Изобретение относится к области вооружения, а именно к ракетной технике и может быть использовано при разработке комплексов и систем малой дальности с теленаведением летательного аппарата на цель. Теленаведение - способ наведения, основанный на выработке команд управления на наземном пункте и передаче их на борт летательного аппарата (ЛА) в виде непрерывных команд управления рулями (в вертикальной и боковой плоскостях) и разовых команд различного назначения [1]. Работа имитационных моделей (ИМ) систем теленаведения ЛА обеспечивается наличием информации об угловых координатах цели, ЛА и главной обратной связи для замыкания контура управления. В известной патентной и научной литературе, соответствующей современному уровню развития техники представлены описания имитационных моделей систем управления автоматическим маневренным летательным аппаратом [2, 3], основанные на использовании одной угловой координаты цели и ЛА (как правило угол места) при выработке команд управления ЛА. Недостатком данных моделей является отсутствие в их структуре канала управления в боковой плоскости, что не позволяет им отразить траекторию наведения ЛА в трехмерном пространстве, имеющую важную роль при анализе наведения ЛА на цели, совершающие пространственные маневры типа «раскручивающаяся спираль», «неправильная бочка» и другие. Кроме этого в известных ИМ цель представляется точечным источником отраженных электромагнитных волн в радиодиапазоне, в то время как реальная цель представляет собой протяженный объект конечных размеров. При этом интенсивность создаваемого целью углового шума определяется ее размерами при пеленгации в радиодиапазоне системой сопровождения. Наиболее близкой к предлагаемой ИМ является цифровая имитационная модель системы управления ЛА малой дальности [4], структура которой представлена на фиг. 2. Имитационная модель содержит: программу движения цели относительно точки пуска ЛА в плоскости угла места и азимута, алгоритм программного вывода, алгоритм работы компенсатора динамической ошибки наведения.
Алгоритм программного вывода представляет собой программу обхода дыма, обеспечивающую быстрый захват ЛА на сопровождение оптико-электронной системой в зависимости от направления вектора скорости ветра. Запуск алгоритма компенсации динамической ошибки наведения производится сразу после захвата ЛА на сопровождение по угловым координатам.
Вычисление команд управления ЛА производится как на начальном участке, так и на участке наведения.
В формировании суммарных команд управления ЛА на участке наведения участвуют сигналы с выходов корректирующих фильтров, сигналы компенсации динамической ошибки, команды вывода ЛА на кинематическую траекторию. Выработанные таким образом команды управления передаются на борт ЛА, где исполняются путем изменения положения органов управления в соответствующих плоскостях. Команды управления при этом преобразуются из измерительной в исполнительную систему координат, с учетом угла скручивания.
Недостатком данной ИМ является отсутствие в ее структуре блока, имитирующего угловой шум цели и как следствие невозможность проведения моделирования и анализа теленаведения на групповые сосредоточенные цели, либо на цели, применяющие радиолокационные ловушки различных типов. Такие тактические ситуации часто создаются современными авиационными средствами для противодействия системам наведения ЛА.
Задачей изобретения является проведение анализа особенностей наведения ЛА на различные типы протяженных по дальности и угловым координатам целей, в том числе интенсивно-маневрирующих, с возможностью коррекции параметров элементов системы управления ЛА для определения технических возможностей повышения точности наведения в конкретных тактических ситуациях без проведения натурных экспериментов.
