Изобретение относится к устройствам для моделирования различных физических динамических систем, которые характеризуются протекающими в них сложными процессами и явлениями, и может быть использовано в устройствах динамической коррекции выходных сигналов физических динамических систем, заключающейся в изменении соотношения составных частей наблюдаемого сигнала, прежде всего, его поврежденной и свободной составляющих, и может найти применение в системах измерения слабых геофизических полей земли в интересах навигации, картографии, разведки и поиска полезных ископаемых и т.п., а также в моделирующих стендах и тренажерах персонала для имитации нештатных (аварийных) ситуаций по информации о штатном функционировании объекта.
Известно компенсационное устройство для измерения параметров четырехполюсников, описанное в авторском свидетельстве СССР №478257, кл. G 01 R 17/06, 1975 г. Оно предназначено для определения амплитудно- и фазо-частотных характеристик четырехполюсников и позволяет повысить точность измерений, однако не позволяет корректировать выходные сигналы измеряемой системы, что не дает возможность оценить изменение соотношения составных частей анализируемых (наблюдаемых) сигналов в различных системах.
Также известен динамический компенсатор контура, описанный в патенте США №5646513, кл. Н 02 М 3/335, 1997 г. Данное устройство содержит цифровой контроллер, в котором используются три компенсационных алгоритма, учитывающие динамические изменения при компенсации критических физических процессов, протекающих в сложных энергетических цепях. Однако данное устройство также не позволяет корректировать выходные сигналы измеряемой системы, что не дает возможность оценить изменение соотношения составных частей анализируемых (наблюдаемых) сигналов в различных системах.
Заявителю не известны из уровня техники, т.е. из доступных патентных и литературных источников информации, сведения об аналогичных технических решениях того же назначения, что и предлагаемое техническое решение.
Задачей данного технического решения является оценка изменения соотношения составных частей анализируемых (наблюдаемых) сигналов в различных системах. Решение данной задачи предусматривает получение технического результата, заключающегося в наблюдении выходных сигналов физической динамической системы, не изменяющихся при изменении свойств динамических обратных связей внутри данной физической динамической системы.
В связи с изложенным предлагаемое техническое решение - устройство динамической компенсации влияния обратной связи физической динамической системы на ее выходные сигналы - характеризуется тем, что содержит, по меньшей мере, один блок моделирования виртуального регулятора обратной связи с изменяемыми характеристиками физической динамической системы, по меньшей мере, один блок моделирования реального регулятора обратной связи физической динамической системы и блок суммирования сигналов, входной и выходной сумматоры, блок математического моделирования физической динамической системы и, по меньшей мере, один блок моделирования виртуальной обратной связи с изменяемыми характеристиками, используемой в физической динамической системе, вход, по меньшей мере, одного блока моделирования виртуального регулятора обратной связи с изменяемыми характеристиками физической динамической системы и вход, по меньшей мере, одного блока моделирования реального регулятора обратной связи физической динамической системы связаны с первым входом выходного сумматора, при этом выходы, по меньшей мере, одного блока моделирования виртуального регулятора обратной связи с изменяемыми характеристиками физической динамической системы и, по меньшей мере, одного блока моделирования реального регулятора обратной связи физической динамической системы соединены с соответствующими входами блока суммирования сигналов, соединенного выходом с первым входом входного сумматора, второй вход которого подключен к выходу блока моделирования виртуальной обратной связи с изменяемыми характеристиками, используемой в физической динамической системе, выход входного сумматора через блок математического моделирования физической динамической системы связан со входом блока моделирования виртуальной обратной связи с изменяемыми характеристиками, используемой в физической динамической системе, и вторым входом выходного сумматора.
