Изобретение относится к области автоматического управления динамическими объектами, обеспечивающего их точное движение по заданной траектории, в частности летательными аппаратами и/или подводными аппаратами.
Известен способ управления динамическими объектами [Ройтенберг Я.Н. Автоматическое управление. - М.: Наука, 1978, с.225-226], заключающийся в том, что по известным координатам состояния объекта определяют величину ошибки, равную разности между заданными входными координатами и соответствующими текущими координатами объекта. Команды управления объектом формируются в соответствии с величинами ошибки и коэффициентов пропорциональности, которые вычисляются на основе решения уравнения Риккати.
Недостатком указанного способа управления является невозможность обеспечить высокую точность управления (особенно нелинейными нестационарными объектами) в условиях неконтролируемых возмущений.
Известен также способ управления движением динамического объекта, включающий подачу на вход его системы управления сигнала программного воздействия, определяющего требуемое местоположение объекта в произвольный момент времени, оценку текущего отклонения местоположения этого объекта от желаемого местоположения, задаваемого сигналом программного воздействия, использование текущего отклонения для получения корректирующего сигнала управления, уменьшающего величину текущего отклонения местоположения этого объекта от заданного сигналом программного воздействия местоположения, причем сигнал программного воздействия учитывают и используют при формировании дополнительного корректирующего сигнала управления для дополнительного уменьшения текущего отклонения местоположения этого объекта от заданного сигналом программного воздействия местоположения [Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М.: Наука, 1978, с.144-145].
Этот способ управления является наиболее близким к предлагаемому новому способу. Недостатком этого способа является невысокая точность при управлении объектом по программным траекториям, если параметры этого объекта за счет взаимодействия с окружающей средой и эффектов взаимовлияния между всеми его степенями подвижности непредсказуемо изменяются.
Задачей изобретения является устранение указанного выше недостатка и, в частности, обеспечение требуемой высокой точности движения объекта по задаваемой произвольной пространственной траектории с учетом его текущих динамических свойств и переменных параметров независимо от типа используемых корректирующих устройств системы управления движением.
Технический результат изобретения заключается в обеспечении возможности перемещения объекта по произвольно заданным непрерывным пространственным траекториям с заданной динамической точностью при использовании традиционных систем управления без идентификации его текущих динамических свойств и параметров, а также параметров действующих на него внешних воздействий. Это достигается за счет формирования таких новых программных сигналов, не совпадающих с программной траекторией его движения, которые, учитывая наличие реально существующей (возможно большой) динамической ошибки работы используемой типовой системы управления (большого отклонения текущего положения объекта от задаваемого программного сигнала), обеспечивают точное прохождение этого объекта по заданной траектории.
Способ управления движением динамического объекта по заданной пространственной траектории, включающий подачу на входы систем каждого канала управления программных воздействий, определяющих желаемое местоположение объекта на этой траектории в произвольный момент времени, оценку в каждом канале управления текущего отклонения объекта от программного значения, задаваемого сигналами программных воздействий каждого канала, использование в каждом канале соответствующего текущего отклонения для получения сигналов управления объектом в следящем режиме, причем сигналы всех программных воздействий учитывают и используют при формировании в каждом канале управления дополнительных корректирующих сигналов управления для дополнительного уменьшения текущих отклонений от сигналов программных воздействий, к программным воздействиям добавляют дополнительные программные воздействия, приводящие к смещению требуемого текущего местоположения объекта с заданной траектории и к выработке корректирующими устройствами дополнительных сигналов управления, компенсирующих отклонения объекта от заданной траектории так, чтобы значения этих текущих отклонений ограничивались величиной, не превышающей заранее заданного для данного динамического объекта допустимого значения.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналога свидетельствует о соответствии заявленного решения критерию "новизна".
Признаки отличительной части формулы изобретения обеспечивают решение следующих функциональных задач.
