Предлагаемое изобретение относится к сфере авиационной техники, в частности, к конструкциям летательных аппаратов, принцип действия которых основан на осуществлении периодических маховых движениях крыльев для полета в воздушной среде. Летательные аппараты такого типа также называют махолетами или орнитоптерами. Предлагаемое техническое решение может быть использовано в качестве управляемого дрона (БПЛА, беспилотного летательного аппарата) для наблюдения за поверхностью земли, доставки грузов, транспортировки и иных видов операций, а также для пилотируемых полетов. Аппарат может найти применение в сфере топографии, геологии, грузоперевозок, сельском хозяйстве, развлечений и транспортирования. Современные средства управления и материалы позволяют создать летательный аппарат, основанный на предложенном принципе.
Уровень техники содержит сведения об устройствах, использующих идентичный принцип полета. В частности, известно техническое решение по патенту Японии на изобретение № JP 415697 «Motion conversion mechanism (Устройство преобразования энергии)» (з-ль Yoshiyuki Oguri, заявка No.: JP 1963070580 от 1963-01-01, публ. 1966-03-29, МПК В64С 31/00). Согласно фигурам чертежей, техническое решение представляет собой привод крыла орнитоптера, состоящий из двух кривошипных механизмов, выполненных в виде коленчатых валов с наклонной шейкой, снабженных качающейся шайбой. Шайба соединена с элементом крыла устройства. Привод выполнен с возможностью совершения маховых движений.
Недостатком указанного технического решения является невозможность регулировать траекторию, которую описывает крыло при осуществлении маховых движений, а оси валов не являются параллельными, что затрудняет приведение крыльев в одну плоскость в процессе осуществления планирования.
Известно техническое решение по авторскому свидетельству СССР на изобретение №487808 «Привод крыла орнитоптера» (заявители: Селиванов Н.П, Селиванов В.П., з. №1915224, 04.05.1973, публ. 15.10.1975, МПК В64С 33/02). Согласно описанию технического решения, привод состоит из силового элемента машущего крыла, соединенного с коленчатым валом при помощи кардана. На силовом элементе установлена с возможностью перемещения вдоль него сферическая опора. Коленчатый вал при помощи муфты соединен с двигателем через редуктор и включает в себя цилиндрическую часть и шейку колена, соединенную с этой цилиндрической частью при помощи двух щек. Колено выполнено в виде спрямленного участка цилиндрической спирали.
Недостатком указанного технического решения является необоснованное усложнение механизма привода, включающего дополнительные связующие детали между крылом и приводом. Кроме того, в устройстве отсутствует эффективная реализация изменения угла атаки при маховых движениях, что не позволяет обеспечить должную эффективность полета летательного аппарата.
Известно техническое решение по патенту Российской Федерации на полезную модель №120398 «Махолет» (з-ль Двоеглазов В.Н., з. №2012112882/11, 03.04.2012, публ. 20.09.2012, МПК В64С 33/02). Согласно описанию технического решения, изобретение относится летательным аппаратам, приводимым в движение махами крыльев. Махолет содержит полужесткий каркас, два машущих крыла, хвостовой стабилизатор, приводы машущих крыльев и двигатель, при этом каждое машущее крыло содержит подвижный осевой ограничитель, основной и вспомогательный лонжероны, цевье, нервюры, стрингеры и маятниковую опору и выполнено с возможностью изменения его жесткости и геометрии. Крылья соединены друг с другом с помощью эластичной мембраны, а приводы машущих крыльев выполнены в виде двух кривошипно-шатунных механизмов махового движения крыльев, обеспечивающих синхронное движение крыльев. К недостаткам указанного технического решения можно отнести применение тросов для создания напряжения лонжеронов, что создает дополнительное сопротивление в воздушной среде в режиме полета. Кроме того, полезной моделью не предусмотрена возможность сохранения вогнутости крыла на всех этапах маха, а изменение угла атаки происходит вследствие сопротивления воздушного потока, а не посредством привода, что снижает общую эффективность устройства.
Таким образом, имеющийся уровень техники не содержит сведений о технических решениях, решающих ряд технических проблем. Так, технической проблемой, решаемой предлагаемым изобретением является создание летательного аппарата с машущими крыльями, содержащего привод и крыло, позволяющих повысить аэродинамические качества аппарата, прочность силовых элементов к восприятию нагрузок на изгиб и кручение, эффективность полета устройства за счет выбора оптимальной траектории движения крыла, что, в совокупности, позволяет значительно улучшить управляемость, скорость и подъемную силу, создаваемую узлами аппарата, приводя к улучшению ключевых качеств устройства.
Техническая проблема решается следующим образом. Настоящим описанием, предложен летательный аппарат с машущими крыльями. Согласно изобретению, устройство содержит корпус, крылья и привод. Привод состоит из двигателя, трансмиссии и кривошипных механизмов, выполненных в виде коленчатого вала с наклонной шейкой, снабженного, по существу, качающейся шайбой, выполненной с возможностью совершения колебательных движений относительно точки, расположенной вблизи оси вращения коленчатого вала кривошипного механизма. Устройство дополнительно характеризуется тем, что качающаяся шайба жестко соединена, по меньшей мере, с одним стержневым элементом силового набора крыла и снабжена пальцем. Палец выполнен с возможностью скольжения по установленной в плоскости кривошипного механизма, по существу, дуговой направляющей с центром, расположенным в окрестности точки, относительно которой совершаются колебательные движения качающейся шайбы. Каждое крыло аппарата выполнено в виде консоли купольной формы, образованной профилированным полотном крыла и силовым набором крыла, состоящим из множества радиально расположенных стержневых элементов, включающих, лонжерон крыла, по меньшей мере один упруго деформированный стержневой элемент крыла, выполненный, по существу, изоморфным профилированному полотну крыла, и нервюру крыла, лежащую в плоскости лонжерона.
Общими с аналогом признаками являются наличие корпуса аппарата, крыльев и силового привода, состоящего из двигателя, трансмиссии и кривошипных механизмов, выполненных в виде коленчатого вала с наклонной шейкой, снабженного, по существу, качающейся шайбой, выполненной с возможностью совершения колебательных движений относительно точки, расположенной вблизи оси вращения коленчатого вала кривошипного механизма.
В общем случае техническое решение отличается от аналога тем, что качающаяся шайба жестко соединена с, по меньшей мере, одним стержневым элементом силового набора крыла и снабжена пальцем. Палец выполнен с возможностью скольжения по установленной в плоскости кривошипного механизма, по существу, дуговой направляющей с центром, расположенным в окрестности точки, относительно которой совершаются колебательные движения качающейся шайбы. Каждое крыло аппарата выполнено в виде консоли купольной формы, образованной профилированным полотном крыла и силовым набором крыла, состоящим из множества радиально расположенных стержневых элементов, включающих, лонжерон крыла, по меньшей мере один упруго деформированный стержневой элемент крыла, выполненный, по существу, изоморфным профилированному полотну крыла, и нервюру крыла, лежащую в одной плоскости с лонжероном крыла.
В первом частном случае выполнения корневая нервюра крыла ориентирована по отношению к лонжерону крыла, по существу, под прямым или острым углом.
В первом уточнении указанного частного случая, аппарат дополнительно характеризуется тем, что крыло снабжено нижней обшивкой, выполненную таким образом, что профиль крыла приобретает плоско-выпуклую форму.
Во втором уточнении первого частного случая, аппарат дополнительно характеризуется наличием диагонального стержневого элемента силового набора крыла, торцы которого соединены с первым элементом силового набора и корневой нервюрой.
В развитие указанного уточнения первого частного случая, устройство дополнительно характеризуется тем, что диагональный стрежневой элемент силового набора крыла выполнен упруго деформированным.
В ином частном случае выполнения устройство дополнительно характеризуется тем, что количество кривошипных механизмов соответствует количеству крыльев летательного аппарата, таким образом, что стержневой элемент каждого крыла соединен с качающейся шайбой соответствующего кривошипного механизма.
В следующем частном случае выполнения, аппарат характеризуется тем, что дуговая направляющая выполнена с возможностью наклона относительно оси вращения кривошипного механизма
Целесообразно реализация аппарата таким образом, что корневые части вала кривошипного механизма установлены на подшипниках, а ось вращения кривошипного механизма, по существу, перпендикулярна продольной оси летательного аппарата.
В седьмом частном случае выполнения, аппарат дополнительно характеризуется тем, что элементы силового набора крыла полностью или частично помещены в рукава, присоединенные к профилированному полотну крыла.
В восьмом частном случае выполнения раскрыт вариант устройства, дополнительно характеризующийся тем, что дистальный конец упруго деформированного стержневого элемента силового набора крыла зафиксирован относительно консоли крыла таким образом, что точка фиксации дистального конца упруго деформированного стержневого элемента силового набора крыла находится на расстоянии от проксимального конца меньшем, чем собственная длина стержневого элемента силового набора крыла.
В уточнении восьмого частного случая выполнения, аппарат дополнительно характеризуется тем, что фиксация дистального конца стержневого элемента силового набора крыла выполнена посредством наконечника.
