Изобретение относится к машиностроению, а именно к механизмам, используемым в общем машиностроении.
Известен «Механизм для перемещения и ориентации деталей» [1], в котором движение осуществляется путем подачи жидкости в подпоршневые полости гидроцилиндров. Этот механизм содержит в своем составе основание и размещенные на нем механические руки со схватами, установленные с возможностью перемещения и контактирования с упорами, расположенными на основании, при этом схваты в нем соединены с механическими руками цилиндрическими шарнирами. Недостатком такого механизма является невозможность обеспечивать движение выходного звена по плоским кривым.
Известен также «Cartesian parallel manipulators» [2], предназначенный для захвата и перемещения объектов. Этот механизм содержит одну подвижную платформу, соединенную с основанием посредством трех гидроцилиндров через поступательные пары и со стойкой через шатуны с вращательными парами. Этот механизм относится к механизмам с одной платформой.
Наиболее близким к предлагаемому механизму является пространственный механизм «Three-dimensional, adjustable universal joint, for robotics, manipulators» [3], содержащий в своем составе две подвижные платформы. Первая платформа соединена с основанием посредством шести гидроцилиндров, соединенных с ней в три кинематические пары. Вторая платформа связана с первой посредством шатунов, соединенных попарно в три кинематические пары на каждой платформе и одного гидроцилиндра поступательного движения. Этот платформенный механизм не может обеспечить движение его фиксированных точек по заданным плоским кривым.
Задачей предлагаемого механизма является воспроизведение разнообразных плоских кривых выходным звеном, т.е. второй платформой.
Сущность изобретения заключается в том, что предлагается плоский двухплатформенный механизм с тремя приводами, включающий три гидроцилиндра с поршнями и штоками, связанными с четырехпарной платформой, и дополнительную платформу, при этом дополнительная платформа шарнирно связывается со штоками двух из трех приводных гидроцилиндров через шатун, а третьим шарниром посредством шатуна соединяется с основной.
Общий вид предлагаемого механизма показан на чертеже.
Механизм состоит из трех гидроцилиндров 1, 3, 5, трех поршней со штоками 2, 4, 6, платформы 7 в виде четырехпарного звена, трех шатунов 8, 9, 10 и дополнительной платформы 11.
Работает механизм следующим образом. При задании движения трем поршням со штоками 2, 4, 6 гидроцилиндры 1, 3, 5 получают вращательное движение относительно опор O1, О2, О3. При этом платформа 7 начинает совершать плоскопараллельное движение. Через шатуны 8, 9 и 10 плоскопараллельное движение получает дополнительная платформа 11. В результате такого движения точки дополнительной платформы 11 получают необходимые сложные плоские траектории движения. В зависимости от назначения механизма можно выбирать любой закон движения точек, принадлежащих дополнительной платформе 11.
Если остановить движение одного из трех гидроцилиндров, то механизм будет двигаться при задании движения в двух оставшихся гидроцилиндрах. Если остановить движение в двух из трех гидроцилиндрах, то механизм останется подвижным при задании движения в одном оставшемся гидроцилиндре. Если остановить движение во всех трех гидроцилиндрах, то механизм примет неподвижное состояние.
Подвижность плоских рычажных механизмов определяется формулой Чебышёва П.Л., имеющей вид [4, стр.53, формула 3.1]

Здесь W - подвижность механизма, n - число подвижных звеньев, р5 - число кинематических пар пятого класса (одноподвижных).
В предлагаемом механизме число подвижных звеньев n=11, кинематических пар (пятого класса) p5=15.
По формуле (1) получим
W=3n-2p5=3·11-2·15=33-30=3.
При отключении одного привода число звеньев в предлагаемом механизме станет равным n=10, а кинематических пар р5=14. Тогда по (1) получим
W=3·10-2·14=30-28=2.
При отключении двух приводов число звеньев и кинематических пар станет равным 9 и 13 соответственно. Тогда по (1) получим
W=3·9-2·13=27-26=1.
При отключении всех приводов по (1) получим
W=3·8-2·12=24-24=0.
Отсюда следует, что данный плоский двухплатформенный механизм с тремя приводами вполне работоспособен.
Источники информации
1. SU 1366389 (Московский институт электронного машиностроения и Институт машиноведения им. А.А.Благонравова), 15.01.1988, фиг.1-5.