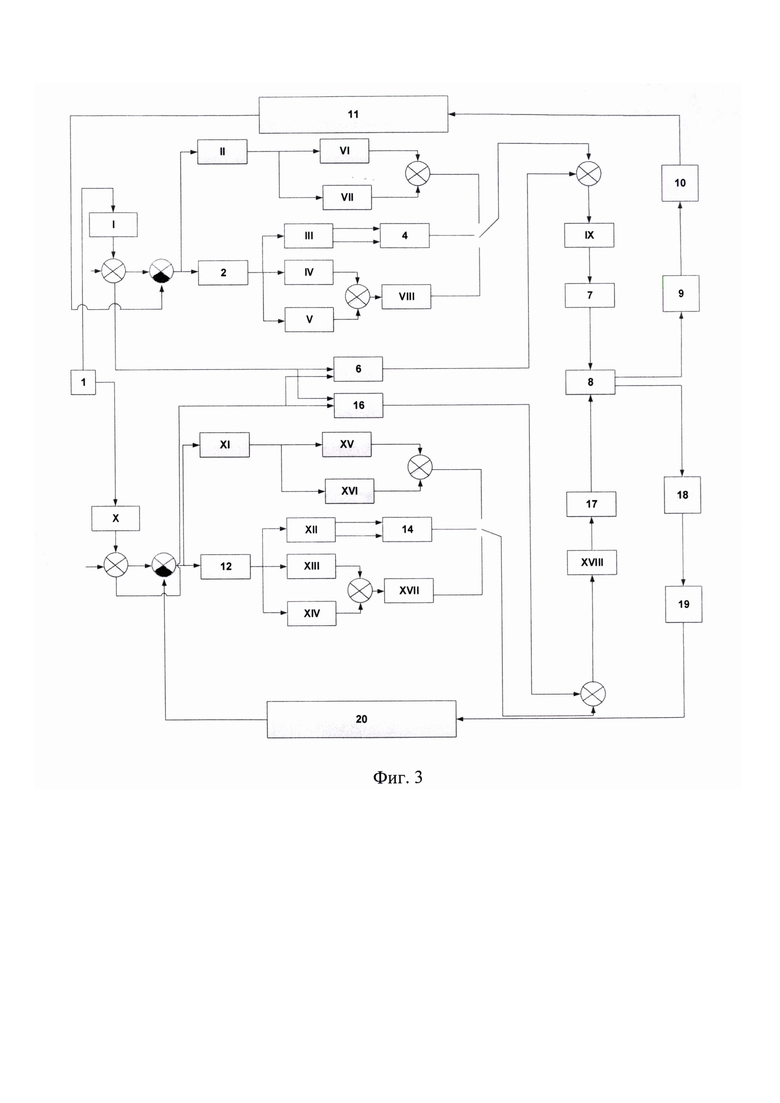
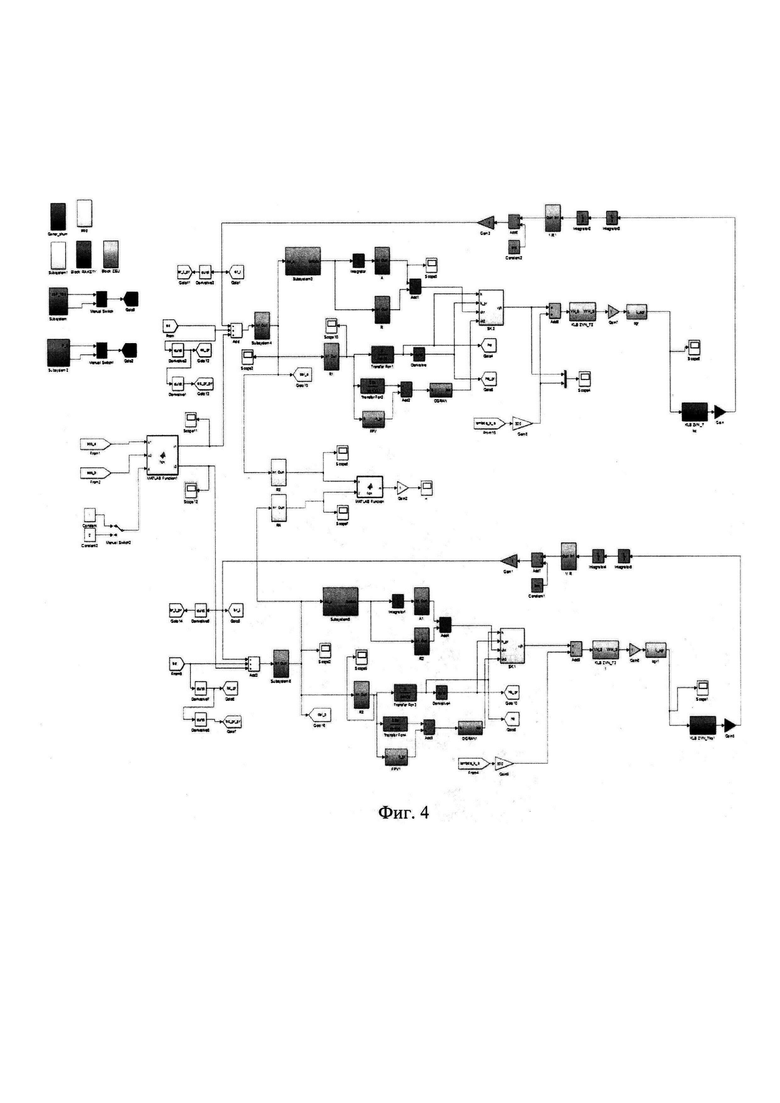
Для решения задачи изобретения предлагается структура системы управления ЛА, изображенная на фиг. 3, где 1 - блок формирования углового шума цели, 2 - нелинейный цифровой фильтр по углу места, 3 - корректирующий фильтр наведения по углу места, 4 - устройство умножения на программную функцию дальности до ЛА в плоскости угла места, 5 - кинематическое звено в плоскости угла места, 6 - программное устройство стабилизации по углу места, 7 - блок умножения на дальность до ЛА, 8 - дифференцирующее сглаживающее устройство по углу места, 9 - дифференцирующий фильтр по углу места, 10 - функциональный преобразователь вывода по углу места, 11 - схема переключения режимов «вывод - наведение» в плоскости угла места, 12 - релейный элемент в плоскости угла места, 13 - устройство ограничения максимальных команд управления по углу места, 14 - устройство ограничения максимальных команд управления в плоскости угла места, 15 - устройство расчета команды компенсации динамической ошибки наведения по углу места, 16 - преобразователь исполнительной системы координат, 17 - блок автопилот - ЛА в плоскости угла места, 18 - устройство ограничения максимальных команд управления по углу места после пересчета координат, 19 - нелинейный цифровой фильтр по азимуту, 20 - корректирующий фильтр наведения по азимуту, 21 - устройство умножения на программную функцию дальности до ЛА в плоскости азимута, 22 - устройство расчета команды компенсации динамической ошибки наведения в плоскости азимута, 23 - программное устройство стабилизации по азимуту, 24 - блок умножения на дальность до ЛА, 25 - дифференцирующее сглаживающее устройство по азимуту, 26 - дифференцирующий фильтр по азимуту, 27 - функциональный преобразователь вывода по азимуту, 28 - схема переключения режимов «вывод - наведение» в плоскости азимута, 29 - релейный элемент в азимутальной плоскости, 30 - устройство ограничения максимальных команд управления в плоскости азимута, 31 - устройство ограничения максимальных команд управления по азимуту, 32 - устройство ограничения максимальных команд управления по азимуту после пересчета координат, 33 - блок автопилот - ЛА в плоскости азимута, 34 - кинематическое звено в плоскости