Изобретение относится к моделированию сложных систем и может быть использовано для динамической коррекции выходных сигналов систем с целью их модернизации или компенсации отклонений, а также воздействующих на систему возмущающих факторов или имитации нештатных (аварийных) ситуаций по информации о штатном функционировании объекта без нарушения существующих в системе связей.
Задача модернизации сложной системы решается, как правило, заменой отдельных блоков, составляющих систему, изменением связей между блоками. При этом неизбежны значительные затраты времени и средств на модернизацию, поскольку для каждой системы приходится производить разработку и изготовление новых блоков и узлов, изменение связей в системе, пуско-наладочные работы. В ряде случаев подобная модернизация невозможна из-за отсутствия достаточной документации разработчика на входящие в систему узлы и блоки. Таким образом, для большинства эксплуатируемых и устаревающих сложных систем, с одной стороны, остро стоит задача улучшения их характеристик, например расширения динамического диапазона, повышения линейности, компенсации отдельных составляющих погрешности, а с другой стороны модернизация путем замены блоков и внутренних связей невозможна по организационным, временным или стоимостным показателям.
Известен способ коррекции сложных систем, включающий сбор сигналов от отдельных узлов и блоков системы, моделирование развития ситуации и выработку команд на устранение или компенсацию неисправности (см. патент РФ №2017630, В60K 35/00, 1991.05.07).
Недостатком данного способа являются ограниченные функциональные возможности: способ предполагает постоянное присутствие оператора, выполняющего команды и применим только в аварийных ситуациях.
Наиболее близким к предложенному является способ коррекции сложных систем по патенту РФ №2263942 (G05B 17/00, 2003.03.12), в котором к выходу системы последовательно подключают блок компенсации в виде математической или физической модели и набора математических или физических моделей реального и виртуального (желаемого) регуляторов (в прямой цепи и в цепи обратной связи модели).
Блок коррекции для осуществления известного способа содержит параллельные первый виртуальный и реальный регуляторы, подключенные через последовательные первый и второй сумматоры ко входу модели, в цепи обратной связи которой установлен второй виртуальный регулятор, и третий сумматор, первый вход которого соединен со входом блока компенсации, второй вход - с выходом модели, а выход - с выходом блока компенсации.
При этом предполагается, что модели функционирования динамического объекта, охваченного в системе обратной связью, и динамических (или статических) регуляторов, реализующих, во-первых, реально существующие, а во-вторых, желаемые обратные связи, известны и доступны для воспроизведения на соответствующих вычислительных устройствах или физически подобных устройствах. Характерными примерами использования данного изобретения являются: выделение вынужденной (обусловленной внешними воздействиями) составляющей выходного сигнала измерительной системы на фоне не затухшей или слишком медленно затухающей свободной (обусловленной ненулевыми начальными условиями) составляющей этого сигнала; осуществляемая в методических или исследовательских целях имитация на тренажерах или моделирующих стендах поведения динамических систем в условиях нештатного функционирования средств автоматики и/или ошибочных действий персонала на режимах с располагаемыми записями нормального (штатного) функционирования реальных систем.
Однако эффективность данного способа ограничена, поскольку способ предполагает использование лишь посткомпенсатора, коррекцию только выходного сигнала системы, а оперирование выходным сигналом далеко не во всех случаях позволяет модифицировать начальные характеристики системы, произведя модернизацию. Кроме того, подключение модели на выход системы в ряде случаев может привести к нежелательному изменению ее параметров. Более того, далеко не во всех случаях модель системы настолько разработана, что адекватно отражает поведение системы во всех эксплуатационных режимах. И, наконец, в ряде систем их выход недоступен или сигнал на выходе имеет вид, непригодный для использования посткомпенсатора.
Кроме того, устройство для осуществления данного способа конструктивно представляет собой электронный блок, который должен быть установлен среди блоков модернизируемой системы. Это возможно в лабораторных условиях, но в промышленных условиях, на борту судна или самолета это сопряжено с неприемлемыми трудностями и доработками. Следует отметить также, что введение модели в состав блока компенсации приводит к его значительному усложнению применительно к коррекции сложных систем.
Техническим результатом, ожидаемым от использования изобретения, является повышение эффективности способа и расширение его области применения. Кроме того, в предложении решается задача упрощения и повышения удобства использования технических средств, используемых для модернизации сложных систем.
