Устройство относится к средствам контроля геометрических параметров макродефектов внутренней поверхности труб, например, нефтяного сортамента.
Известно устройство для контроля качества поверхности цилиндрических отверстий, содержащее цилиндрический корпус, в котором на подшипниках установлена направляющая труба, в которой укреплен световод, имеющий выходной конец, перпендикулярный оси направляющей трубы. При этом в цилиндрическом корпусе посредством резьбового соединения установлен центрирующий конус, на котором с зазором укреплен стакан, подпружиненный пружиной. Направляющая труба посредством зубчатых шестерен соединена с электродвигателем, укрепленным на державке, имеющей две группы контактов (А.с. №1221492, SU, МКИ4 G01B 21/30, опубл. 30.03.1986. Бюл. №12).
Недостатком известного устройства является невозможность контроля геометрических параметров макродефектов (забоин, задиров, коррозионных раковин) поверхности отверстий, на показания устройства влияет цветность контролируемой поверхности.
Известно устройство для контроля микрорельефа поверхностей, содержащее стойку, измерительную головку с механизмом ориентации, выполненную в виде волоконно-оптического преобразователя со световодом в виде коллектора. При этом в устройстве выполняют механизм ориентации в виде подвески с двумя колесами, расположенными одно от другого на расстоянии, превышающем диаметр внешнего световода коллектора преобразователя, двуплечий рычаг, установленный шарнирно на стойке с возможностью качания в плоскости оси симметрии стойки и соединенный одним плечом посредством упругой связи со стойкой, а другое плечо шарнирно закреплено на подвеске. Измерительная головка укреплена между осями вращения колес, а шарнир, соединяющий подвеску и плечо рычага, смещен относительно линии центров колес (А.с. 1528079, SU, МКИ4 G01B 5/28, опубл. 29.03.1988).
Недостатком известного устройства является невозможность контроля геометрических параметров макродефеков (забоин, задиров, коррозионных раковин) поверхности отверстий, на показания устройства влияет цветность контролируемой поверхности.
Наиболее близким по своей технической сущности является устройство для контроля шероховатости поверхности отверстий, содержащее направляющую трубу с зубчатой рейкой, установленной в корпусе с возможностью осевого перемещения и соединенной через шестерню, червячное колесо и червяк с электродвигателем. При этом осевое движение направляющей трубы ограничивают концевые выключатели, а в направляющей трубе размещен волокнно-оптический световод, представляющий из себя цилиндрический коллектор и работающий как датчик шероховатости (А.с. №1594350, SU, МКИ5 G01B 11/30, опубл. 23.09.1990).
Недостатком известного устройства также является невозможность контроля геометрических параметров макродефектов (забоин, задиров, коррозионных раковин) поверхности отверстий, на показания устройства влияет цветность контролируемой поверхности.
В основу изобретения поставлена задача определения геометрических параметров макродефектов на поверхности труб, имеющих различную цветность.
Задача решается за счет того, что устройство контроля макродефектов на внутренней поверхности труб, содержащее излучатель, приемник излучения, цилиндрический корпус направляющую трубу, механически связанную с электроприводом и установленную вдоль оси корпуса, концевой выключатель, блок управления, блок питания, связанный через блок управления с концевым выключателем, согласно изобретению на внутренней поверхности цилиндрического корпуса выполнены симметричные пазы, в каждый из которых установлены четыре пары направляющих ролика с шагом в 90°, ось каждого ролика жестко связана с кронштейном, имеющим возможность перемещения вдоль нормали к поверхности цилиндрического корпуса, при этом каждый кронштейн подпружинен относительно цилиндрического корпуса, другой конец пружины опирается на датчик давления, направляющая труба установлена с помощью подшипников в цилиндрическом корпусе с возможностью вращательного движения, направляющая труба и цилиндрический корпус связаны между собой зубчатой парой, одно из колес которой связано с электроприводом, на одной оси с корпусом установлен с возможностью осевого перемещения шток, опирающийся на пружину, второй конец пружины опирается на датчик давления, установленный на фланце цилиндрического корпуса, при этом на части штока, находящейся вне внутренности цилиндрического корпуса, концевой выключатель установлен на штоке вне корпуса и касается торца контролируемой трубы, на торце направляющей трубы укреплен излучатель, перед излучателем размещена мембрана, в которой выполнены параллельные щели, имеющая угол наклона в сторону приемника излучения, в направляющей трубе выполнено окно между мембраной и приемником излучения.