В развитии уточнения восьмого частного случая выполнения устройства, аппарат дополнительно характеризуется тем, что наконечник выполнен с возможностью регулирования степени деформации упруго деформированного стержневого элемента.
В ином частном случае выполнения, устройство дополнительно характеризуется тем, что дистальный конец пальца, которым снабжена качающаяся шайба, содержит шариковую головку или подшипник.
Целесообразно выполнение, по меньшей мере, одного из упруго деформированных стержневых элементов силового набора крыла составным.
Летательный аппарат в общем случае реализации состоит из корпуса, преимущественно, аэродинамической формы, в котором смонтирован привод машущих крыльев устройства. Узлы приводного механизма включают непосредственно двигатель, обеспечивающий передачу момента па кривошипные механизмы посредством трансмиссии. Одним из вариантов является использование электрического двигателя, приводящего в движение зубчатое колесо, закрепленное на его валу, передаточный механизм, состоящий из входящих между собой в зацепление шестерен, обеспечивающих вращение установленного на подшипниках кривошипного механизма. Конструкция отдельного кривошипного механизма представляет собой коленчатый вал, содержащий коренные шейки, наклонные щеки и наклонную шейку, на которой закреплена качающаяся шайба. При вращении коленчатого вала, коренные шейки совершают вращательное движение вдоль общей оси. Качающаяся шайба, в таком случае, совершает периодические колебательные движения относительно точки, лежащей на оси вращения коренных шеек коленчатого вала. Указанное колебательное движение осуществляется, в том числе, за счет сохранения подвижности качающейся шайбы относительно наклонной шейки коленчатого вала, таким образом, что двигаясь по заданной вращением коленчатого вала траектории, наклонная шейка за счет отсутствия жесткого соединения с качающейся шайбой, не обеспечивает последней передачу вращательного момента, а изменение положения качающейся шайбы обеспечивается исключительно изменением положения шейки относительно основной оси вращения коленчатого вала.
Механизм качающейся шайбы раскрыт, в том числе, в т. 2 «Механизмы в современной технике», Артоболевский И.И. М.: Наука, 1979. По существу, качающейся шайбой называют тело, закрепленное (или связанное) с наклонной шейкой коленчатого вала и совершающее периодические колебательные движения. Форма качающейся шайбы не должна отражать, собственно, шайбу. В данном случае, первичным является функция, которую несет указанный узел.
Соединение качающейся шайбы со стержневым элементом силового набора крыла осуществлено либо непосредственно, либо через соответствующий соединительный элемент. В общем случае, один из стержневых элементов, например, лонжерон, является продолжением качающейся шайбы и также совершает периодические колебательные движения относительно точки, лежащей на оси вращения коленчатого вала.
Противоположный конец качающейся шайбы снабжен пальцем, имеющим, по существу, форму стержня. Указанный элемент выполнен с возможностью скольжения по дуговой направляющей, соединенной с корпусом и установленной в плоскости кривошипного механизма. Кривизна дуги направляющей выбрана таким образом, что движения пальца соответствуют положению направляющей. Возможность наклона направляющей позволяет менять траекторию скольжения пальца, и, соответственно, траекторию, описываемую крылом аппарата при совершении маховых движений. При установке направляющей параллельно (под параллельным размещением, в данном случае, понимается параллельность хорды дуги касательной по отношению к оси вращения кривошипного механизма), траектория, описываемая крылом устройства, будет представлять собой эллипс. Иным образом будет выглядеть угол траектории при задании некоторого угла дуговой направляющей. Угол задается наклоном направляющей относительно поперечной оси аппарата. При изменении угла наклона, эллиптическая траектория, по которой следует крыло аппарата, будет наклоняться относительно поперечной оси аппарата, соответственно заданному углу направляющей. Таким образом, при изменении угла наклона направляющей, и, следовательно, траектории движения крыла, возникает возможность регулировать соотношение толкающей и подъемных сил при махах крыльев.
Консоль крыла аппарата состоит из следующих узлов: силового набора крыла, выполняющего функцию каркаса, и профилированного полотна, поверхность которого непосредственно участвует в создании подъемной силы в процессе полета аппарата. Силовой набор крыла образован радиально расположенными стрежневыми элементами, поддерживающими полотно крыла. Лонжерон функционально представляет собой переднюю кромку крыла.
По принципу восприятия нагрузки при осуществлении маховых движений, упруго деформированные стержневые элементы близки к балочным лонжеронам. Вместе с тем, в отличие от лонжеронов, являющихся продольными силовыми элементами крыла, упруго деформированные стержневые элементы настоящего изобретения являются, по модели размещения, продольно-поперечными силовыми элементами, т.е. совмещают в себе функцию лонжеронов и нервюр. Единственным стержневым элементом крыла, отвечающим определению лонжерона, элемент, образующий переднюю кромку крыла. Далее по тексту описания, применительно к первому стержневом элементу будет применяться термин «лонжерон».
Профилированная форма полотна крыла обусловлена снижением напряжения полотна в местах контакта с силовым набором крыла. Применение плоского полотна крыла может привести к разрушению поверхности полотна вследствие растяжения. Величина растяжения непрофилированного полотна будет отличаться по его поверхности. Предварительно сформированная, с учетом воспринимаемых нагрузок, вогнутая поверхность полотна, позволяет снизить напряжение в ключевых точках, а также обеспечивает вогнутость, необходимую для упругой деформации элементов силового набора крыла.
В общем случае, под купольной формой консоли крыла понимается такая форма крыла, при которой множество точек, лежащих на периметре крыла находятся ниже множества точек, составляющих остальную поверхность крыла, причем крыло приобретает, по существу, дугообразную форму как вдоль профиля, так и вдоль размаха.
Выполнение ряда стержневых элементов упруго деформированными позволяет повысить прочность крыла к восприятию изгибающих сил при совершении маховых движений. Так, при осуществлении махового движения сверху вниз, упруго деформированные стержневые элементы часть изгибающих нагрузок переводят на силы сжатия. При совершении обратного движения, стержневые элементы, также испытывающие сопротивление воздуха, деформируются сильнее, что приводит к снижению сопротивления маховому движению, сокращая результирующую действия сил, направленную, по существу, к земле.
Упругая деформация стержневого элемента и его взаимодействие с внутренней поверхностью полотна крыла осуществлено таким образом, что форма изгиба, по существу, параболическая, достигается, в том числе, упором во внутреннюю поверхность профилированного полотна крыла. Таким образом, профилированная поверхность крыла приводит к соответствующему изгибу стержневого элемента, подверженного упругой деформации. В данном случае, можно говорить об изоморфности стержневого элемента и поверхности купола консоли крыла. Указанный признак непосредственно влияет на технический результат, обеспечивая согласованную работу полотна крыла с силовым каркасом, снижая аэродинамическое сопротивление при движении по горизонтали вследствие плотного прилегания элементов силового каркаса к внутренней поверхности полотна крыла.
Радиальное расположение стержневых элементов силового набора позволяет получить равномерное натяжение полотна и обеспечить единственный узел соединения крыла с приводом, что способствует упрощению конструкции устройства, а, следовательно, и повышению эффективности.
Корневая нервюра позволяет создать часть периметра крыла, ограниченную двумя силовыми элементами: лонжероном и корневой нервюрой. Отличие корневой нервюры от упруго деформированных стержневых элементов заключается в отсутствии, собственно, упругой деформации. Указанный элемент лежит в той же плоскости, что и лонжерон, образующий переднюю кромку крыла.
Дополнительное введение в силовой набор крыла диагонального элемента, соединяющего первый стержневой элемент силового набора крыла и корневую нервюру, обеспечивает дополнительную поддержку упруго деформированным стержневым элементам, частично воспринимая изгибающий момент, им сообщаемый. Диагональный силовой элемент также может быть выполнен упруго деформированным, в соответствии с профилем того участка полотна крыла, через который он проходит. Деформация обеспечивается тем, что расстояние между точками крепления диагонального силового элемента меньше, чем его длина в недеформированном состоянии.
Каждое крыло аппарата соединено с соответствующим ему кривошипным механизмом. Привод кривошипного механизма выполнен с возможностью разнонаправленного вращения кривошипных механизмов, приводящих в движение крылья, расположенные по противоположным бортам аппарата.
Ориентация оси кривошипного механизма, по существу, перпендикулярно продольной оси летательного аппарата, позволяет крыльям, при нейтральном положении дуговой направляющей, описывать вертикально ориентированный эллипс. Дальнейшее изменение траектории движения крыла задается положением указанной направляющей. Использование наклонного положения кривошипных механизмов, как раскрыто в патенте JP 415697, хотя и способствует некоторому упрощению конструкции устройства, в то же время не позволяет регулировать траекторию, которую описывает крыло при осуществлении маховых движений.