Указанный результат достигается тем, что в способе коррекции сложных систем, включающем введение блока коррекции в цепь системы, в корректируемой системе выделяют блоки с неудовлетворительной выходной характеристикой и минимальным набором выходных сигналов, производят сопоставление их выходных характеристик с заданными, по результатам сопоставления формируют переходную характеристику блока коррекции, а введение блока коррекций осуществляют путем включения компенсаторов в информационные каналы, соединяющие блоки с неудовлетворительной выходной характеристикой и минимальным набором выходных сигналов с последующими блоками.
Кроме того, компенсатор для осуществления способа может быть выполнен в виде цилиндрического корпуса с торцевыми разъемными соединителями, между которыми включен последовательный преобразователь выходного сигнала блока с неудовлетворительной выходной характеристикой в заданный.
Таким образом, основными отличиями предложенного решения являются следующие:
1. Не требуется физическое включение модели в состав корректируемой системы. Идеальная модель в виде заданных (или требуемых) характеристик и параметров системы применяется лишь при выделении модернизируемых или поврежденных блоков и определении характеристики и структуры компенсатора.
2. Коррекция параметров и характеристик в общем случае производится не для системы в целом, а для отдельных ее блоков.
3. Коррекция в общем случае производится не путем суммирования сигналов, а введением в канал передачи последовательного преобразователя.
4. Точки подключения компенсаторов выбираются так, что сохраняется штатное расположение блоков поврежденной системы, ее габариты или габариты составляющих ее узлов и блоков не меняются, не требуются дополнительные установочные места.
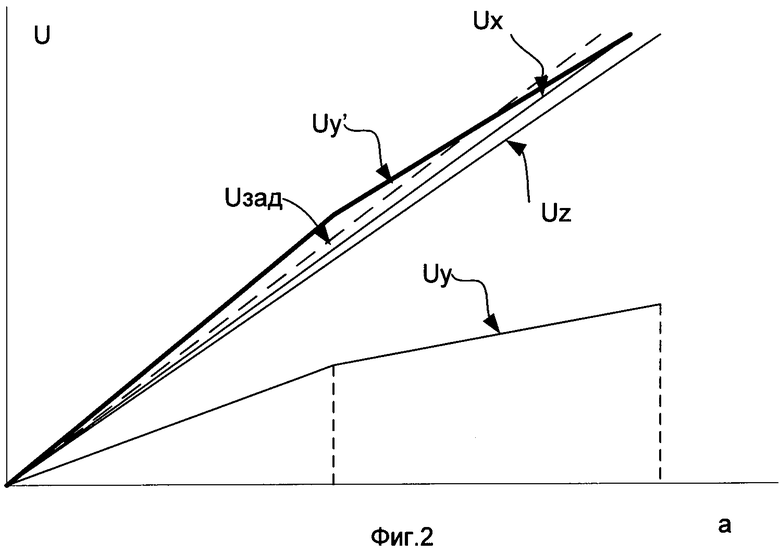
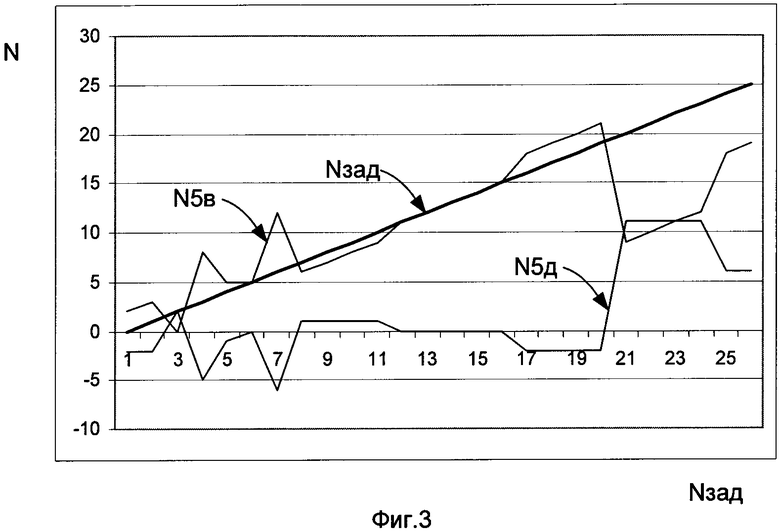
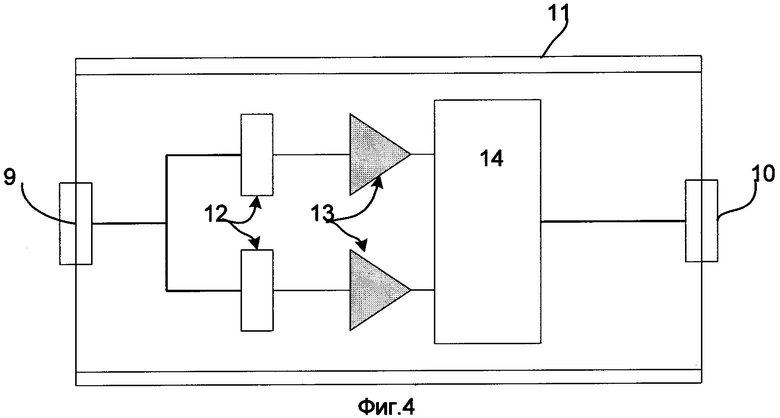
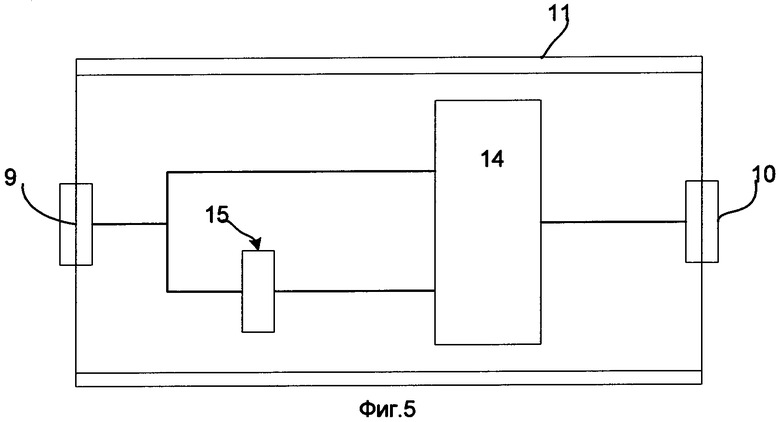
