Изобретение относится к области управления летательными аппаратами и предназначено для снятия усилий с ручки летчика в режиме ручного управления и перемещения проводки управления в режиме автоматического управления.
Известен триммерный механизм МГУ-1 (см. Электромеханизм градиента усилий МГУ-1. Техническое описание и инструкция по эксплуатации. 8А4.030.118ТО. 1966 г., аналог), содержащий электродвигатель со встроенной электромагнитной муфтой торможения, обмотка которой включена последовательно с якорем, редуктор, электромагнитную муфту сцепления и центробежно-фрикционное демпфирующее устройство.
К недостаткам такого устройства относятся его сложность, отсутствие линейной зоны управления скоростью выходного вала, мал ресурс работы.
Указанный недостаток частично устранен в известном триммерном механизме МТП-1 (см. Механизм триммирования и перемещения МТП-1. Руководство по технической эксплуатации. МКВИ.798133.001 РЭ. 2005 г., прототип), содержащем бесконтактный моментный электродвигатель с датчиком положения вала электродвигателя и усилителем мощности, необратимый редуктор, электромагнитную муфту сцепления, центробежно-фрикционное демпфирующее устройство, фрикционно-пружинную муфту пересиливания.
Недостатком прототипа является его сложность.
Целью изобретения является упрощение конструкции триммерного механизма, снижение веса и габаритов.
Поставленная цель достигается тем, что в триммерном механизме, содержащем усилитель мощности, на первый вход которого поступает сигнал управления скоростью выходного вала триммерного механизма, бесконтактный моментный электродвигатель, обмотки управления которого соединены с выходом усилителя мощности, датчик положения вала электродвигателя, выходной сигнал которого соединен со вторым входом усилителя мощности, и редуктор, вал электродвигателя кинематически жестко соединен с электромагнитной тормозной муфтой, а через редуктор - с выходным валом триммерного механизма, причем на обмотку тормозной муфты поступает разовая команда на ее отключение.
Функциональная схема триммерного механизма приведена на чертеже.
Триммерный механизм содержит бесконтактный моментный электродвигатель 1, датчик положения вала электродвигателя 2, усилитель мощности 3, электромагнитную муфту торможения 4 и редуктор 5.
Предлагаемый триммерный механизм работает следующим образом. В режиме автоматического управления на обмотку тормозной муфты 4 поступает разовая команда «ОТКЛ» на ее отключение. При отключении тормозной муфты 4 освобождается вал электродвигателя 1. Сигнал управления скоростью выходного вала триммерного механизма поступает на первый вход усилителя мощности 3 и далее на обмотки управления электродвигателя 1. Вращаясь, электродвигатель 1 вращает непосредственно связанный с ним датчик положения вала 2, а через редуктор 5 - выходной вал триммерного механизма. Сигнал датчика положения 2 вала электродвигателя 1 поступает на второй вход усилителя мощности 3, обеспечивая коммутацию обмоток управления электродвигателя 1. При этом вал электродвигателя 1, а значит, и выходной вал триммерного механизма, вращается со скоростью, пропорциональной сигналу управления.
Режим автоматического управления триммерным механизмом выключается снятием сигнала управления скоростью выходного вала триммерного механизма и разовой команды «ОТКЛ» с обмотки электромагнитной муфты торможения 4. При этом выходной вал триммерного механизма останавливается и фиксируется включенной муфтой торможения 4, обеспечивая работу триммерного механизма в режиме ручного управления с загрузкой ручки летчика загрузочным механизмом в проводке управления.
Усилие на ручке летчика снимается при подаче разовой команды «ОТКЛ» с кнопки на ручке летчика. При этом тормозная муфта 4 выключается, растормаживая вал триммерного механизма. Под действием сжатой пружины загрузочного механизма выходной вал триммерного механизма поворачивается до установки загрузочного механизма в нейтральное положение, при котором усилие на ручке летчика снимается.
Величина демпфирования, исключающая «заброс» ручки летчика от загрузочного механизма, обеспечивается двумя способами:
- механическим с демпфированием по закону пропорционально ускорению выходного вала триммерного механизма, обусловленное моментом инерции подвижных частей кинематической цепи триммерного механизма;
- электромеханическим с демпфированием по закону пропорционально скорости выходного вала триммерного механизма, обусловленное наличием противоЭДС при закорачивании обмоток управления электродвигателя.
