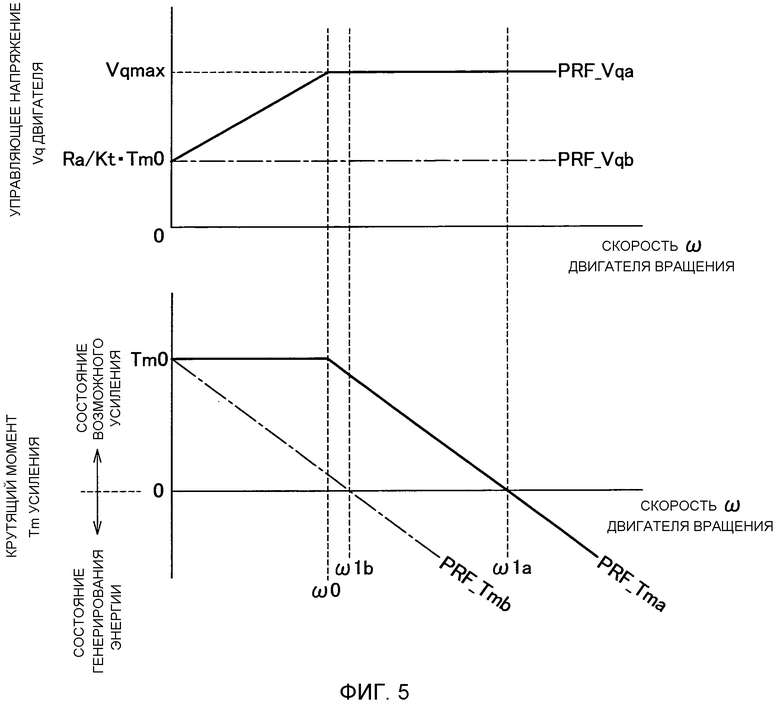
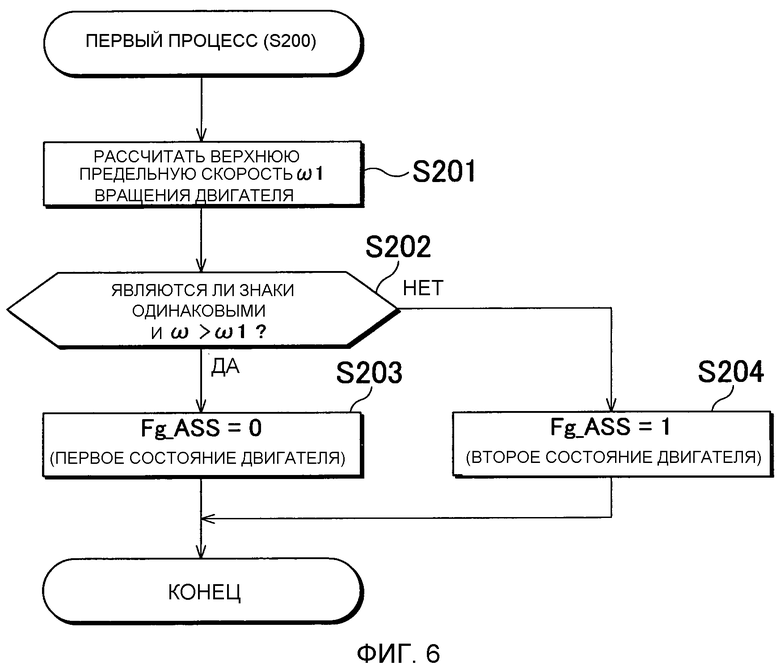
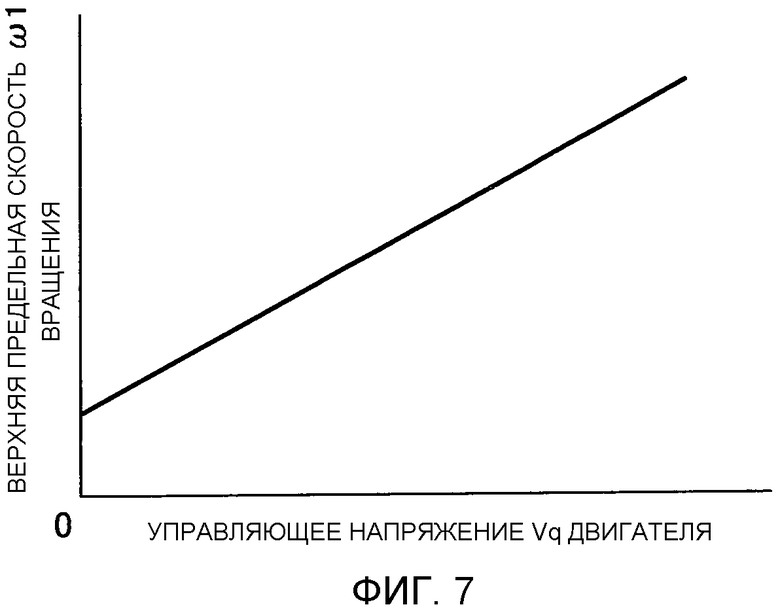
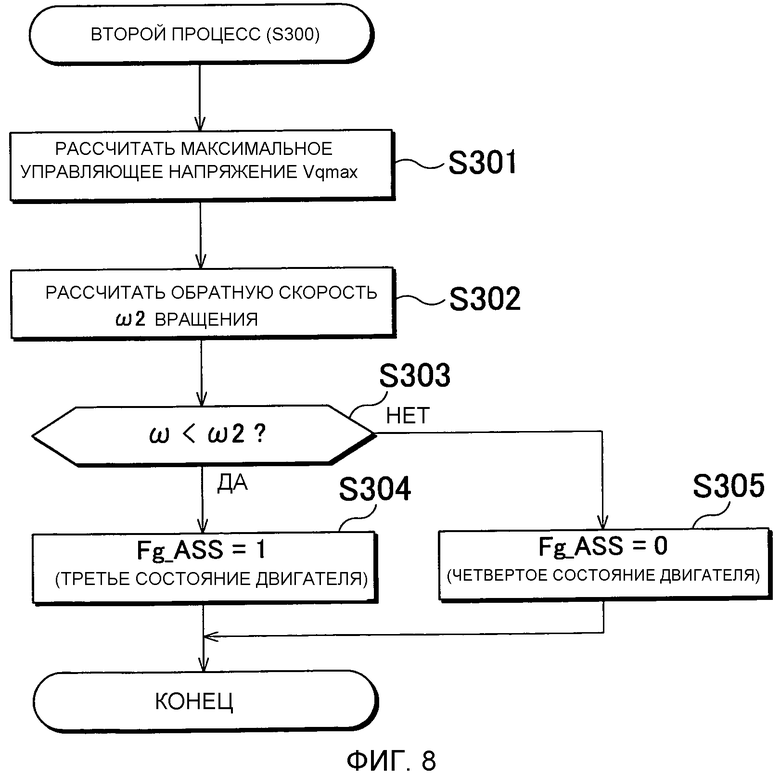
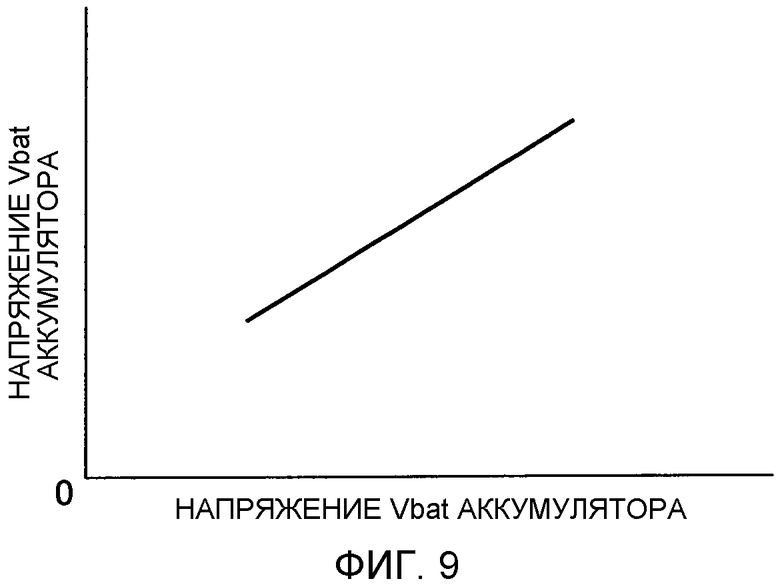

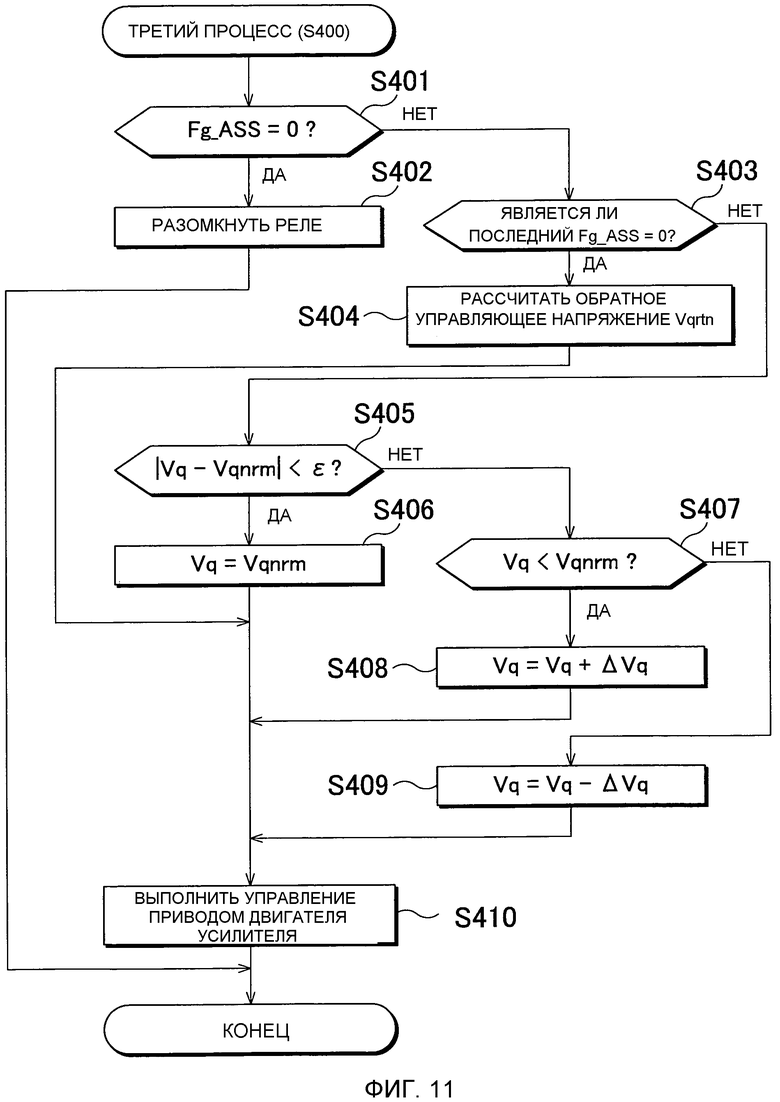

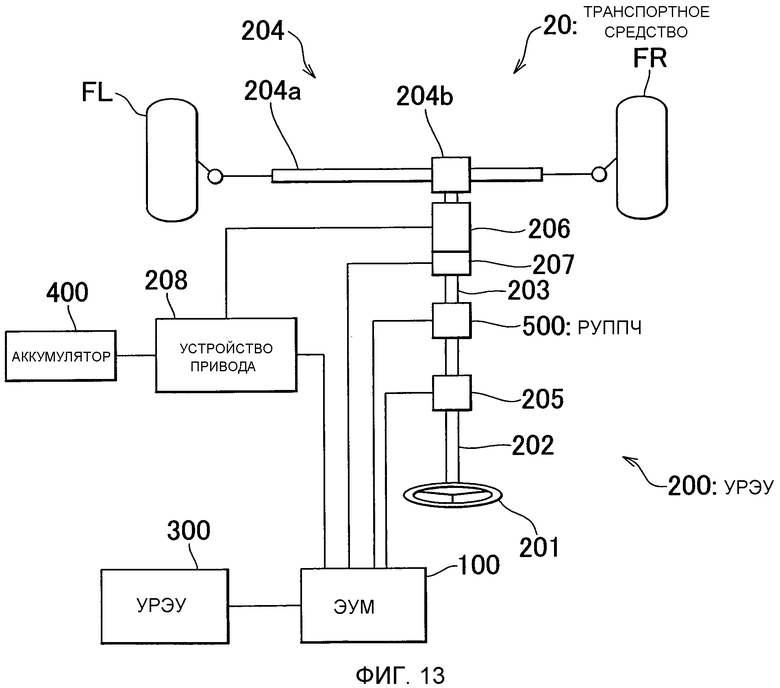
Устройство управления рулевым управлением содержит электрический усилитель (200), первое устройство управления, устройство определения, второе устройство управления. Электрический усилитель (200) содержит двигатель (206), выполненный с возможностью приложения крутящего момента усиления рулевого управления к валу руля (202). Напряжение приведения подают на двигатель (206) равным или меньше, чем заданное верхнее предельное напряжение. Определяют, находится ли двигатель (206) в состоянии, которое соответствует состоянию генерирования энергии на основе скорости вращения двигателя (206) и подаваемого напряжения