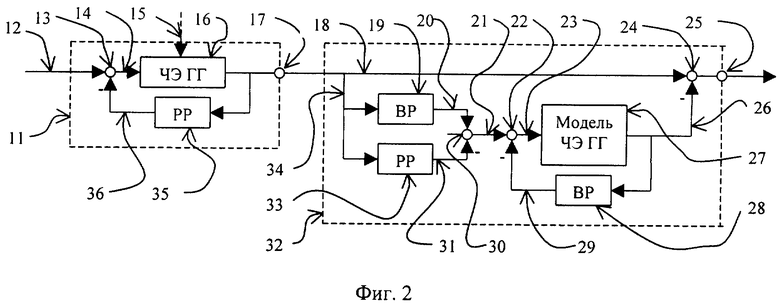
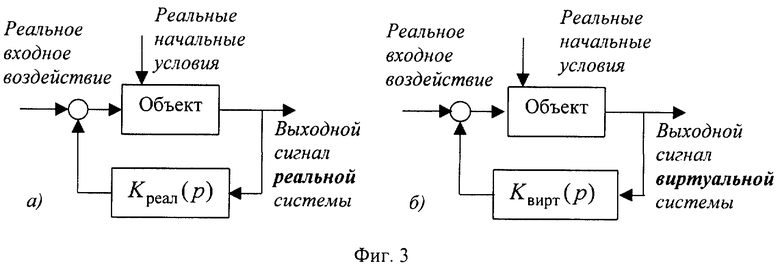
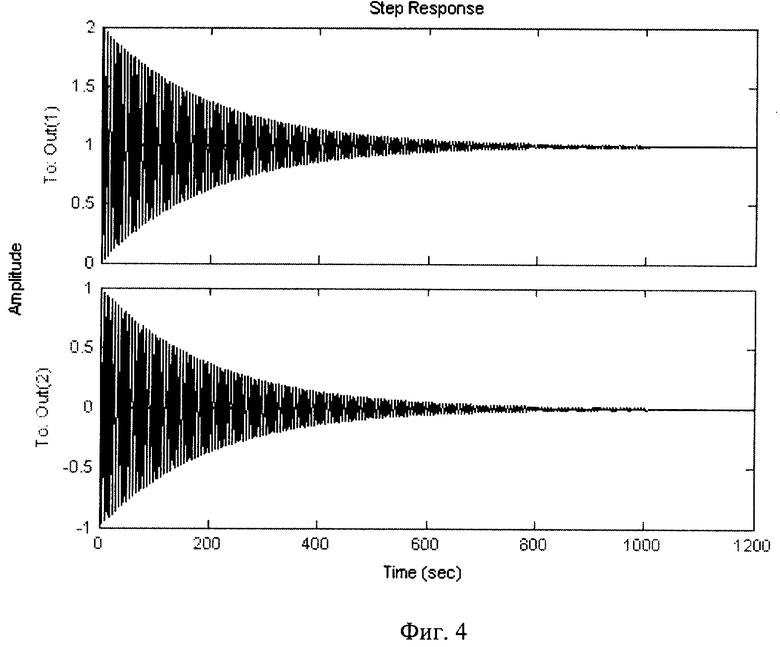
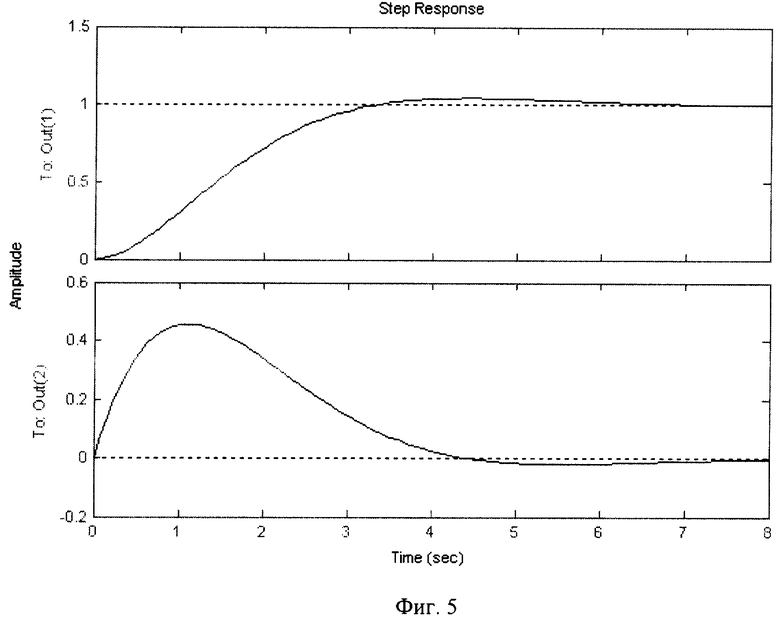
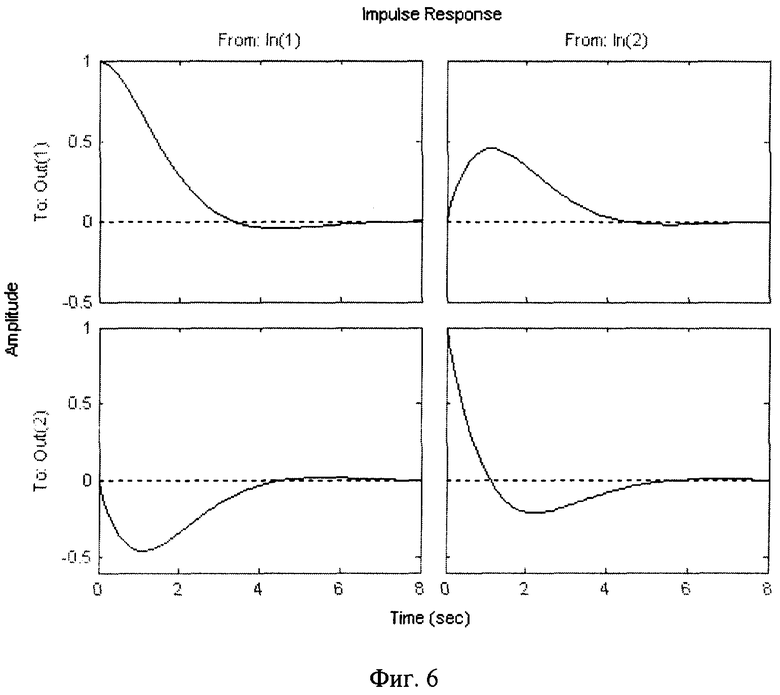
Сущность изобретения поясняется чертежами, где на фиг.1 показана блок-схема устройства; на фиг.2 показана структура наблюдаемой системы с устройством динамической компенсации (посткомпенсации) влияния обратной связи динамической системы на ее выходные сигналы; на фиг.3 показаны структуры реальной (а) и виртуальной (б) систем; на фиг.4 показаны графики переходных процессов измерения ступенчато нарастающего ускорения (здесь Out(1) - изменение координаты положения пробного тела, Out(2) - изменение скорости положения пробного тела); на фиг.5 приведен график устройства при ступенчатом нарастающем ускорении; на фиг.6 показан график устройства на ненулевые начальные условия (здесь In(1) - ненулевые начальные условия по координате положения пробного тела, In(2) - ненулевые начальные условия по скорости изменения положения пробного тела).
На фиг.1 обозначены блок 1 моделирования виртуального регулятора обратной связи с изменяемыми характеристиками физической динамической системы, блок 2 моделирования реального регулятора обратной связи физической динамической системы, блок 3 суммирования сигналов, входной сумматор 4, блок 5 математического моделирования физической динамической системы, блок 6 моделирования виртуальной