Изобретение относится к области измерительной техники и может быть использовано в радиолокации и ультразвуковой локации, в частности, при измерении толщины металла электромагнитно-акустическими (ЭМА) толщиномерами.
Известен способ измерения временных интервалов [патент РФ №2099865]. Способ заключается в том, что импульс, длительность которого равна измеряемому временному интервалу, преобразуют в код грубого измерения и коды, соответствующие длительностям начального и конечного интерполяционных импульсов, а значение измеряемого временного интервала определяют по определенным формулам. Для определения скорректированных значений длительностей начального и конечного интерполяционных импульсов используют результаты предварительной калибровки. При калибровке тестовую последовательность подают на вход интерполяционного измерителя временных интервалов (ИВИ), период следования импульсов тестовой последовательности задают случайным. В каждой из обеих интерполяционных кодовых последовательностей определяют минимальное значение ее элементов и определяют количества элементов, имеющих упомянутые минимальное и максимальное значения, а корректировочные параметры, являющиеся результатами предварительной калибровки, Скорректированные значения длительностей начального и конечного интерполяционных импульсов также определяют по определенным соотношениям. Недостатками способа являются ограничения его применимости. Способ не может обеспечить высокую точность измерения, т.к. данный способ не предусматривает уточнения границ измеряемого интервала, заданных центрами радиоимпульсов.
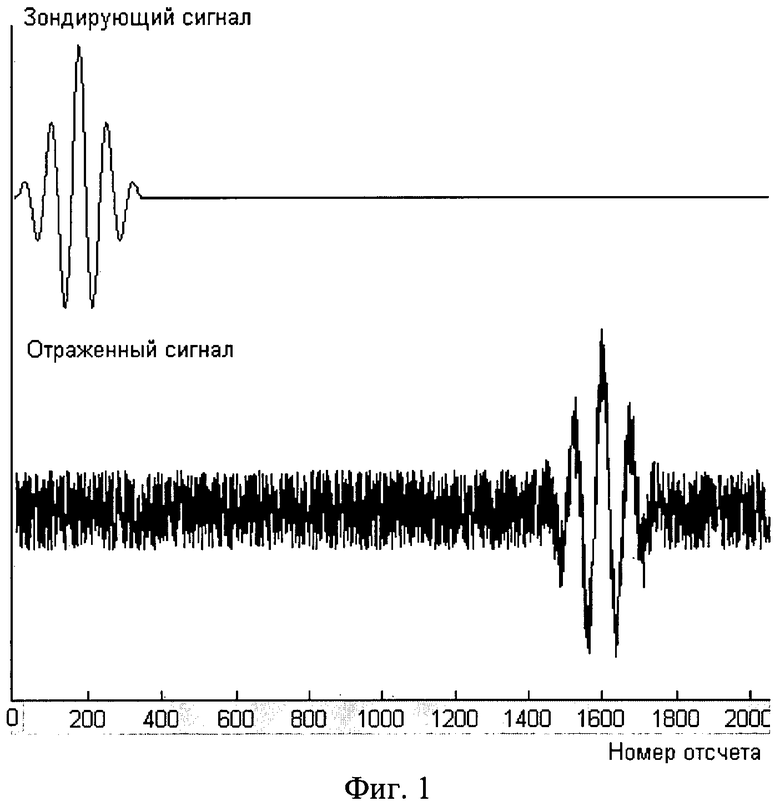
Известен способ измерения расстояния до объекта, выбранный за прототип [Основы радиолокации. Финкельштейн М.И. Учебное пособие. М.: Радио и связь, 1983, - 535 с.]. Способ основан на измерении времени задержки отраженного радиолокационного радиоимпульса от зондирующего радиоимпульса. Измерение дальности сводится к фиксации моментов излучения зондирующего сигнала и приема отраженного сигнала, измерению временного интервала между этими моментами. Время запаздывания Тз отраженного радиоимпульса относительно зондирующего с учетом известной скорости распространения радиоволн С позволяет определять расстояние D до объекта D=Тз∗С/2. Для цифрового измерения величины задержки отраженного радиоимпульса производится заполнение промежутка времени между центрами зондирующего и отраженного радиоимпульсов счетными (масштабными) импульсами. Положения центров определяют по максимуму амплитуды зондирующего и отраженного радиоимпульсов. При этом возникает погрешность измерения, вызванная рассогласованием первого и последнего счетных импульсов с центрами зондирующего и отраженного радиоимпульсов. Таким образом, недостаток способа - невысокая точность измерения расстояния.
