Изобретение относится к способам определения координат движущихся объектов.
Известен, как аналог изобретения, способ определения местоположения объекта и устройство для его осуществления. Способ заключается в создании магнитного поля излучателем и регистрации его приемником, координаты которого рассчитывают в созданном излучателем магнитном поле по измеренным приемником значениям магнитной индукции. Способ предназначен для определения местоположения объекта с установленным на него приемником в искусственно создаваемом магнитном поле. Он пригоден только для определения в магнитном поле координат объекта, заранее оборудованного приемником [1].
Известен способ определения координат неизвестного объекта, принимаемый за прототип изобретения, включающий измерение модуля вектора напряженности магнитного поля объекта с помощью датчика - модульного магнитометра, установленного на подвижном (движущемся) носителе (наблюдателе) в четырех точках местоположения носителя, решение аналитической задачи относительного перемещения неизвестного объекта на плоскости при известных параметрах движения носителя и величине изменения полученных данных измерения, с сопоставлением полученных данных измерения с известным законом их изменения с изменением относительного взаимоположения носителя и объекта [2].
Способ имеет достоинства, заключающиеся в том, что для его осуществления нужно иметь только датчик - модульный магнитометр, а модуль вектора магнитной индукции наблюдаемого объекта и изменения его в зависимости от расстояния, которые фиксируются магнитометром, мало подвержены искусственным помехам, что повышает достоверность классификации наблюдаемого объекта.
Недостатки способа состоят:
- в определении только координат объекта, считающегося неподвижным;
- в получении двойственных координат - действительных и фиктивных, для распознавания которых требуются дополнительные действия, например, измерение направления на объект.
Целью изобретения является разработка способа локализации (контроля) движущегося объекта с помощью датчика - модульного магнитометра, установленного на подвижном носителе, с определением действительных координат объекта, а также параметров его движения - курса и скорости.
Поставленная цель достигается благодаря тому, что предлагается способ определения координат и параметров движения источника магнитного поля в горизонтальной плоскости на подвижном носителе, совершающим движение в горизонтальной плоскости, включающий:
регистрацию и измерение модуля вектора напряженности магнитного поля объекта - источника магнитного поля модульным магнитометром носителя,
решение аналитической задачи относительного перемещения объекта на плоскости при известных параметрах движения носителя и величине изменения вектора напряженности магнитного поля объекта,
сопоставление вектора напряженности магнитного поля объекта с известным законом его изменения при изменении относительного взаимоположения носителя и объекта,
решение задачи относительного перемещения объекта и носителя на плоскости.
Дополнительно на носителе выполняют следующие действия:
фиксируют координаты текущего положения носителя при выполнении каждого измерения модуля вектора напряженности магнитного поля объекта,
осуществляют произвольное маневрирование носителя с хотя бы одним изменением курса и/или скорости,
выполняют измерения модуля вектора магнитной индукции объекта в пяти или более произвольно расположенных точках по трассе движения носителя и соотносят их с координатами носителя,
решают аналитическую задачу баланса относительного взаимоположения носителя, объекта - источника магнитного поля и закона ослабления модуля вектора магнитной индукции с изменением расстояния между носителем и источником.
Сущность предлагаемого изобретения состоит в определении координат и параметров движения движущихся объектов с помощью датчика - модульного магнитометра, установленного на подвижном носителе, путем последовательного измерения модуля вектора магнитной индукции в не менее, чем пяти точках (позициях) нахождения носителя при известных параметрах его движения, с хотя бы одним изменением курса и/или скорости в период измерений.
