Изобретение относится к гидроакустической технике и может быть использовано в гидролокаторах кругового обзора, в системах позиционирования судна по донным маякам, в рубежных гидроакустических системах обнаружения боевых пловцов и др.
Сферические антенны используются в гидролокаторах кругового обзора в тех случаях, когда необходимо обеспечить возможность сканирования трехмерного подводного пространства в максимально широком диапазоне телесных углов. Конструктивно сферические антенны для гидролокаторов представляют собой корпус, имеющий сферическую либо приближенно сферическую форму, с размещенными на поверхности корпуса электроакустическими преобразователями. В результате сферическая антенна позволяет формировать характеристики направленности по любому направлению трехмерного пространства с качественными показателями (такими, как ширина характеристик направленности и уровень бокового поля), определяемыми конкретным способом размещения преобразователей на поверхности сферического корпуса [1].
Известна конструкция гидроакустической антенны со сферическим корпусом, имеющая сферический корпус, покрытый пластинами, на котором расположены гидрофоны [2]. Пластины имеют форму равнобедренных трапеций и расположены в полосах, параллельных экватору сферического корпуса антенны. Антенна крепится к корпусу судна и имеет технологический вырез, предназначенный для постановки устройства крепления и лишенный преобразователей. Также лишена преобразователей часть сферического корпуса, диаметрально противоположная технологическому вырезу. Конструкция указанной антенны технологична, причем способ размещения преобразователей позволяет разместить на поверхности сферического корпуса произвольное количество преобразователей. Однако антенна имеет и ряд существенных недостатков. В первую очередь к ним относится высокий уровень бокового поля и неравномерность характеристик направленности в плоскостях, перпендикулярных экватору сферического корпуса антенны. Такая особенность акустического поля антенны вызвана регулярностью расположения преобразователей вдоль только одного выделенного направления, а именно вдоль параллельных экватору полос. Также антенна не может обеспечить сканирование трехмерного пространства в полном диапазоне телесных углов, вследствие отсутствия преобразователей в части сферического корпуса, противоположной технологическому вырезу.
Известна гидроакустическая сферическая многоканальная антенна гидролокатора кругового обзора, совпадающая с предлагаемой по наибольшему числу общих признаков [3]. В данной антенне пьезоэлектрические преобразователи располагаются непосредственно на сферическом корпусе в узлах регулярной решетки, построенной на основе одного из платоновых тел, а именно додекаэдра. Звуковое поле антенны-прототипа более равномерно по различным направлениям трехмерного пространства и характеризуется меньшим уровнем бокового поля по сравнению с предыдущим аналогом. Тем не менее предлагаемое в патенте [2] размещение преобразователей также не является оптимальным. Известно, что при использовании додекаэдрических решеток преобразователи вблизи некоторых узловых точек располагаются более плотно по отношению к остальной части сферического корпуса, что приводит к повышенной концентрации звукового поля антенны в направлениях, соответствующих этим узловым точкам.
Другим недостатком антенны-прототипа является то, что на ее поверхности может быть размещено количество преобразователей, строго определяемое той платоновой фигурой, которая вписывается в сферу, что существенно ограничивает возможности проектирования антенны сферической формы.
Задача изобретения состоит в том, чтобы создать гидроакустическую антенну сферической формы для гидролокатора, обладающую равномерным звуковым полем по всем направлениям трехмерного пространства и малым уровнем бокового поля.
Техническим результатом от использования изобретения является улучшение характеристик звукового поля заявленной антенны, а также повышение вариабельности этапа проектирования антенны.
Для достижения указанного технического результата в гидроакустическую антенну сферической формы для гидролокатора, содержащую имеющий круглое отверстие для крепления к носителю гидролокатора сферический корпус, на котором установлены пьезоэлектрические преобразователи, введены новые признаки, а именно: пьезоэлектрические преобразователи установлены на сферическом корпусе по спирали, закрученной по часовой стрелке и начинающейся от точки А пересечения осью, проходящей через центр круглого отверстия и центр сферического корпуса, его наружной поверхности, при этом первый по порядку пьезоэлектрический преобразователь расположен вблизи точки А, а остальные - имеют координаты ρk=[θk, φk, R] в системе сферических координат с центром в центре сферического корпуса, где k=2…N порядковый номер пьезоэлектрического преобразователя, N - число пьезоэлектрических преобразователей,  (рад) - угол места k-го пьезоэлектрического преобразователя,
(рад) - угол места k-го пьезоэлектрического преобразователя,  - азимутальный угол k-го пьезоэлектрического преобразователя, R - радиус сферического корпуса.
