Изобретение относится к области систем управления летательными аппаратами и предназначено для создания и снятия усилий с ручки летчика в режиме ручного управления объектом, а также для дистанционного управления в режиме автоматического триммирования.
Известен триммерный механизм (см. Электромеханизм градиента усилий МГУ-1. Техническое описание и инструкция по эксплуатации. 8А4.030.118 ТО. 1966 г., аналог), содержащий электродвигатель, редуктор, электромагнитную муфту сцепления и центробежно-фрикционное демпфирующее устройство, уменьшающее скорость снятия усилий с ручки управления летчика.
К недостаткам такого устройства относятся его сложность, а также необходимость наличия вне триммерного механизма загрузочной пружины для создания усилия на ручке управления летчика и устройства измерения деформации пружины для формирования сигнала «вмешательство летчика в управление».
Указанный недостаток частично устранен в известном триммерном механизме (см. Автомат усилий и триммерная рулевая машинка. L 109 ВОМ SFENA. Руководство по эксплуатации. 1986 г., прототип), в состав которого входит: загрузочная пружина для создания усилия на ручке летчика с устройством измерения деформации пружины для формирования сигнала «вмешательство летчика в управление», электродвигатель, редуктор, электромагнитная муфта сцепления, электромагнитное демпфирующее устройство.
Недостатком прототипа является его сложность.
Целью изобретения является упрощение конструкции триммерного механизма, снижение веса и габаритов.
Поставленная цель достигается тем, что в триммерном механизме, содержащем электродвигатель и редуктор, выходной вал которого жестко связан с ручкой летчика, в качестве загрузочного устройства используется электродвигатель, кинематически связанный через редуктор с выходным валом триммерного механизма и датчиком положения выходного вала, сигнал которого поступает на первый вход усилителя-сумматора, второй вход усилителя-сумматора соединен с выходом интегратора, вход которого соединен через нормально разомкнутые контакты кнопки «триммирование» на ручке летчика с выходом усилителя-сумматора, соединенного с обмоткой управления электродвигателя, а третий вход усилителя-сумматора соединен с сигналом автоматического дистанционного управления триммированием.
То есть триммерный механизм представляет собой следящую систему, замкнутую по положению с помощью датчика положения выходного вала.
При этом в качестве электродвигателя следящей системы используется моментный электродвигатель.
Функциональная схема триммерного механизма приведена на чертеже.
Триммерный механизм содержит электродвигатель 1, кинематически связанный через редуктор 2 с выходным валом триммерного механизма, датчик положения выходного вала 3, усилитель-сумматор 4 и интегратор 5.
Предлагаемый триммерный механизм работает следующим образом.
В режиме дистанционного автоматического триммирования сигнал управления поступает на третий вход усилителя-сумматора 4 и далее на обмотку управления электродвигателя 1. Вращаясь, электродвигатель 1 вращает через редуктор 2 выходной вал триммерного механизма. Сигнал датчика положения выходного вала 3, поступающий на первый вход усилителя-сумматора 4 с противоположным знаком, компенсирует входной сигнал дистанционного управления, обеспечивая поворот выходного вала триммерного механизма в заданное сигналом дистанционного управления положение.
Таким образом в режиме дистанционного триммирования триммерный механизм работает как следящая система, замкнутая датчиком положения выходного вала.
При вмешательстве летчика в управление объектом, то есть при перемещении ручки управления летчика и повороте выходного вала триммерного механизма, следящий режим автоматического триммирования нарушается. На выходе усилителя-сумматора 4 появляется сигнал рассогласования между сигналом управления автоматического триммирования и сигналом датчика положения выходного вала 3 триммерного механизма.
Этот сигнал рассогласования и является сигналом «вмешательство летчика в управление». Он поступает в систему автоматического управления и выключает режим дистанционного автоматического триммирования, обеспечивая переход в режим ручного управления.
В режиме ручного управления при перемещении ручки управления летчика поворачивается выходной вал триммерного механизма. При этом сигнал с датчика положения выходного вала 3 поступает через усилитель-сумматор 4 на обмотку управления электродвигателя 1, вызывая появление момента вращения на его оси. Вращающий момент электродвигателя 1 через редуктор 2 загружает ручку управления летчика противодействующим моментом. Величина момента определяется величиной сигнала датчика положения выходного вала 3, то есть величиной перемещения ручки управления летчика.
Таким образом, в режиме ручного управления объектом замкнутая по положению выходного вала следящая система триммерного механизма работает как электрическая пружина, создавая усилие на ручке летчика.
Усилие на ручке управления летчика снимается при нажатии кнопки 6 «триммирование» на ручке управления летчика. При этом выходной сигнал усилителя-сумматора 4 через замкнутые контакты кнопки 6 поступает на вход интегратора 5, выходной сигнал которого поступает на второй вход усилителя-сумматора 4 с противоположным знаком. При этом обнуляется выходной сигнал усилителя-сумматора 4, следовательно, и противодействующий момент на ручке управления летчика.