обратной связи с изменяемыми характеристиками, используемого в физической динамической системе, и выходной сумматор 7, а также соединение 8 между блоком 3 суммирования сигналов и входным сумматором 4, соединение 9 между блоком 5 и выходным сумматором 7, который цепью 10 передачи сигнала подключен ко входам блоков 1 и 2.
На фиг.2 обозначен измеряемый сигнал 12, сумматор 13, вход 14 прибора, плоскость 15 вращения зонда прибора, чувствительный элемент 16 гравиградиентометра, выходной сигнал 17 прибора, цепь 18 передачи сигнала, модель 19 виртуального регулятора (выполняет функцию блока 1 моделирования виртуального регулятора обратной связи), передающая цепь 20, сигнал 21, входной сумматор 22, передающая цепь 23, выходной сумматор 24, выходной итоговый сигнал 25, цепь 26 формирования оценки, модель 27 чувствительного элемента гравиградиентометра (выполняет функцию блока 5 математического моделирования физической динамической системы), виртуальная обратная связь 28 (выполняет функцию блока 6 моделирования виртуальной обратной связи), передающая цепь 29, сумматор 30, передающая цепь 31, устройство 32 динамической компенсации влияния обратной связи физической динамической системы на ее выходные сигналы, модель 33 реального регулятора (выполняет функцию блока 2 моделирования реального регулятора обратной связи), передающая цепь 34, модель 35 обратной связи, передающая цепь 36, структура 11 гравиградиентометра.