Признак «к программным воздействиям добавляют дополнительные программные воздействия» обеспечивает выработку таких суммарных программных воздействий в каждом канале управления, которые учитывают ошибки в работе используемых корректирующих устройств, вызванные неизвестными внешними воздействиями, переменностью параметров объекта и среды, а также неточности в описании динамики объекта управления и др., приводящие к существенному отклонению объекта от заданной пространственной траектории. При этом введение дополнительных программных воздействий позволяет значительно повысить точность работы всей системы управления в целом (предельно минимизировать отклонение объекта от заданной траектории).
Признак «значения этих текущих отклонений ограничивались величиной, не превышающей заранее заданного для данного динамического объекта допустимого значения» позволяет объекту точно двигаться вдоль заданной траектории с отклонением, не превышающим допустимой величины.
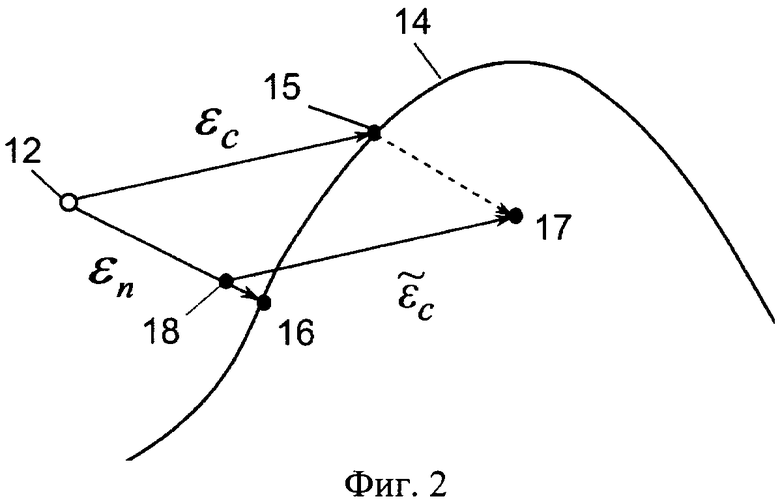
Заявленное изобретение иллюстрируется чертежами, где на фиг.1 показана схема одного канала системы управления движением динамического объекта, реализующая заявленный способ; на фиг.2 схематически показано движение этого объекта вдоль траектории.
На чертежах показаны: устройство 1 программного управления; первое 2 и второе 3 корректирующие устройства; усилитель 4; исполнительный элемент 5; первый 6, второй 7 и третий 8 сумматоры; линия 9 отрицательной обратной связи; система 10 управления i-го канала; блок 11 формирования дополнительных программных сигналов xiд ( ); 12 - положение объекта 13 управления относительно программной траектории 14 при использовании традиционного способа управления; 15 - желаемое местоположение объекта 13 на программной траектории 14 при использовании традиционного способа управления; 16 - точка на программной траектории 14, ближайшая к текущему местоположению объекта 13 управления при использовании традиционного способа управления; 17 - точка, положение которой определяет текущее желаемое положение объекта 13 управления после соответствующей коррекции программных воздействий в каждом канале управления при использовании предлагаемого нового способа управления; 18 - реальное положение объекта 13 управления относительно программной траектории 14 при использовании предлагаемого способа управления с учетом формирования дополнительных программных воздействии xiд (
); 12 - положение объекта 13 управления относительно программной траектории 14 при использовании традиционного способа управления; 15 - желаемое местоположение объекта 13 на программной траектории 14 при использовании традиционного способа управления; 16 - точка на программной траектории 14, ближайшая к текущему местоположению объекта 13 управления при использовании традиционного способа управления; 17 - точка, положение которой определяет текущее желаемое положение объекта 13 управления после соответствующей коррекции программных воздействий в каждом канале управления при использовании предлагаемого нового способа управления; 18 - реальное положение объекта 13 управления относительно программной траектории 14 при использовании предлагаемого способа управления с учетом формирования дополнительных программных воздействии xiд ( ); xпрi - сигнал программного управления рассматриваемого i-го канала, соответствующий желаемому местоположению 15 объекта 13 на траектории 14; хпрj - сигналы программного управления, подаваемые на другие j-е каналы (i≠j,
); xпрi - сигнал программного управления рассматриваемого i-го канала, соответствующий желаемому местоположению 15 объекта 13 на траектории 14; хпрj - сигналы программного управления, подаваемые на другие j-е каналы (i≠j,  ), соответствующие желаемому местоположению 15 объекта 13 на траектории 14;
), соответствующие желаемому местоположению 15 объекта 13 на траектории 14;  - скорректированный сигнал программного управления рассматриваемого i-го канала, соответствующий желаемому местоположению 17 объекта 13;
- скорректированный сигнал программного управления рассматриваемого i-го канала, соответствующий желаемому местоположению 17 объекта 13;  - скорректированные сигналы программного управления, подаваемые на j-e каналы (i≠j,