Задачей изобретения является повышение точности измерения временного интервала между двумя радиоимпульсами.
Предложен способ измерения временных интервалов между моментом запуска зондирующего сигнала (радиоимпульса) и центром отраженного сигнала (радиоимпульса). Способ включает прием отраженного сигнала с последующим аналого-цифровым преобразованием этого сигнала с момента времени запуска зондирующего сигнала, определение номера jmax элемента числового массива, соответствующего центру отраженного сигнала, создание в окрестности jmax 2к+1 эталонных сигналов, по форме соответствующих отраженному, центр каждого из которых смещают по отношению к центру отраженного сигнала с на величину jmax ∗(s/k-1)* b, где s=0, 1, 2,…2k, s - номер эталонного сигнала, коэффициент b=0…1 определяет размер окрестности вблизи центра отраженного сигнала. В этой окрестности будут находиться центры эталонных сигналов. Способ включает вычисление коэффициентов корреляции эталонных сигналов с отраженным, аппроксимацию зависимости коэффициентов корреляции 2к+1 эталонных сигналов с отраженным KK[m] от m, где m=jmax+jmax*(s/k-1)∗b, где s=0, 1, 2,…2k, число m определяет положения центра эталонного сигнала, выполнение передискретизации на основе найденной аппроксимирующей зависимости F(m) для массива KK[m] с увеличением количества элементов массива в R раз, т.е. формирование массива KK1[m1], где m1=jmax+jmax*(s1/(k*R)-1)*b, s1=0, 1, 2,…2k*R, R - коэффициент передискретизации больше 1, нахождение элемента m1max числового массива KK1[m1], соответствующего максимальному значению коэффициента корреляции KK1, значение m1max принимают за уточненный центр отраженного сигнала вместо jmax. Повторяют далее все предыдущие операции обработки сигнала, уменьшая каждый раз величину b, определяющую размер окрестности вблизи приближенного значения центра отраженного сигнала, в качестве приближенного значения центра отраженного сигнала выбирают новый уточненный центр отраженного сигнала m1max. После достижения требуемой точности приближения оценки положения центра отраженного сигнала, которую оценивают по величине разности между вычисленными значениями центров отраженного сигнала в результате текущего и предыдущего приближения, вычисляют значение временного интервала Т в единицах времени Т=m1max ∗dt, где dt - шаг дискретности по времени при измерении отраженного сигнала.