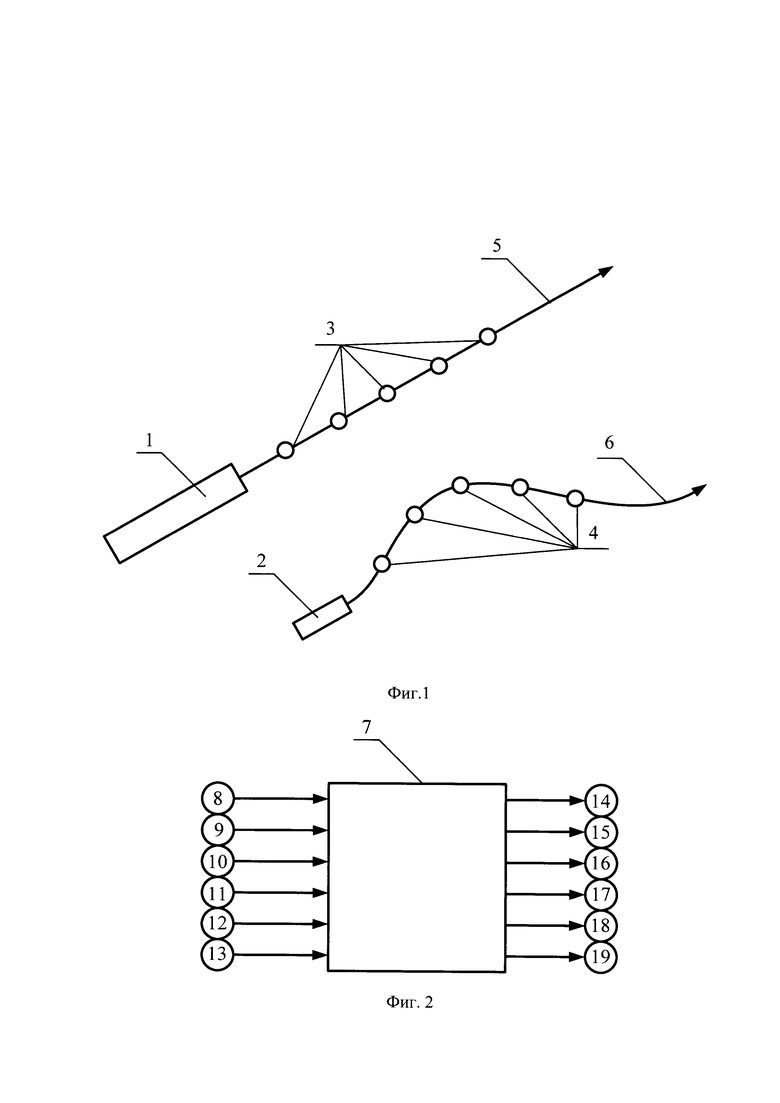
Техническая реализация способа поясняется фиг.1 и состоит в выполнении движущимся наблюдателем не менее пяти замеров модуля вектора магнитной индукции Hi (i=1, …, N; N≥5) в позициях (точках) его нахождения с координатами (xi,yi). Цифрами на фиг. 1 обозначены: 1 – объект - источник магнитного поля, 2 - носитель модульного магнитометра (наблюдатель), 3 - координаты объекта в моменты измерения его модуля вектора магнитной индукции, 4 - координаты наблюдателя в моменты измерения модуля вектора магнитной индукции объекта, 5 - траектория движения объекта, 6 - траектория произвольного движения наблюдателя.
Уровень модуля вектора магнитной индукции подчиняется закону Био-Савара-Лапласа [3]:

где r - текущее расстояние (дистанция) между наблюдателем и объектом;
k - некоторый коэффициент.
Знание соотношения (1) позволяет составить систему уравнений, связывающих измерения модуля вектора магнитной индукции в нескольких точках траектории носителя. Первое траекторное измерение i=1 при нахождении носителя датчика в точке с координатами (х1, у1) приводит к уравнению:

где Xz,0, Yz,0 - начальные координаты подвижного объекта.