Кроме того, все датчики давления, концевой выключатель, блок питания подключены к блоку управления, подсоединенному к электроприводу.
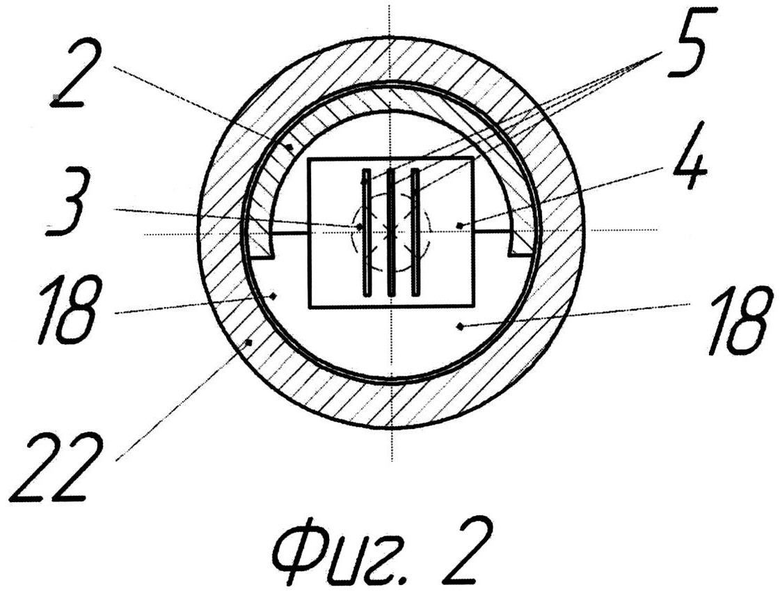
На фиг.1 изображены фронтальное сечение трубы и фронтальный вид кинематической схемы устройства контроля макродефектов на внутренней поверхности труб;
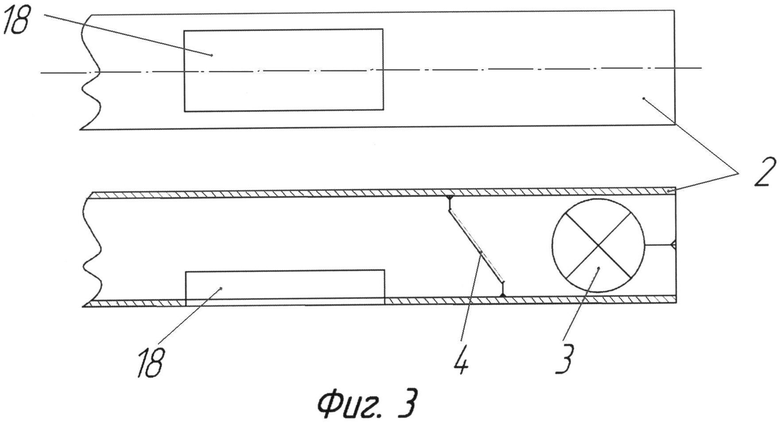
на фиг.2 изображено сечение А-А;
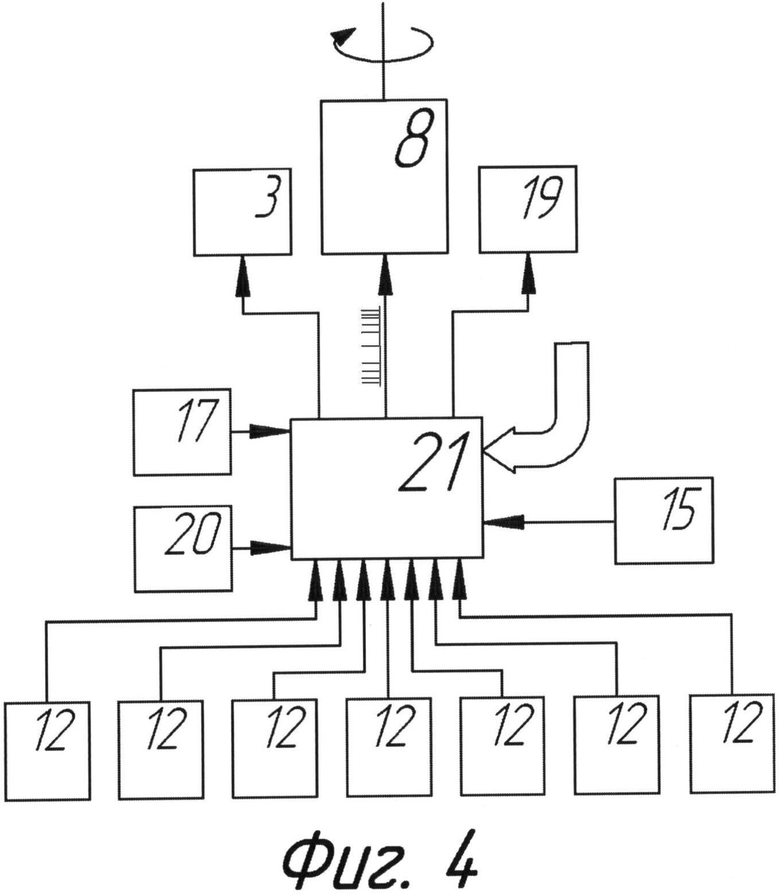
на фиг.3 показан фронтальный вид направляющей трубы с окном и сечение фронтального вида направляющей трубы с окном;
на фиг.4 изображена блок-схема системы управления работы устройством.