Принцип работы данного устройства заключается в следующем.
К выходу системы, представляющей собой замкнутый контур из динамического объекта в прямой цепи и динамического регулятора в обратной цепи, подключается последовательно некоторый динамический фильтр, называемый посткомпенсатором. В результате соединению наблюдаемой системы и фильтра придаются новые динамические свойства, заключающиеся в том, что наблюдаемый выходной сигнал динамической системы изменяется таким образом, как если бы он наблюдался на выходе того же объекта, но с другой (по желанию) динамической обратной связью.
Указанное изменение динамических свойств может, например, сводиться к выделению из суммарного выходного сигнала динамического объекта какой-либо одной из составляющих этого сигнала. В частности, речь идет о подавлении свободной составляющей процесса на выходе объекта, обусловленной ненулевыми начальными условиями, и сохранении вынужденной составляющей этого же процесса, вызванной влиянием неизмеряемого входного сигнала.
Выходной сигнал некоторой наблюдаемой динамической системы, например, механического измерительного устройства с чувствительным элементом, настроенным на восприятие слабого потенциального силового поля, включает две составляющие, одна из которых обусловлена внешним воздействием и содержит полезную информацию, вторая же обусловлена ненулевыми начальными условиями и представляет собой медленно затухающую помеху, искажающую измерение. Описываемое устройство, обрабатывая выходной сигнал такой динамической системы, выделяет из него по желанию только вынужденную или только свободную составляющую, исключая необходимость ожидания завершения переходных процессов в наблюдаемой динамической системе.
При этом динамическая система, выходной сигнал которой наблюдается, по предположению представляет собой замкнутый контур, состоящий из линейного динамического объекта в прямой цепи и некоторого регулятора в обратной цепи.
Предметом изобретения является структура и параметрические настройки устройства динамической компенсации (посткомпенсации), позволяющие корректировать выходной сигнал динамической системы в соответствии с желаемым изменением динамических свойств обратной связи этой системы без изменения каких бы то ни было настроек в реальности.
Для достижения цели изобретения в устройство включены соответствующим образом соединенные математические или физические модели объекта в прямой цепи системы, а также математические или физические модели реального и виртуального (желаемого) регуляторов в обратной связи наблюдаемой динамической системы.
В соответствии с этим аспектом изобретения предполагается, что модели функционирования динамического объекта, охваченного в системе обратной связью, и динамических (или статических) регуляторов, реализующих, во-первых, реально существующие, а во-вторых, желаемые обратные связи, известны и доступны для воспроизведения на соответствующих вычислительных устройствах или физически подобных устройствах. Эти устройства входят в состав изобретенного устройства в качестве элементов.
Характерными примерами использования данного изобретения являются:
выделение вынужденной (обусловленной внешними воздействиями) составляющей выходного сигнала измерительной системы на фоне незатухшей или слишком медленно затухающей свободной (обусловленной ненулевыми начальными условиями) составляющей этого сигнала;
осуществляемая в методических или исследовательских интересах имитация на тренажерах или моделирующих стендах поведения динамических систем в условиях нештатного функционирования средств автоматики и/или ошибочных действий персонала на режимах с располагаемыми записями нормального (штатного) функционирования реальных систем.
Рассмотрим работу данного устройства реальную конструкцию.
Изобретение применено к гравиградиентометру Этвеша (измерителю гравитационных градиентов), предназначенного для измерения вторых (пространственных) производных - градиентов гравитационного потенциала Земли. Фиг.1 показывает упрощенную структуру 11 гравиградиентометра и структуру устройства 32 динамической компенсации сигналов подключенного к выходу гравиградиентометра.