В случае заклинивания загрузочного механизма при отсутствии разовой команды «ОТКЛ» на растормаживание выходного вала триммерного механизма или повреждения системы питания обмотки тормозной муфты тормозная муфта начинает работать в режиме ограничителя предельных нагрузок триммерного механизма.
Таким образом, предлагаемая структура триммерного механизма позволяет исключить из его состава электромагнитную муфту сцепления, центробежно-фрикционное демпфирующее устройство и фрикционно-пружинную муфту пересиливания. Это упрощает конструкцию триммерного механизма, уменьшает вес и габариты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРИММЕРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2356792C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2016 |
|
RU2652284C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЗМОМ ТРИММЕРНОГО ЭФФЕКТА МАНЕВРЕННОГО САМОЛЕТА | 2018 |
|
RU2719610C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| БОКОВАЯ РУЧКА УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2571992C1 |
Изобретение относится к области управления летательными аппаратами и предназначено для снятия усилий с ручки управления летчика в режиме ручного управления и перемещения проводки управления в режиме автоматического управления. Устройство содержит усилитель мощности, бесконтактный моментный электродвигатель, датчик положения вала электродвигателя, редуктор и электромагнитную тормозную муфту. На первый вход усилителя мощности поступает сигнал управления скоростью выходного вала триммерного механизма, второй вход которого соединен с выходным сигналом датчика положения вала электродвигателя, а выход усилителя мощности соединен с обмотками управления электродвигателя. Вал электродвигателя кинематически жестко соединен с электромагнитной тормозной муфтой, а через редуктор - с выходным валом триммерного механизма. На обмотку тормозной муфты поступает разовая команда на ее отключение. Достигается упрощение конструкции, уменьшение веса и габаритов. 1 ил.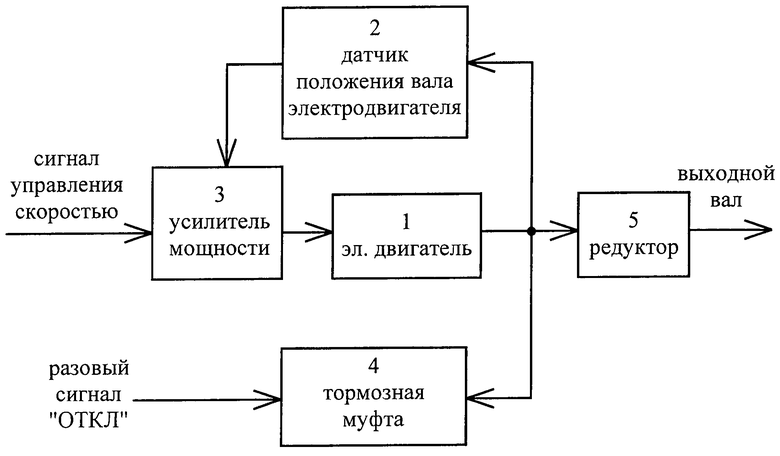
Триммерный механизм, выходной вал которого связан с ручкой управления летчика через загрузочный механизм, содержащий усилитель мощности, на первый вход которого поступает сигнал управления скоростью выходного вала триммерного механизма, бесконтактный моментный электродвигатель, обмотки управления которого соединены с выходом усилителя мощности, датчик положения вала электродвигателя, выходной сигнал которого соединен со вторым входом усилителя мощности, и редуктор, отличающийся тем, что, с целью упрощения конструкции триммерного механизма, вал электродвигателя кинематически жестко соединен с электромагнитной тормозной муфтой, а через редуктор - с выходным валом триммерного механизма, причем на обмотку тормозной муфты поступает разовая команда на ее отключение.
| ТРИММЕРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2356792C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОМЕХАНИЗМ УПРАВЛЕНИЯ АГРЕГАТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2018460C1 |
| ПРИВОДНОЙ ЭЛЕКТРОМЕХАНИЗМ | 2003 |
|
RU2277195C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |

