Изобретение относится к области автоматического управления динамическими объектами и может быть использовано для создания систем автоматического управления движением динамического объекта, обеспечивающим его перемещение по требуемой траектории или в заданную точку по требуемой траектории без предъявления требований к траекторной скорости.
Известен способ управления динамическим объектом, когда при возникновении отказа в канале измерения координаты объекта полученное ранее (до момента возникновения отказа) значение координаты корректируется по дискретно-разностному уравнению, приближенно описывающему динамику объекта (Майоров А.В, Москатов Г.К., Шибанов Г.П. Безопасность функционирования автоматизированных объектов. - М.: Машиностроение, 1988. - с. 96-97).
Признаками этого аналога, совпадающими с признаками заявляемого способа управления, является то, что при возникновении отказа в канале измерения координаты динамического объекта значение координаты вычисляется (оценивается) по модели объекта.
Причиной, препятствующей достижению в аналоге технического результата, обеспечиваемого заявляемым изобретением, является низкая точность движения динамического объекта, которая обусловлен на тем, что координату объекта вычисляют (оценивают) по упрощенной модели объекта - дискретно-разностному уравнению приближенно описывающему его динамику.
Наиболее близким к заявляемому изобретению (прототипом) является способ управления, который реализуется на системе управления типовой структуры, состоящей из устройства управления (преобразователи, вычислители, двигатели), объекта управления (наземный мобильный робот) и датчика положения объекта (приемник спутниковой навигационной системы), замкнутой обратной связью по положению объекта и дополненной тремя блоками: блоком определения целостности навигационных данных, блоком переключения режима работы и блоком модели объекта управления.
Способ заключается в следующем. Датчик положения объекта постоянно определяет координаты объекта управления. Блок определения целостности контролирует изменение и определяет целостность(точность и согласованность)данных об определенных координатах. По управляющему воздействию на объект управления, используя модель объекта, вычисляют его координаты. При целостности данных об определенных координатах объекта управления, в обратную связь системы управления подают определенные координаты объекта и управляющее воздействие формируют по разности координат, заданных требуемой траекторией движения и определенных координат объекта. При ошибочности данных об определенных координатах объекта управления, в обратную связь системы управления подают координаты объекта, вычисленные по его модели. Следовательно, при ошибочности данных об определенных координатах объекта, управляющее воздействие формируют по разности координат, заданных требуемой траекторией движения и координат, вычисленных по модели объекта. (Киселев С.К., Чан В.Т. Управление движением наземного мобильного робота при нарушении целостности навигационных данных спутниковой навигационной системы / Автоматизация процессов управления. - 2021. - № 2 (64). - С. 4-12).
Признаками прототипа, совпадающими с признаками заявляемого способа управления, является то, что
1. постоянно определяют координаты объекта управления;
2. контролируют изменение и определяют целостность данных об определенных координатах объекта управления;
3. по управляющему воздействию на объект управления, используя его модель, вычисляют координаты объекта управления;
4. управляющее воздействие на объект управления формируют по разности координат, заданных требуемой траекторией движения, и координат, вычисленных по модели объекта.
Недостатком, препятствующими достижению в прототипе технического результата, обеспечиваемого заявляемым изобретением, является низкая точность движения динамического объекта по требуемой пространственной траектории, которая обусловлена тем, что модель объекта, которая используется для вычисления его координат, статическая (модель структура и параметры которой в процессе управления не изменяются) и не учитывает влияние на реальный объект управления неконтролируемых возмущающих воздействий (помех). Поэтому значения координат, вычисленных по статической модели объекта, и определенных координат объекта управления, в общем случае, отличаются. Это приводит к тому, что управляющее воздействие, формирующееся по разности координат, заданных требуемой траекторией движения объекта и координат, вычисленных по статической модели объекта, не обеспечивает точное движение объекта по требуемой пространственной траектории.
Так же, из-за отличия определенных и вычисленных координат объекта управления, в моменты переключения с формирования управляющего воздействия по определенным координатам на координаты, вычисленные по модели (так же, как и при обратном переключении - с формирования управляющего воздействия по вычисленным координатам на определенные координаты) будут происходить резкие изменения (скачки) управляющего воздействия, которые приведут к нарушению плавности движения объекта управления и вызовут дополнительные динамические погрешности движения по требуемой траектории.
Задачей изобретения является повышение точности движения динамического объекта по требуемой пространственной траектории.
Техническим результатом изобретения является уменьшение погрешностей отклонения динамического объекта от требуемой пространственной траектории движения.