2. US 2003121351 (Gosselin Clement и др.), 03.07.2003, фиг.1-4.
3. DE 19606521 (Prieto Doerfel Daniel), 16.10.1997, фиг.1-2.
4. Артоболевский И.И. Теория механизмов и машин: Учебник для втузов. - 4-е изд. перераб. и доп. - М.: Наука. Гл. ред. физ.-мат. лит., 1988. - 640 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛНОПОВОРОТНЫЙ ДВУХКРИВОШИПНЫЙ ПЛОСКИЙ МЕХАНИЗМ С ПОДВИЖНЫМ ЛИНЕЙНЫМ ГИДРОПРИВОДОМ | 2012 |
|
RU2520623C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ С ДВОЙНЫМ ПРИВОДОМ | 2010 |
|
RU2440525C1 |
| ДВУХУРОВНЕВЫЙ МАНИПУЛЯТОР С ЗАМКНУТОЙ КИНЕМАТИЧЕСКОЙ ЦЕПЬЮ | 2013 |
|
RU2532751C2 |
| МЕХАНИЗМ С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ | 2012 |
|
RU2514322C1 |
| МЕХАНИЗМ ДЛЯ ОПРОКИДЫВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ С ДВУМЯ ГИДРОДОМКРАТАМИ | 2011 |
|
RU2470194C1 |
| УРАВНОВЕШЕННЫЙ САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2009 |
|
RU2397384C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2010 |
|
RU2419006C1 |
| ТРЕХЩЕКОВАЯ ДРОБИЛЬНАЯ МАШИНА | 2013 |
|
RU2529918C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
Изобретение относится к механизмам, используемым в общем машиностроении. Плоский двухплатформенный механизм с тремя приводами включает три гидроцилиндра с поршнями и штоками, связанными с четырехпарной платформой, и дополнительную платформу. При этом дополнительная платформа шарнирно связана со штоками двух из трех приводных гидроцилиндров через шатуны, а третьим шарниром соединена посредством шатуна с основной платформой. Изобретение направлено на создание воспроизведения разнообразных плоских кривых выходным звеном - дополнительной платформой. 1 ил.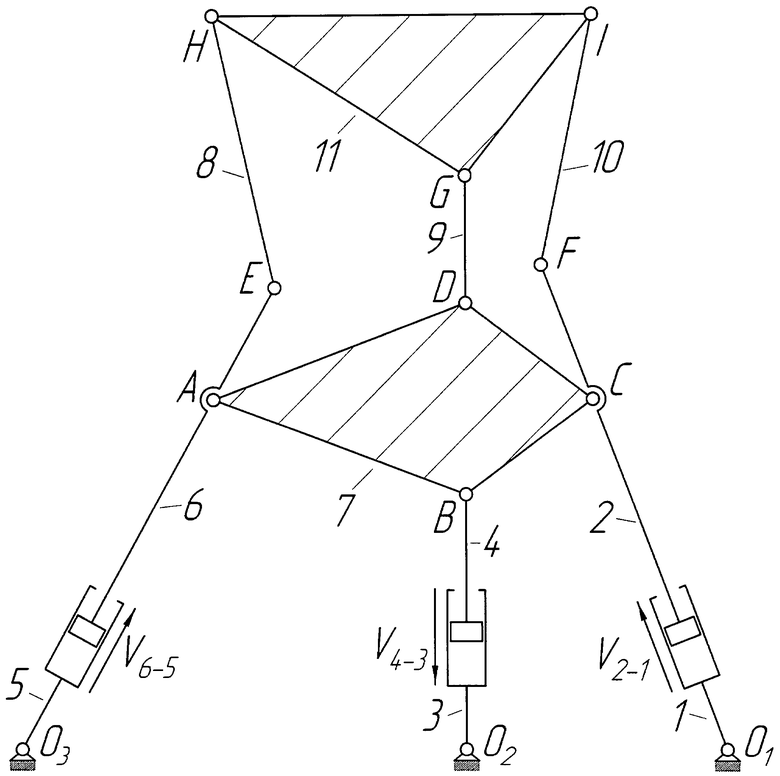
Плоский двухплатформенный механизм с тремя приводами, включающий три гидроцилиндра с поршнями и штоками, связанными с четырехпарной платформой, и дополнительную платформу, отличающийся тем, что дополнительная платформа шарнирно связана со штоками двух из трех приводных гидроцилиндров через шатуны, а третьим шарниром соединена посредством шатуна с основной платформой.
| DE 19606521 C1, 16.10.1997 | |||
| DE 19710171 A1, 17.09.1998 | |||
| US 6729202 B2, 04.05.2004 | |||
| Плоский механизм | 1991 |
|
SU1779575A1 |