Устройство контроля макродефектов на внутренней поверхности труб содержит цилиндрический корпус 1, соосно установлена направляющая труба 2 с укрепленным на торце излучателем 3. Перед излучателем закреплена мембрана 4 с несколькими параллельными щелями 5. Направляющая труба 2 установлена с возможностью вращения посредством пары подшипников 6 и связана с корпусом 1 при помощи зубчатой пары 7, подсоединенной к электроприводу 8. На внутренней поверхности цилиндрического корпуса 1 выполнены симметричные пазы, в каждый из которых установлены четыре пары направляющих ролика 9 с шагом в 90°, ось каждого ролика 9 жестко связана с кронштейнами 10, имеющими возможность перемещения вдоль нормали к поверхности цилиндрического корпуса 1. Каждый кронштейн 10 опирается на пружину 11. Один из торцов пружины 11 опирается на датчик давления 12. На одной оси с корпусом 1 установлен с возможностью осевого перемещения шток 13, опирающийся на пружину 14, второй конец пружины опирается на датчик давления 15, установленный на фланце 16 цилиндрического корпуса 1. На части штока 13, находящейся вне цилиндрического корпуса, установлен концевой выключатель 17.
В направляющей трубе 2 выполнено окно 18, расположенное между мембраной 4 и приемником излучения 19.
Все датчики давления 12, концевой выключатель 17, блок питания 20 подключены к блоку управления 21, подсоединенному к электроприводу 8. Контролируемая труба 22.
Устройство работает следующим образом. Оператор (на чертеже не показан) устанавливает направляющую трубу 2 в отверстие контролируемой трубы 22 и вводит направляющую трубу 2 и цилиндрический корпус 1 во внутренность трубы 22 до касания всеми роликами 9 поверхности отверстия, в результате чего происходит центрирование направляющей трубы 2 и цилиндрического корпуса 1 относительно оси симметрии трубы 22.
После касания всеми роликами 9 поверхности отверстия трубы 22 начинают работать приемник излучения 19 и излучатель 3, питаемые по команде блока управления 21 блоком питания 20. Световой поток, сформированный излучателем 3, падает на мембрану 4 и через щели 5 попадает через окно 18, выполненное на образующей направляющей трубы 2, на контролируемую поверхность отверстия трубы 22 в виде непересекающихся световых отрезков. Такое освещение контролируемой поверхности является структурированным освещением (http://www.aqsense.com/docs/docu/structuredLight.html http://www.gdiy.com/projects/structured-light-3d-scanning/index.php?lang=ru). Световой поток в виде световых отрезков падает на контролируемую поверхность трубы 22 через окно 18 благодаря наклону мембраны 4 по отношению к оси симметрии направляющей трубы 2. Поверхность отверстия трубы 22 может иметь дефекты. Световые отрезки, падающие на эти дефекты, изменяют свою форму, т.е. на каких-то своих фрагментах они теряют свою прямолинейность.
Угол наклона мембраны 4 относительно оси симметрии цилиндрического корпуса 1 выбирается таким образом, чтобы сформированный световой поток щелями 5 и излучателем 3 падал через окно 18 направляющей трубы 2 на контролируемую поверхность отверстия трубы 22. При этом размеры окна 18 таковы, что отраженный от поверхности отверстия трубы 22 световой поток через окно 18 попадает на приемник излучения 19.