Соединение стержневых элементов силового набора крыла посредством рукавов, внутрь которых пропущены стержневые элементы, позволяет создать дополнительные точки крепления стержней к полотну, привести профили полотна и стержней к единому виду и обеспечить плотное прилегание узлов консоли крыла. Стержневые элементы могут быть лишь частично помещены в указанные рукава, приводя, тем самым, к экономии материала. Участки стержневых элементов, которые необходимо поместить в рукава, могут быть выбраны исходя из величины натяжения, которому подвергается полотно крыла при совмещении со стержневым элементом силового набора. Вместе с тем, стержневой элемент может быть полностью помещен в рукав соответствующей длины.
Упругая деформация стержневого элемента, в соответствие с одной из частных реализаций, может быть достигнута посредством фиксации дистального конца стержневого элемента относительно поверхности крыла. Такой принцип позволяет, с одной стороны, обеспечить достаточное натяжение самого полотна консоли крыла, с другой - упростить конструкцию, получив в результате упруго деформированный стержень без применения дополнительных механизмов для создания напряжения, значительно ухудшающих аэродинамические показатели устройства. Изменение расстояния фиксации дистального конца стержня привести к изменению степени изгиба стержневого элемента, и натяжения полотна консоли крыла.
Для фиксации дистального конца стержневого элемента может быть предусмотрено применение наконечника, фиксирующего дистальный конец стержня и соединенного, соответственно, с полотном консоли крыла. В общем случае, неподвижность наконечника относительно полотна крыла позволяет создать необходимую упругую деформацию стержневого элемента.
