Изобретение относится к устройствам для определения координат и параметров движения ферромагнитных объектов, обладающих магнитным полем, например, имеющих ферромагнитный корпус из железа, стали, обладающий намагниченностью в отсутствие внешнего магнитного поля [1].
Известно устройство для измерения координат и определения параметров движения обнаруженного и наблюдаемого объекта (цели) - система самонаведения, являющееся прототипом изобретения [2, с. 158-162]. Ею оснащается подвижный наблюдающий объект (ракета или торпеда) для обнаружения и наблюдения движущейся цели и наведения на нее в процессе наблюдения. Система самонаведения имеет координатор цели в виде угломера, измеряющего только направление на цель, или локатора, измеряющего направление и дистанцию до цели.
Системы самонаведения бывают [2, с. 158-159]:
- в зависимости от характера воспринимаемой энергии - радиотехническими, тепловыми, световыми и акустическими;
- в зависимости от места расположения первичного источника энергии - активными, полу активными и пассивными.
Системы самонаведения реализуют различные методы наведения: погони, прямого наведения, наведения с постоянным углом упреждения или с последовательными упреждениями, различающиеся ориентацией вектора скорости ракеты или торпеды относительно линии визирования обнаруженной и наблюдаемой цели [1, с. 162]. Расчет параметров сложной траектории их наведения обеспечивает счетно-решающий прибор, входящий в состав системы самонаведения.
Недостатком существующих систем самонаведения является их подверженность искусственным помехам со стороны цели, в результате воздействия которых координаты наблюдаемой цели не измеряются и вектор ее скорости не определяется.
Целью изобретения является разработка не подверженного помехам устройства, служащего для определения координат и параметров движения обладающего магнитным полем ферромагнитного объекта и предназначенного для оснащения подвижного наблюдающего (инспектирующего) объекта. Не подверженность помехам достигается, в частности, использованием для наблюдения за ферромагнитным объектом модульного магнитометра, поскольку присущие таким объектам характеристики магнитного поля трудно или невозможно изменить [1].
Поставленная цель достигается благодаря тому, что для оснащения подвижного наблюдающего объекта предлагается устройство для определения координат и параметров движения наблюдаемого ферромагнитного объекта, включающее координатор наблюдаемого объекта и счетно-решающий прибор, отличающееся тем, что, вместо координатора наблюдаемого объекта используются модульный магнитометр и прибор-диспетчер.
Модульный магнитометр необходим для физического обнаружения и наблюдения подвижным наблюдающим объектом искомого ферромагнитного объекта и замера модуля вектора магнитной индукции его магнитного поля.
Прибор-диспетчер обеспечивает выполнение условий для наиболее точного определения координат и параметров движения наблюдаемого объекта, для чего он:
- выдает управляющий сигнал в бортовую систему управления наблюдающего объекта для необходимых изменений его курса и скорости, величина и знак которых обеспечивают повышение точности расчета счетно-решающим прибором координат и параметров движения наблюдаемого объекта;
- определяет число необходимых измерений модуля вектора магнитной индукции объекта магнитометром, обеспечивающих заданную точность расчета счетно-решающим прибором координат и параметров движения наблюдаемого объекта;
- инициирует выдачу данных в счетно-решающий прибор для расчета курса и скорости наблюдающего объекта для выполнения заданного маневра относительно наблюдаемого объекта, например, сближения с ним на заданное расстояние или вплотную.
Точность расчета координат и параметров движения наблюдаемого магнитометром объекта зависит от:
- величины модуля вектора магнитной индукции магнитного поля наблюдаемого объекта, определяемой магнитной массой объекта и расстоянием до него;
- величины и знака изменения курса и/или скорости наблюдающего объекта в период выполнения замеров магнитного поля обнаруженного объекта;
- числа выполненных измерений модуля вектора магнитной индукции магнитного поля обнаруженного объекта.
Признаком точности определения координат и параметров движения наблюдаемого объекта в предположении о его движении постоянными курсом и скоростью является малое изменение расчетных значений параметров движения по мере выполнения измерений модуля вектора магнитной индукции.