Оптическая ось приемника излучения 19 должна быть сосной оси симметрии цилиндрического корпуса 1. При этом приемник излучения 19 воспринимает все изменения прямолинейности световых отрезков на поверхности отверстия трубы 22. Все изображения, зафиксированные приемником излучения 19, анализируются с помощью компьютера (на фиг. не показан), например, по методикам в соответствии с работами (Система регистрации железнодорожных составов цистерн / Волотовский С.Г., Казанский Н.Л. Попов С.Б. // Свидетельство об официальной регистрации программ для ЭВМ №2004611969 по заявке №2004611381 от 29 июня 2004 г. Зарегистрировано в Реестре программ для ЭВМ 26 августа 2004 г.; Казанский, Н.Л. Система технического зрения для определения количества гель-частиц в растворе полимера / Н.Л. Казанский, С.Б. Попов // Компьютерная оптика. - 2009. - Том 33, №3. - С.325-331). В результате такого анализа могут быть определены максимальная глубина дефекта, его наибольшие ширина и протяженность. Структурированное освещение не зависит от цвета контролируемой поверхности, поэтому структурированное освещение для контроля геометрических параметров поверхности отверстия может быть использовано для контроля труб различного назначения. Чем больше световых отрезков, сформированных мембраной 4, щелями 5 и излучателем 3, тем большая площадь может контролироваться одномоментно. Чем тоньше световые отрезки и чем меньше между ними расстояние, тем более точным будет контроль геометрических размеров макродефектов на поверхности отверстия трубы 22.
Момент касания всеми роликами 9 поверхности отверстия трубы 22 фиксируется датчиками давления 12. После касания всеми роликами 9 поверхности отверстия трубы 22 начинают анализироваться показания датчика давления 15, показания которого характеризуют скорость продвижения во внутренность трубы 22 цилиндрического корпуса 1 и направляющей трубы 2. Скорость продвижения во внутренность контролируемой трубы 22 цилиндрического корпуса 1 и направляющей трубы 2 обеспечивает оператор (на чертеже не показан), воздействующий на шток 13, который в свою очередь сжимает пружину 14, давящую одним своим торцом на датчик давления 15, опирающийся на фланец 16 цилиндрического корпуса 1.
Чем больше скорость продвижения цилиндрического корпуса 1 и направляющей трубы 2 во внутренность отверстия трубы 22, тем большее давление оказывает пружина 14 на датчик давления 15 и тем большая по команде блока управления 21 имеет место частота вращения электропривода 8, который через зубчатую пару 7 и подшипники 6 приводит во вращение направляющую трубу 2. Это приводит к тому, что световые отрезки, сформированные излучателем 3 и щелями 5 мембраны 4, начинают сканирующее вращение по поверхности отверстия трубы 22. При этом световые отрезки совершают также прямолинейное движение вдоль оси симметрии трубы 22 под действием штока 13. Протяженность световых отрезков регламентируется протяженностью (длиной) окна 18, выполненного на образующей направляющей трубы 2.
Четыре пары роликов 9 необходимы для центрирования осей симметрии цилиндрического корпуса 1 и направляющей трубы 2 в отверстии трубы 22.
Для оператора (на фиг. не показан) срабатывание концевого выключателя 17 означает, что достигнута заданная протяженность контролируемого фрагмента поверхности отверстия трубы 22 и что устройство необходимо начать извлекать из внутренности трубы 22. При этом блоком управления 21 отключается работа датчиков давления 12 и 15, приемник излучения 19, излучатель 3. Блок управления 21 поворачивает ротор электропривода 8 в положение, соответствующее началу контроля трубы 22.
Положение концевого выключателя 17 на штоке 13 определяет протяженность фрагмента поверхности отверстия трубы 22, подлежащего контролю.
Протяженность направляющей трубы 2 и цилиндрического корпуса 1, а также ширина и длина окна 18, обуславливающие плотность и протяженность световых отрезков на поверхности трубы 22, заносятся оператором в блоке управления 21, который формирует такой частотный режим работы электропривода 8, что при внесении устройства во внутренность отверстия трубы 22 направляющая труба 2 повернется на такой угол, что за время контроля на фрагменте контролируемой поверхности не будет зон, которые бы не были освещены световыми отрезками, сформированными щелями 5 мембраны 4.
