Название изобретения.
Привод с компенсацией усилий управления мягким крылом на стропной поддержке.
Область техники, к которой относится изобретение.
Транспортирование; Воздухоплавание, авиация, космонавтика; Летательные аппараты тяжелее воздуха. Управление и автоматическое регулирование ветряных двигателей.
Уровень техники.
Мягкие крылья на стропной поддержке нашли применение в летательных аппаратах, системах точного десантирования, в качестве парусного или поддерживающего привязного средства. Управление такими крыльями обычно ведется подтягиванием вниз задних кромок крыльевых консолей, и имеет следующие особенности:
1. Управление ведется подмоткой строп управления, причем в зависимости
от режима на стропе всегда в той или иной степени присутствует натяжение. Соответственно, на питание приводов приходится постоянно затрачивать энергию, или использовать более сложные и тяжелые приводы с самоторможением, (например описанного в RU 2524498 или RU 2641563 вида).
2. Управление характеризуется большими и быстрыми рабочими ходами, а также неравномерной нагрузкой, что вынуждает использовать более мощные и тяжелые приводы, рассчитанные на пиковую нагрузку, или использовать накопители энергии.
3. Аэродинамическая компенсация усилий на органах управления в данном случае неприменима.
Известны попытки уменьшить массу и сложность приводов управления мягким крылом на стропной поддержке путем изменения схемы управления на балансирную, однако такая схема не позволяет контролировать стабилизацию крыла, а также менять режим полета. Известны также приводы с компенсацией усилий в полиспастном механизме, присоединенном к свободным концам так, чтобы обеспечивать компенсацию вытягивающего полиспаст усилия от передней части крыла стягивающим полиспаст усилием от задней части крыла. Ближайшим аналогом являются свободные концы с компенсацией управляющего усилия, состоящие из свободных концов с петлями подцепки подвесной системы внизу и петлями крепления строп вверху, на среднем свободном конце которых установлен полиспастный механизм, имеющий не менее двух пар блоков, и соединенный с задним свободным концом так, что при втягивании заднего свободного конца в полиспастный механизм средний свободный конец за счет работы полиспаста удлиняется (патент на изобретение RU 2456210). Недостатком данного решения является то, что в связи с дискретностью редукции усилий в полиспастном механизме полностью скомпенсировать усилия на стропах управления невозможно.
Раскрытие изобретения.
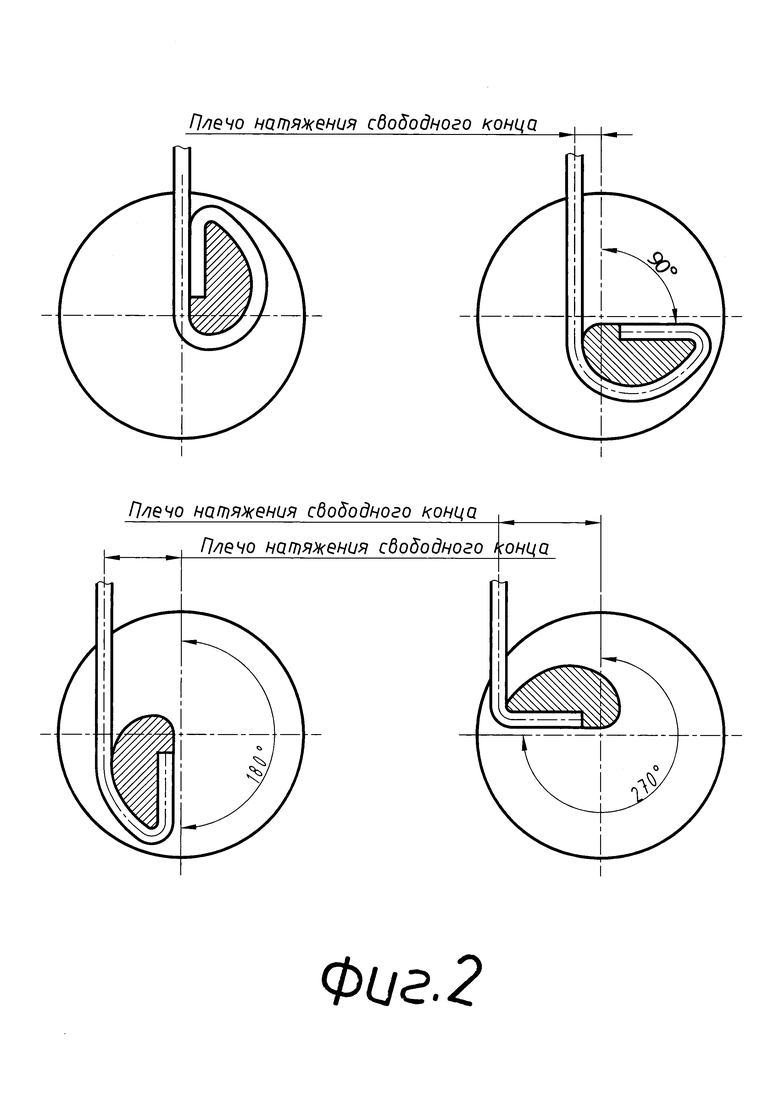
Настоящим решением предлагается выполнить привод управляющей стропой в виде редуктора, выполняющего функцию рычага, или непосредственно рычага, к переднему плечу которого присоединены свободные концы одной или нескольких шеренг (или одного или нескольких рядов) строп, а к заднему плечу - стропа управления, так, как схематически изображено на фиг. 1 и фиг. 3. Переднее плечо такого редуктора выполняется в виде кулачка переменного радиуса 1, на который наматываются свободные концы одной или нескольких шеренг строп 2, а заднее плечо выполняется в виде барабана 3 для намотки стропы управления 4, или в простейшем случае удлиненного плеча рычага 6 (фиг. 3). Форма кулачка переменного радиуса и величина редукции выбираются на основе экспериментальных данных об усилиях на соответствующих свободных концах по мере подтягивания стропы управления таким образом, чтобы усилие натяжения управляющей стропы как можно полнее компенсировалось усилием натяжения свободных концов в наиболее критичном по силе натяжения стропы управления режиме. Рабочий ход кулачка переменного радиуса в случае использования редуктора - три четвертых оборота (фиг. 2), соответственно, к нему может подключаться управляющий сервомеханизм 5 с углом отклонения меньше 360°.