- азимутальный угол k-го пьезоэлектрического преобразователя, R - радиус сферического корпуса.
Наилучший результат достигается, если первый пьезоэлектрический преобразователь имеет координаты ρ1=[θ1, φ1, R] в системе сферических координат с центром в центре сферического корпуса, где  (рад) угол места первого электроакустического преобразователя, φ1=0 (рад) - азимутальный угол первого электроакустического преобразователя.
(рад) угол места первого электроакустического преобразователя, φ1=0 (рад) - азимутальный угол первого электроакустического преобразователя.
Количество пьезоэлектрических преобразователей в зависимости от значения f - верхней частоты рабочей полосы частот гидролокатора определяется целой частью выражения  , где, с - скорость звука в воде.
, где, с - скорость звука в воде.
Улучшение направленных свойств гидроакустической антенны сферической формы, таких как сужение главного лепестка характеристики направленности при уменьшении уровня боковых лепестков, достигается за счет предложенного рационального способа размещения пьезоэлектрических преобразователей на поверхности сферического корпуса по спирали. Согласно изобретению пьезоэлектрические преобразователи размещаются на поверхности сферического корпуса более равномерно, чем в известных аналогах, что обеспечивает получение более равномерных характеристик направленности с меньшим уровнем бокового поля.
Количество пьезоэлектрических преобразователей не связано со способом их размещения на поверхности сферического корпуса, что делает процедуру проектирования сферической антенны более гибкой и удобной для разработчика.
Сущность изобретения поясняется на примере конструкции предлагаемой гидроакустической антенны сферической формы, у которой диаметр сферического корпуса составляет 450 мм, количество пьезоэлектрических преобразователей 224, рабочая частота гидролокатора 22 кГц (фиг.1, 2, 3, 4, 5, 6).
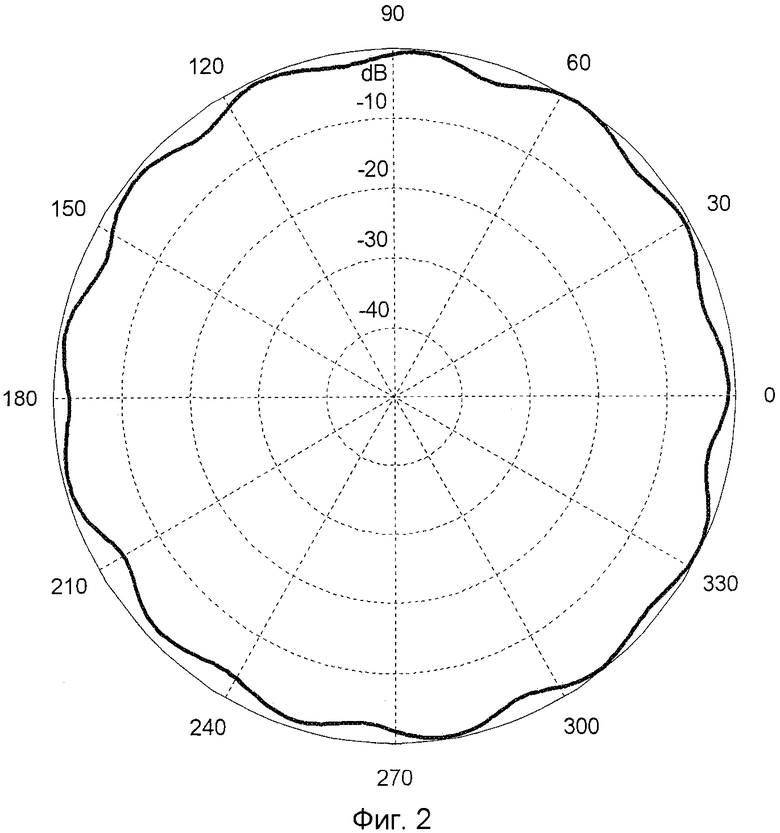
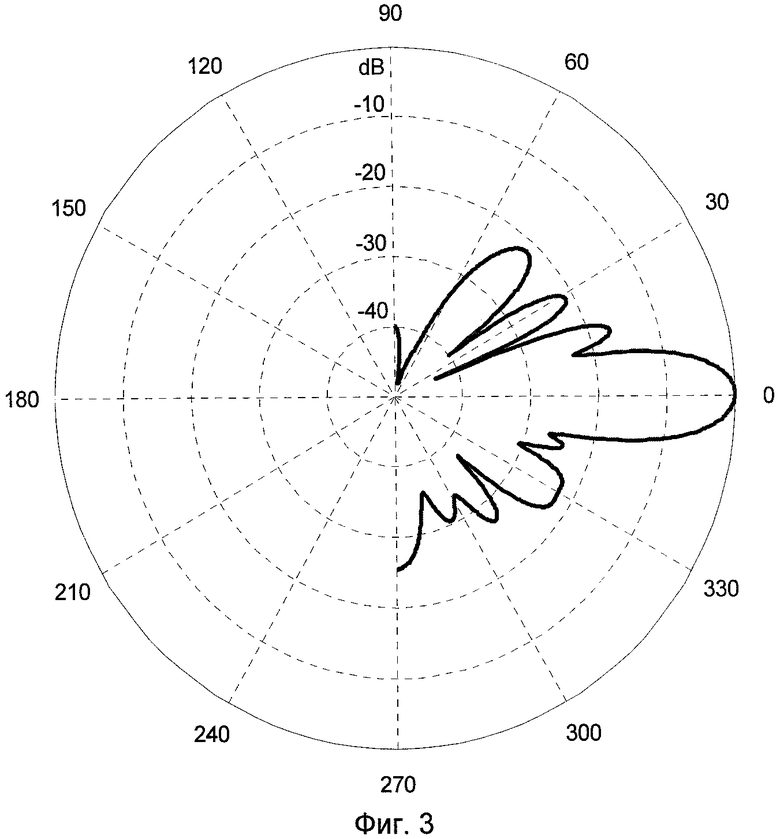
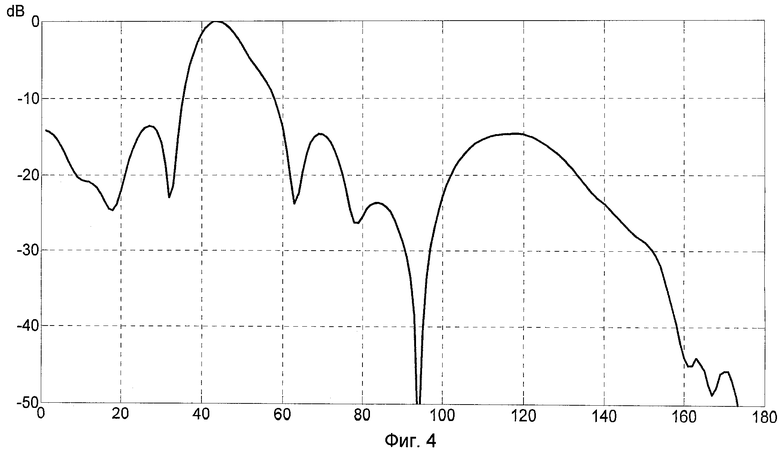
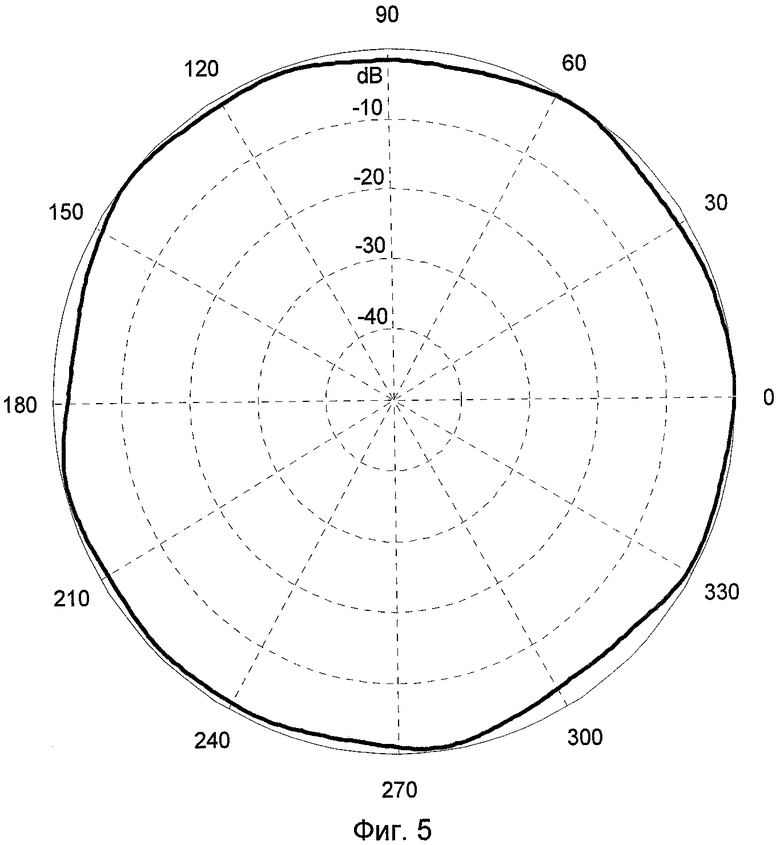