Счетно-решающий прибор предназначен для определения:
- координат и параметров движения наблюдаемого объекта;
- траектории подвижного наблюдающего объекта для выполнения заданного маневра относительно наблюдаемого объекта, например, сближения с ним на заданное расстояние или вплотную.
Определение координат и параметров движения наблюдаемого объекта осуществляется путем их вычисления счетно-решающим прибором в результате решения систему уравнений баланса относительного положения и перемещения наблюдающего и наблюдаемого объектов и закона изменения модуля вектора магнитной индукции с изменением расстояния между объектами.
Для расчета координат и параметров движения наблюдаемого объекта выполняется не менее пяти измерений модульным магнитометром модуля вектора магнитной индукции в произвольных точках траектории наблюдающего объекта с хотя бы одним изменением его курса и/или скорости.
Решение системы уравнений баланса относительного положения и перемещения наблюдающего и наблюдаемого объектов и закона изменения модуля вектора магнитной индукции с изменением расстояния между объектами включает следующее.
Известно, что уровень модуля вектора магнитной индукции подчиняется закону Био-Савара-Лапласа [1]:

где r - текущее расстояние (дистанция) между объектами;
k - некоторый коэффициент.
Знание соотношения (1) позволяет составить систему уравнений, связывающих измерения модуля Hi, вектора магнитной индукции в нескольких точках (i=1, …, N) траектории наблюдающего объекта с координатами (xi, yi) наблюдающего объекта и координатами (Xz,i, Yz,i) наблюдаемого объекта. Первое траекторное измерение i=1 при нахождении наблюдающего объекта в точке с координатами (х1, у1) приводит к уравнению:

где Xz,0, Yz,0 - начальные координаты обнаруженного подвижного объекта в момент t1=0 первого измерения его модуля вектора магнитной индукции.
Второе уравнение для другой точки i=2 (х2, у2) с учетом движения объектов имеет вид:

В целом N измерений приводят к системе уравнений:
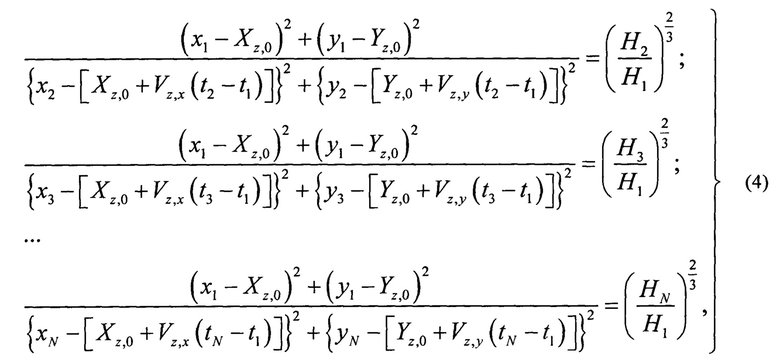
где Xz,0, Yz,0 - координаты обнаруженного объекта в момент t1 первого измерения его модуля вектора магнитной индукции;
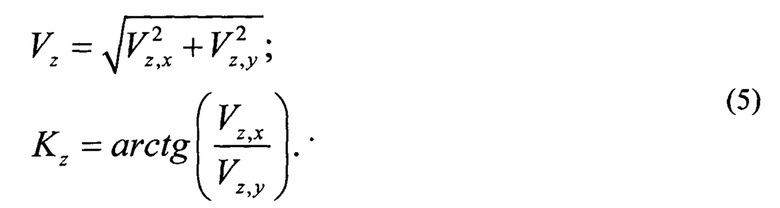
Vz,x, Vz,y - параметры движения обнаруженного объекта (Vz, Kz) в проекциях на оси координат:
В указанных уравнениях приняты следующие обозначения: ti - текущее время, xi и yi - текущие значения координат наблюдающего объекта, Hi - текущее значение модуля вектора магнитной индукции наблюдаемого объекта, Xz,0 и Yz,0 - расчетные значения начальных координат наблюдаемого объекта, Vzx - расчетное значение проекции скорости наблюдаемого объекта на ось X, Vzy - расчетное значение проекции скорости наблюдаемого объекта на ось Y, Xzi и Yzi - расчетные текущие значения координат наблюдаемого объекта.