Компенсация усилий в случае использования упрощенного механизма в виде разноплечего рычага (фиг. 3) имеет некоторые ограничения по точности, и компенсации доступно порядка четверти оборота рычага. Начиная от угла порядка 100 градусов, происходит перекомпенсация, и переднее плечо рычага в виде кулачка переменного радиуса усилием от сматывающихся свободных концов доворачивает рычаг до еще больших углов. Однако поскольку большие хода управления используются только на посадке для так называемого подрыва, когда крыло требуется резко затормозить и затем погасить, это свойство не препятствует выполнению приводом своей работы.
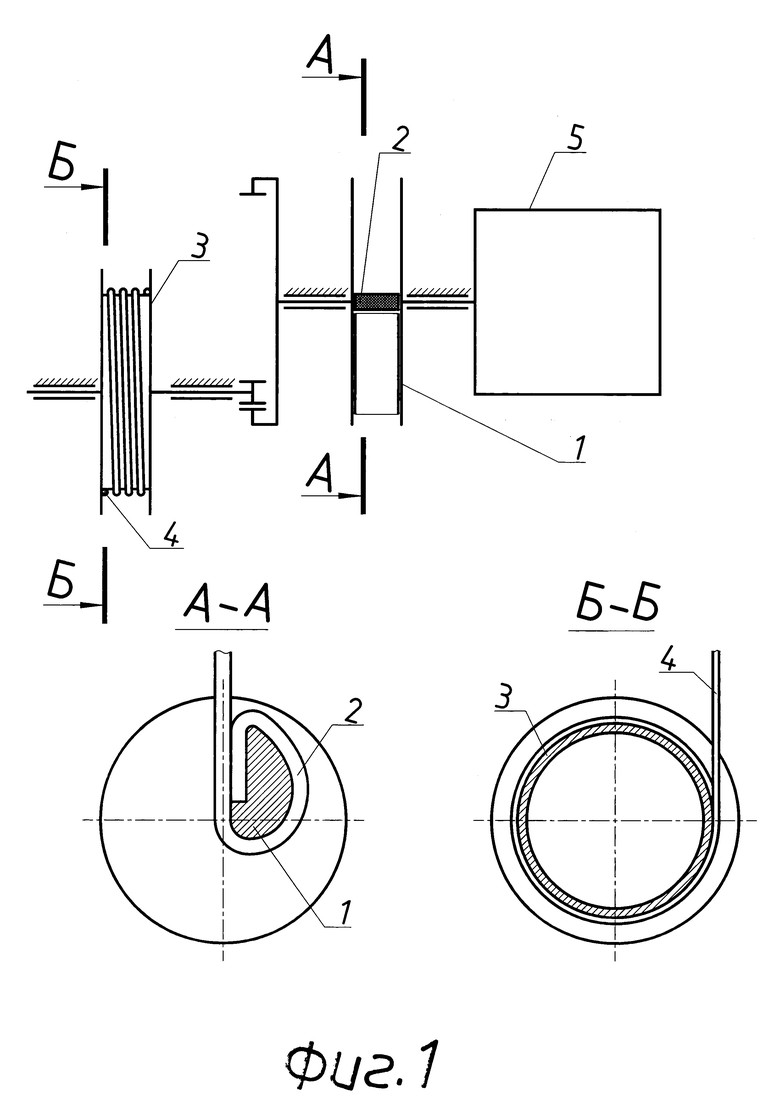
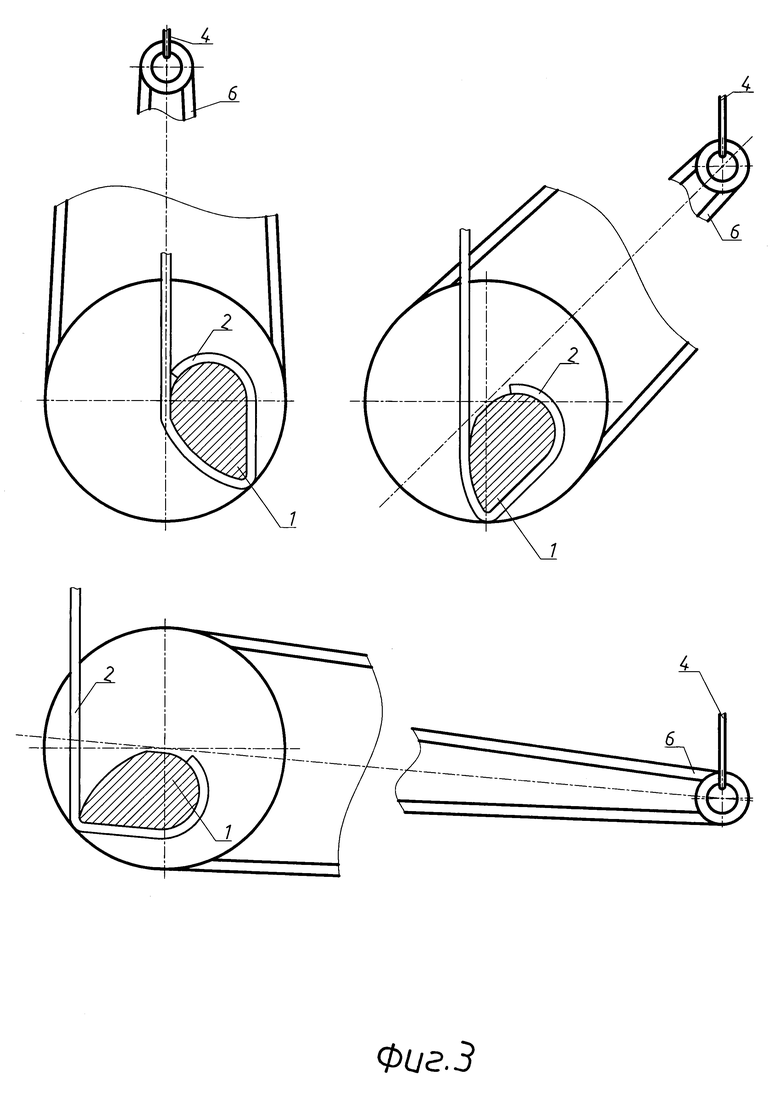
Изобретение относится к области точного десантирования, легкой авиации, транспортирования и генерации электроэнергии при помощи энергии ветра и может быть использовано для управления привязными и свободно летающими мягкими крыльями на стропной поддержке. В этом качестве предлагается привод управляющей стропой в виде редуктора, выполняющего функцию рычага, или непосредственно рычага, к переднему плечу которого присоединены свободные концы одной или нескольких шеренг (или одного или нескольких рядов) строп, а к заднему плечу - стропа управления. Переднее плечо такого редуктора выполняется в виде кулачка переменного радиуса, на который наматываются свободные концы одной или нескольких шеренг строп, а заднее плечо выполняется в виде барабана для намотки стропы управления или в простейшем случае удлиненного плеча рычага. Форма кулачка переменного радиуса и величина