Угол поворота направляющей трубы 2 относительно цилиндрического корпуса 1 и трубы 22 ограничен электропроводами, питающими излучатель 3. Кроме того, окно 18 имеет определенную ширину и длину, ограничивающие зону сканирования. По этой причине величина угла поворота направляющей трубы 2 в момент окончания контроля поверхности отверстия трубы 22 должна составлять 360°+Δ, где величина Δ определяется шириной окна 18.
Количество щелей 5 мембраны 4 обусловлено характером проводимого контроля. В случае если необходимо проконтролировать только глубину раковины (забоины, риски и т.д.) на поверхности отверстия трубы 22, то тогда необходима по крайней мере одна щель 5 на мембране 4. Когда необходимо осуществить контроль глубины и протяженности, например, раковины, то минимальное количество щелей 5 должно быть две. Для контроля глубины, ширины и протяженности, например, раковины потребуется минимум три щели 5. Чем больше щелей 5 на мембране 4, тем более точный и достоверный контроль геометрических параметров поверхностного дефекта отверстия трубы 22.
Для того чтобы исключить влияние люфта на время начала сжатия датчика давления 15, пружина 14 перед началом работы должна иметь первичный натяг (сжатие).
В качестве датчиков давления 12 и 15 могут быть использованы, например, пьезокерамические датчики ЦТС-19 (http://www.elpapiezo.ru/elements.shtml).
В качестве электропривода 8 используется шаговый двигатель, например, модели 28BYJ-48 5 В (http://devicter.ru/goods/28BYJ-48-High-qualitv-Stepper-motor-5V?from=ZTE5) или ШД-10/100М (http://energo20.ru/article-0-72-435.html).
В качестве излучателя 3 может использоваться инфракрасный источник света. В этом случае исключаются помехи в виде засветок приемника излучения 19, что повышает достоверность результатов контроля поверхности отверстия трубы 22.
Блок управления 21 есть программируемый контроллер или микропроцессор.
Соосность оптической оси приемника излучения 19 необходима для того, чтобы исключить детерминированное искажение отраженного излучения от контролируемой поверхности отверстия трубы 22, обусловленное несоосностью цилиндрического корпуса 1 и приемника излучения 19. Соосность в этом случае повышает достоверность результатов контроля поверхности отверстия трубы 22. В качестве приемника излучения 19 использовалась телекамера повышенной резкости изображения модели MINI-BULET550TVL (http://www.radcam.ru/index.php?productID=514), модели JK-927 (http://www.radcam.ru/index.php?productID=438) или модели 900-СВ (http://www.radcam.ru/index.php?productID=589).
Заявляемое устройство было реализовано и испытано на трубе насос-компрессорной (НКТ 73 ГОСТ 633-80), имеющей внутренний диаметр отверстия 62 мм. Контроль осуществлялся на поверхности отверстия, прилегающей к торцу трубы, имеющей протяженность 300 мм. Испытания показали высокую достоверность результатов контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАЛЫХ НЕМАГНИТНЫХ ВКЛЮЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2458337C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ С РЕЗЬБОВОЙ ПОВЕРХНОСТЬЮ | 2008 |
|
RU2386925C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ РЕЗЬБЫ ТРУБНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2342632C2 |
| Способ контроля параметров лазерного канала управления прицельных комплексов и устройство диагностики для его осуществления | 2023 |
|
RU2824220C1 |
| СПОСОБ БЕСКОНТАКТНОГО ДИНАМИЧЕСКОГО КОНТРОЛЯ ИЗНОСА КОЛЕС ПОДВИЖНОГО СОСТАВА | 1998 |
|
RU2147729C1 |
| Мобильное устройство для определения параметров векторных приемников | 2020 |
|
RU2742870C1 |
| СЕЙСМИЧЕСКИЙ ИЗЛУЧАТЕЛЬ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2161810C1 |
| Устройство для доставки приборов контроля | 1987 |
|
SU1499567A1 |
| Устройство для транспортирования и подключения электроэлементов к измерительной аппаратуре | 1973 |
|
SU498230A1 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ РЕАКЦИОННОГО ПРОСТРАНСТВА ВЫСОКОТЕМПЕРАТУРНОГО РЕАКТОРА | 2007 |
|
RU2353879C2 |