Гравиградиентометр 11 состоит из чувствительно элемента (гантели) 16 и модели 35 физических факторов демпфирования колебаний этого чувствительного элемента 16, обусловленных принципом работы прибора и технологическими возможностями его производства и реализующих конструктивную обратную связь прибора. Конструктивные и параметрические решения такого прибора приходится выбирать таким образом, чтобы силы демпфирования на сумматоре 13 не подавляли измеряемый сигнал 12 заведомо весьма низкого уровня. Слабое демпфирование чувствительного элемента обуславливает наличие практически незатухающих его колебаний переменной амплитуды (сигнал 17), препятствующих производству измерений. Это препятствует достижению приемлемых метрологических свойств гравиградиентометра как измерительного прибора в составе технической системы, размещенной, например, на подвижном основании. Усиление же демпфирующих связей по цепи 36 приводит к диссипации энергии чувствительного элемента, препятствующей его реагированию на измеряемые сигналы 12 гравитационного поля Земли.
Основной частью устройства 32 динамической компенсации сигналов (посткомпенсатора) является модель 27 чувствительного элемента гравиградиентометра, охваченная моделью виртуальной обратной связи 28. В качестве виртуальной обратной связи выбираются такие параметры реально отсутствующих приспособлений демпфирования колебаний чувствительного элемента гравиградиентометра, которые желательны с точки зрения достаточно быстрого затухания свободных колебаний, но заведомо неприемлемы с точки зрения принципа функционирования прибора из-за высокого уровня диссипации (рассеивания) энергии.
Во время выполнения измерений градиентов гравитационного поля Земли чувствительный элемент 16 гравиградиентометра совершает колебательные движения под действием двух факторов: сигнала 12 измеряемого гравитационного поля Земли в плоскости 15 вращения зонда прибора и ненулевых начальных условий выставки этого чувствительного элемента 16 в момент включения прибора и/или в момент изменения условий измерения.
Выходной сигнал 17 гравиградиентометра подается на вход устройства 32 динамической компенсации, осуществляющего динамическое разделение свободной и вынужденной составляющих сигнала, где направляется по двум параллельным цепям. Цепь 18 передает этот сигнал непосредственно на выходной сумматор 24. Цепь 34 подвергает этот сигнал динамической обработке в два этапа, на первом этапе с помощью параллельно соединенных моделей виртуального 19 и реального 33 регуляторов. Виртуальный регулятор представляет собой модель нереализованной обратной связи системы, желательной для обеспечения нужной интенсивности затухания процессов. Реальный же регулятор - это модель 35 обратной связи, обеспечивающей в данном примере накопление энергии чувствительным элементом за счет ничтожного демпфирования его колебаний. В результате сумматором 30 вычисляется приращение сигнала обратной связи чувствительного элемента гравиградиентометра, обусловленное заменой реальных характеристик демпфирования чувствительного элемента их виртуальными значениями. На втором этапе полученный сигнал 21 подается на входной сумматор 22 модели 27 чувствительного элемента гравиградиентометра с виртуальной обратной связью 28. На выходе этой модели формируется оценка возможного приращения выходного сигнала гравиградиентометра, вызванного обеспечением желаемой интенсивности демпфирования свободной составляющей. Выходным сумматором 24 вычисляется корректированный сигнал 25 гравиградиентометра.