На фиг.1, в качестве примера осуществления способа, приведена блок-схема инерциальной навигационной системы. На фиг.2 приведены выходные характеристики блока инерциальных измерителей по ускорению, а на фиг.3 - выходные коды блока начальной информации. Конструктивное выполнение компенсаторов 7, 8 показано на фиг.4-6.
Система, изображенная на фиг.1, содержит блок 1 инерциальных измерителей и построителей направлений в пространстве (акселерометры и гироскопические устройства), посредством которого реализуется заданная ориентация измерительных осей и с которого выдается измерительная информация в вычислительный блок 2, в котором осуществляются интегрирование основного уравнения, вычисление необходимых параметров движения, формирование сигналов управления ориентацией инерциальных измерителей и сигналов компенсации систематических погрешностей (ускорения тяготения, поворотного ускорения, от несферичности Земли и др.), блок 3 времени, из которого в блоки 1, 2, 4 поступают сигналы мирового времени, блок 4 ввода начальной информации в блоки 1 и 2 для ориентации инерциальных измерителей и интегрирования основного уравнения; блок 5 начальной информации и блок 6 выдачи конечной информации о параметрах движения. Стрелками показаны направления поступления информации по соответствующим каналам (линиям связи). Позициями 7, 8 обозначены компенсаторы на выходах блоков 1, 5 соответственно.
Компенсатор 7, пример выполнения которого показан на фиг.4, содержит входной и выходной торцевые разъемные соединители, закрепленные в цилиндрическом корпусе 11. Соединитель 9 подключен к входам ограничителей напряжения 12, которые через усилители напряжения 13 соединены со входами сумматора 14, выход которого подключен к соединителю 10. Компенсатор 8 (фиг.5) содержит последовательно соединенные дешифратор 15 и сумматор 14, второй выход которого соединен со входом дешифратора 15 и соединителем 9. Выход сумматора 14 подключен к соединителю 10.