Требуемая скорость снятия усилия с ручки летчика определяется постоянной времени интегратора 5.
Описанные выше штатные режимы работы триммерного механизма функционируют при наличии бортового питания триммерного механизма. При аварийном отключении питания обмотки управления электродвигателя 1 закорачиваются. Тогда при ручном управлении, то есть при повороте выходного вала триммерного механизма от ручки управления летчика, редуктор 2 работает как мультипликатор, увеличивая скорость вращения якоря двигателя 1. Электродвигатель 1, работая в генераторном режиме, создает противодействующий момент динамической загрузки ручки летчика.
Таким образом, предлагаемая структура триммерного механизма позволяет исключить из состава триммерного механизма загрузочную пружину с устройством формирования сигнала «вмешательство летчика в управление», электромагнитную муфту сцепления и демпфирующее устройство. Это упрощает конструкцию триммерного механизма, уменьшает вес и габариты, повышает срок службы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРИММЕРНЫЙ МЕХАНИЗМ | 2011 |
|
RU2457981C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2016 |
|
RU2652284C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЗМОМ ТРИММЕРНОГО ЭФФЕКТА МАНЕВРЕННОГО САМОЛЕТА | 2018 |
|
RU2719610C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ УЧЕБНО-ТРЕНИРОВОЧНОГО САМОЛЕТА | 1993 |
|
RU2093419C1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
Изобретение относится к области систем управления летательными аппаратами и предназначено для создания и снятия усилий с ручки летчика в режиме ручного управления объектом, а также для дистанционного управления в режиме автоматического триммирования. Устройство содержит электродвигатель и редуктор, датчик положения выходного вала, усилитель-сумматор и интегратор. Электродвигатель кинематически связан через редуктор с выходным валом триммерного механизма и датчиком положения выходного вала, сигнал которого соединен с первым входом усилителя-сумматора. Второй вход усилителя-сумматора соединен с выходом интегратора, вход которого соединен через нормально разомкнутые контакты кнопки на ручке летчика с выходом усилителя-сумматора, соединенного с обмоткой управления электродвигателя. Третий вход усилителя-сумматора соединен с сигналом дистанционного управления триммированием. Технический результат заключается в упрощении конструкции, уменьшении веса и габаритов. 2 з.п. ф-лы, 1 ил.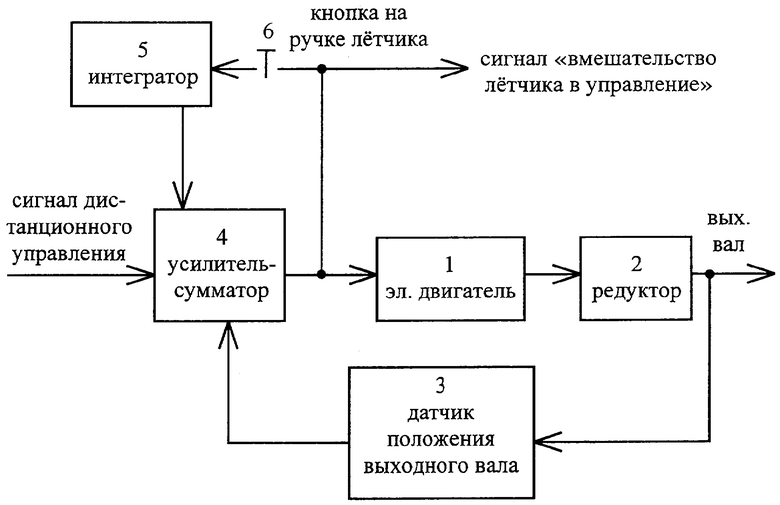
1. Триммерный механизм, выходной вал которого жестко связан с ручкой управления летчика, содержащий электродвигатель и редуктор, отличающийся тем, что, с целью упрощения конструкции триммерного механизма, в качестве загрузочного устройства ручки управления летчика используется электродвигатель, кинематически связанный через редуктор с выходным валом триммерного механизма и датчиком положения выходного вала, сигнал которого соединен с первым входом усилителя-сумматора, второй вход усилителя-сумматора соединен с выходом интегратора, вход которого соединен через нормально разомкнутые контакты кнопки на ручке летчика с выходом усилителя-сумматора, соединенного с обмоткой управления электродвигателя, а третий вход усилителя-сумматора соединен с сигналом дистанционного управления триммированием.
2. Триммерный механизм по п.1, отличающийся, тем, что в качестве электродвигателя использован моментный электродвигатель.
3. Триммерный механизм по п.1, отличающийся, тем, что при аварийном отсутствии электропитания триммерного механизма обмотки управления электродвигателя закорачиваются.
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2263352C1 |
| SU 1517266 A1, 10.11.2004 | |||
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2231127C1 |
| Втброплатформа | 1975 |
|
SU583044A1 |