На фиг.1 приведен пример выполнения конструкции заявленной антенны; на фиг.2 - характеристика направленности заявленной антенны при работе в режиме ненаправленного излучения; на фиг.3 - характеристика направленности заявленной антенны в режиме направленного излучения с формированием однолучевой ХН; на фиг.4 - характеристика направленности заявленной антенны в режиме направленного излучения с формированием ХН в виде поверхности конуса (сечение ХН в вертикальной плоскости); на фиг.5 - характеристика направленности заявленной антенны в режиме направленного излучения с формированием ХН в виде поверхности конуса (сечение ХН в горизонтальной плоскости), на фиг.6 - веер однолучевых характеристик направленности заявленной антенны в режиме приема.
Заявленная гидроакустическая антенна сферической формы для гидролокатора представляет собой сферический корпус с установленными заподлицо с поверхностью сферического корпуса пьезоэлектрическими преобразователями, выполненными в виде стержневых пьезоэлементов. Сферический корпус может быть выполнен, например, из полимерного материала. При расчете сферических координат отдельных пьезоэлектрических преобразователей значение параметра N принимается равным 241, причем угол места первого пьезоэлектрического преобразователя рассчитывается по формуле  и равен 3,05 (рад). На поверхности сферического корпуса на месте последних 17 пьезоэлектрических преобразователей, попадающих в сферическую шапку с полным центральным углом 60°, имеется круглое отверстие диаметром 225 мм для крепления антенны к носителю гидролокатора. Таким образом, реальное количество размещенных пьезоэлектрических преобразователей 224. Электрический монтаж пьезоэлектрических преобразователей выполнен таким образом, чтобы обеспечить независимое управление амплитудой и фазой электрического напряжения, подаваемого на выводы каждого пьезоэлектрического преобразователя.
и равен 3,05 (рад). На поверхности сферического корпуса на месте последних 17 пьезоэлектрических преобразователей, попадающих в сферическую шапку с полным центральным углом 60°, имеется круглое отверстие диаметром 225 мм для крепления антенны к носителю гидролокатора. Таким образом, реальное количество размещенных пьезоэлектрических преобразователей 224. Электрический монтаж пьезоэлектрических преобразователей выполнен таким образом, чтобы обеспечить независимое управление амплитудой и фазой электрического напряжения, подаваемого на выводы каждого пьезоэлектрического преобразователя.