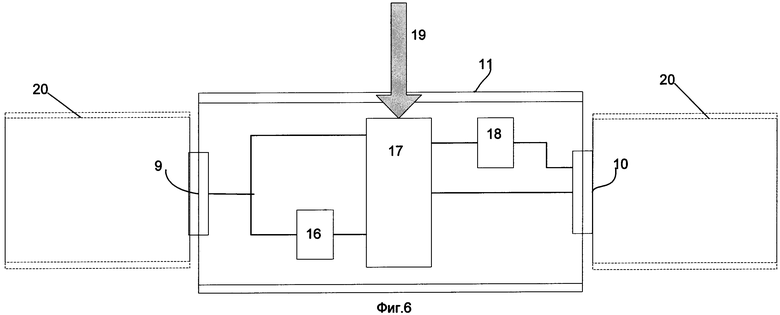
Технически реализовать компенсаторы 7, 8 можно также в виде универсального цифрового блока, выполненного, как показано на фиг.6., в виде последовательно соединенных аналого-цифрового преобразователя 16, микропроцессора 17 и цифроаналогового преобразователя 18, при этом аналоговый выход соединителя 9 подключен к входу преобразователя 16, а цифровой - к входу микропроцессора 17, выход которого подключен также к входу соединителя 10. Микропроцессор 17 снабжен также шиной управления 19. Соединителями 9, 10 компенсатор 7 или 8 включен в разрыв информационного канала (линии связи, сигнального кабеля, «жгута» проводников) 20 и тем самым в большинстве случаев не требует сопряжения с существующими в модернизируемой системе конструктивами электронных блоков, существенно облегчая как процесс модернизации, так и его документирование. Таким образом, в качестве компенсатора может применяться сложное процессорное устройство с алгоритмами цифровой обработки сигналов, включая различные методы фильтрации, линеаризацию и т.п.
Конструктивно компенсаторы 7, 8 выполняют в виде врезки в кабельную линию или жгут проводов (информационный канал 20). Для этого их разрезают, вставляют разъемные соединители, ответные тем, что установлены на компенсаторе (9, 10) и затем подключают компенсатор в разрыв канала 20, обеспечив соответствующий крепеж (например, бандажем к общему гнезду кабелей) для устойчивости к вибрации и т.п. По климатическому исполнению компенсатор должен соответствовать остальным блокам системы, а одним из задействованных кабелей должен быть кабель резервного или иного питания, имеющего требуемый запас по мощности (подтверждается несложными измерениями на эквивалентной нагрузке во всех предельных режимах работы модернизиреумого изделия). При отсутствии подходящего кабеля питания в жгуте может быть организован съем мощности (в том числе индуктивный) с какого-либо тактового сигнала или цифровой шины обмена, имеющих соответствующий резерв по нагрузке.
Рассмотрим несколько возможных вариантов модернизации системы и поясним осуществление предлагаемого способа на их примере. Пусть в результате разброса параметров операционного усилителя по одной из осей трехосного акселерометра блока 1, например Y, соответствующие выходные характеристики блока 1 имеют вид, показанный на фиг.2, где обозначено а - ускорение, Ux,y,z - выходной сигнал акселерометра по соответствующей оси, Uзад - заданная характеристика. Как видно из фиг.2, недостаток блока 1 заключается в том, что характеристика Uy существенно нелинейна и коэффициент передачи по данной оси значительно отличается от коэффициента передачи по двум другим. Это может быть следствием того, что требования к выходным параметрам блока 1 возросли, так что система в целом и блок 1 в частности нуждаются в модернизации.
Пусть также выходной код блока 5 имеет вид, показанный на фиг.3, где Nзад - заданное, т.е. требуемое значение начальной информации, N5в - выходной код блока 5, N5д - дополнительный код, такой что N5a+N5д=Nзад.
При выделении блоков с неудовлетворительной выходной характеристикой и минимальным набором выходных сигналов учитывают еще два фактора: конструктивное расположение и ремонтопригодность. Конструктивно акселерометр и его выходные усилители размещены в блоке 1, который расположен на стабилизированной платформе и заключен в отдельный корпус. Таким образом, и расположение блока 1, и наличие у него отдельного корпуса, соединенного небольшим числом линий связи с другими блоками системы, указывают на то, что данный блок следует отнести к малодоступным неремонтопригодным блокам, требующим модернизации. Следует отметить и то обстоятельство, что в ЗИП системы не включены чувствительный элемент блока 1 или его выходной усилитель, так что блок 1 следует отнести к неремонтопригодным в полевых условиях. Установка же компенсатора 7 на его выходе позволяет получить требуемую выходную характеристику блока 1 и, таким образом, произвести модернизацию системы.
Разумеется, разбиение сложной системы на блоки с неудовлетворительной характеристикой, неремонтопригодные и малодоступные блоки, на выходе которых наиболее целесообразно установить компенсатор, может быть выполнено несколькими способами, однако это не исключает, как явствует из дальнейшего изложения, возможности однозначной реализации предложенного способа. Во всяком случае, если осуществление способа при первом разбиении системы на такие блоки не позволило устранить неисправность полностью или частично, производят повторное разбиение, выделяя требующие коррекции блоки иного функционального назначения или более мелкие и т.д. Более того, при выделении блоков, выходная характеристика которых должна быть скорректирована, может применяться метод математического моделирования, позволяющий предсказать поведение системы при том или ином изменении выходных параметров составляющих ее блоков.