Для однозначного определения координат и параметров движения (курса и скорости) наблюдаемого объекта требуется выполнить хотя бы один маневр наблюдающего объекта с изменением курса и/или скорости и произвести не менее пяти измерений модуля вектора магнитной индукции.
Таким образом, программа движения наблюдающего объекта для решения счетно-решающим прибором поставленной задачи, реализуемая прибором-диспетчером, должна включать:
- выполнение не менее пяти замеров модуля вектора магнитной индукции Hi(i=1, …, N; N≥5) наблюдаемого объекта в позициях (точках) нахождения наблюдающего объекта с координатами (xi, yi);
- выполнение наблюдающим объектом хотя бы одного изменения его курса и/или скорости, величина и знак которых обеспечивают повышение точности расчета счетно-решающим прибором координат и параметров движения наблюдаемого объекта;
- выполнение наблюдающим объектом количества измерений модуля вектора магнитной индукции магнитного поля наблюдаемого объекта, обеспечивающего заданную точность определения координат и параметров движения наблюдаемого объекта, которая равна величине изменения расчетных значений параметров движения по мере выполнения измерений модуля вектора магнитной индукции.
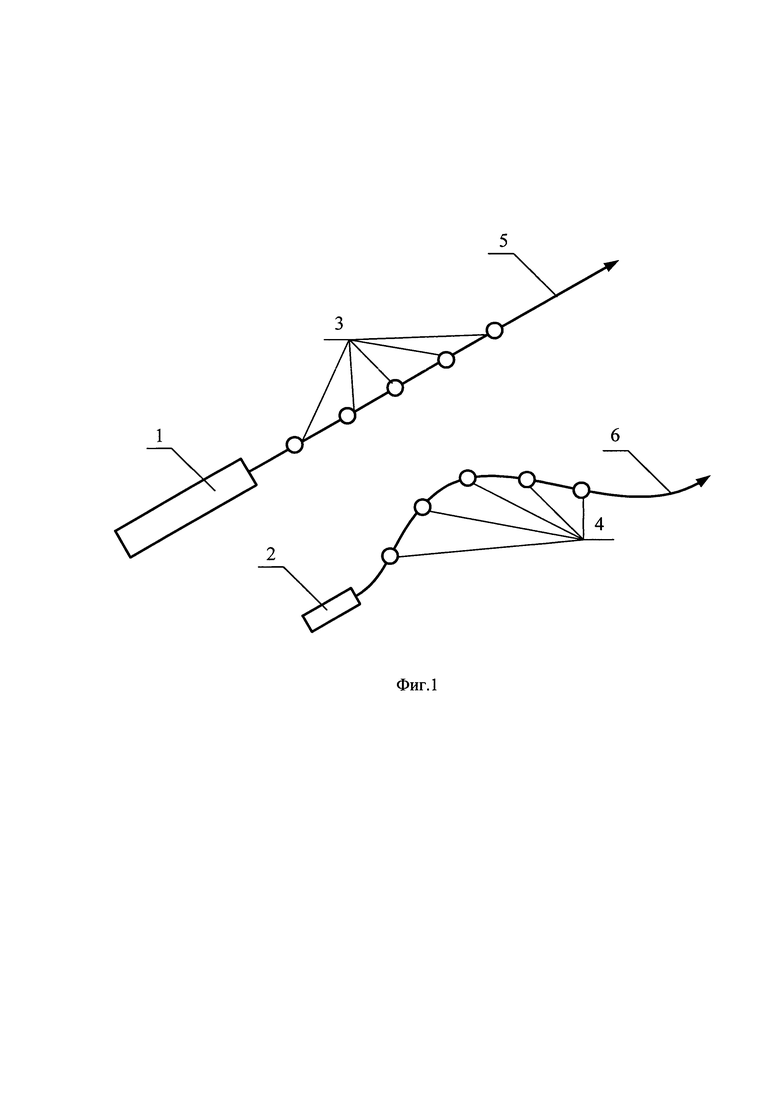
Этапы решения задачи по определению координат и параметров движения наблюдаемого объекта и выполнения заданного маневра относительно наблюдаемого объекта, например, сближения с ним на заданное расстояние или вплотную, показаны на фиг. 1…4.