приведения. Управляют устройством привода (208) для уменьшения количества энергии, генерируемой двигателем (206), когда двигатель (206) находится в состоянии генерирования энергии. Достигается повышение безопасности. 2 н. и 12 з.п. ф-лы, 13 ил.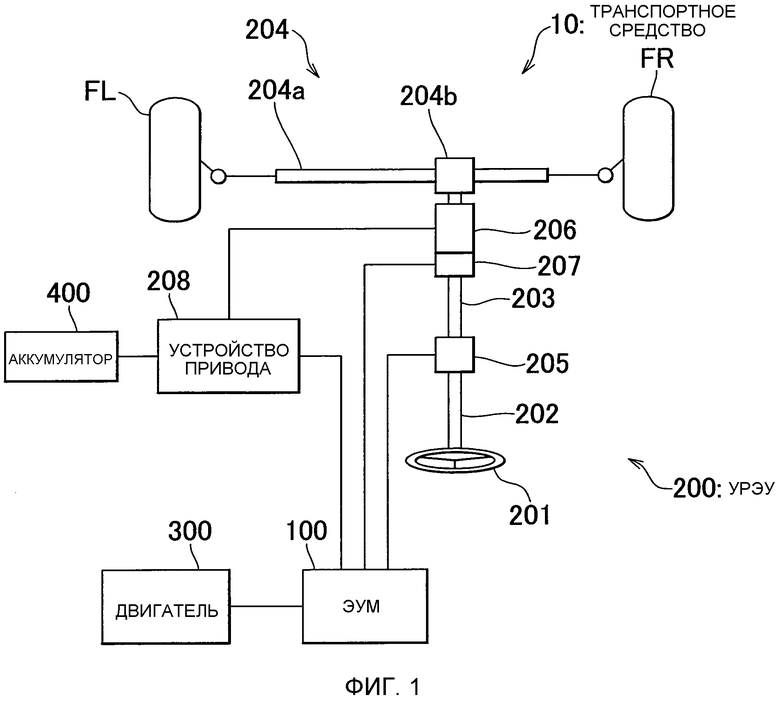
1. Устройство управления рулевым управлением для транспортного средства, в котором предусмотрено устройство рулевого управления с электрическим усилителем, имеющее двигатель, выполненный с возможностью приложения крутящего момента усиления рулевого управления к валу руля, и устройство привода, выполненное с возможностью привода двигателя путем подачи напряжения приведения в двигатель, отличающееся тем, что оно содержит: первое устройство управления, которое управляет устройством привода таким образом, что напряжение приведения подается, когда оно равно или меньше, чем заданное верхнее предельное напряжение, для приложения