Отличительными признаками способа является обработка отраженного сигнала, в результате чего центр отраженного сигнала можно определить точно при любой его форме, а при наличии шума в несколько раз с большей точностью, чем при использовании известного способа, основанного на определении положения центра по максимуму амплитуды отраженного сигнала. Идея предлагаемого способа измерения временных интервалов заключается в том, что значение центра jmax отраженного сигнала, определенное по принципу положения максимума амплитуды отраженного сигнала и вычисленного на его основе временного интервала, используют только для грубой оценки (начального приближения) величины временного интервала. Для получения более точного значения временного интервала производят формирование 2к+1 эталонных сигналов, соответствующих по форме отраженному сигналу [фиг.1], но имеющих смещенные центры относительно центра jmax отраженного сигнала на величину jmax*(s/k-1)*b, где s=0, 1, 2,…2k, k - коэффициент, больший или равный 3. Значение b и k задают в интервале от 0 до 1 с учетом возможной погрешности приближенного значения центра отраженного сигнала. Например, b=0.1, k=3, если погрешность оценки приближенного значения временного интервала не превышает 10%, если возможна ошибка грубой оценки до 90%, то задают значение b=0.9 и k=25. Далее вычисляют коэффициенты корреляции исходного отраженного сигнала со всеми эталонными KK[m], m=jmax+jmax*(s/k-1)*b, находят с помощью аппроксимации непрерывную функциональную зависимость F(m), соответствующую массиву KK[m], выполняют передискретизацию на основе найденной аппроксимирующей зависимости F(m) для массива KK[m] с увеличением количества элементов массива в R раз, т.е. производят формирование массива KK1[m1], где m1=jmax+jmax*(s1/(k*R)-1)*b, s1=0, 1, 2,…2k*R, R - коэффициент передискретизации, например, равный 10, находят элемент массива m1max, соответствующий максимальному значению коэффициента корреляции KK1, значение m1max, принимают за уточненный центру отраженного сигнала. Функция F(m) имеет вид параболы, обращенной вершиной вверх, с явно выраженным максимумом как в случае незашумленного, так и зашумленного отраженного сигнала, что и позволяет определить временной сдвиг отраженного сигнала более точно. При наличии шума форма функции сохраняется, уменьшается лишь абсолютное значение максимума. Процесс уточнения значения временного интервала итерационно повторяется, в начале итерации в качестве начального приближения используется уточненное значение m1max, полученное в результате предыдущей итерации. Повторение операций обработки прекращают после достижения требуемой точности приближения оценки положения центра отраженного сигнала, которую оценивают по величине разности между вычисленными значениями центров отраженного сигнала в результате текущего и предыдущего приближения. После этого вычисляют значение временного интервала Т в единицах времени Т=m1max*dt, где dt - шаг дискретности по времени при измерении отраженного сигнала. В результате будет получено значение временного интервала в R раз с меньшей погрешностью, чем шаг дискретности по времени dt при измерении сигнала. Кроме того, при зашумленности отраженного сигнала значение временного интервала предлагаемым способом будет получено в несколько раз более точно по сравнению с известным способом.
Таким образом, совокупность отличительных признаков необходима и достаточна для решения поставленной задачи.
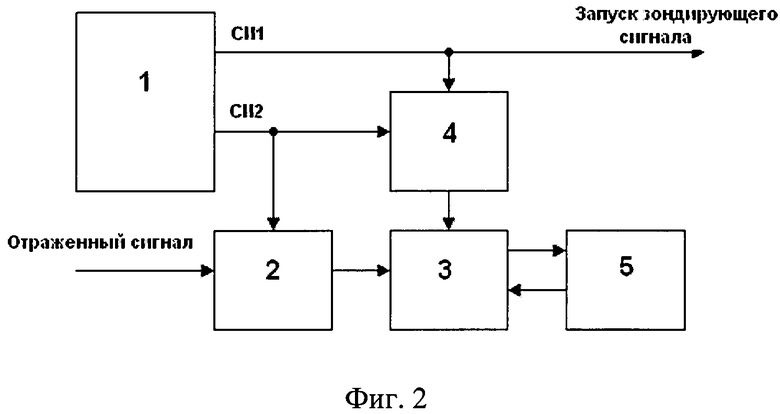
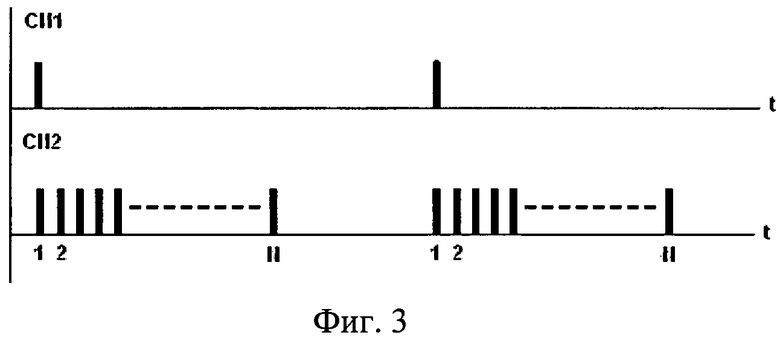
Схема устройства для возможной реализации предлагаемого способа измерения временных интервалов представлена на фиг.2. Устройство включает 1 - генератор синхронизирующих импульсов СИ1 и СИ2, 2 - аналого-цифровой преобразователь, 3 - оперативное запоминающее устройство (ОЗУ), 4 - счетчик адреса ОЗУ, 5 - вычислитель. На фиг.3 приведена временная диаграмма синхронизирующих импульсов СИ1 и СИ2. Генератор синхронизирующих импульсов 1 вырабатывает синхронизирующий импульс СИ1, который инициализирует выработку одиночного зондирующего сигнала, имеющего форму, соответствующую приведенной на фиг.1. Математическое описание зондирующего сигнала, необходимое для формирования эталонных сигналов, может быть получено в результате его аппроксимации, значения коэффициентов аппроксимирующего выражения могут быть найдены с использованием какого-либо метода оптимизации, например метода Гаусса-Зейделя [Методы оптимизации в теории управления. Уч. пособие, Черноруцкий И.Г., СПб.: литер, 2004, 256 с.]