Устройство относится к средствам контроля геометрических параметров макродефектов внутренней поверхности труб, например, нефтяного сортамента. Заявленное устройство контроля макродефектов на внутренней поверхности труб содержит излучатель, приемник излучения, цилиндрический корпус направляющую трубу, механически связанную с электроприводом и установленную вдоль оси корпуса, концевой выключатель, блок управления, блок питания, связанный через блок управления с концевым выключателем, при этом на внутренней поверхности цилиндрического корпуса выполнены симметричные пазы, в каждый из которых установлены четыре пары направляющих роликов с шагом в 90°, ось каждого ролика жестко связана с кронштейном, имеющим возможность перемещения вдоль нормали к поверхности цилиндрического корпуса, при этом каждый кронштейн подпружинен относительно цилиндрического корпуса, другой конец пружины опирается на датчик давления, направляющая труба установлена с помощью подшипников в цилиндрическом корпусе с возможностью вращательного движения, направляющая труба и цилиндрический корпус связаны между собой зубчатой парой, одно из колес которой связано с электроприводом, на одной оси с корпусом установлен с возможностью осевого перемещения шток, опирающийся на пружину, второй конец пружины опирается на датчик давления установленный на фланце цилиндрического корпуса, при этом на части штока, находящейся вне внутренности цилиндрического корпуса, концевой выключатель установлен на штоке вне корпуса и касается торца контролируемой трубы, на торце направляющей трубы укреплен излучатель, перед излучателем размещена мембрана, в которой выполнены параллельные щели, имеющая угол наклона в сторону приемника излучения, в направляющей трубе выполнено окно между мембраной и приемником излучения. Технический результат заключается в определении геометрических параметров макродефектов на поверхности труб, имеющих различную цветность при обеспечении высокой достоверности результатов контроля. 1 з.п. ф-лы, 4 ил.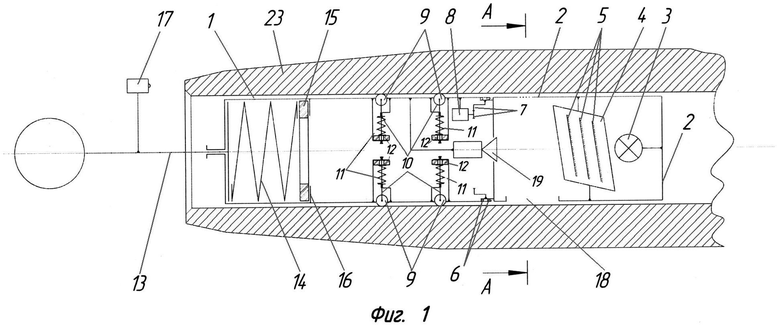
1. Устройство контроля макродефектов на внутренней поверхности труб, содержащее излучатель, приемник излучения, цилиндрический корпус, направляющую трубу, механически связанную с электроприводом и установленную вдоль оси корпуса, концевой выключатель, блок управления, блок питания, связанный через блок управления с концевым выключателем, отличающееся тем, что на внутренней поверхности цилиндрического корпуса выполнены симметричные пазы, в каждый из которых установлены четыре пары направляющих роликов с шагом в 90°, ось каждого ролика жестко связана с кронштейном, имеющим возможность перемещения вдоль нормали к поверхности цилиндрического корпуса, при этом каждый кронштейн подпружинен относительно цилиндрического корпуса, другой конец пружины опирается на датчик давления, направляющая труба установлена с помощью подшипников в цилиндрическом корпусе с возможностью вращательного движения, направляющая труба и цилиндрический корпус связаны между собой зубчатой парой, одно из колес которой связано с электроприводом, на одной оси с корпусом установлен с возможностью осевого перемещения шток, опирающийся на пружину, второй конец пружины опирается на датчик давления, установленный на фланце цилиндрического корпуса, при этом на части штока, находящейся вне внутренности цилиндрического корпуса, концевой выключатель установлен на штоке вне корпуса и касается торца контролируемой трубы, на торце направляющей трубы укреплен излучатель, перед излучателем размещена мембрана, в которой выполнены параллельные щели, имеющая угол наклона в сторону приемника излучения, в направляющей трубе выполнено окно между мембраной и приемником излучения.
2. Устройство контроля макродефектов на внутренней поверхности труб по п.1, отличающееся тем, что все датчики давления, концевой выключатель, блок питания подключены к блоку управления, подсоединенному к электроприводу.
| Устройство для контроля шероховатости поверхности отверстий | 1988 |
|
SU1594350A1 |
| US 6614923 B1 02.09.2003 | |||
| SU 1528079 A1 10.07.2004 | |||
| Устройство для контроля качества поверхности цилиндрических отверстий | 1984 |
|
SU1221492A1 |