азимута. Предлагаемая структурная схема отличается от исходной, реализующей способ-прототип, наличием дополнительных элементов 1, 16, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, наличием связей между сумматором и компенсатором динамической ошибки по азимуту, между 1 и 2, 1 и 19, 15 и 22, 14 и 16, 16 и 30. Формула изобретения представлена на фиг. 1, где 35 - блок системы вывода ЛА на кинематическую траекторию в плоскости угла места, 36 - блок системы наведения ЛА в плоскости угла места, 37 - блок системы вывода ЛА на кинематическую траекторию в плоскости азимута, 38 - блок системы наведения ЛА в плоскости азимута. Компьютерная имитационная модель контура наведения автоматического маневренного летательного аппарата представлена на фиг. 4.
Сущность изобретения заключается в том, что в отличие от известной модели, для выполнения задачи изобретения координата угла места цели, проходя через сумматор преобразуется в угловое отклонение траектории полета ЛА от кинематической траектории, преобразуемое путем умножения на программную функцию дальности до ЛА в линейное отклонение ЛА, поступает на вход устройств, предназначенных для вывода ЛА на кинематическую траекторию, откуда после срабатывания схемы переключения режимов «вывод - наведение» на вход устройств режима «наведения» и далее после сложения с командой компенсации динамической ошибки наведения через устройство ограничения максимальных команд управления на вход системы «автопилот - ЛА» и через кинематическое звено на сумматор, замыкая обратную связь; при этом выработка команд управления ЛА происходит также и в горизонтальной плоскости наведения, а на вход каналов управления поступает аддитивная смесь текущих угловых координат цели и углового шума, вырабатываемого моделью углового шума цели раздельно для плоскостей наведения, команды компенсации динамических ошибок наведения вырабатываются в двух каналах управления, а совместный пересчет команд управления с учетом скручивания производится в преобразователе исполнительной системы координат после чего команды управления через устройство ограничения максимальных команд управления поступают на вход системы «автопилот - ЛА» для соответствующей плоскости наведения и через кинематическое звено на сумматор, замыкая обратную связь.