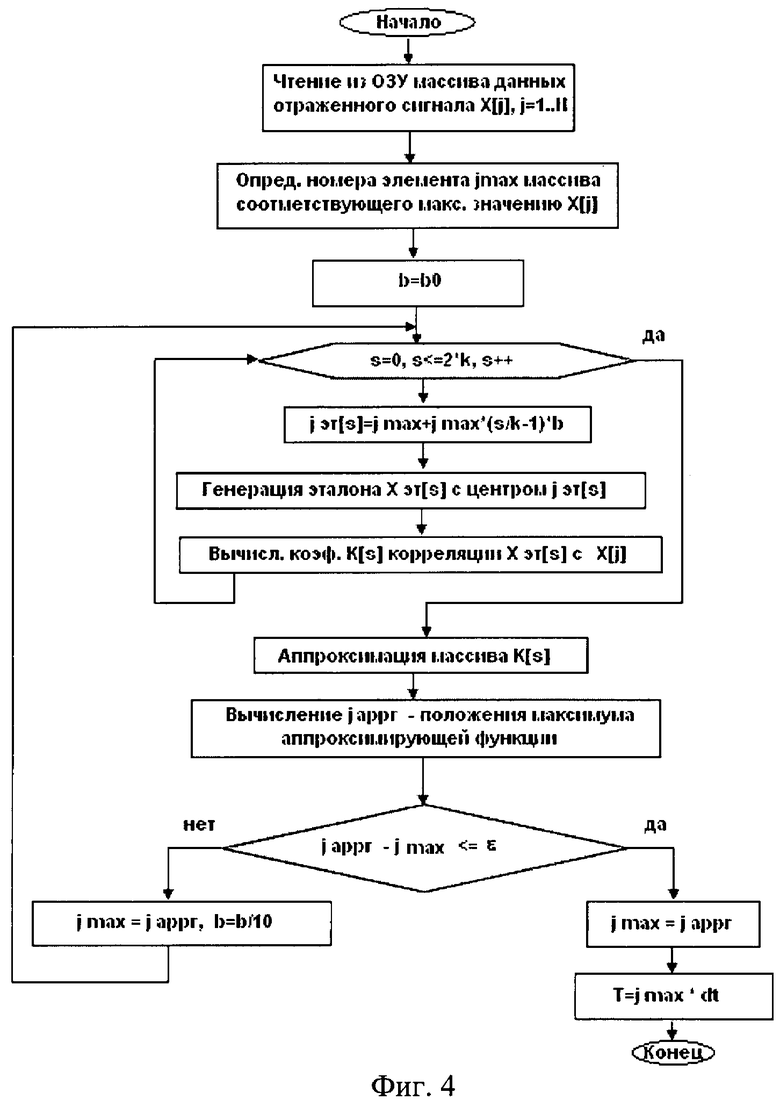
С момента запуска зондирующего сигнала начинают формирование генератором 1 синхроимпульсов СИ2, производят аналого-цифровое преобразование ожидаемого отраженного сигнала с помощью аналого-цифрового преобразователя 2 и запись результатов преобразования в оперативное запоминающее устройство 3. Далее вычислитель 5 производит чтение и обработку зарегистрированного и хранящегося в оперативном запоминающем устройстве 3 дискретизированного сигнала. Действия обработки выполняются в следующем порядке (Фиг.4):
1. Производят чтение зарегистрированного в оперативном запоминающем устройстве 3 отраженного сигнала, представленного в цифровой форме в виде набора дискретных отсчетов.