редукции выбираются на основе экспериментальных данных об усилиях на соответствующих свободных концах по мере подтягивания стропы управления таким образом, чтобы усилие натяжения управляющей стропы как можно полнее компенсировалось усилием натяжения свободных концов в наиболее критичном по силе натяжения стропы управления режиме. Заявленное изобретение обеспечивает возможность скомпенсировать усилия на стропах управления. 3 ил.
Привод управления мягким крылом на стройной поддержке, отличающийся тем, что исполнительный орган в виде барабана или рычага намотки стропы управления через редуктор или напрямую соединен с кулачком переменного радиуса, на который уложены один или несколько свободных концов одной или нескольких шеренг, или одного или нескольких рядов строп, при этом форма кулачка переменного радиуса и величина редукции выбираются такими, чтобы усилие натяжения управляющей стропы как можно полнее компенсировалось усилием натяжения свободных концов в наиболее критичном по силе натяжения стропы управления режиме.
| МЕХАНИЗМ ПОВОРОТА КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА С БАЛАНСИРНЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2267443C1 |
| МЕХАНИЗМ ПОВОРОТА КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА С БАЛАНСИРНЫМ УПРАВЛЕНИЕМ | 2000 |
|
RU2217352C2 |
| CN 109896416 A, 19.06.2009 | |||
| ИСПОЛНИТЕЛЬНЫЕ СИСТЕМЫ ДЛЯ УПРАВЛЕНИЯ ПОЛЕТОМ СИЛОВОГО ПРОФИЛЯ КРЫЛА ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВЕТРА В ЭЛЕКТРИЧЕСКУЮ ИЛИ МЕХАНИЧЕСКУЮ ЭНЕРГИЮ | 2011 |
|
RU2576396C2 |
| RU 2016114295 A, 16.10.2017. | |||