- скорректированные сигналы программного управления, подаваемые на j-e каналы (i≠j,  ), соответствующие желаемому местоположению 17 объекта 13; εn - текущее отклонение текущего местоположения 12 объекта 13 управления от заданной программной траектории 14; εc - текущее отклонение местоположения 12 объекта 13 управления от заданного программными сигналами хпрi (
), соответствующие желаемому местоположению 17 объекта 13; εn - текущее отклонение текущего местоположения 12 объекта 13 управления от заданной программной траектории 14; εc - текущее отклонение местоположения 12 объекта 13 управления от заданного программными сигналами хпрi ( ) его желаемого местоположения 15 на траектории 14;
) его желаемого местоположения 15 на траектории 14;  - текущее отклонение реального положения 18 объекта 13 управления от его желаемого местоположения 17; хi - текущее значение выходной координаты i-го канала управления объектом 13; xj - текущие значения выходных координат j-х каналов управления объектом 13 (i≠j,
- текущее отклонение реального положения 18 объекта 13 управления от его желаемого местоположения 17; хi - текущее значение выходной координаты i-го канала управления объектом 13; xj - текущие значения выходных координат j-х каналов управления объектом 13 (i≠j,  ), εi - текущая ошибка слежения i-го канала управления.
), εi - текущая ошибка слежения i-го канала управления.
В качестве устройства 1 программного управления, первого 2 и второго 3 корректирующих устройств, усилителя 4, исполнительного элемента 5, первого 6, второго 7 и третьего 8 сумматоров, а также блока 11 формирования вектора εn использованы известные устройства, чьи технические и эксплуатационные характеристики соответствуют режимным параметрам работы объекта 13.
Объектами 13 управления могут являться автономные подводные или летательные аппараты известной конструкции, снабженные автоматической системой управления, включающей навигационную систему, обеспечивающую оценку текущего отклонения εn местоположения 12 объекта 13 от траектории 14 его движения. Исполнительным элементом может быть движитель или привод рулевых устройств подводного или летательного аппарата (в зависимости от принятой системы пространственного позиционирования и реализованной в конструкции указанных объектов управления).
При движении объекта 13 по задаваемой криволинейной пространственной траектории 14 под управлением корректирующих устройств 2 и 3 неизменно возникает динамическая ошибка εс, величина которой зависит от типа этих корректирующих устройств, изменений параметров объекта 13 и окружающей среды, а также внешних воздействий на объект. Одновременно с этой динамической ошибкой εс при движении объекта 13 по криволинейной программной траектории 14, которая задается с помощью программных сигналов хпрi (), возникает отклонение εn этого объекта 13 от программной траектории 14. В конечном итоге отклонение εn, определяющее динамическую точность прохождения объекта 13 по траектории 14 с некоторым запаздыванием относительно программной точки 15, является определяющим (главным). Отклонение εn можно уменьшить, если использовать очень сложные корректирующие устройства, оснащенные сложными измерительными и чувствительными элементами, позволяющими учесть негативные факторы, действующие на объект 13, и все изменения его параметров во время движения. Однако, помимо резкого повышения стоимости всей системы в целом использование таких, устройств в объектах 13, движущихся в пространстве, или затруднено, или вообще невозможно. В том числе и ввиду ограниченной вычислительной мощности бортовых компьютеров. Поэтому для обеспечения высокой точности отслеживания объектом 13, содержащим только простейшие корректирующие устройства 2 и 3, заданной траектории 14, следует так изменять желаемые положения 15 объекта 13, задаваемые непрерывно изменяющимися программными сигналами хпрi (), чтобы эти новые желаемые положения 17, определяемые вновь сформированными программными сигналами (), обеспечивали высокоточное прохождение объекта 13 по траектории 14 даже в том случае, когда реальная динамическая ошибка системы  (расстояние между точками 18 и 17) остается весьма большой.