2. Определяют номер элемента jmax массива, которому соответствует максимальное значение сигнала. Этот номер jmax является грубой оценкой центра отраженного сигнала.
3. Создают 2k+1 эталонных сигналов, по форме соответствующих отраженному, центры эталонных сигналов смещают по отношению к отраженному на величину jmax*(s/k-1)*b, где s=0, 1, 2,…2k, b - постоянный коэффициент, задаваемый от 0 до 1 в зависимости от величины возможной ошибки грубой оценки, например, b=0.1, если возможная ошибка равна 10%, при этом k=3. Если возможна ошибка грубой оценки до 90%, то задают значение b=0.9, при этом k=25. Коэффициент b=0…1 определяет размер окрестности вблизи центра отраженного сигнала. В этой окрестности будут находиться центры эталонных сигналов.
4. Вычисляют коэффициенты корреляции эталонных сигналов с отраженным. Результат представляется в виде числового массива, содержащего 2k+1 элементов, каждому элементу соответствует число m=jmax+jmax*(s/k-1)*b и значение коэффициента корреляции КК(m).
5. Производят аппроксимацию зависимости коэффициентов корреляции эталонных сигналов с отраженным КК(m) от числа m, который определяет положение центров эталонных сигналов, m=jmax+jmax*(s/k-1)*b.
6. Производят передискретизацию на основе найденной аппроксимирующей зависимости F(m) для массива KK[m] с увеличением количества элементов массива в R раз, т.е. формируют массив KK1[m1], где m1=jmax+jmax*(s1/(k*R)-1)*b, s1=0, 1, 2,…2k*R, R - коэффициент передискретизации, например 10.
7. Определяют значение m1max массива KK1[m1], которому соответствует максимальное значение коэффициента корреляции КК1. Значение m1max принимают за уточненный центр отраженного сигнала.
8. Повторяют далее все предыдущие операции обработки сигнала, уменьшая каждый раз величину b, определяющую размер окрестности вблизи приближенного значения центра отраженного сигнала, в качестве приближенного значения центра отраженного сигнала выбирают значение m1max определенное в п.7. Повторение операций обработки прекращают после достижения требуемой точности приближения оценки положения центра отраженного сигнала, которую оценивают по величине разности между вычисленными значениями центров отраженного сигнала в результате текущего и предыдущего приближения.
9. Вычисляют значение временного интервала Т в единицах времени Т=m1max*dt, где m1max - уточненное значение центра отраженного сигнала dt - шаг дискретности по времени при измерении отраженного сигнала.