Для достижения указанного технического результата при управлении постоянно определяют координаты объекта управления, контролируют изменение и определяют целостность данных об определенных координатах объекта управления, по управляющему воздействию на объект управления, используя его модель, вычисляют координаты объекта управления, управляющее воздействие формируют по разности координат, заданных требуемой траекторией движения, и координат, вычисленных по модели объекта. При этом в процессе управления модель объекта управления настраивают так, чтобы при целостности данных об определенных координатах объекта управления, минимизировать разность между определенными и вычисленными по модели координатами объекта управления для чего, при целостности данных об определенных координатах объекта управления, на модель подают настраивающее воздействие, которое формируют по разности определенных и вычисленными по модели координат объекта управления, а, при ошибочности данных об определенных координатах объекта управления, настраивающее воздействие на модель не подают.
Таким образом, уменьшение погрешностей отклонения динамического объекта от требуемой пространственной траектории движения достигается, во-первых, настройкой модели объекта поцелостным (точным и согласованным) координатам объекта. Координаты объекта, вычисленные по его настроенной модели, будут более точны, чем вычисленные по статической модели объекта управления, не учитывающей действие на объект неконтролируемых возмущающих воздействий. Следовательно, управляющее воздействие, сформированное по разности координат заданных требуемой траекторией движения объекта и координат объекта, вычисленных по его настроенной модели, обеспечит уменьшение погрешностей движения динамического объекта по требуемой пространственной траектории.
Во-вторых, уменьшение погрешностей отклонения динамического объекта от требуемой пространственной траектории движения в заявляемом способе достигается тем, что управляющее воздействие в нем постоянно формируют по разности заданных требуемой траектории движения координат и координат объекта, вычисленных по его настроенной модели, без переключения на определяемые координаты объекта. Это позволяет исключить резкие изменения (скачки) управляющего воздействия, которые вызывают дополнительные динамические погрешности движения объекта по требуемой пространственной траектории.
Анализ заявляемого технического решения показывает, что совокупность, последовательность и условия выполнения предлагаемых в способе операций не следуют явным образом из известного уровня техники, поэтому являются новыми и имеют изобретательский уровень.
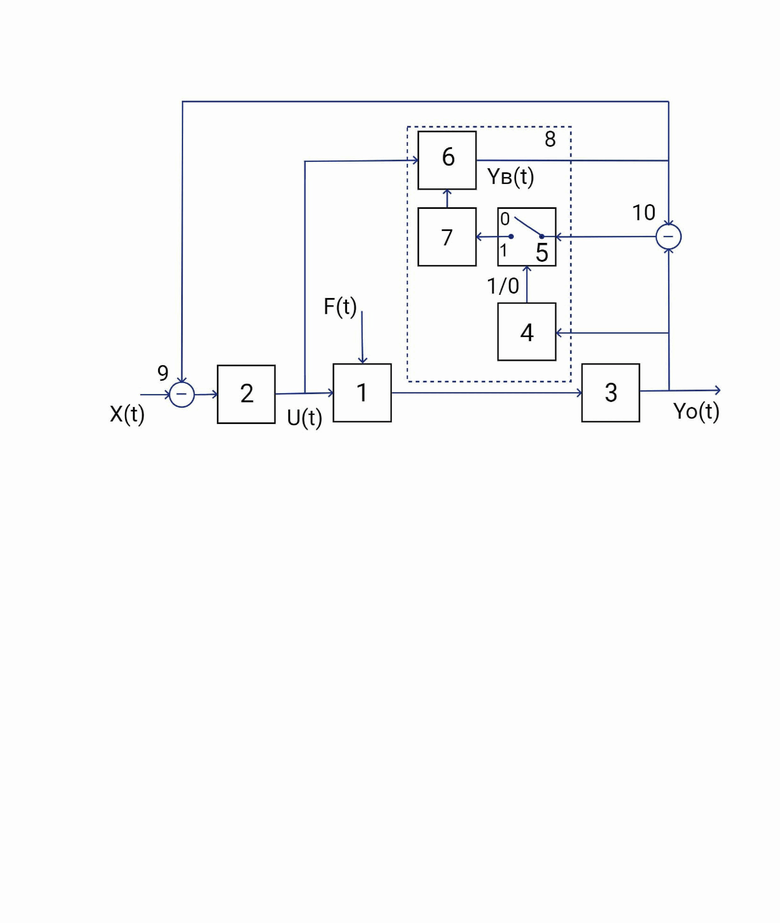
Сущность изобретения поясняется чертежом, где представлена структурная схема системы управления для реализации заявляемого способа управления движением динамического объекта по пространственной траектории.