В соответствии с изобретением, предусмотрена регулировка положения наконечника относительно полотна консоли крыла. Таким образом, осуществляется изменение степени изгиба упруго деформированных стержневых элементов силового набора, как описано выше.
Снабжение дистального конца пальца шариковой головкой или аналогичным по функциональному назначению подшипником позволяет шарнирно соединить качающеюся шайбу с дуговой направляющей, предотвратив выход дистального конца пальца из канала направляющей при осуществлении маховых движений.
Изобретением предусмотрено дополнительное снабжение консоли крыла нижней обшивкой, таким образом, что натяжение указанной обшивки происходит посредством фиксации, по меньшей мере, в указанных точках: вдоль линии первого стержневого элемента, вдоль корневой нервюры и на концах упруго деформированных стержневых элементов силового набора крыла. Нижняя обшивка выполнена, по существу, плоской.
Выполнение упруго деформированного стержневого элемента составным предполагается осуществлять в местах возникновения высокого изгибающего момента, могущего повлечь перелом аналогичного цельного стержня, а также позволяет ускорить процесс сборки-разборки крыла. Натяжение полотна, в таком случае, обеспечивается за счет соседних стержневых элементов. Кроме того, конструкция составного стержневого элемента за счет перелома в месте соединения частей стержня позволяет снизить сопротивление воздушного потока при махах вверх.
Применение предварительно сформированной купольной (вогнуто-выпуклой) поверхности крыла позволяет, как уже было отмечено выше, создать профилированное полотно крыла, в том числе, для снижения нагрузок при интеграции с силовым набором.