Схематически конструкция заявленной антенны показана на фиг. 1, где 1 - сферический корпус антенны; 2 - пьезоэлектрические преобразователи; 3 - фланец крепления, А - точка пересечения осью, проходящей через центр круглого отверстия и центр сферического корпуса, его наружной поверхности.
Работа гидроакустической антенны происходит следующим образом. В зависимости от режима излучения выбирается рабочая поверхность гидроакустической антенны сферической формы - сегмент сферической поверхности с содержащимися на нем и задействованными в цикле излучения пьезоэлектрическими преобразователями. Геометрия рабочей поверхности определяет количество пьезоэлектрических преобразователей, задействованных в цикле излучения, а также вид формируемой характеристики направленности. В режиме ненаправленного излучения рабочая поверхность представляет собой сферическую шапку с полным центральным углом до 200°. На выводы каждого задействованного пьезоэлектрического преобразователя подается синфазное электрическое напряжение со спадающим к краям рабочей поверхности амплитудным распределением. Вследствие пьезоэффекта возбуждаются продольные колебания стержневых пьезоэлектрических преобразователей. Звуковая энергия излучается с передних (рабочих) поверхностей стержневых пьезоэлектрических преобразователей, и вследствие интерференции звуковых волн в дальнем поле формируется характеристика направленности. Неравномерность характеристики направленности не превышает 2 дБ., что характеризует характеристику направленности как близкую к идеальной (фиг.2)
В режиме направленного излучения с формированием однолучевой ХН осуществляется компенсация пьезоэлектрических преобразователей, расположенной в пределах выпуклой рабочей поверхности, представляющей собой сферическую шапку с полным центральным углом 120°, к эквивалентному плоскому раскрыву. Работа указанной гидроакустической антенны сферической формы происходит следующим образом: на задействованные пьезоэлектрические преобразователи через электрические выводы подается одинаковое по амплитуде электрическое напряжение сигнала с компенсированным фазовым распределением, которое необходимо для возбуждения механических колебаний, обеспечивающих получение звуковых волн с излучающих поверхностей пьезоэлектрических преобразователей в окружающую среду.