Система управления содержит объект 1 управления (например, беспилотный аппарат - наземный, летательный, водный), устройство 2 управления (преобразователи, вычислители, двигатели идр.), устройство 3 определения положения объекта 1 (инерциальная навигационная система, радиотехническая навигационная система, подводная акустическая система позиционирования и др.), блок 4 определения целостности данных о полученных с устройства3 координатах объекта 1, управляемый ключ 5, блок 6 настраиваемой модели объекта управления, блок 7 настройки модели. Блоки 4, 5, 6, 7, выделенные на чертеже, могут быть реализованы на отдельных цифровых устройствах (микроконтроллерах, одноплатных микрокомпьютерах и т.п.), либо математические и логические операции, выполняемые ими, могут быть реализованы программно на одном цифровом устройстве (микроконтроллере, одноплатном микрокомпьютере) 8. Сравнение (определение разности) сигналов в системе обеспечивается устройствами 9 и 10. Кроме того, на чертеже обозначены: X(t) - требуемая траектория движения объекта 1 управления(требуемые координаты объекта в заданные моменты времени); U(t) - управляющее воздействие на объект 1; F(t) - неконтролируемое возмущающее воздействие (помеха), действующая на объект 1; Yo(t) - определенные координаты объекта 1 управления, Yв(t) - вычисленные по модели координаты объекта 1 управления.
Блок 4 реализует программно один из известных алгоритмов внутреннего автономного контроля целостности (ReceiverAutonomousIntegrityMonitoring, RAIM) навигационных данных (оценок максимального отличия решения, сравнения дальности, сравнения местонахождения, невязки по методу наименьших квадратов, фильтрационные методы и др. см., например, Иванов, А.В. Автономный контроль целостности навигационных данных спутниковых радионавигационных систем методами сравнения и невязок / А.В Иванов, А.П. Негуляева, С.П. Москвитин // Вестник ТГТУ. - 2016. - Том 22. № 3. - C. 358-367), который позволяет выявить различные виды нарушений целостности определенных координат объекта управления 1, вызываемые различными причинами, например, сбоями и помехами в устройстве 3.
Результатом работы блока 4 является подача с него на управляющий вход управляемого ключа 5 или сигнала «1»,подтверждающего целостность определенных устройством 3 координат объекта 1, или сигнала "0",свидетельствующего об ошибочности этих данных. При подтверждении блоком 4 целостности данных об определенных координатах объекта 1 (сигнал «1» с блока 4)ключ 5 замыкается и блок7 формирует по разности определенных Yo(t) и вычисленных по модели Yв(t) координат объекта 1 управления настраивающее воздействие, которое поступает на блок 6 модели. При ошибочности данных об определенных координатах (сигнал «0» с блока 4) ключ 5 разомкнут, настраивающее воздействие блоком 7 не формируется и на блок 6 не подается.
Блок 6 реализует программно модель объекта 1 управления, которая описывает его движение при подаче управляющего воздействия U(t). Вид модели зависит от конкретного объекта, управление которым реализуется. Модель содержит настраиваемые параметры, которые могут изменяться в процессе работы системы. Изменение настраиваемых параметров модели в блоке 6 проводится сигналом с блока 7 настройки модели одним из известных методов настройки (см., например, Адаптивные системы автоматического управления: Учеб. пособие / В.Н. Антонов, А.М. Пришвин, В.А. Терехов, А.Э. Янчевский / Под ред. В.Б. Яковлева. - Л.: Изд-во Ленингр. ун-та, 1984. - С. 56-59).
Предлагаемый способ управления движением динамического объекта реализуется следующим образом.
При движении динамического объекта 1 управления по требуемой траектории X(t) его координаты Yo(t)постоянно определяются устройством 3.Полученные устройством 3 данные о координатах Yo(t) объекта 1 управления оцениваются блоком 4 на целостность.
Нарушение целостности данных об определенных координатах Yo(t) объекта 1 может случаться из-за различных причин в зависимости от типа используемого устройства 3 определения положения объекта. Например, в случае использования спутниковой радионавигационной системы - из-за недоступности необходимого числа спутников, ионосферных и тропосферных задержек прохождения сигнала, многолучевого приема и ряда других факторов (см. Беспроводные технологии на автомобильном транспорте / Глобальная навигация и определение местоположения транспортных средств // Учеб. Пособие / В. М. Власов, Б. Я. Мактас, В. Н. Богумил, И. В. Конин; Москва. - ИНФРА, 2018. - С. 58-71), в случае навигационной системы на основе доплеровского измерителя скорости и угла сноса ошибки измерения навигационных параметров происходят при кратковременном пропадании отраженного сигнала или из-за попадания объекта на слепые высоты, (см. Кудрявцев, А. Ю. Авиационные радиоэлектронные системы самолёта дальней авиации. Авиационные радионавигационные устройства и системы: учеб. пособие для курсантов ЧВВАУШ (ВИ) / А. Ю. Кудрявцев, А. М. Хаютин, А. Ю. Карманов; ЧВВАУШ (ВИ). - Челябинск: ЧВВАУШ (ВИ), 2011., Ч. I. - С. 11 - 112) и т.д.