(расстояние между точками 18 и 17) остается весьма большой.
В традиционных следящих системах, построенных по принципу введения отрицательных обратных связей, в каждом канале управления формируется динамическая ошибка слежения (величина отклонения от заданного программного воздействия εi), которая подается на вход заранее рассчитанного первого корректирующего устройства 2 и позволяет сформировать сигналы управления исполнительными элементами объекта, уменьшающие величину этой динамической ошибки. Для еще большего уменьшения этой динамической ошибки вводят дополнительные корректирующие сигналы управления исполнительными элементами (второе корректирующее устройство 3). В результате строится так называемое «комбинированное управление», обеспечивающее каждому каналу управления малую чувствительность его динамической точности к входным воздействиям (инвариантность качества управления к переменному закону изменения указанных сигналов программных воздействий). Однако, как известно из теории автоматического управления, сформировать дополнительный корректирующий сигнал управления исполнительными элементами в силу инерционности реальных элементов в комбинированной системе удается лишь приближенно. В результате точной инвариантности (особенно для объектов, параметры которых непрерывно изменяются в широких пределах и часто неизвестны) достичь никогда не удается.
В отличие от традиционных способов управления предлагаемый новый способ, в котором обеспечивается управление не только самими динамическими объектами, а еще и программными сигналами, подаваемыми на входы соответствующих систем управления, позволяет гарантированно достичь предельно высокой динамической точности перемещения указанных сложных динамических объектов с неизвестными и непрерывно изменяющимися параметрами по произвольным пространственным траекториям 14. Причем реализация предлагаемого нового способа управления, как показали результаты экспериментов, не только не вызывает затруднений, но и является предельно простой.
Заявленный способ управления реализуется следующим образом.
При движении динамического объекта 13 по задаваемой криволинейной пространственной траектории 14 величина динамической ошибки 8 с этого движения увеличивается при увеличении скорости перемещения объекта 13 и кривизны соответствующего участка траектории, поскольку в этом случае возникают большие взаимовлияния между всеми каналами управления, которые приводят к сильным изменениям параметров всех его исполнительных элементов 5. В результате происходит не только запаздывание движения объекта 13 по траектории 14 (это не приводит к существенному ухудшению работоспособности объекта), но, самое главное, одновременно наблюдается сильное отклонение этого объекта от указанной траектории на величину εn (на участках траектории с большой кривизной). А это уже может привести к возникновению аварийных ситуаций. В результате для обеспечения высокой точности перемещения объекта 13 именно вблизи траектории 14 предлагаемый способ позволяет осуществлять управление не только объектом 13, но и самими программными сигналами хпрi () во всех каналах управления его пространственным движением таким образом, чтобы точка 17, положение которой определяет текущее желаемое положение объекта 13 управления смещалась с траектории 14, а объект 13 в процессе его движения всегда находился вблизи задаваемой криволинейной траектории 14 с отклонением от нее, не превышающим допустимую величину. То есть в данном способе предлагается осуществлять еще и непрерывное управление желаемым местоположением 17 объекта 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДИНАМИЧЕСКОГО ОБЪЕКТА ПО ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2010 |
|
RU2445670C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДИНАМИЧЕСКОГО ОБЪЕКТА ПО ТРАЕКТОРИИ | 2009 |