Предлагаемое изобретение поясняется следующими фигурами:
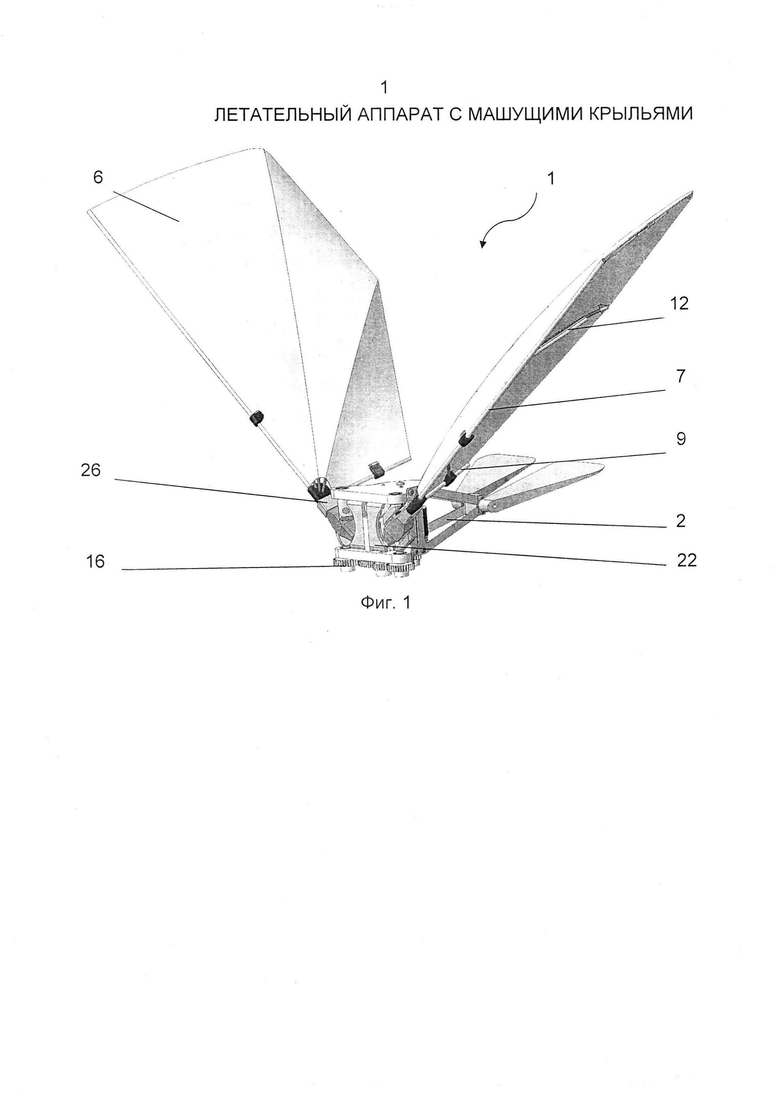
Фиг. 1 - Летательный аппарат, главный вид;
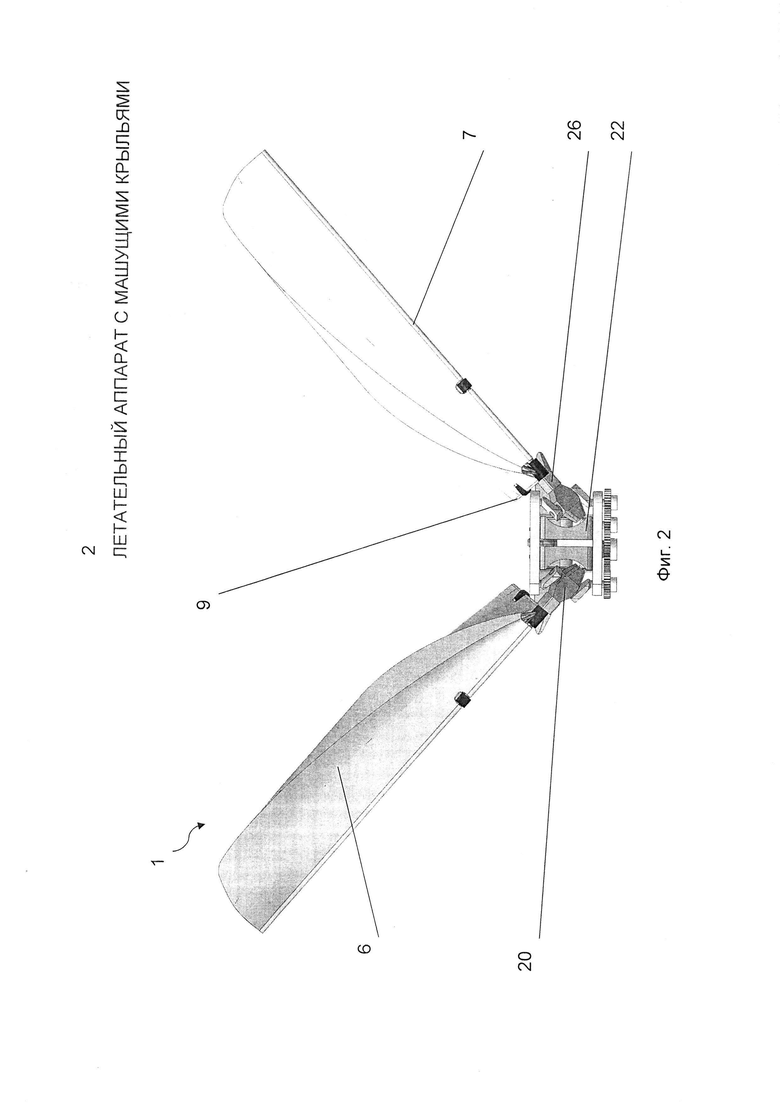
Фиг. 2 - Летательный аппарат, вид спереди;
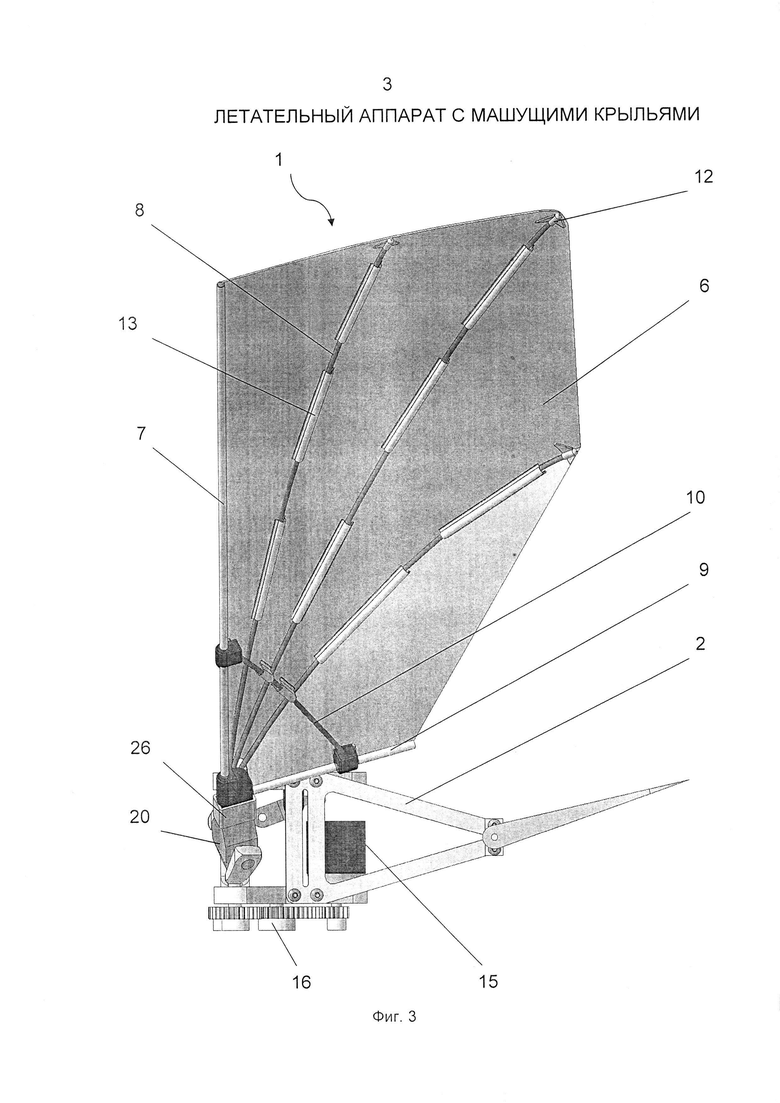
Фиг. 3 - Летательный аппарат, вид сбоку;
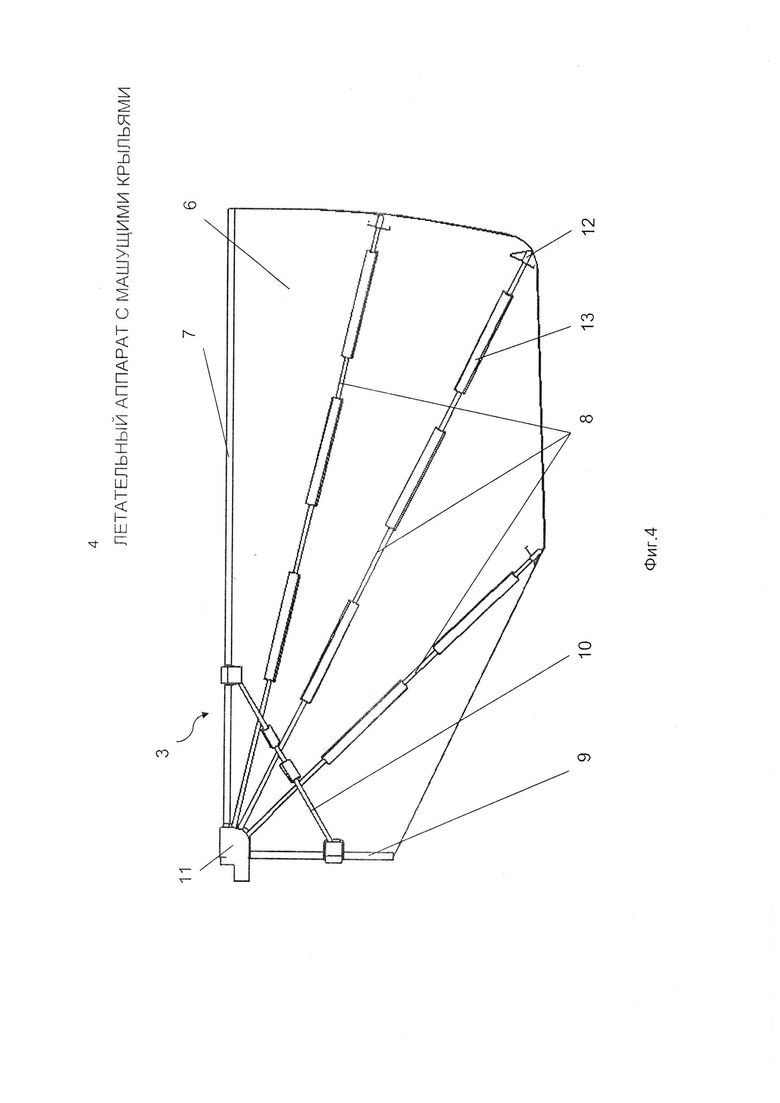
Фиг. 4 - крыло летательного аппарата, вид снизу;
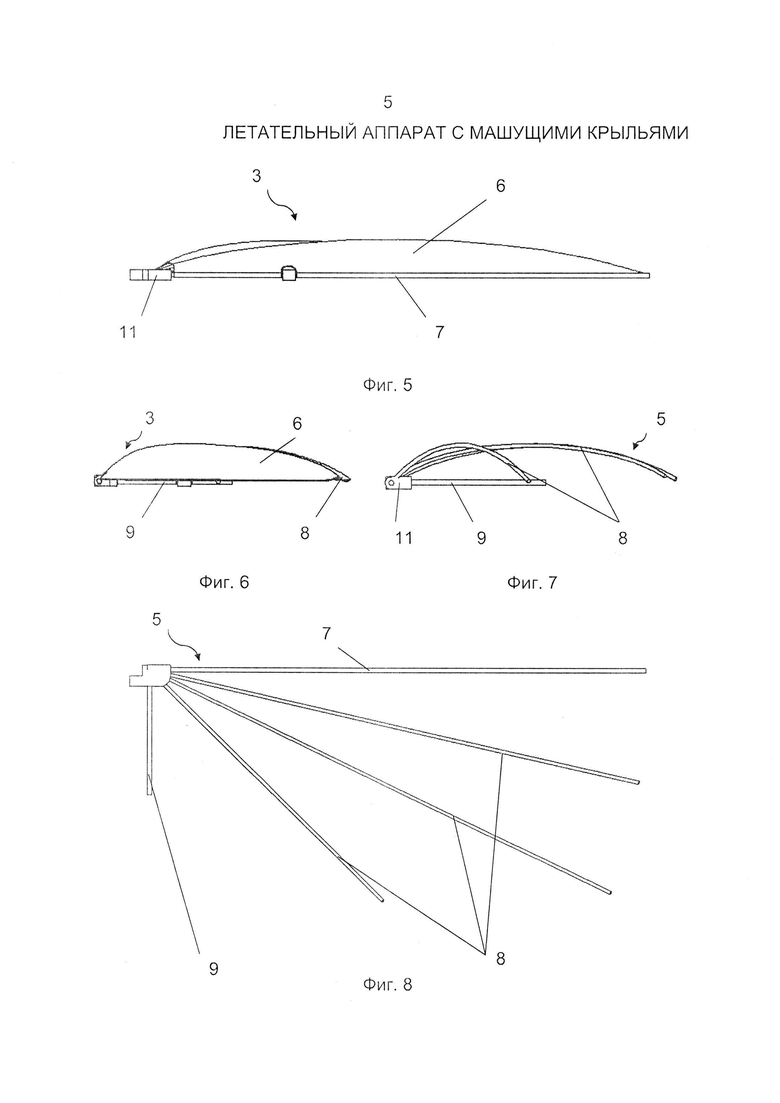
Фиг. 5 - крыло летательного аппарата, вид спереди;
Фиг. 6 - крыло летательного аппарата, вид сбоку;
Фиг. 7 - силовой набор консоли крыла летательного аппарата, вид сбоку;
Фиг. 8 - силовой набор консоли крыла летательного аппарата;
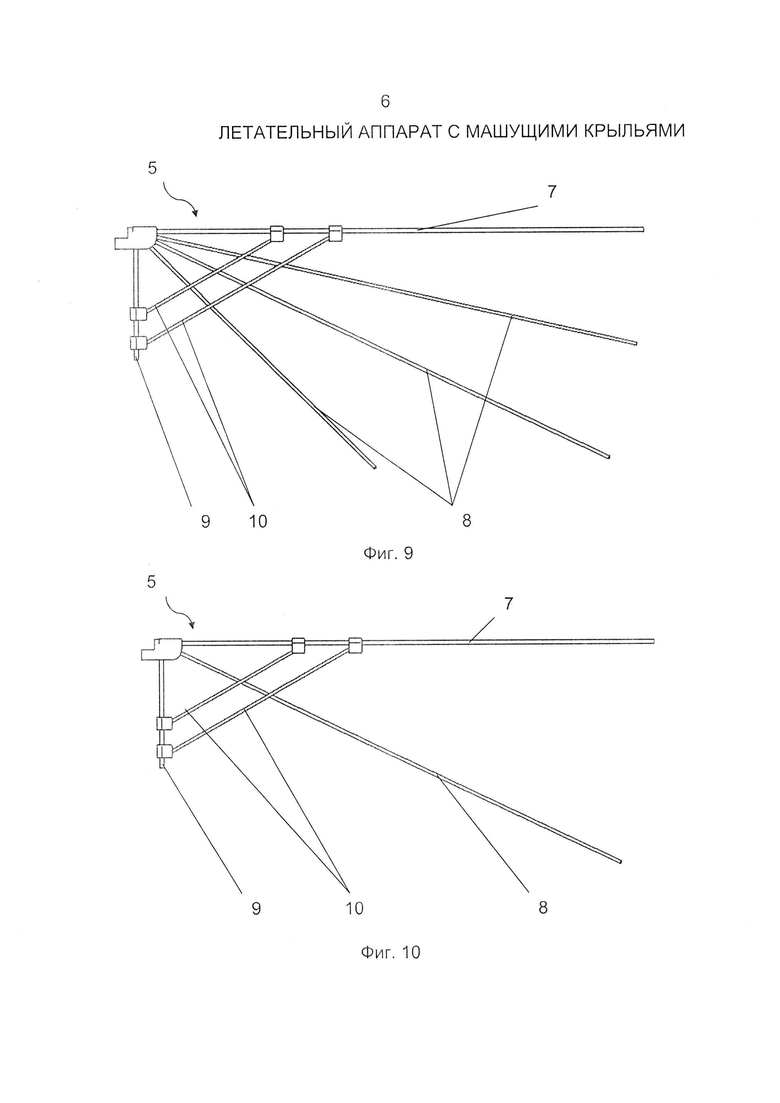
Фиг. 9 - силовой набор с диагональными стержневыми элементами;
Фиг. 10 - силовой набор с одним упруго деформированным стержневым элементом
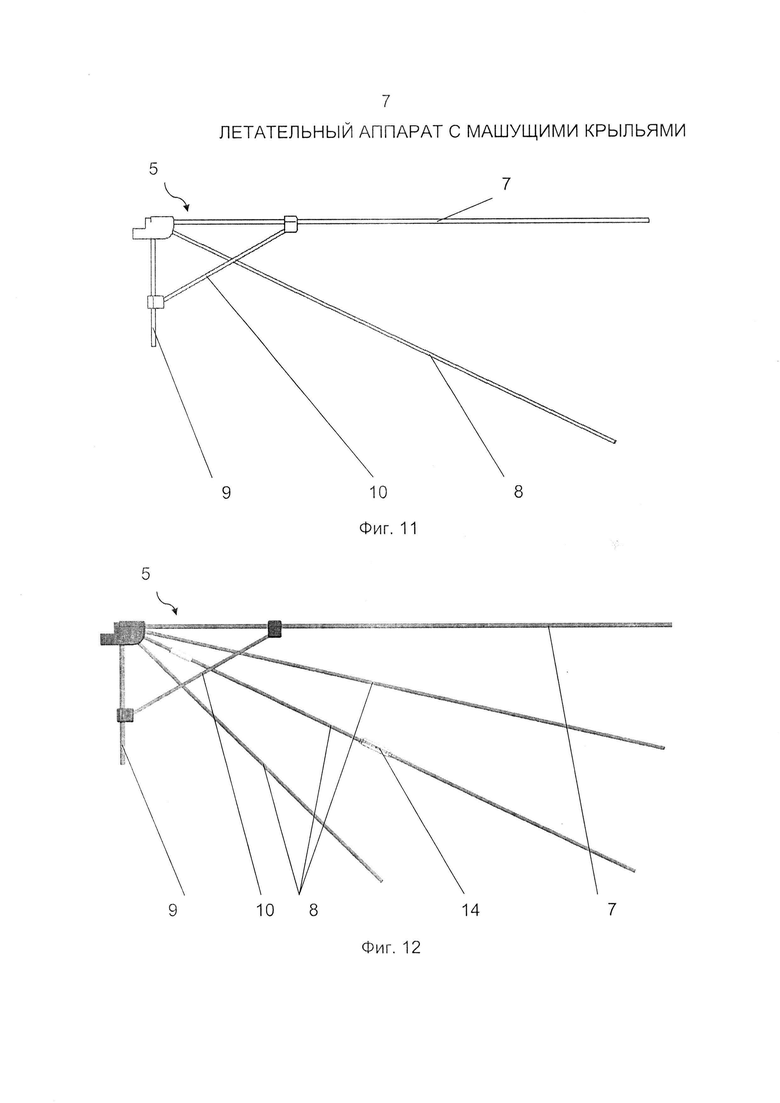
Фиг. 11 - силовой набор с одним упруго деформированным стержневым элементом
Фиг. 12 - силовой набор с составным стержневым элементом;
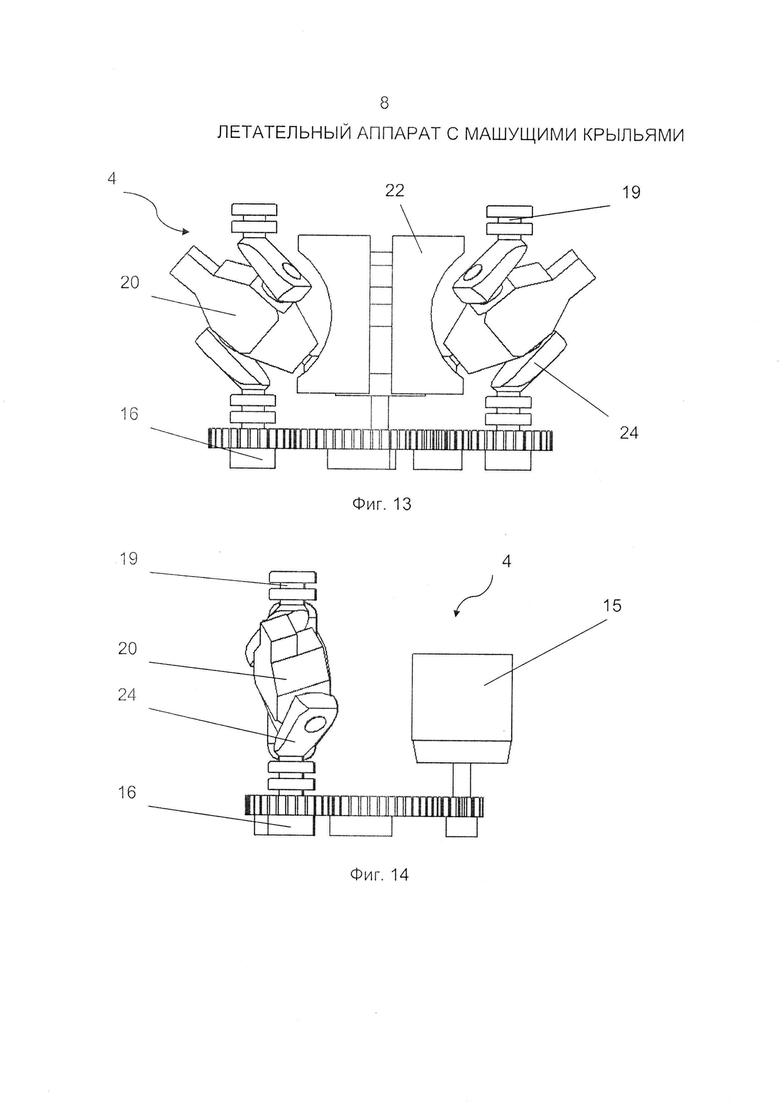
Фиг. 13 - привод летательного аппарата, вид спереди;
Фиг. 14 - привод летательного аппарата, вид сбоку;
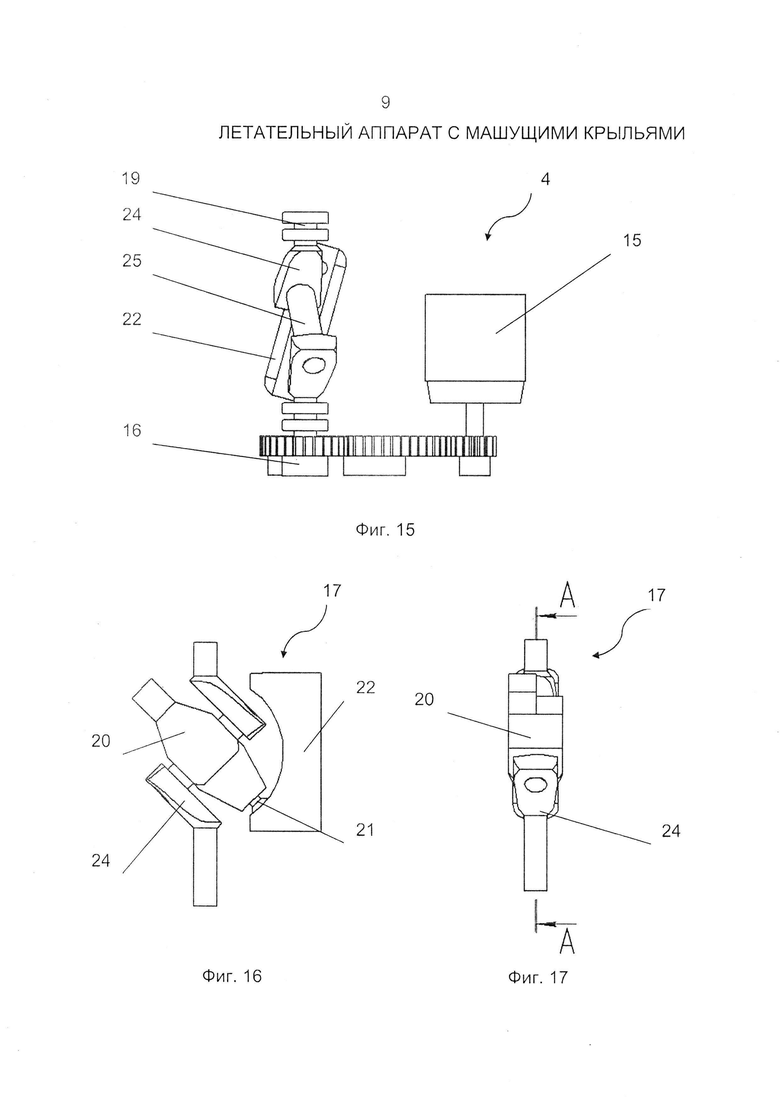
Фиг. 15 - привод летательного аппарата, вид сбоку с наклоненной направляющей;
Фиг. 16 - кривошипный механизм летательного аппарата, вид спереди;
Фиг. 17 - кривошипный механизм летательного аппарата, вид сбоку;
Фиг. 18 - кривошипный механизм летательного аппарата, разрез плоскостью А-А;
Фиг. 19 - составной коленчатый вал кривошипного механизма, разрез;
Фиг. 20 - вариант трансмиссии привода;
Фиг. 21 - вариант крыла с нижней обшивкой.