Движение динамического объекта 1 управления по требуемой траектории X(t) задается управляющим воздействием U(t) с блока 2.
Управляющее воздействие U(t) с блока 2 также подается на блок 6 модели объекта управления, который по нему вычисляет координаты Yв(t) объекта 1 управления.
Управляющее воздействие U(t) формируется блоком 2 по разности координат, заданных требуемой траекторией движения X(t), и координат Yв(t), вычисленных блоком 6 по U(t). Таким образом, при движении динамического объекта 1 управления под действием управляющего воздействия U(t) с блока 2 его вычисленные координаты Yв(t) будут стремиться к координатам требуемой траектории движения X(t).
При движении объекта 1 по требуемой траектории X(t) на него действуют неизвестные возмущающие воздействия (помехи) F(t) (для наземного беспилотного аппарата это могут быть, например, проскальзывания колес или движение по наклонной плоскости, для летательного аппарата - воздействия ветра, для водного - течений и т.д.). Под действием возмущающего воздействия F(t) координаты Yo(t) объекта 1 управления могут изменяться заранее неизвестным образом, поэтому, в общем случае, определенные устройством 3 координаты Yo(t) объекта 1 отличаются от вычисленных блоком 6 координат Yв(t) и на выходе устройства 10 сравнения появляется рассогласование, равное разности вычисленных и определенных координат объекта Yв(t)-Yo(t).
По параметрам этого рассогласования (величине, знаку, скорости изменения и т.п.) блок 7 настройки параметров модели формирует воздействие на модель в блоке6,изменяющее параметры модели так, чтобы минимизировать возникшее рассогласование Yв(t)-Yo(t). Параметры модели в блоке 6 настраиваются до тех пор, пока рассогласование Yв(t)-Yo(t) не станет равным нулю (или допустимому малому значению). При Yв(t)-Yo(t) = 0 значение вычисленных блоком 6 по модели объекта координат Yв(t) равно значению определяемых устройством 3 координат Yo(t).
Настройку модели в блоке 6 проводят только по целостным определенным координатам Yo(t) объекта управления 1. Для этого управляемый ключ 5 замыкается сигналом «1» на выходе блока 4, когда целостность определенных координат Yo(t) подтверждена, и значение рассогласования Yв(t)-Yo(t) подается на блок 7 настройки модели, который по нему формирует настраивающее воздействие U(t) на блок 6 модели.
В случае определения блоком 4 ошибочности данных об определенных координатах Yo(t) объекта 1 управления , на управляемый ключ 5 подается сигнал «0», ключ 5 не замыкается, рассогласование Yв(t)-Yo(t) не подается на блок 7 настройки модели, соответственно, настраивающее воздействие на модель блока 6 не оказывается. Поэтому координаты Yo(t), целостность которых не подтверждена блоком 7 на настройку модели не влияют.
После завершения настройки модели в блоке 6, устанавливается режим работы системы при котором значения определяемых устройством 3целостных координат Yo(t) объекта управления 1 и координат Yв(t) вычисленных блоком 6 по модели близки (или совпадают). Это позволяет формировать управляющее воздействие U(t) по координатам Yв(t) объекта 1, а приведение вычисленных координат Yв(t) объекта 1 к координатам, задаваемым требуемой траекторией движения X(t), обеспечивает также приведение определяемых координат Yo(t) к X(t).
Исключение переключения при формировании управляющего воздействия U(t) с определяемых координат Yo(t) на вычисляемые Yв(t) при возникновении ошибочности координат Yo(t) (и обратного переключения с Yв(t) на вычисляемые Yo(t) при восстановлении целостности Yo(t)) позволяет исключить резкие изменения управляющего воздействия U(t) и избежать дополнительных динамических погрешностей при движении объекта 1 по пространственной траектории X(t).
Так как управляющее воздействие U(t) постоянно формируется по разности координат задаваемых требуемой траекторией движения X(t) и координат Yв(t), вычисленных блоком 6 по настроенной модели объекта управления 1, а определяемые устройством 3 координаты Yo(t) в заявляемом способе для этого не используются, то различные виды нарушений целостности определенных координат Yo(t) объекта 1 управления, например, вызванные сбоями и помехами в устройстве 3, не приведут к возникновению погрешностей отклонения движения динамического объекта 1 от требуемой пространственной траектории движения X(t).