Важным преимуществом предлагаемого способа является также то, что при необходимости возможен мгновенный возврат к состоянию до модернизации или коррекции, а также осуществление коррекции только в отдельных режимах (с применением сответствующего переключателя).
Очевидно также, что откорректировать сигнал ускорения по одной из осей можно на выходе акселерометра, а можно в десятках точек, где этот сигнал используется при расчетах в цифровом или аналоговом виде. Оба действия приведут примерно к одному результату с точки зрения точности коррекции, но сложность технической реализации во втором случая неизмеримо выше. Именно поэтому производят поиск не просто блоков с неудовлетворительной характеристикой, но и с минимальным набором выходных сигналов, т.е. «раньше» по ходу вычислений или обработки сигнала.
Сопоставление характеристик выделенных блоков с заданными производится при воздействии на вход блока сначала рабочего, а затем, если его диапазон недостаточен для выявления недостатков переходной характеристики блока или характера неисправности, - тестового сигнала. Для этого входы выделенного блока отключают от выходов предшествующего и подают на них тестовые сигналы от соответствующих источников или, в случае задания сигналов или кодов с панели или пульта, - вручную. При этом предполагается, что оператору известен заданный вид характеристики выделенного блока из его описания или описания системы.
Выполнение операций выделения блоков с неудовлетворительной выходной характеристикой и сопоставления их характеристик с заданными, в рассматриваемом примере, приведет к выявлению двух блоков - 1 и 5, требующих коррекции выходных характеристик. Далее, с целью компенсации отклонений выходных характеристик блоков 1 и 5, в разрыв соединительных линий (каналов) вводят компенсаторы 7, 8 (фиг.1). Компенсатор 7 переводит характеристику Uy в Uy' (фиг.2), приближая ее к Uзад. Компенсатор 8 производит преобразование кода N5a в код Н5д и суммирование этих кодов, так что на его выходе присутствует код N5зад.
Технически реализовать компенсаторы 7, 8 можно в виде универсального цифрового блока, выполненного, как показано на фиг.6. В этом случае подлежащий компенсации аналоговый сигнал проходит через соединитель 9 и преобразователь 16 на вход микропроцессора 17, где подвергается обработке в соответствии с алгоритмом, заданным управляющими кодами на шине 19. Затем выходной код микропроцессора 17 вновь преобразуется в аналоговый вид преобразователем 18 и поступает на соединитель 10. Если компенсации подлежит цифровой сигнал, он с соединителя 9 поступает непосредственно на вход микропроцессора 17, выходной код которого подается на соединитель 10. Алгоритм преобразования также задается кодом на шине 19.
Помимо рассмотренных выше примеров модернизации, коррекции или компенсации неисправностей предложенный способ может применяться для компенсации погрешностей, устранения нелинейностей характеристик, расширения динамического диапазона и т.п. Применение способа позволяет обеспечить улучшение эксплуатационных характеристик сложных систем, обеспечить работоспособность сложных систем в полевых условиях, значительно продлить их срок службы и повысить надежность. При этом модернизация осуществляется без нарушения или изменения внутренних связей корректируемой системы, что позволяет обойтись без существенной корректировки эксплуатационной документации (необходимость корректировки документации зачастую является работой, сопоставимой по объему с самой модернизацией) дополнительного обучения операторов - поскольку фактически не изменяются никакие органы управления. В большинстве случаев достаточно в уведомительном порядке (извещением и п.т.) ввести в состав модернизируемого изделия дополнительный кабель (жгут) со встроенным компенсатором (или комплект кабелей и компенсатор) с указанием заменяемых при этом кабелей, точки крепления бандажа и пр.