Цифрами на них обозначены: 1 - обнаруженный и наблюдаемый по источнику магнитного поля ферромагнитный объект, 2 - наблюдающий объект, 3 - координаты наблюдаемого объекта в моменты измерения модульным магнитометром модуля вектора магнитной индукции его магнитного поля, 4 - координаты наблюдающего объекта в моменты измерения им модуля вектора магнитной индукции наблюдаемого объекта, 5 - траектория движения наблюдаемого объекта, 6 - траектория движения наблюдающего объекта, 7 - счетно-решающий прибор, 8 - прибор-диспетчер, 9 - бортовая система управления наблюдающего объекта, 10 - координаты наблюдаемого объекта в момент занятия наблюдающим объектом заданной позиции (11).
На фиг. 1 показаны траектории движения (5) и (6), соответствующие наблюдаемому объекту (1) и наблюдающему за ним объекту (2), оснащенному устройством определения координат и параметров движения наблюдаемого объекта. Точки (3) и (4) соответствуют местам нахождения указанных объектов в моменты замеров модуля вектора магнитной индукции наблюдаемого объекта (1).
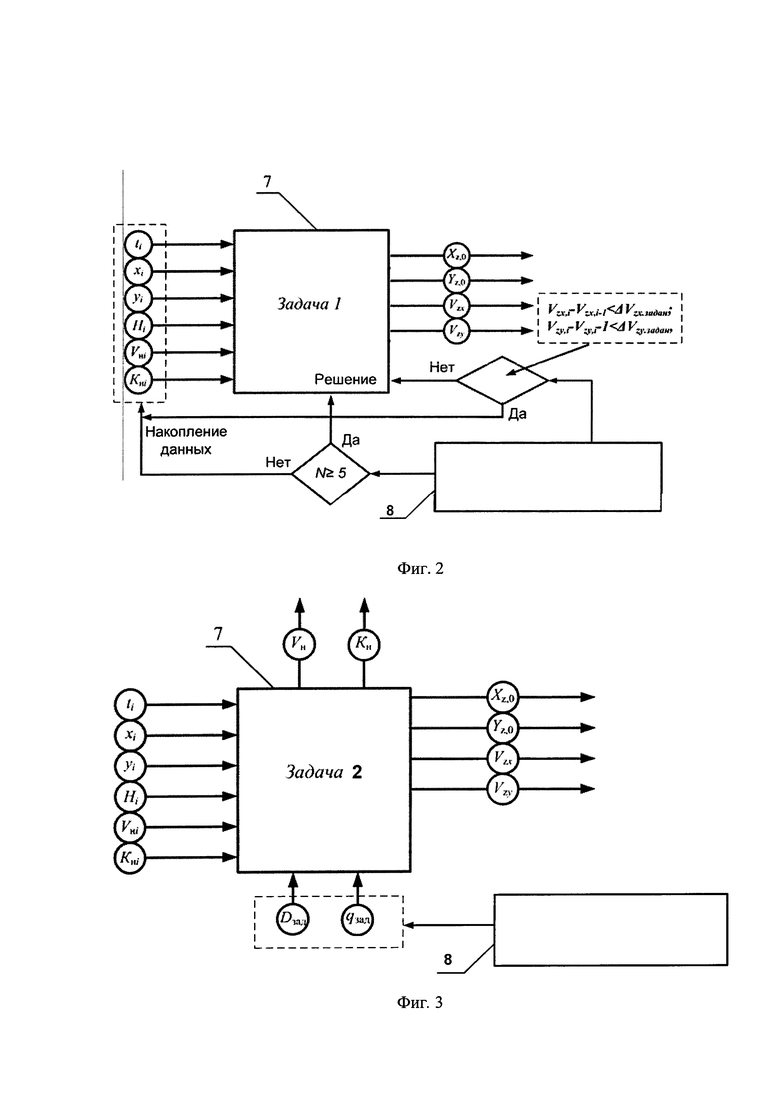
На фиг. 2 показана работа счетно-решающего прибора (7) при решении задачи 1 определения координат и параметров движения наблюдаемого объекта и прибора-диспетчера (8) по управлению процессом решения задачи. Входными величинами в счетно-решающий прибор являются: ti - текущее время, xi и yi - текущие значения координат наблюдающего объекта, Hi - текущее значение модуля вектора магнитной индукции наблюдаемого объекта, Vнi - текущие значения скорости наблюдающего объекта, Кнi - текущие значения курса наблюдающего объекта. Выходными величинами являются текущие координаты Xzi и Yzi и параметры движения Vzx и Vzy наблюдаемого объекта. Решение системы уравнений (4) начинается при количестве измерений N≥5. Задача продолжает решаться до момента времени, пока не будут выполнены неравенства

где ΔVz.задан - заданное значение погрешностей параметров движения, определяющее их точность.