Таким образом, достигается повышение точности движения динамического объекта по требуемой пространственной траектории.
Приведенные сведения о структурной схеме системы управления для реализации заявляемого способа управления движением динамического объекта по пространственной траектории, примеры реализации ее элементов и описание функционирования при реализации заявляемого способа подтверждают достижимость технического результата изобретения и промышленную применимость изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| УСТРОЙСТВО ТРЕХМЕРНОГО СКАНИРОВАНИЯ СЦЕНЫ С НЕЛАМБЕРТОВЫМИ ЭФФЕКТАМИ ОСВЕЩЕНИЯ | 2014 |
|
RU2573767C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2321045C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРОВЕРКИ ФУНКЦИОНИРОВАНИЯ ИНЕРЦИАЛЬНОГО БЛОКА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2009 |
|
RU2483281C2 |
| Способ наблюдения за аэродромным движением и устройство для его осуществления | 2022 |
|
RU2785810C1 |
Изобретение относится к области автоматического управления динамическими объектами и может быть использовано для создания систем автоматического управления движением динамического объекта, обеспечивающим его перемещение по требуемой траектории или в заданную точку по требуемой траектории без предъявления требований к траекторной скорости. В способе управления постоянно определяют координаты объекта управления, контролируют изменение и определяют целостность данных об определенных координатах объекта управления, по управляющему воздействию на объект управления, используя его модель, вычисляют координаты объекта управления, управляющее воздействие формируют по разности координат, заданных требуемой траекторией движения, и координат, вычисленных по модели объекта. При этом в процессе управления модель объекта управления настраивают так, чтобы при целостности данных об определенных координатах объекта управления минимизировать разность между определенными и вычисленными по модели координатами объекта управления, для чего, при целостности данных об определенных координатах объекта управления, на модель подают настраивающее воздействие, которое формируют по разности определенных и вычисленных по модели координат объекта управления, а при ошибочности данных об определенных координатах объекта управления настраивающее воздействие на модель не подают. Технический результат - повышение точности движения динамического объекта по требуемой пространственной траектории. 1 ил.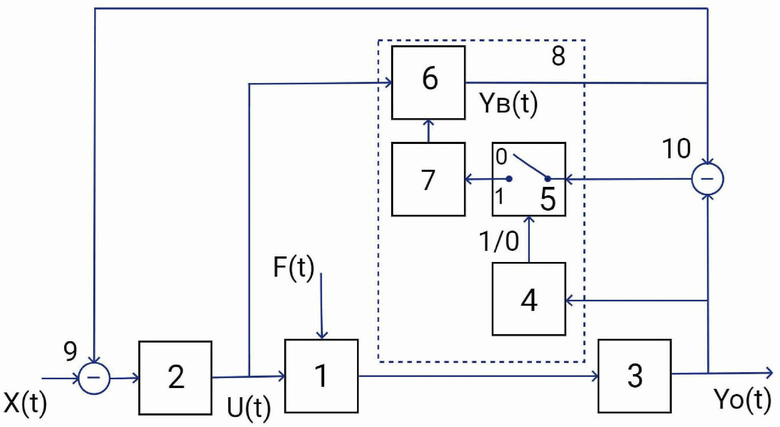
Способ управления движением динамического объекта по пространственной траектории, заключающийся в том, что постоянно определяют координаты объекта управления, контролируют изменение и определяют целостность данных об определенных координатах объекта управления, по управляющему воздействию на объект управления, используя его модель, вычисляют координаты объекта управления, управляющее воздействие на объект управления формируют по разности координат, заданных требуемой траекторией движения, и координат, вычисленных по модели объекта, отличающийся тем, что в процессе управления модель объекта управления настраивают так, чтобы при целостности данных об определенных координатах объекта управления минимизировать разность между определенными и вычисленными по модели координатами объекта управления, для этого при целостности данных об определенных координатах объекта управления на модель подают настраивающее воздействие, которое формируют по разности определенных и вычисленных по модели координат объекта управления, а при ошибочности данных об определенных координатах объекта управления настраивающее воздействие на модель не подают.
| Киселев С.В., Чан В.Т | |||
| статья "Управление движением наземного мобильного робота при нарушении целостности навигационных данных спутниковой навигационной системы" | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| ЭТАЛОННЫЙ ЭЛЕКТРИЧЕСКИЙ КОНДЕНСАТОР ПОСТОЯННОЙЕМКОСТИ | 0 |
|
SU209590A1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| US | |||