На фигурах обозначены следующие позиции:
1 - летательный аппарат в сборе;
2 - корпус летательного аппарата;
3 - консоль крыла (крыло);
4 - привод;
5 - силовой набор крыла;
6 - профилированное полотно крыла;
7 - лонжерон;
8 - упруго деформированный стержневой элемент;
9 - корневая нервюра;
10 - диагональный стержневой элемент;
11 - обвязка;
12 - наконечник;
13 - рукав;
14 - втулка;
15 - двигатель;
16 - трансмиссия;
17 - кривошипный механизм;
18 - коленчатый вал;
19 - подшипник;
20 - качающаяся шайба;
21 - палец;
22 - дуговая направляющая;
23 - коренная шейка коленчатого вала;
24 - щека коленчатого вала;
25 - наклонная шейка коленчатого вала;
26 - соединитель качающейся шайбы с крылом;
27 - нижняя обшивка.
Для понимания принципов работы и особенностей различных реализаций изобретения, ниже приведено описание фигур технического решения. Хотя в тексте описания подробно объясняются предпочтительные варианты реализации технического решения, необходимо понимать, что возможны и иные варианты реализации изобретения. Соответственно, нет необходимости в ограничении объема правовой охраны технического решения исключительно представленными реализациями и перечнями узлов и компонентов. Изобретение может быть реализовано и иными способами. Вместе с тем, при описании предпочтительных вариантов технического решения, для ясности понимания основных принципов изобретения специалистом, необходимо уточнить термины, применяемые в описании.
Необходимо отметить, что используемые в единственном числе в описании и формуле узлы и детали устройства, также представляют собой и множественные формы, если прямо не сказано обратное. Например, указание на составной элемент устройства также означает указание на совокупность (множество) таких элементов.
Также, при описании предпочтительных вариантов выполнения, для обеспечения ясности понимания, используются специальные термины. Предполагается, что термин используется в самом широком смысле, в каком он может быть истолкован специалистами в данной области техники и включает все технические эквиваленты, используемые тем же образом и с той же целью. Так, в частности, термин «корпус» означает основную часть механизма, в который (или на который) монтируются другие узлы устройства. В контексте данного изобретения, корпус, как основной элемент летательного аппарата, помимо подробно описываемого привода, может содержать и иные монтируемые узлы и элементы, такие как, например, хвостовое оперение, блоки связи и управления, некоторые исполнительные механизмы, питание (топливо) двигателя, кабину пилота и иные необходимые элементы летательного аппарата, типично находящие применение в его конструкции. Термин «трансмиссия» включает совокупность механизмов, для передачи вращения от двигателя к кривошипному механизму. Содержание и некоторые примеры конкретного выполнения раскрыты ниже. Вместе с тем, возможна и иная реализация механизма трансмиссии. Таким образом, важным аспектом является не сама реализация трансмиссии, а ее функциональное назначение, заключающееся в передаче вращательного момента от двигателя исполнительному органу. Термин «кривошипный механизм» характеризует принцип действия исполнительного органа, состав кривошипного механизма кратко приведен в формуле и описан в примерах выполнения. В случае настоящего изобретения, термин «коленчатый вал» применяется для описания механизма, содержащего коренные шейки, щеки, ориентированные под некоторым острым углом по отношению к оси вращения коренных шеек и наклонную шейку, с которой подвижно связана качающаяся шайба, под которой, в свою очередь, в настоящем описании понимается элемент, выполняющий свойственное ему функциональное назначение - совершение вследствие вращения коленчатого вала колебательных движений относительно точки, лежащей вблизи оси вращения вала. Использование термина «шайба» не касается, по существу, формы выполнения элемента и не накладывает на нее ограничений. Как и в случае с приведенными выше терминами, первостепенна именно функция детали, выраженная в преобразовании вращательного движения в колебательное. Термин «жесткое соединение», использованный по отношению к связи качающейся шайбы со стержневым элементом силового набора крыла, означает, что отклонение шайбы на определенный угол (при качении) приводит к отклонению, по существу, на равный угол стержневого элемента и/или силового набора крыла. Термин «стержень», примененный по отношению к основному элементу силового набора крыла применяется для описания геометрической формы выполнения указанного элемента. По способу восприятия нагрузок, элемент, с точки зрения статики, более близок к консольной балке, поскольку воспринимает, в основном, изгибающие моменты. Таким образом, в данном случае, указанный термин относится не к функциональному назначению элемента, а является его геометрической характеристикой. Словосочетание «лежащий в плоскости» характеризует взаимное расположение элементов и означает, что оба элемента, связанные словосочетанием лежат, по существу, в одной плоскости. Вместе с тем. не следует воспринимать указанное словосочетание с математической точки зрения, потому как допустимо некоторое отклонение элементов от объединяющей их плоскости.
Слова «состоящий», «содержащий», «включающий» означают, что, по меньшей мере указанный компонент, элемент, часть или шаг способа присутствует в композиции, предмете или способе, но не исключает присутствие иных компонентов, материалов, частей, шагов способа, даже если такой компонент, материал, часть, шаг способа выполняет ту же функцию, что и указанный.
Материалы, из которых изготовлены различные элементы настоящего изобретения, указанные ниже при описании примеров конкретного выполнения устройства, являются типичными, но не обязательными для применения. Указанные в настоящих примерах выполнения материалы, могут быть заменены многочисленными аналогами, выполняющими ту же функцию, что и приведенные в описании примеры материалов.
Обратимся к прилагаемым фигурам. На Фиг. 1-3 изображен летательный аппарат в соответствии с одной из конкретных реализаций настоящего изобретения.
Устройство 1 содержит корпус 2 с прикрепленным к нему хвостовым стабилизатором (без позиции), два машущих крыла 3 и привод 4 машущих крыльев 3. Корпус может иметь продолговатую, удлиненную форму, как показано на Фиг. 1. Тем не менее, корпус может иметь различную форму. Например, корпус 2 может быть такой формы, при которой его длина превышает ширину и наоборот. Корпус 2 также может иметь различную геометрическую форму, например, по существу, форму прямоугольной призмы или цилиндра. Форма корпуса 2 может быть изменена, исходя из задач, на решение которых направлена конкретная реализация аппарата, таких, например, как транспортировка или доставка. Кроме того, может быть предусмотрено снабжение корпуса оборудованием для аэрофотосъемки, что должно предусматривать соответствующую форму выполнения корпуса 2.
В случаях реализации, предусматривающих установку более одной пары крыльев 3, форма корпуса может быть изменена для размещения дополнительных пар крыльев.