Устройство для динамической компенсации выходных сигналов (посткомпенсации) динамической системы работает следующим образом. Линейный динамический объект с передаточными матрицами  от входа 14 к выходу 17 и
от входа 14 к выходу 17 и  от начального условия к выходу 17 охвачен динамической обратной связью с передаточной матрицей Креал(p) от выхода 17 к обратному воздействию по цепи 36, как это показано на фиг.3а. Под действием неизмеримых и неконтролируемых начальных условий и/или входных воздействий в замкнутой системе «объект - регулятор» протекают процессы, наблюдаемые в выходных сигналах 17. Таким образом, передаточные матрицы гравиградиентометра принимают значения, выражаемые известными матричными формулами
от начального условия к выходу 17 охвачен динамической обратной связью с передаточной матрицей Креал(p) от выхода 17 к обратному воздействию по цепи 36, как это показано на фиг.3а. Под действием неизмеримых и неконтролируемых начальных условий и/или входных воздействий в замкнутой системе «объект - регулятор» протекают процессы, наблюдаемые в выходных сигналах 17. Таким образом, передаточные матрицы гравиградиентометра принимают значения, выражаемые известными матричными формулами


где использованы обозначения: ν - сигнал 1, u - сигнал 12, у - сигнал 17, 0 - начальное условие, р - комплексная переменная. Вместе с тем по содержанию решаемой технической задачи требуется воспроизвести процессы аналогичной системы, но с другой обратной связью, характеризуемой другой передаточной матрицей Квирт(р) от сигнала 17 на выходе к обратному воздействию по цепи 36, как это показано на фиг.3б. В этом случае передаточные матрицы гравиградиентометра выражались бы формулами


Очевидно, что преобразование передаточных матриц  и
и  в передаточные матрицы
в передаточные матрицы  и
и  связано с использованием динамического компенсатора с передаточной матрицей Н(р) от сигнала 17 на выходе реальной системы до сигнала 25. При этом для передаточной матрицы Н(р) должны выполняться тождества
связано с использованием динамического компенсатора с передаточной матрицей Н(р) от сигнала 17 на выходе реальной системы до сигнала 25. При этом для передаточной матрицы Н(р) должны выполняться тождества


В качестве такого компенсатора предлагается компенсатор с передаточной матрицей

структура которого и показана на фиг.2. Общее же доказательство этого ключевого тождества строится на оригинальных результатах авторов в теории линейных систем.
Результат функционирования устройства можно охарактеризовать сравнением выходного сигнала 17 гравиградиентометра и выходного сигнала 25 устройства 32. Сигнал 17 состоит из двух слагаемых: полезного (измеряемого) сигнала в виде вынужденной составляющей колебаний чувствительного элемента 16, возбужденных влиянием сигнала 12 гравитационного поля Земли, и слабо затухающей помехи в виде свободной составляющей колебаний этого же чувствительного элемента 16, возбужденных ненулевыми начальными условиями в начале каждого очередного временного интервала измерений. Сигнал 25 состоит тоже из двух слагаемых: практически неизмененного полезного (измеряемого) сигнала, пропорционального вынужденным колебаниям чувствительного элемента 16 и сильно задемпфированного (искусственно ослабленного, скомпенсированного) сигнала, пропорционального свободным колебаниям чувствительного элемента 16.
В качестве примера, подтверждающего работоспособность устройства, рассмотрим электростатический акселерометр типа «Super Cactus» (Франция), предназначенный для измерения малых линейных ускорений орбитальных объектов. Данный акселерометр может служить прототипом для построения орбитального гравиградиентометра и имеет линейную модель поступательных колебаний центра масс пробного тела относительно центра подвеса с параметрами: масса пробного тела m=0,01 кг; частота собственных поступательных колебаний в электростатическом подвесе Ω0=1 c-2; время релаксации (затухания) собственных колебаний Т0=100 с.
Переходный процесс при измерении электростатическим акселерометром ступенчато нарастающего ускорения представлен на фиг.4. Хорошо видны слабо затухающие колебания (время входа в 5%-ную трубку составляет около тысячи секунд).
Будем считать, что требуется обеспечить переходному процессу «задемпфированный» характер с относительным коэффициентом затухания 0,5(T0 Ω0)-1=0,707 без изменения частоты собственных колебаний. Это означает, что у виртуального акселерометра частота собственных колебаний должна сохраниться такой же, как и у реального акселерометра, т.е. Ωвирт= Ω0=1 с-2, а время релаксации собственных колебаний должно составлять величину Твирт=1,414 с, т.е. практически на два порядка меньшую, чем у реального акселерометра. В этом случае при следующей модели акселерометра

где уi(р) - выходные сигналы акселерометра, пропорциональные перемещению и скорости перемещения пробного тела; уi0 - соответствующие начальные условия; α(р) - измеряемое ускорение; передаточная матрица посткомпенсатора имеет вид
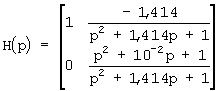
Такому посткомпенсатору соответствуют указанные на фиг.3 элементы
Креал=0, Квирт=[0 1,414], 
На фиг.5 изображен переходный процесс выходного сигнала посткомпенсатора при обработке указанных на фиг.4 вынужденных сигналов реального электростатического акселерометра. Выходная реакция посткомпенсатора на ненулевые начальные условия электростатического акселерометра приведена на фиг.6.