Второе уравнение для точки i=2 (х2, у2) с учетом движения объекта:

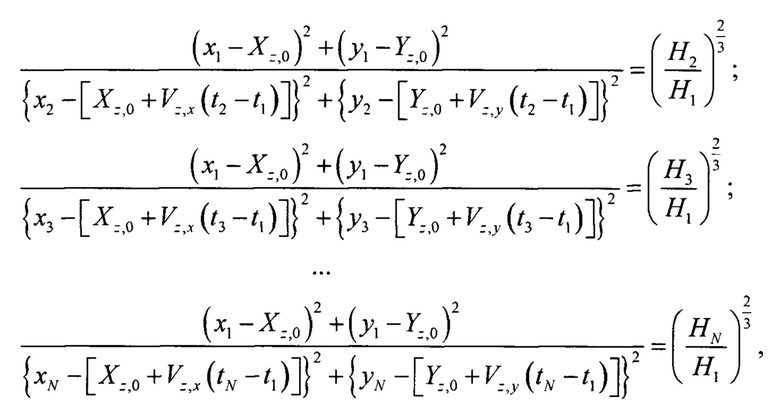
В целом N измерений приводят к системе уравнений:
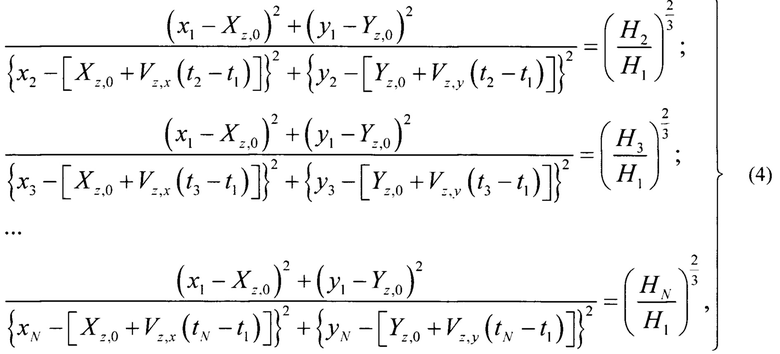
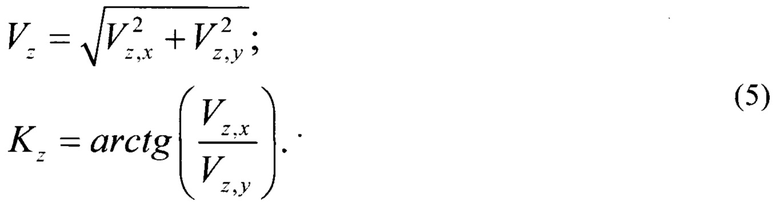
где Xz,0, Yz,0 - координаты объекта в момент первого измерения модуля вектора магнитной индукции; Vz,x, Vz,y - параметры движения объекта (Vz, Kz) в проекциях на оси координат:
Для однозначного определения координат и дополнительного определения параметров движения (курса и скорости) объекта необходимо:
1) выполнить маневр наблюдателя с хотя бы одним изменением курса и (или) скорости наблюдателя;
2) выполнить не менее пяти (N≥5) измерений модуля вектора магнитной индукции.
На фиг. 2 показан счетно-решающий прибор, с помощью которого вычисляют координаты и параметры движения объекта. Цифрами обозначены: 7 - счетно-решающий прибор, 8 - текущее время ti, 9 - текущее значение координаты наблюдателя xi, 10 - текущее значение координаты наблюдателя yi, 11 - текущее значение измерения Hi, 12 - текущее значение скорости наблюдателя VHi, 13 - текущее значение курса наблюдателя KHi, 14 - расчетное значение Xz,0, 15 - расчетное значение Yz,0, 16 - расчетное значение - проекции скорости объекта на ось X, 17 - расчетное значение Vzy - проекции скорости объекта на ось Y, 18 - расчетное значение координаты объекта Xzi, 19 - расчетное значение координаты объекта Yzi.