Корпус 2 летательного аппарата может быть выполнен из различных материалов, характеристики которых удовлетворяют требованиям, обусловленным функциональным назначением аппарата. В соответствии с некоторыми частными случаями реализации, корпус может быть выполнен, например, из термопластов, таких как полиэтилен, полипропилен, поливинилхлорид; металлов (алюминия, титана, стали и их сплавов), а также, в ряде случаев, из дерева. Приведенный перечень материалов иллюстрирует лишь некоторые частные случаи выполнения летательного аппарата.
Место расположения крыльев 3 устанавливается, преимущественно, с учетом центра тяжести аппарата, таким образом, что линия, проходящая через центр тяжести и перпендикулярная продольной оси аппарата, будет лежать между линиями передней и задней кромки крыла.
Как показано на Фиг. 4-6, крылья 3, образованные, по существу, силовым набором 5 крыла 3 и полотном 6 крыла 3, содержат лонжерон 7, установленный вблизи передней кромки каждого крыла 3. Крылья 3 также содержат один или несколько упруго деформированных стержневых элементов 8. корневую нервюру 9 и могут содержать один или несколько диагональных стержневых элементов 10. Стержневые элементы 8 и корневая нервюра 9 радиально соединены с лонжероном 7 и/или между собой. В большинстве реализаций, лонжерон 7, стержневые элементы 8 и корневая нервюра 9 являются самыми прочными элементами крыла 3 и обеспечивают ему структурную целостность. Указанные элементы являются интегрированным силовым набором 5 крыла 3. В свою очередь, силовой набор 5 крыла 3 может быть дополнен диагональными стержневыми элементами 3 крыла 3, которые могут добавлять дополнительную прочность, сохраняя структурную целостность крыла.
Лонжерон 7, упруго деформированные стержневые элементы 8 и корневая нервюра 9 выполняют функцию каркаса для полотна 6 крыла 3. Полотно выполнено из тонкого материала, расположенного между лонжероном 7, стержневыми элементами 8 и корневой нервюрой 9. В большинстве случаев реализации, полотно 6 крыла 3 создает большую часть подъемной силы крыла. Элементы силового набора 5 крыла могут быть выполнены из жесткого или полужесткого материала, такого, например, как углепластик, стеклопластик, сплавов алюминия и сплавов титана. В некоторых случаях реализации, элементы силового набора крыла 5 могут быть выполнены единой деталью с полотном 6 крыла 3. В таком случае, элементы силового набора 5 должны быть выполнены утолщенными по отношению к полотну 6 крыла 3. На Фиг. 7-11 приведены варианты реализации изобретения. В частности, фиг. 7, 8 содержат изображение силового набора 5, летательного аппарата 1, состоящего из лонжерона 7, соединенных с ним через обвязку 11 нескольких упруго деформированных стержневых элементов 8 и корневой нервюры 9, расположенной в одной плоскости с лонжероном 7. Угол между лонжероном 7 и нервюрой 9 составляет около 90°. Следует отметить, что силовой набор 5 представлен на фигурах 7-12 в том виде, при котором стержневые элементы 8 находятся в упруго деформированном состоянии, т.е. дистальные концы стержней помещены в наконечники 13, для того, чтобы добиться указанной деформации. На Фиг. 9 показана схема силового набора 5, дополненная двумя диагональными стержневыми элементами 10, концы которых соединены с лонжероном 7 и нервюрой 9. Далее, на фиг. 10 приведен иной вариант реализации силового набора, содержащего один упруго деформированный стержневой элемент 8 и два диагональных стержневых элемента 10. Приведенные фигуры иллюстрируют варианты реализации изобретения, предлагая различные возможности компоновки элементов силового набора, не ограничивая возможности выполнения изобретения. Выбор конкретного варианта компоновки зависит, прежде всего, от функционального назначения аппарата, веса, и применяемых материалов. Ключевыми аспектами изобретения, относящимся к конструкции силового набора 5 крыла 3 летательного аппарата 1, являются наличие лонжерона 7, нервюры 9 и, по меньшей мере, одного упруго деформированного стержневого элемента 8. Количество упруго деформированных стержневых элементов 8, а также наличие диагональных стержневых элементов 10 может варьироваться.
В общем случае реализации, предусмотрена вогнуто-выпуклая (купольная) форма выполнения крыла 3. В данном случае, речь идет как о форме самого полотна 6 крыла 3, так и о наличии упруго деформированных стержневых элементов 8, поддерживающих профилированное полотно крыла, а также принимающих параболическую форму при взаимодействии с указанным полотном. Степень выпуклости задается степенью упругой деформации стержневых элементов, а также формой профилированного полотна крыла. Деформация стержневых элементов 8 обеспечивается, в общем случае, концевыми наконечниками 12, соединенными с полотном 6. Как было отмечено, дистальный конец стержневого элемента 8 вставлен в наконечник 12 на расстоянии меньшем, чем его длина в недеформированном состоянии. Изменяя расстояние от обвязки 11 до наконечника 12. регулируют степень упругой деформации стержневого элемента 8. Вместе с тем, поскольку форма стержневого элемента 8 задается также профилем полотна 6, пределы деформации зависят также и от формы профиля полотна 6.
Прижим упруго деформированных стержневых элементов 8 может обеспечиваться, в том числе, размещением указанных элементов в рукавах 13, соединенных с полотном 6 крыла 3.
Полотно 6 крыла 3 в различных вариантах изобретения может быть выполнено из термопластиков класса полиэфиров, в частности ПЭТФ (майлар, лавсан, дакрон), синтетических полиамидов (нейлон, кордура) и иных аналогичных материалов, способных обеспечить восприятие нагрузок при маховых движениях крыльев и обладающих высокую устойчивость к деформации и износостойкость.
На фиг. 12 приведен силовой набор 5 крыла 3 в варианте исполнения, при котором упруго деформированный стержневой элемент 8 выполнен составным. Для соединения секций стержневого элемента 8 может быть использована втулка 14, которая может быть выполнена с возможностью разъема в месте сопряжения участков стержня 8, таким образом, что между указанными участками образуется некоторый тупой угол.
Частым случаем предусмотрена иная форма крыла, образованная двумя поверхностями: верхняя - раскрытым выше профилированным полотном 6 крыла 3, нижняя - плоским полотном 27 (фиг. 21), закрепленным между лонжероном 7, нервюрой 9 и наконечниками 12 стержневых элементов 8.
Крылья 3 могут совершать маховые движения в одном направлении, так как они жестко связаны с элементами привода 4. Например, крылья могут совершать маховые движения в вертикальном направлении или под некоторым заданным углом к вертикали, в зависимости от положения дуговой направляющей 22.
В корпусе 2 летательного аппарата может быть установлен, по меньшей мере, один привод 4, содержащий двигатель 15, трансмиссию 16 и, по меньшей мере, пару кривошипных механизмов 17. Положение привода 4 по отношению к корпусу 2 задается термином «установлен». В данном случае, необходимо понимать, что привод 4 таким образом соединен с корпусом 2, что целостность и взаимодействие элементов привода обеспечивается именно соединением с корпусом аппарата. В данном случае, допускается как внутренняя, так и наружная установка привода 4, обусловленная функциональным назначением аппарата. Один привод 4 может содержать и более двух кривошипных механизмов 17, в частных случаях, сообщающих движение крыльям 3 аппарата. Тем не менее, изобретением может быть предусмотрено снабжение устройства несколькими независимыми приводами 4, каждый из которых связан, например, со своей парой крыльев. Привод 4 также может быть снабжен средствами контроля его работы, включающими, например, блоки управления, радиосвязи, топливные элементы. В ряде случаев, может быть предусмотрено сообщение движения кривошипным механизмам 17 непосредственно от двигателя 15, таким образом, что двигатель соединен с одним из концов вала кривошипного механизма.
Двигатель 15 может быть выполнен электрическим, механическим, например, с маховиком или пружиной, или ДВС. Конструкция двигателя 15 должна обеспечивать сообщение крутящего момента кривошипному механизму, а сам двигатель - должен быть связан с трансмиссией соответствующего типа и обладать подходящим для функционирования летального аппарата весом.
Конструкция трансмиссии 16 может быть выполнена как показано на Фиг. 20 или в ином виде. Основным требованием к трансмиссии для цели настоящего изобретения является передача вращающего момента от двигателя 15 к кривошипному механизму 17. В ряде случаев, конструкцией трансмиссии предусмотрена синхронизация вращения кривошипных механизмов, обусловленная, в том числе, соответствующими передаточными числами.
Кривошипный механизм 17 как элемент привода 4 содержит коленчатый вал 18 с наклонной шейкой, установленный в подшипниках 19, на котором установлена, с возможностью независимого вращения, качающаяся шайба 20, соединенная с пальцем 21, дистальный конец которого размещен в дуговой направляющей 22. В ряде случаев, коленчатый вал 18 может быть выполнен составным, т.е. отдельными узлами вала являются коренные шейки 23, щеки 24 и наклонная шейка 25. В иных же случаях, предусмотрено выполнение вала 18 цельной деталью. Качающаяся шайба 20 может иметь, по существу, любую форму, позволяющую, однако, иметь центральное отверстие, соединяться с пальцем 21 и с элементами крыла 3.