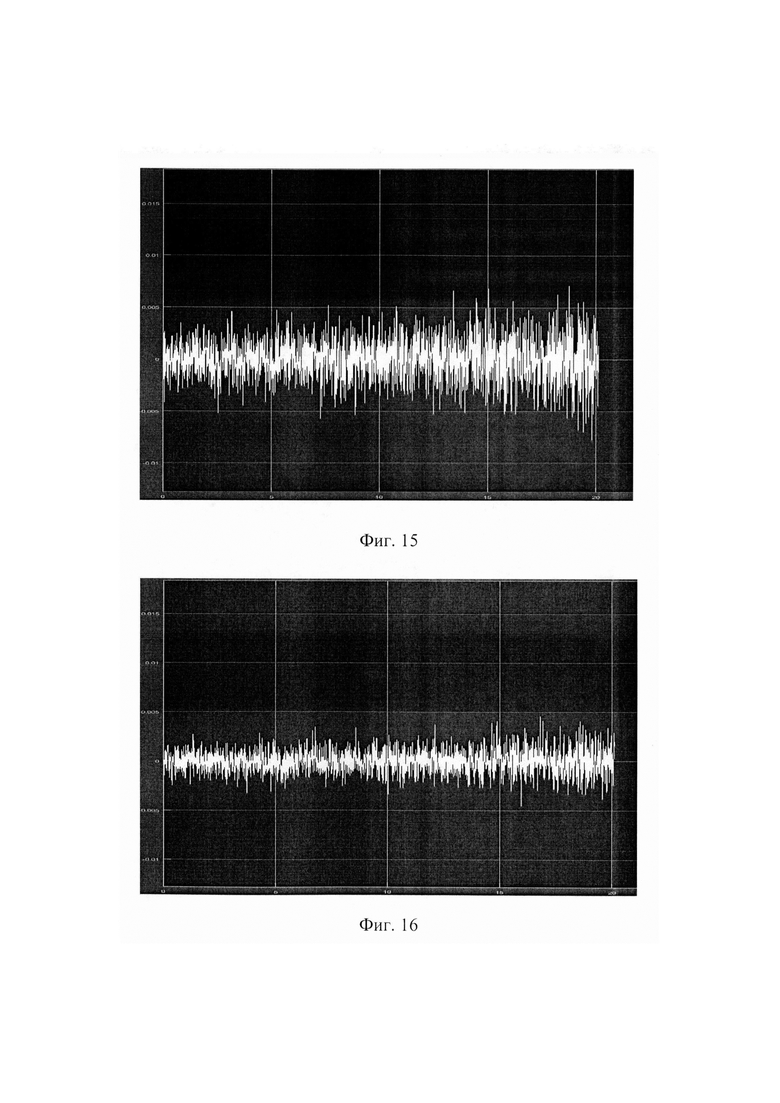
Для формирования углового шума протяженной цели в соответствии с законами распределения, исследованными в работах [5, 6] применены предусмотренные системой имитационного моделирования «Matlab» генераторы шума, распределенного по нормальному закону, с математическим ожиданием равным нулю и среднем квадратическим отклонением
где Тц - постоянная времени шума, изменяющаяся в соответствии с законом
b - коэффициент, учитывающий вид радиолокации, для активной радиолокации он равен 1
U1, U2 - коэффициенты, зависящие от дальности до цели, скорости ее изменения и от протяженности цели по плоскостям пеленгации