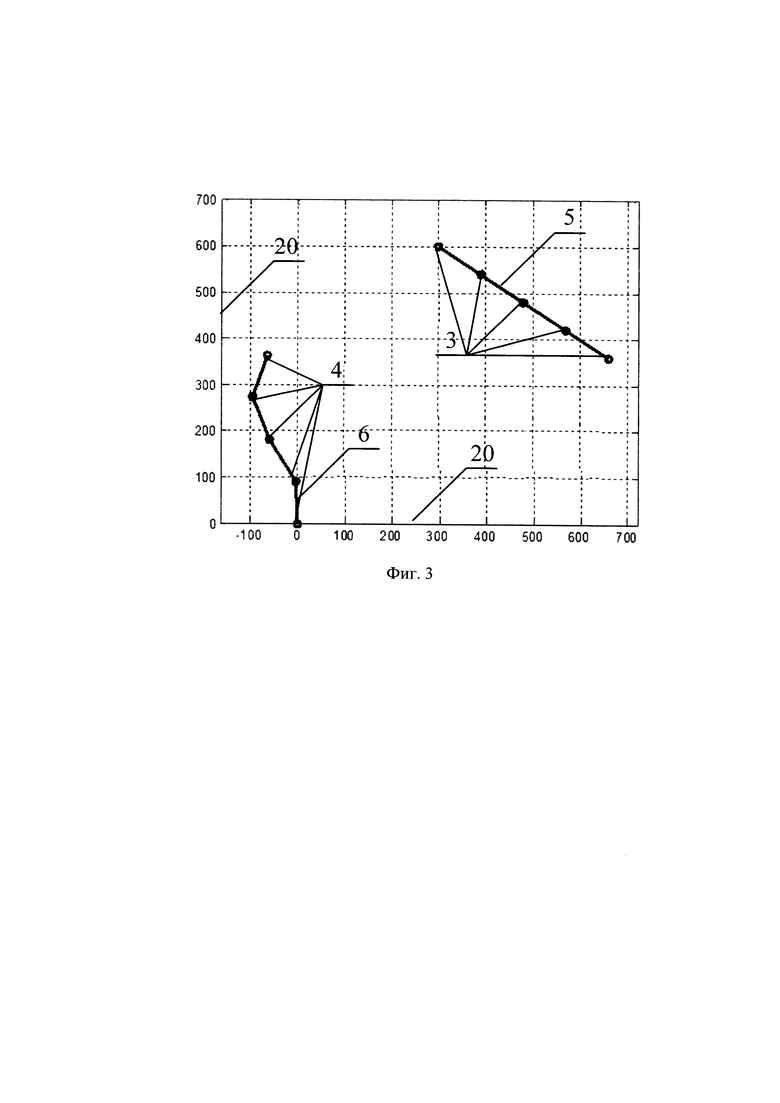
На фиг. 3 показан пример аналитического решения задачи и его графического отображения с применением программы MatLab. Цифрой 20 обозначены оси координат.
Техническим результатом изобретения является способ определения координат и параметров движения источника магнитного поля, обеспечивающий определение координат и параметров движения объекта наблюдения по измеряемым данным его модуля вектора магнитной индукции, значениям текущих координат наблюдателя в моменты измерений, а также при выполнении наблюдателем маневрирования в ходе измерений.
Источники информации, использованные при выявлении изобретения
1. Патент на изобретение RU 2690526. Способ определения местоположения объекта и устройство для его осуществления / С.И. Шмелев. М.: ФИПС, 2019. Бюл. №16.
2. Патент на изобретение RU 2452652. Способ определения координат источника магнитного поля (варианты) / В.И. Поленин, А.В. Новиков, Р.В. Долбилин, А.В. Румянцев. М: ФИПС, 2012. Бюл. №16.
3. Семевский Р.Б., Аверкиев В.В., Яроцкий В.А. Специальная магнитометрия. СПб: Наука, 2002. - 228 с.