Соединение крыла и привода реализовано посредством соединителя 26, как показано на Фиг. 1-3.
Устройство работает следующим образом. Запуск двигателя 15 приводит в движение элементы трансмиссии 16, сообщающие вращательный момент кривошипным механизмам 17, валы 18 которых начинают вращение в противоположенные стороны. Вращение вала 18 вынуждает качающуюся шайбу 20 совершать колебательные движения относительно центра. Вместе с тем, в общем случае реализации, вращательный момент не передается от вала 18 качающейся шайбе 20, поскольку последняя закреплена на шейке вала 25 с возможностью скольжения. Качающаяся шайба 20 отклоняется на некоторый угол α относительно оси вращения вала 18 (ось показана на фиг. 19), палец 21 начинает скольжение по дуговой направляющей 22, а крыло 3, соединенное через переходник 26 с противоположной стороной качающейся шайбы 20, начинает совершать машущее движение. Достигнув крайнего значения угла α, зависящего от угла наклона шейки 25 вала 18, качающаяся шайба 20 начинает противоположное движение. В этот момент палец 21 достигает своего крайнего положения на дуговой направляющей 22, а крыло 3 находится в крайней точки маха.
Изменение положения дуговой направляющей 22 относительно оси вращения вала 18, как показано на фиг. 15, приводит к изменению траектории колебания шайбы 20, приводя к изменению траектории, описываемой крылом 3 аппарата 1.
Варианты реализации настоящего изобретения не ограничиваются приведенными выше примерами конкретного выполнения. Могут быть предложены и иные формы реализации технического решения, не отдаляясь от смысла изобретения. Варианты реализации изобретения могут предусматривать снабжение крыльев количества более двух, например, четырех и более. Корпус аппарата также может быть модифицирован для размещения в нем (или на нем) полезной нагрузки. Конфигурация и взаимное расположение узлов и элементов аппарата, если об этом прямо не сказано в описании также может варьироваться. Вместе с тем, некоторые конфигурации были раскрыты в настоящем описании.
Раскрытые выше примеры выполнения приведены с целью показать промышленную применимость устройства и дать общее впечатление о возможностях предложенного аппарата. Объем правовой охраны технического решения определяется формулой изобретения, а не представленным описанием, и все изменения, совершенные с применением эквивалентных признаков подпадают под правовую охрану настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ОРНИТОПТЕРА | 2002 |
|
RU2236988C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2011 |
|
RU2467923C1 |
| ЛЕТАЮЩИЙ ЗАВОДНОЙ ВЕРТОЛЕТ | 2010 |
|
RU2452871C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |


Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с маховым движением крыльев. Летательный аппарат с машущими крыльями содержит корпус, крылья и привод. Привод состоит из двигателя, трансмиссии и кривошипных механизмов, выполненных в виде коленчатого вала с наклонной шейкой, снабженного качающейся шайбой, выполненной с возможностью совершения колебательных движений относительно точки, расположенной вблизи оси вращения коленчатого вала кривошипного механизма. Качающаяся шайба жестко соединена со стержневым элементом силового набора крыла и снабжена пальцем. Палец выполнен с возможностью скольжения по установленной в плоскости кривошипного механизма дуговой направляющей. Каждое крыло аппарата выполнено в виде консоли купольной формы, образованной профилированным полотном крыла и силовым набором крыла, состоящим из множества радиально расположенных стержневых элементов, включающих лонжерон крыла, упруго деформированный стержневой элемент крыла и нервюру крыла, лежащую в плоскости лонжерона. Обеспечивается оптимальная траектория движения крыла, улучшение управляемости, увеличение подъемной силы. 12 з.п. ф-лы, 21 ил.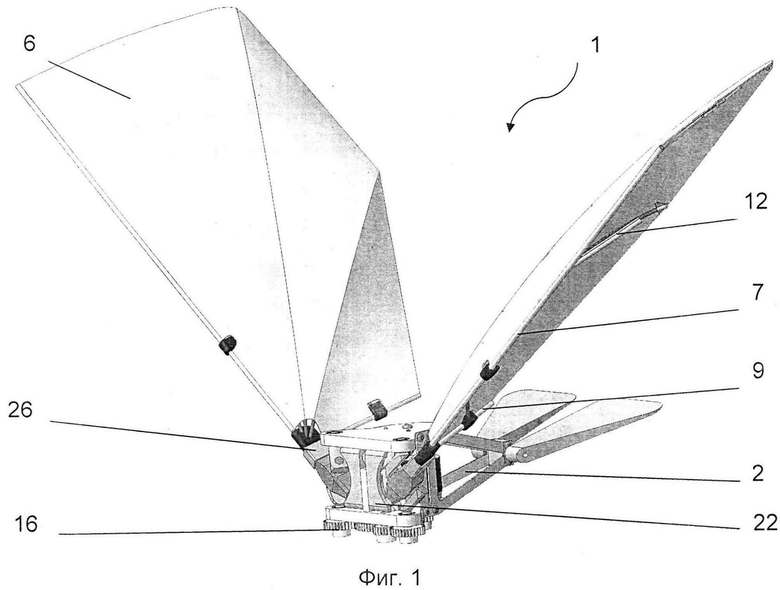
1. Летательный аппарат с машущими крыльями, содержащий корпус, крылья и привод, состоящий из двигателя, трансмиссии и кривошипных механизмов, выполненных в виде коленчатого вала с наклонной шейкой, снабженного, по существу, качающейся шайбой, выполненной с возможностью совершения колебательных движений относительно точки, расположенной, по существу, вблизи оси вращения коленчатого вала кривошипного механизма, отличающийся тем, что качающаяся шайба жестко соединена, по меньшей мере, с одним элементом силового набора крыла и снабжена пальцем, выполненным с возможностью скольжения по установленной в плоскости кривошипного механизма дуговой направляющей с центром, находящимся в окрестности точки, относительно которой совершаются колебательные движения качающейся шайбы, при этом каждое крыло аппарата выполнено в виде консоли купольной формы, образованной профилированным полотном и силовым набором крыла, состоящим из множества радиально расположенных стержневых элементов, включающих лонжерон крыла, упруго деформированный стержневой элемент крыла, выполненный, по существу, изоморфным профилированному полотну крыла, и нервюру крыла, лежащую в плоскости лонжерона.
2. Аппарат по п. 1, отличающийся тем, что крыло дополнительно снабжено нижней обшивкой, выполненной таким образом, что профиль крыла приобретает плосковыпуклую форму.
3. Аппарат по п. 1, отличающийся тем, что крыло дополнительно содержит диагональный стержневой элемент силового набора крыла, концы которого соединены с лонжероном крыла и корневой нервюрой крыла, соответственно.
4. Аппарат по п. 3, отличающийся тем, что диагональный стрежневой элемент силового набора крыла выполнен упруго деформированным.
5. Аппарат по п. 1, отличающийся тем, что профилированное полотно крыла является предварительно сформированным.
6. Аппарат по п. 1, отличающийся тем, что дуговая направляющая выполнена с возможностью наклона относительно оси вращения кривошипного механизма.
7. Аппарат по п. 1, отличающийся тем, что корневые части вала кривошипного механизма установлены на подшипниках, а ось вращения кривошипного механизма, по существу, перпендикулярна продольной оси летательного аппарата.
8. Аппарат по п. 1 отличающийся тем, что элементы силового набора крыла полностью или частично помещены в рукава, присоединенные к профилированному полотну крыла.
9. Аппарат по п. 1, отличающийся тем, что дистальный конец упруго деформированного стержневого элемента силового набора крыла зафиксирован относительно консоли крыла таким образом, что точка фиксации дистального конца упруго деформированного стержневого элемента силового набора крыла находится на расстоянии от проксимального конца, меньшем, чем собственная длина стержневого элемента силового набора крыла.
10. Аппарат по п. 9, отличающийся тем, что фиксация дистального конца упруго деформированного стержневого элемента силового набора крыла выполнена посредством наконечника.
11. Аппарат по п. 10, отличающийся тем. что наконечник выполнен с возможностью регулирования степени деформации упруго деформированного стержневого элемента.
12. Аппарат по п. 1, отличающийся тем, что дистальный конец пальца, которым снабжена качающаяся шайба, содержит шариковую головку или подшипник.
13. Аппарат по п. 1, отличающийся тем, что, по меньшей мере, один из упруго деформированных стержневых элементов силового набора выполнен составным.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| Механизм привода крыла орнитоптера | 1979 |
|
SU878652A1 |
| US 20070138339 A1, 21.06.2007 | |||
| СПОСОБ МНОГОКООРДИНАТНОГО ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ СТАНКА С ШАГОВЫМ ДВИГАТЕЛЕМ | 1957 |
|
SU120398A1 |