В свою очередь, создание компенсатора с заданной характеристикой является сравнительно легко решаемой (и в короткие сроки) задачей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ОПТИМАЛЬНОЙ ОЦЕНКИ ИСКАЖЕНИЙ ПЕРЕДАЮЩЕЙ СРЕДЫ, ВКЛЮЧАЮЩИЙ ПОСЛЕДОВАТЕЛЬНОЕ ГЕНЕРИРОВАНИЕ ПАР КВАДРАТУРНЫХ КОМПЛЕМЕНТАРНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2005 |
|
RU2392762C2 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| СПОСОБЫ МОДУЛИРОВАНИЯ ПОДСВЕТКИ ПРИ ПОМОЩИ СОПОСТАВЛЕНИЯ С ХАРАКТЕРИСТИКАМИ ИЗОБРАЖЕНИЯ | 2008 |
|
RU2450475C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| Инерциальный измерительный преобразователь | 2024 |
|
RU2821240C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| СПОСОБ ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ УГЛА | 2012 |
|
RU2488958C1 |
| УСТРОЙСТВО МНОГОКАНАЛЬНОЙ АДАПТИВНОЙ КОМПЕНСАЦИИ ЭХО-СИГНАЛОВ | 2019 |
|
RU2722220C1 |
| СПОСОБ И СИСТЕМА ДЛЯ НАСТРОЙКИ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2667667C2 |
Изобретение относится к динамической коррекции выходных сигналов систем с целью компенсации возникших в ходе их эксплуатации повреждений, а также воздействующих на систему возмущающих факторов или имитации нештатных (аварийных) ситуаций по информации о штатном функционировании объекта. Технический результат заключается в повышении эффективности способа модернизации сложных систем в полевых или лабораторных условиях за счет использования компенсаторов, включаемых в разрыв информационных каналов, соединяющих блоки системы. Он достигается тем, что в системе выбирают конструктивные блоки с неудовлетворительной выходной характеристикой и наименьшим возможным набором выходных сигналов, производят сопоставление их выходных характеристик с заданными, по результатам сопоставления определяют переходную характеристику компенсаторов из условия приведения характеристики конструктивных блоков с неудовлетворительной выходной характеристикой к заданным, после чего включают компенсаторы в разрыв информационных каналов, соединяющих конструктивные блоки с неудовлетворительной выходной характеристикой и наименьшим возможным набором выходных сигналов с последующими блоками. 6 ил.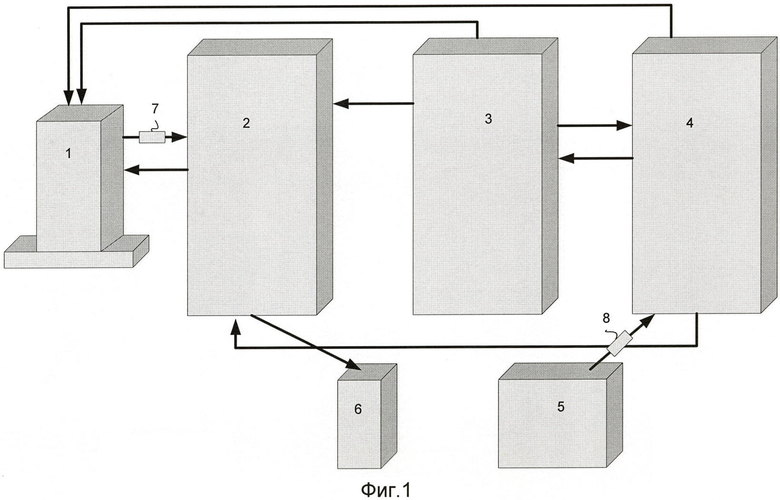
Способ модернизации сложных систем в полевых или лабораторных условиях путем корректировки выходной характеристики системы, отличающийся тем, что в системе выбирают конструктивные блоки с неудовлетворительной выходной характеристикой и наименьшим возможным набором выходных сигналов, производят сопоставление их выходных характеристик с заданными, по результатам сопоставления определяют переходную характеристику компенсаторов из условия приведения характеристики конструктивных блоков с неудовлетворительной выходной характеристикой к заданным, после чего включают компенсаторы в разрыв информационных каналов, соединяющих конструктивные блоки с неудовлетворительной выходной характеристикой и наименьшим возможным набором выходных сигналов с последующими блоками.
| RU 2008104473 А, 10.08.2009 | |||
| US 4145929 А, 27.03.1979 | |||
| ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2006 |
|
RU2329467C1 |
| УСТРОЙСТВО ДИНАМИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ОБРАТНОЙ СВЯЗИ ФИЗИЧЕСКОЙ ДИНАМИЧЕСКОЙ СИСТЕМЫ НА ЕЕ ВЫХОДНЫЕ СИГНАЛЫ | 2003 |
|
RU2263942C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ НЕИСПРАВНОСТЕЙ АВАРИЙНО-СПАСАТЕЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2017630C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2323136C2 |