Kц - эмпирический коэффициент типа цели, подбираемый в соответствии с законами распределения углового шума, исследованными в [5, 6]
Lцε, Lцβ - линейные размеры цели по плоскостям. Угловой шум типовой цели, с размерами Lцε=25 м., Lцβ=15 м., полученный при использовании описанной методики моделирования представлен на фиг. 15, 16.
В преобразователе исполнительной системы координат производится вычисление команд K1, K2 в системе координат связанной с корпусом ЛА. Расчет команд производится через промежуточные переменные, характеризующие углы тангажа, рысканья, и крена ЛА.
Результирующие команды управления ограничиваются по уровню, и передаются на борт ЛА.
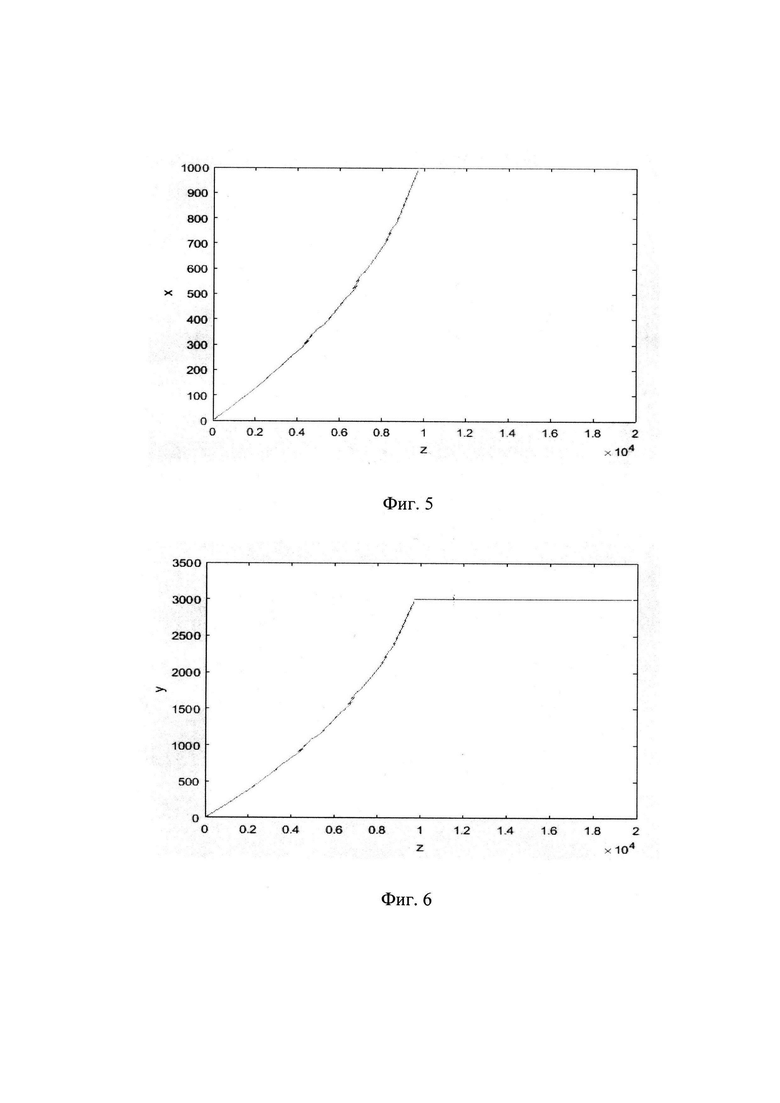
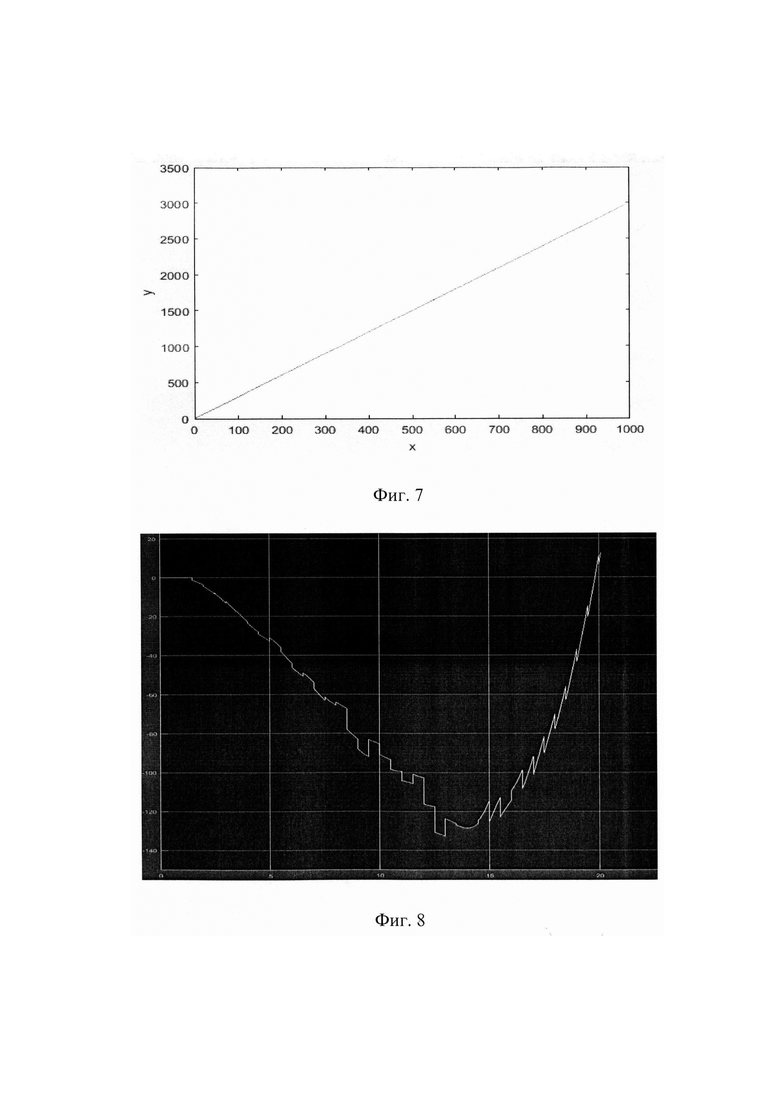
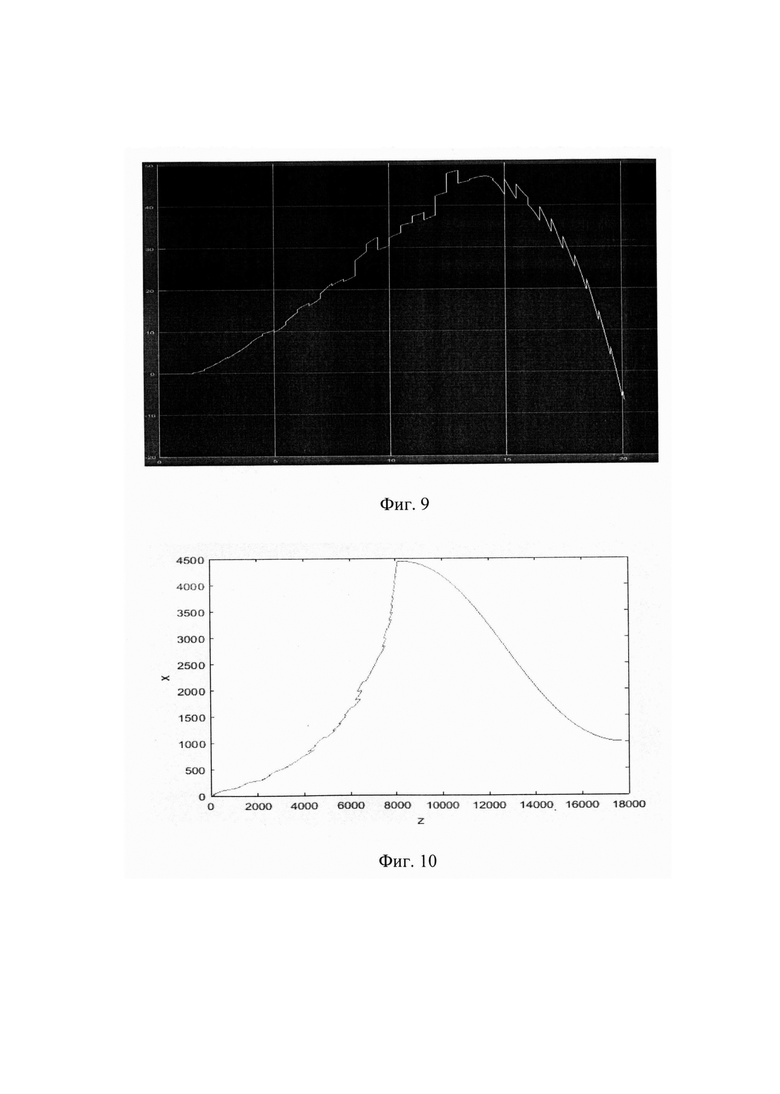
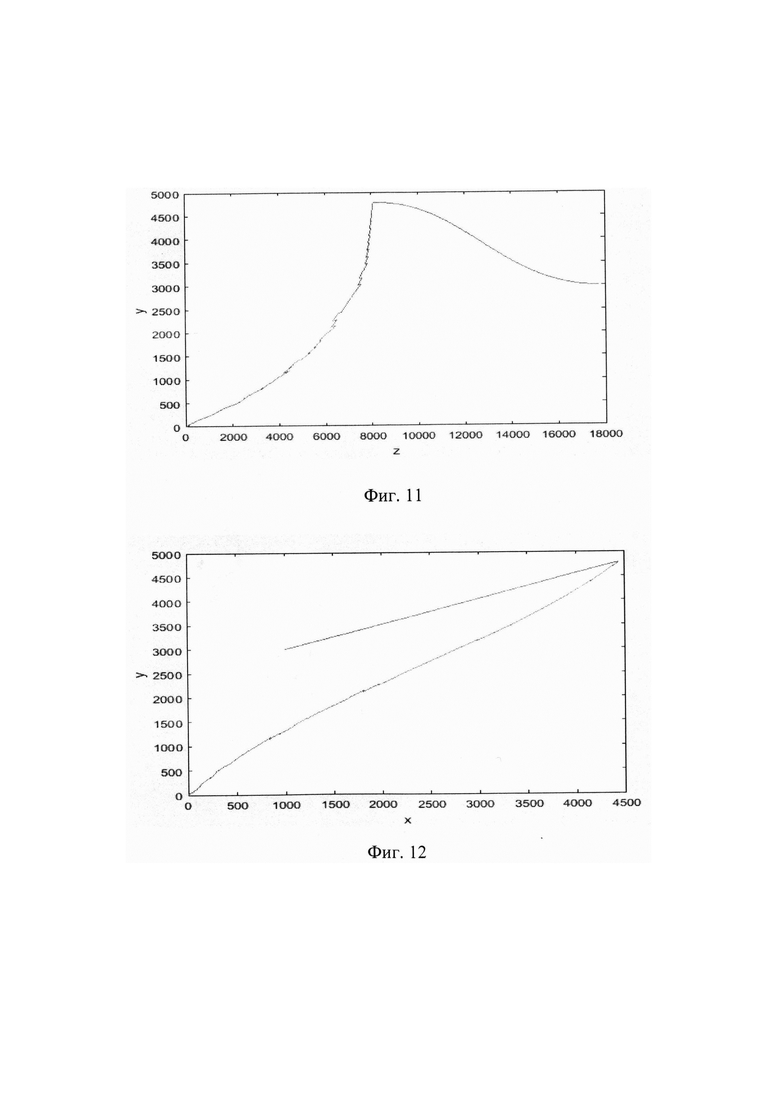
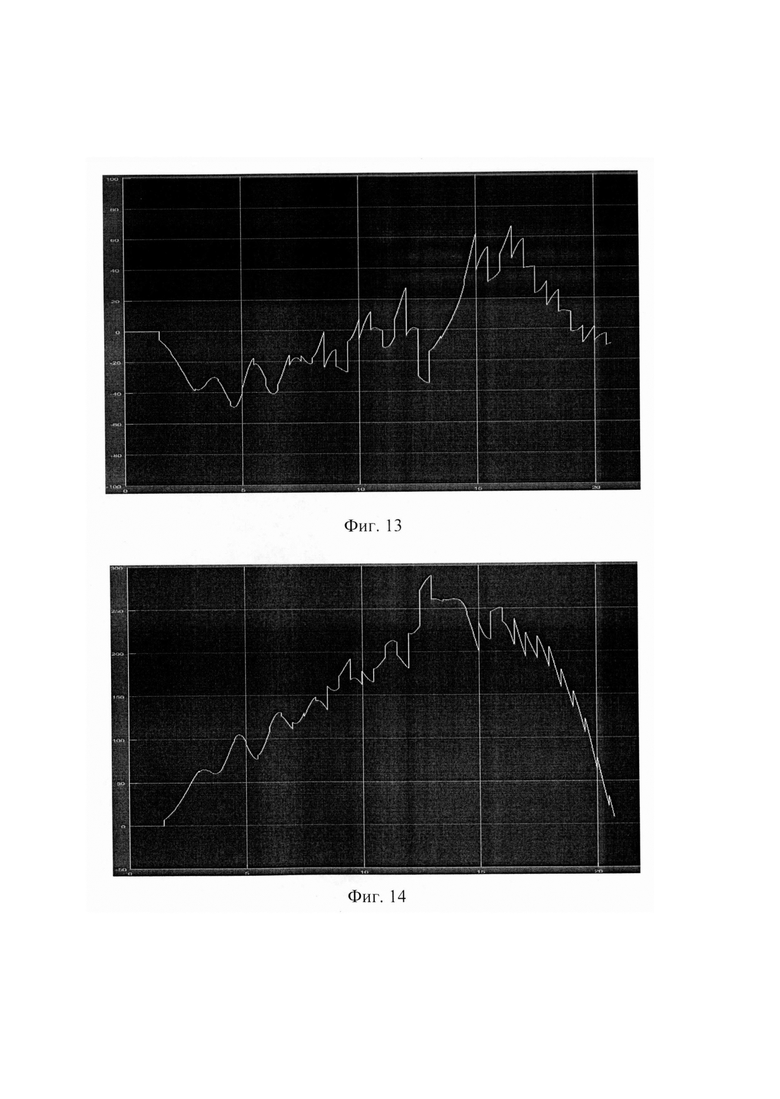
Таким образом разработанная пространственная имитационная модель системы управления ЛА позволяет анализировать особенности наведения ЛА на различные типы целей, в том числе интенсивно-маневрирующие (фиг. 5-14), а возможность изменять параметры передаточных функций позволяет определять требуемые параметры устройств для повышения точности наведения в конкретных тактических ситуациях.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Стрельба зенитными ракетами /Неупокоев Ф.К. М., Воениздат, 1991. 343 с.
2. Динамика полета зенитных управляемых ракет /Артамонов В.В., Кириченко В.Д., Комаров Д.М. и др. Киев., КВАИУ, 1966. 364 с.
3. Основы построения зенитных ракетных комплексов /Кун А.А. М., Воениздат, 1985.343 с.
4. Математическая морфология. Электронный математический и медико-биологический журнал - Т. 10 Вып. 2. - 2011. УДК 623.451 Пространственная имитационная модель контара теленаведения ЗУР для исследования стрельбы в движении. Желнин А.А.
5. Справочник по радиолокации /М. Сколник, Советское радио, 1970. 454 с.