крутящего момента усиления рулевого управления, который основан на величине рулевого управления заданного вида, к валу руля; устройство определения, которое определяет, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, на основе скорости вращения двигателя и подаваемого напряжения приведения; и второе устройство управления, которое управляет устройством привода для уменьшения величины энергии, генерируемой двигателем, когда определяется, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии.
2. Устройство по п.1, отличающееся тем, что устройство определения определяет, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии путем сравнения i) верхней предельной скорости вращения, которая определяет верхний предел абсолютного значения скорости вращения двигателя, выполненного с возможностью приложения крутящего момента усиления рулевого управления, и который установлен на основе подаваемого напряжение приведения, с ii) абсолютным значением скорости вращения двигателя.
3. Устройство по п.1 или 2, отличающееся тем, что второе устройство управления управляет устройством привода таким образом, что подачу напряжения приведения прерывают, когда определяют, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии.
4. Устройство по п.1 или 2, отличающееся тем, что первое устройство управления постепенно изменяет крутящий момент усиления рулевого управления до целевого значения, когда состояние двигателя изменяется с состояния генерирования энергии на состояние возможного усиления, которое соответствует состоянию, отличающемуся от состояния генерирования энергии.
5. Устройство по п.4, отличающееся тем, что первое устройство управления управляет устройством привода таким образом, что исходное значение при постепенном изменении крутящего момента усиления рулевого управления становится равным нулю.