|
RU2406103C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДИНАМИЧЕСКОГО ОБЪЕКТА ПО ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2012 |
|
RU2480805C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МНОГОСТЕПЕННОГО МАНИПУЛЯТОРА | 2021 |
|
RU2771456C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ МАНИПУЛЯТОРОМ В РЕЖИМЕ ЗАВИСАНИЯ ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2475799C2 |
| Способ управления движением динамического объекта по пространственной траектории | 2023 |
|
RU2822720C1 |
| Пространственная имитационная модель системы управления автоматическим маневренным летательным аппаратом | 2019 |
|
RU2735418C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| СПОСОБ ДИАГНОСТИКИ ФОРМООБРАЗОВАНИЯ ПРИ СВАРКЕ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2127177C1 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ МАНИПУЛЯТОРА | 2011 |
|
RU2462745C1 |
Изобретение относится к области автоматического управления динамическими объектами и может быть использовано для создания высокоточных систем автоматического управления движением этих объектов по заданным пространственным траекториям. Технический результат изобретения заключается в обеспечении возможности перемещения объекта по произвольно заданным непрерывным пространственным траекториям с заданной динамической точностью при использовании традиционных систем управления без идентификации его текущих динамических свойств и параметров, а также параметров действующих на него внешних воздействий. В способе дополнительно использованы блок формирования дополнительных программных сигналов и третий сумматор. Введение новых элементов позволяет сформировать такие новые программные сигналы, не совпадающие с программной траекторией движения объекта управления, которые, учитывая наличие реально существующей (возможно большой) динамической ошибки работы используемой типовой системы управления (большого отклонения текущего положения объекта от задаваемого программного сигнала), обеспечивают точное прохождение этого объекта по заданной траектории. 2 ил.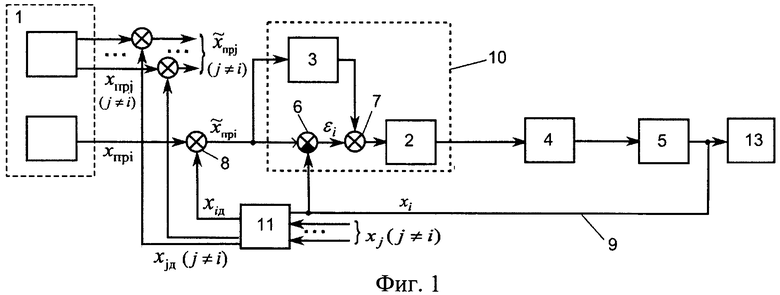
Способ управления движением динамического объекта по заданной пространственной траектории, включающий подачу на входы систем каждого канала управления программных воздействий, определяющих желаемое местоположение объекта на этой траектории в произвольный момент времени, оценку в каждом канале управления текущего отклонения объекта от программного значения, задаваемого сигналами программных воздействий каждого канала, использование в каждом канале соответствующего текущего отклонения для получения сигналов управления объектом в следящем режиме, причем сигналы всех программных воздействий учитывают и используют при формировании в каждом канале управления дополнительных корректирующих сигналов управления для дополнительного уменьшения текущих отклонений от сигналов программных воздействий, отличающийся тем, что к программным воздействиям добавляют дополнительные программные воздействия, приводящие к смещению требуемого текущего местоположения объекта с заданной траектории и к выработке корректирующими устройствами дополнительных сигналов управления, компенсирующих отклонения объекта от заданной траектории так, чтобы значения этих текущих отклонений ограничивались величиной, не превышающей заранее заданного для данного динамического объекта допустимого значения.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДИНАМИЧЕСКОГО ОБЪЕКТА ПО ТРАЕКТОРИИ | 2009 |
|
RU2406103C1 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
| Способ обработки отходов, преимущественно буровых растворов | 1979 |
|
SU743584A3 |
| Способ получения (S)-альфа-этил-2-оксо-1-пирролидинацетамида | 1986 |
|
SU1428195A3 |
| Устройство для очистки движущейся металлической полосы | 1982 |
|
SU1087210A1 |