На фиг. 3 проиллюстрировано, что после достижения заданной точности определения координат и параметров движения наблюдаемого объекта прибор-диспетчер (8) передает в счетно-решающий прибор (7) значения курсового угла qзад наблюдаемого объекта-цели и дистанции до нее Dзад в заданную позицию относительно наблюдаемого объекта-цели для решения задачи 2 расчета параметров маневрирования Vн и Кн наблюдающего (инспектирующего) объекта в эту позицию.
На фиг. 4 показаны траектории объектов и точки их нахождения (9) и (10) в момент занятия наблюдающим объектом заданной позиции 10 относительно наблюдаемого объекта.
Техническим результатом изобретения является не подверженное помехам устройство, служащее для определения координат и параметров движения обладающего магнитным полем ферромагнитного объекта и предназначенное для оснащения подвижного наблюдающего (инспектирующего) объекта, в частности, для сближения с наблюдаемым объектом в целях инспектирования на заданную дистанцию или вплотную.
Источники информации, использованные при выявлении изобретения:
1. Семевский Р.Б., Аверкиев В.В., Яроцкий В.А. Специальная магнитометрия. - СПб: Наука, 2002. - 228 с.
2. Новиков А.В. Противолодочное ракетное оружие. Теоретические основы. - СПб: ВМИ, 2007. - 438 с.
Устройство для определения координат и параметров движения наблюдаемого ферромагнитного объекта содержит координатор наблюдаемого объекта и счетно-решающий прибор, включающий модульный магнитометр и прибор-диспетчер. Обеспечивается повышение точности определения координат и параметров движения наблюдаемого объекта. 4 ил.
Устройство для определения координат и параметров движения наблюдаемого ферромагнитного объекта, содержащее счетно-решающий прибор, отличающееся тем, что координатор наблюдаемого объекта содержит модульный магнитометр и прибор-диспетчер, при этом:
модульный магнитометр выполнен с возможностью замера модуля вектора магнитной индукции искомого ферромагнитного объекта,
прибор-диспетчер выполнен с возможностью:
- выдачи управляющего сигнала в бортовую систему управления наблюдающего объекта для необходимых изменений его курса и/или скорости;
- определения числа необходимых измерений модуля вектора магнитной индукции ферромагнитного объекта магнитометром;
- инициирования выдачи данных в счетно-решающий прибор;
счетно-решающий прибор выполнен с возможностью определения координат и параметров движения наблюдаемого объекта, а также вычисления траектории движения наблюдающего объекта для выполнения заданного маневра относительно наблюдаемого объекта.
| СПОСОБ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2000 |
|
RU2197013C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2015 |
|
RU2615050C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ МАГНИТНОГО ПОЛЯ | 2019 |
|
RU2713456C1 |
| СПОСОБ КООРДИНАЦИИ СЕТЕВОГО ОБМЕНА ДАННЫМИ | 2014 |
|
RU2610418C2 |
| Соединение звеньев черпаковой цепи | 1986 |
|
SU1326708A1 |