Способ обеспечивает увеличение точности измерения временного интервала между двумя радиоимпульсами в несколько раз за счет многократного повторения операций обработки сигнала с одновременным уменьшением размера окрестности вблизи приближенного значения центра анализируемого отраженного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ СИГНАЛА | 2011 |
|
RU2478213C2 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2451904C1 |
| Способ обеспечения высокой разрешающей способности радиолокатора по дальности за счет выбора оптимального параметра регуляризации инверсного фильтра | 2021 |
|
RU2756291C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2469269C2 |
| Способ адаптивного обеспечения высокой разрешающей способности радиолокатора по дальности за счет оценивания информационного диапазона параметра регуляризации инверсного фильтра | 2021 |
|
RU2785383C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2414721C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
Изобретение относится к измерительной технике. Достигаемый технический результат изобретения - повышение точности измерения временного интервала между радиоимпульсами. Указанный результат достигают тем, что способ измерения временных интервалов между моментом запуска зондирующего сигнала и центром отраженного сигнала включает прием отраженного сигнала с последующим аналого-цифровым преобразованием этого сигнала с момента времени запуска зондирующего сигнала, определение номера jmax элемента числового массива, соответствующего центру отраженного сигнала, создание в окрестности jmax 2к+1 эталонных сигналов, по форме соответствующих отраженному, центр каждого из которых смещают по отношению к центру отраженного сигнала с временным сдвигом jmax*(s/k-1)*b, где s=0, 1, 2,…2k, s - номер эталона, k - коэффициент, больший или равный 3, b - постоянный коэффициент от 0 до 1, определяющий размер окрестности вблизи центра отраженного сигнала. Вычисляют коэффициенты корреляции эталонных сигналов с отраженным, производят аппроксимацию зависимости коэффициентов корреляции 2k+1 эталонных сигналов с отраженным КК[m], m=jmax+jmax*(s/k-1)*b, производят передискретизацию на основе найденной аппроксимирующей зависимости для массива КК[m] с увеличением количества элементов массива в R раз, формируют массив KK1[m1], где m1=jmax+jmax*(s1/(k*R)-1)*b, s1(=0, 1, 2,…2k*R, R - коэффициент передискретизации больше 1. Определяют значение m1max массива KK1[m1], которому соответствует максимальное значение коэффициента корреляции КК1, значение m1max принимают за уточненный центр отраженного сигнала и далее повторяют операции обработки сигнала с одновременным уменьшением коэффициента b - размера окрестности вблизи уточненного значения центра анализируемого отраженного сигнала, после чего вычисляют значение временного интервала Т в единицах времени T=m1max*dt, где dt - шаг дискретности по времени при измерении отраженного сигнала. 4 ил.
Способ измерения временных интервалов между радиоимпульсами, включающий прием отраженного сигнала с момента запуска зондирующего сигнала и измерение временного интервала между моментом запуска зондирующего сигнала и центром отраженного сигнала, отличающийся тем, что производят аналого-цифровое преобразование отраженного сигнала с момента времени запуска зондирующего сигнала, определяют номер jmax элемента числового массива, которому соответствует максимальное значение сигнала, создают 2k+1 эталонных сигналов, по форме соответствующих отраженному, центр каждого смещают по отношению к центру отраженного сигнала на величину jmax·(s/k-1)·b, где s=0, 1, 2,…2k, s - номер эталона, k - коэффициент, больший или равный 3, b - постоянный коэффициент от 0 до 1, определяющий размер окрестности вблизи центра отраженного сигнала, вычисляют коэффициенты корреляции эталонных сигналов с отраженным, производят аппроксимацию зависимости коэффициентов корреляции 2k+1 эталонных сигналов с отраженным KK[m], m=jmax+jmax·(s/k-1)·b, производят передискретизацию на основе найденной аппроксимирующей зависимости для массива KK[m] с увеличением количества элементов массива в R раз, формируют массив KK1[m1], где m1=jmax+jmax·(s1/(k·R)-1)·b, S1=0, 1, 2,…2k·R, R - коэффициент передискретизации больше 1, определяют значение m1max массива KK1[m1], которому соответствует максимальное значение коэффициента корреляции KK1, значение m1max принимают за уточненный центр отраженного сигнала, далее повторяют операции обработки сигнала с одновременным уменьшением коэффициента b - размера окрестности вблизи уточненного значения центра анализируемого отраженного сигнала, после чего вычисляют значение временного интервала Т в единицах времени T=m1max·dt, где dt - шаг дискретности по времени при измерении отраженного сигнала.
| ФИНКЕЛЬШТЕЙН М.И | |||
| Основы радиолокации | |||
| - М.: Радио и связь, 1983, с.15, 16, 324 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 2006 |
|
RU2307384C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ВХОДНОГО СИГНАЛА ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2007 |
|
RU2344430C1 |
| RU 2010116919 A, 28.04.2010 | |||
| US 7185905 B2, 06.03.2007 | |||
| US 7499150 B2, 03.03.2009 | |||
| US 7616149 B2, 10.11.2009. | |||