Использование данного изобретения позволяет наблюдать выходные сигналы физической динамической системы, не изменяющейся при изменении свойств динамических обратных связей внутри данной физической динамической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2002 |
|
RU2231819C2 |
| СПОСОБ КОРРЕКЦИИ СЛОЖНЫХ СИСТЕМ И КОМПЕНСАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2451968C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГРУППЫ НЕРЕГУЛИРУЕМЫХ ТУРБИН | 2015 |
|
RU2598335C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2153188C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2004 |
|
RU2259597C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Способ динамических испытаний конструкций и систем на механические и электронные воздействия | 2019 |
|
RU2702930C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
Изобретение относится к устройствам для моделирования различных физических динамических систем, которые характеризуются протекающими в них сложными процессами и явлениями. Техническим результатом заявленного изобретения является обеспечение наблюдения выходных сигналов физической динамической системы, не изменяющихся при изменении свойств динамических обратных связей внутри данной физической динамической системы. Для этого заявленное устройство содержит блоки моделирования виртуального регулятора обратной связи с изменяемыми характеристиками физической динамической системы, блоки моделирования реального регулятора обратной связи физической динамической системы, блок суммирования сигналов, входной и выходной сумматоры, блок математического моделирования физической динамической системы и блоки моделирования виртуальной обратной связи с изменяемыми характеристиками, используемой в физической динамической системе. 6 ил.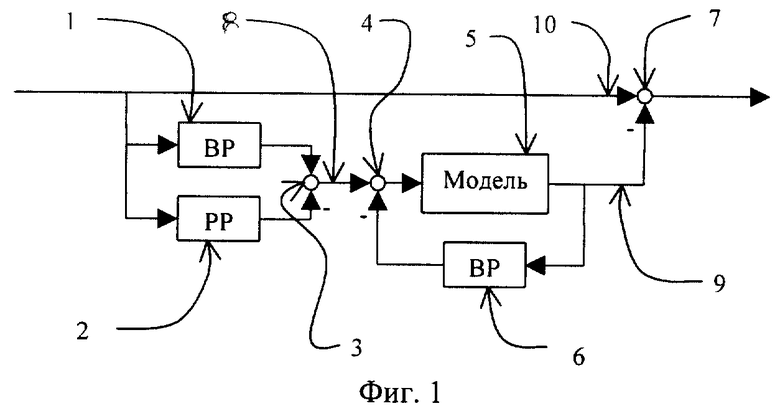
Устройство динамической компенсации влияния обратной связи физической динамической системы на ее выходные сигналы, содержащее, по меньшей мере, один блок моделирования виртуального регулятора обратной связи с изменяемыми характеристиками физической динамической системы, по меньшей мере, один блок моделирования реального регулятора обратной связи физической динамической системы и блок суммирования сигналов, входной и выходной сумматоры, блок математического моделирования физической динамической системы и, по меньшей мере, один блок моделирования виртуальной обратной связи с изменяемыми характеристиками, используемой в физической динамической системе, вход, по меньшей мере, одного блока моделирования виртуального регулятора обратной связи с изменяемыми характеристиками физической динамической системы и вход, по меньшей мере, одного блока моделирования реального регулятора обратной связи физической динамической системы связаны с первым входом выходного сумматора, при этом выходы, по меньшей мере, одного блока моделирования виртуального регулятора обратной связи с изменяемыми характеристиками физической динамической системы и, по меньшей мере, одного блока моделирования реального регулятора обратной связи физической динамической системы соединены с соответствующими входами блока суммирования сигналов, соединенного выходом с первым входом входного сумматора, второй вход которого подключен к выходу блока моделирования виртуальной обратной связи с изменяемыми характеристиками, используемой в физической динамической системе, выход входного сумматора через блок математического моделирования физической динамической системы связан со входом блока моделирования виртуальной обратной связи с изменяемыми характеристиками, используемой в физической динамической системе, и вторым входом выходного сумматора.
| US 4151587 A, 24.04.1979.RU 2155983 C1, 10.09.2000.RU 94020098 A, 10.11.1997.US 5352961 A, 04.10.1994.US 5798919 A, 25.08.1998.US 4195337 A, 25.03.1980. |