6. Устройство по п.1 или 2, отличающееся тем, что транспортное средство также имеет, по меньшей мере, устройство с переменным передаточным числом рулевого управления, которое выполнено с возможностью изменения передаточного числа рулевого управления, то есть отношения между входным углом рулевого управления и выходным углом рулевого управления, предусмотренное на стороне перед двигателем; и в устройстве управления рулевым управлением для транспортного средства предусмотрено третье устройство управления, которое управляет устройством переменного передаточного числа рулевого управления для изменения переменного передаточного числа рулевого управления в соответствии с величиной рулевого управления, и устройство ограничения, которое ограничивает диапазон управления передаточным числом рулевого управления в соответствии со скоростью вращения двигателя, когда определяется, что двигатель не находится в состоянии, которое соответствует состоянию генерирования энергии.
7. Устройство по п.6, отличающееся тем, что третье устройство управления ограничивает диапазон управления передаточным числом рулевого управления устройства с переменным передаточным числом рулевого управления таким образом, что скорость вращения двигателя становится равной или меньше, чем верхняя предельная скорость вращения.
8. Способ управления рулевым управлением для транспортного средства, в котором предусмотрено устройство рулевого управления с электрическим усилителем, имеющее двигатель, выполненный с возможностью приложения крутящего момента усиления рулевого управления к валу руля, и устройство привода, выполненное с возможностью привода двигателя путем подачи напряжения приведения к двигателю, отличающийся тем, что: управляют устройством привода таким образом, что напряжение приведения подают равным или меньше, чем заданное верхнее предельное напряжение, для подачи крутящего момента усиления рулевого управления, который основан на величине рулевого управления заданного вида, к валу руля; определяют, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, на основе скорости вращения двигателя и подаваемого напряжения приведения; и управляют устройством привода для уменьшения количества энергии, генерируемой двигателем, когда определяют, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии.
9. Способ по п.8, отличающийся тем, что дополнительно определяют, находится ли двигатель в состоянии, которое соответствует состоянию генерирования энергии, путем сравнения i) верхней предельной скорости вращения, которая определяет верхний предел абсолютного значения скорости вращения двигателя, выполненного с возможностью приложения крутящего момента усиления рулевого управления, и которая установлена на основе переданного напряжения приведения, с ii) абсолютным значением скорости вращения двигателя.
10. Способ по п.8 или 9, отличающийся тем, что дополнительно управляют устройством привода таким образом, что подачу напряжения приведения прерывают, когда определяют, что двигатель находится в состоянии, которое соответствует состоянию генерирования энергии.
11. Способ по п.8 или 9, отличающийся тем, что дополнительно постепенно изменяют крутящий момент усиления рулевого управления до целевого значения, когда состояние двигателя изменяется из состояния генерирования энергии в состояние возможного усиления, которое соответствует состоянию, отличающемуся от состояния генерирования энергии.
12. Способ по п.11, отличающийся тем, что дополнительно управляют устройством привода таким образом, что исходное значение при постепенном изменении крутящего момента усиления рулевого управления становится равным нулю.
13. Способ по п.8 или 9, отличающийся тем, что транспортное средство также имеет, по меньшей мере, устройство с переменным передаточным числом рулевого управления, которое выполнено с возможностью изменения передаточного числа рулевого управления, которое представляет собой отношение между входным углом рулевого управления и выходным углом рулевого управления, предусмотренным на стороне перед двигателем, при этом согласно способу: управляют устройством рулевого управления с переменным передаточным числом для изменения передаточного числа рулевого управления в соответствии с величиной рулевого управления; и ограничивают диапазон управления передаточного числа рулевого управления в соответствии со скоростью вращения двигателя, когда определяют, что двигатель не находится в состоянии, которое соответствует состоянию генерирования энергии.
14. Способ по п.13, отличающийся тем, что дополнительно ограничивают диапазон управления передаточного числа рулевого управления устройства с переменным передаточным числом рулевого управления таким образом, что скорость вращения двигателя становится равной или меньше, чем верхняя предельная скорость вращения.
| СПОСОБ ЭКСПЛУАТАЦИИ КОСМИЧЕСКОГО АППАРАТА ДЛЯ ВОССТАНОВЛЕНИЯ ОЗОНОВОГО СЛОЯ ЗЕМЛИ | 1994 |
|
RU2090494C1 |
| Червячная передача | 1985 |
|
SU1293413A1 |
| Источник постоянного опорного напряжения | 1976 |
|
SU599260A1 |
| Водоемный аппарат | 1933 |
|
SU36805A1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1539115A1 |
| Тормозное приспособление к катушкам проволочных брошюровочных машин | 1931 |
|
SU27042A1 |

