Изобретение относится к механизмам, применяемым в технике для опрокидывания платформы транспортного средства.
Известен опрокидыватель с одним гидродомкратом [1], используемый на самосвалах. Недостатком этого опрокидывателя является невозможность опрокидывать груз на две противоположенные стороны.
Наиболее близким к предлагаемому механизму является гидравлическое устройство для повышения устойчивости транспортных средств, по патенту РФ №2249521 [2], которое состоит из платформы, связанной шарниром с транспортным средством и снабженной двумя гидродомкратами, способными опрокидывать платформу в противоположенные стороны. Недостатком этого механизма является то, что при указанных в изобретении гидравлических связях он работает с принуждением.
Задачей изобретения является обеспечение беспрепятственной возможности опрокидывания платформы при одновременном задании движения в обоих гидродомкратах.
Сущность заявляемого технического решения заключается в том, что механизм для опрокидывания грузовой платформы с двумя гидродомкратами, включающий в себя грузовую платформу в виде трехшарнирного звена, соединенного двумя шарнирами со штоками поршней гидродомкратов, связанных шарнирами гидроцилиндров со стойкой, дополнительно содержит коромысло, посредством которого трехшарнирное звено соединено со стойкой.
На чертеже изображен механизм для опрокидывания грузовой платформы с двумя гидродомкратами. Механизм включает в себя два гидродомкрата, состоящие соответственно из гидроцилиндров 1, 2, поршней со штоками 3, 4, грузовой платформы 5 в виде трехшарнирного звена и дополнительного коромысла 6, связывающего указанное звено со стойкой.
Работает механизм следующим образом. При подаче рабочей жидкости в нижнюю полость гидроцилиндра 1 и верхнюю полость гидроцилиндра 2 приводятся в движение поршень со штоком 3 относительно гидроцилиндра 1 и поршень со штоком 4 относительно гидроцилиндра 2. При этом штоки 3 и 4 наклоняют вправо грузовую платформу - звено 5, соединенную со стойкой через дополнительный шатун 6.
Аналогичным образом можно наклонить грузовую платформу - звено 5 влево, подавая рабочую жидкость в верхнюю полость гидроцилиндра 1 и в нижнюю полость гидроцилиндра 2.
Работоспособность механизма при двух независимых приводах доказывается формулой Чебышева П.Л. [3]

где W - подвижность механизма;
n - число подвижных звеньев;
p5 - число одноподвижных кинематических пар.
В схеме механизма для опрокидывания грузовой платформы, показанной на чертеже, число подвижных звеньев равно шести (1, 2, 3, 4, 5 и 6). Число одноподвижных пар равно восьми (шарнир O1, поступательная пара относительного движения звеньев 1 и 3, шарниры А, В, С, О2 и О3, поступательная пара относительного движения звеньев 2 и 4). Подставив n=6 и р5=8 в формулу (1), получим, что
W=3n-2p5=3·6-2·8=2.
Т.е. этот механизм является двухподвижным и в нем необходимо задавать два независимых движения.
Источники информации
1. Крайнев А.Ф. Механика машин. Фундаментальный словарь. М.: Машиностроение, 2000, с.636.
2. Патент №2249521 «Гидравлическое устройство для повышения устойчивости транспортных средств», опубликовано 10.04.2005. Бюл. №10.
3. Артоболевский И. И. Теория механизмов и машин: учебник для вузов / И.И.Артоболевкий - М.: Наука, 1965, с.79, формула 33.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2003 |
|
RU2234606C1 |
| ПЕРЕДВИЖНОЙ БОКОВОЙ ОПРОКИДЫВАТЕЛЬ БОРТОВЫХ ГРУЗОВЫХ АВТОМОБИЛЕЙ | 1967 |
|
SU195958A1 |
| ВАГОНЕТКА КАБЕЛЬНОГО КРАНАДЛЯ ТРАНСПОРТИРОВАНИЯ СЫПУЧИХИ КОНСИСТЕНТНЫХ ГРУЗОВ | 1971 |
|
SU420545A1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2010 |
|
RU2439329C1 |
| Опрокидыватель рельсового транспортного средства | 1982 |
|
SU1158464A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2005 |
|
RU2303699C1 |
| Транспортное средство с погрузочно- разгрузочным устройством | 1976 |
|
SU734034A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
Изобретение относится к механизмам, применяемым в технике для опрокидывания платформы транспортного средства. Механизм для опрокидывания грузовой платформы с двумя гидродомкратами, включающий в себя грузовую платформу в виде трехшарнирного звена, соединенного двумя шарнирами со штоками поршней гидродомкратов, связанных шарнирами гидроцилиндров со стойкой, дополнительно содержит коромысло, посредством которого трехшарнирное звено соединяется со стойкой. Изобретение обеспечивает беспрепятственную возможность опрокидывания платформы при одновременном задании движения в обоих гидродомкратах. 1 ил.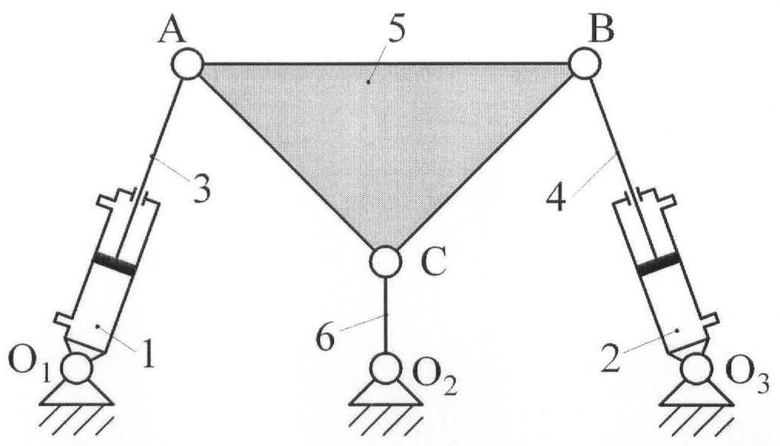
Механизм для опрокидывания грузовой платформы с двумя гидродомкратами, включающий в себя грузовую платформу в виде трехшарнирного звена, соединенного двумя шарнирами со штоками поршней гидродомкратов, связанных шарнирами гидроцилиндров со стойкой, отличающийся тем, что механизм дополнительно содержит коромысло, посредством которого грузовая платформа в виде трехшарнирного звена соединена со стойкой.
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2249521C1 |
| Механизм для опрокидывания кузова автотракторного прицепа | 1959 |
|
SU132084A1 |
| УСТРОЙСТВО для СИНХРОННОГО ОГРАНИЧЕНИЯ ХОДА ПОРШНЕЙ В ЦИЛИНДРАХ | 0 |
|
SU354180A1 |
| Способ устранения метатарзалгии и деформации пальцев при поперечном плоскостопии | 2018 |
|
RU2675455C1 |
| Совмещенная электромашинная обмотка | 1986 |
|
SU1444918A1 |