6. Статистическая теория радиолокации протяженных целей /Островитянов Р.В., Басалов Ф.А. М., Радио и связь, 1982. - 232 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ, ПРЕДНАЗНАЧЕННОЙ ДЛЯ ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ ПРОТИВНИКА | 2011 |
|
RU2488769C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ | 2011 |
|
RU2489675C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ МАНЕВРЕННЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2818981C1 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ СТАНЦИЙ АКТИВНЫХ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ САМОЛЕТОВ САМОНАВОДЯЩИМСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2506522C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ВОЗДУШНОЙ ЦЕЛИ ПО ЕЕ УСТАНОВЛЕННОЙ СКОРОСТИ | 2013 |
|
RU2558407C2 |
| СПОСОБ УПРАВЛЕНИЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ СРЕДНЕЙ ДАЛЬНОСТИ С АКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПРИ НАВЕДЕНИИ НА ГРУППОВУЮ СОСРЕДОТОЧЕННУЮ ЦЕЛЬ | 2012 |
|
RU2570115C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке комплексов и систем малой дальности с теленаведением летательного аппарата на цель. Изобретение предназначено для проведения анализа особенностей наведения ЛА на различные типы целей, в том числе интенсивно-маневрирующие, с возможностью коррекции параметров элементов системы управления ЛА для определения технических возможностей повышения точности управления в конкретных тактических ситуациях без проведения натурных экспериментов. Модель основана на использовании передаточных функций контура управления ЛА малой дальности. Сущность модели состоит в том, что команды управления ЛА вырабатываются в двух взаимно независимых каналах (азимут и угол места), а в качестве исходной информации на вход модели подается смесь из угловых координат цели и углового шума, вырабатываемого отдельной радиолокационной моделью цели. Полученные таким образом параметры траектории наведения позволят с достаточной точностью и достоверностью анализировать особенности наведения на различные типы воздушных целей в различных тактических ситуациях. 16 ил.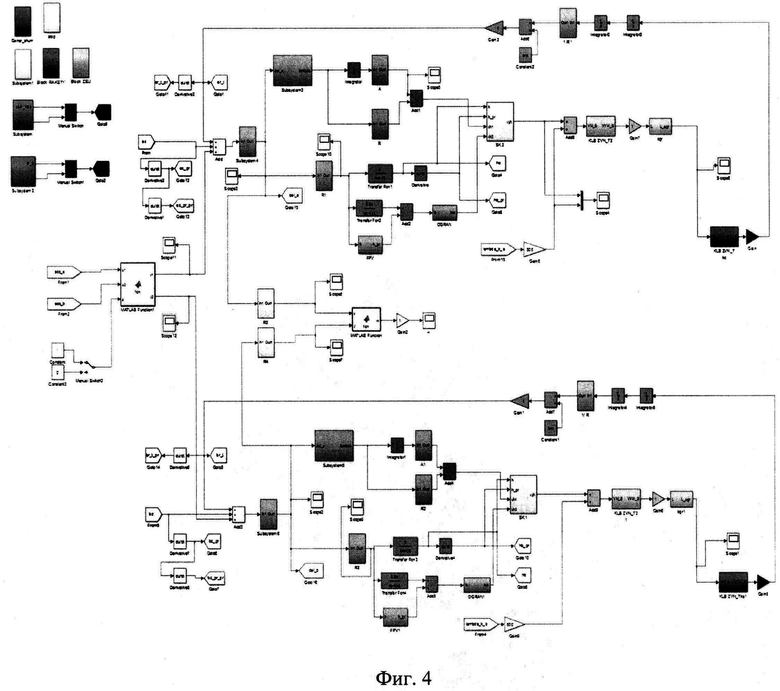
Пространственная имитационная модель системы управления автоматическим маневренным летательным аппаратом, включающая в себя канал выработки команд управления в вертикальной плоскости наведения, на вход которого поступает координата угла места цели, которая, проходя через сумматор, преобразуется в угловое отклонение траектории полета ЛА от кинематической траектории, преобразуемое путем умножения на программную функцию дальности до ЛА в линейное отклонение ЛА, далее поступает на вход устройств, предназначенных для вывода ЛА на кинематическую траекторию, откуда после срабатывания схемы переключения режимов «вывод - наведение» на вход устройств режима «наведения» и далее после сложения с командой компенсации динамической ошибки наведения через устройство ограничения максимальных команд управления на вход системы «автопилот - ЛА» и через кинематическое звено на сумматор, замыкая обратную связь, отличающаяся от известной тем, что выработка команд управления ЛА происходит также и в горизонтальной плоскости наведения, а на вход каналов управления поступает аддитивная смесь текущих угловых координат цели и углового шума, вырабатываемого моделью углового шума цели раздельно для плоскостей наведения, команды компенсации динамических ошибок наведения вырабатываются в двух каналах управления, а совместный пересчет команд управления с учетом скручивания производится в преобразователе исполнительной системы координат.
| СПОСОБ УПРАВЛЕНИЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ СРЕДНЕЙ ДАЛЬНОСТИ С АКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПРИ НАВЕДЕНИИ НА ГРУППОВУЮ СОСРЕДОТОЧЕННУЮ ЦЕЛЬ | 2012 |
|
RU2570115C2 |
| Пресс для прессования керамических капселей | 1961 |
|
SU144759A1 |
| Стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов | 2016 |
|
RU2632546C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| US 8563908 B1, 22.10.2013. | |||