Изобретение относится к способам определения координат движущихся объектов. Техническим результатом является разработка способа локализации движущегося объекта с помощью датчика – модульного магнитометра, установленного на подвижном носителе, с определением действительных координат объекта, а также параметров его движения – курса и скорости. Заявленный способ определения координат и параметров движения источника магнитного поля подвижным носителем, совершающим движение в горизонтальной плоскости, включает регистрацию и измерение модуля вектора напряженности магнитного поля объекта – источника магнитного поля модульным магнитометром носителя в N≥5 произвольно расположенных точках по трассе движения носителя, составление уравнений баланса относительного взаимоположения носителя, объекта – источника магнитного поля и закона Био-Савара-Лапласа ослабления модуля вектора магнитной индукции с изменением расстояния между носителем и источником. Далее осуществляют произвольное маневрирование носителя с хотя бы одним изменением его курса и (или) скорости, решают систему (N-1)≥4 уравнений баланса, в результате чего определяют текущие координаты объекта в любой произвольный момент времени t, курс и скорость объекта. 3 ил.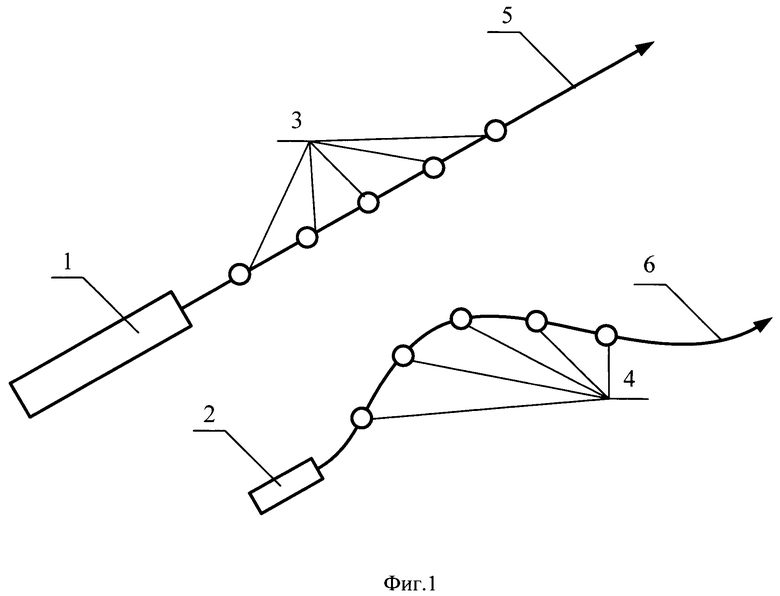
Способ определения координат и параметров движения источника магнитного поля подвижным носителем, совершающим движение в горизонтальной плоскости, включающий регистрацию и измерение модуля вектора напряженности магнитного поля объекта – источника магнитного поля модульным магнитометром носителя, решение аналитической задачи относительного перемещения объекта на плоскости при известных параметрах движения носителя и величине изменения вектора напряженности магнитного поля объекта, сопоставление вектора напряженности магнитного поля объекта с известным законом его изменения при изменении относительного взаимоположения носителя и объекта, решение задачи относительного перемещения объекта и носителя на плоскости, отличающийся тем, что выполняют измерения модуля вектора магнитной индукции объекта в N≥5 произвольно расположенных точках по трассе движения носителя и соотносят их с координатами носителя в N-1 уравнениях баланса, связывающих относительное взаимоположение носителя, объекта – источника магнитного поля и измерений модуля вектора магнитной индукции в соответствии с законом Био-Савара-Лапласа ослабления модуля вектора магнитной индукции с изменением расстояния между носителем и источником, осуществляют произвольное маневрирование носителя с хотя бы одним изменением его курса и (или) скорости для исключения пропорциональности, от уравнения к уравнению, левых частей уравнений баланса, решают систему (N-1)≥4 уравнений баланса:
где xi, уi - координаты наблюдателя в точке i=1, …, N, N≥5; Hi - модуль вектора напряженности магнитного поля объекта в точке i; ti - время i-го измерения;
в результате чего определяют значения четырех неизвестных: Xz,0, Yz,0 - координат объекта в момент первого измерения модуля вектора напряженности магнитного поля объекта; Xz,x, Vz,y - параметров движения объекта в проекциях на оси координат, и с использованием полученных данных определяют текущие координаты объекта в любой произвольный момент времени t

курс и скорость объекта 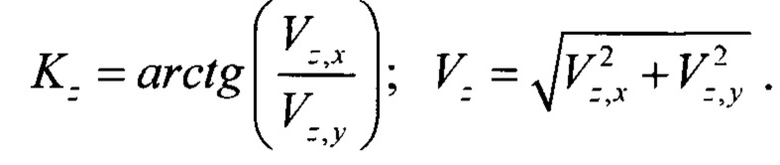
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2010 |
|
RU2452652C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2002 |
|
RU2219497C1 |
| Магнитометрический способ определения координат объекта | 1980 |
|
SU905891A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2690526C1 |
| СПОСОБ (ВАРИАНТЫ) И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2241958C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ МАГНИТНОГО ПОЛЯ | 2019 |
|
RU2713456C1 |
| WO 2017060644 A1, 13.04.2017 | |||
| US 4885536 A, 05.12.1989 | |||
| US 10746819 B2, 18.08.2020. | |||