Вследствие интерференции звуковых волн в дальнем поле формируется однолучевая характеристика направленности с основным лепестком, ось которого лежит в плоскости, перпендикулярной плоскости эквивалентного раскрыва и направлена вдоль оси, проходящей через центр жесткого сферического корпуса и геометрический центр рабочей поверхности.
В режиме направленного излучения с формированием ХН в виде поверхности конуса, максимум звуковой энергии излучается вдоль воображаемой поверхности конуса с вершиной, геометрически расположенной в центре сферического корпуса гидроакустической антенны. В вертикальном сечении (фиг.4) характеристика направленности имеет основной максимум в направлении вертикального угла наклона образующей воображаемого конуса. В горизонтальном сечении по углу места (фиг.5), соответствующему направлению основного максимума, характеристика направленности имеет заданную неравномерность уровня акустического поля. Рабочая поверхность в этом режиме представляет собой сферический пояс. На выводы пьезоэлектрических преобразователей рабочей поверхности гидроакустической антенны сферической формы подается напряжение со спадающим к краям сферического пояса амплитудным распределением и компенсирующим фазовым распределением, обеспечивающим синфазное сложение возбуждаемых звуковых волн в заданном по углу места направлении. Звуковая энергия излучается электроакустическими преобразователями, и вследствие интерференции звуковых волн в дальнем поле формируется конусообразная характеристика направленности в вертикальной плоскости.
При работе заявленной антенны в режиме приема на электрических выводах задействованных пьезоэлектрических преобразователей регистрируются сигналы, появляющиеся при вынужденных механических колебаниях, обусловленных воздействием звуковых волн на рабочие поверхности пьезоэлектрических преобразователей.
В режиме приема осуществляется формирование веера однолучевых характеристик направленности в горизонтальной плоскости, определяемой заданным углом места (фиг.6).
Экспериментальная отработка предлагаемой гидроакустической антенны была проведена на опытном образце, выполненном в полном соответствии с вышеописанной конструкцией, представленной на фиг. 1. Представленные на фиг.2-5 характеристики направленности образца при работе в режиме ненаправленного излучения (фиг.2), в режиме направленного излучения с формированием однолучевой ХН (фиг.3), в режиме направленного излучения с формированием ХН в виде поверхности конуса (фиг.4, 5) и в режиме приема с формированием веера однолучевых характеристик направленности (фиг.6) подтверждают, что заявленный технический результат - создание антенны сферической формы для гидролокатора, обладающей равномерным акустическим полем по всем направлениям трехмерного пространства и малым уровнем бокового поля, достигнут. При этом в зависимости от рабочей частоты гидролокатора на заявленной антенне можно разместить необходимое число пьезоэлектрических преобразователей.
Источники информации
1. Д.Е.Левашов. Современные суда и судовое оборудование для рыбопромысловых исследований. Издательство Москва ВНИРО. 2010 г. 1.
2. Патент FR 2709909 (А1), «Hydraulic acoustic antenna with a spherical support», опубл. 17.03.1995 г., МПК H04R 1/44.
3. Патент JP 2000162308 (A), «Ultrasonic wave-transmitting/receiving device for underwater search and underwater searching apparatus», опубл. 16.06.2006, МПК G01S 7/521 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СФЕРИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА | 2012 |
|
RU2515133C1 |
| ГИДРОАКУСТИЧЕСКАЯ АНТЕННА НАКАЧКИ | 2004 |
|
RU2292561C2 |
| МНОГОЧАСТОТНЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2017 |
|
RU2689998C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| ОДНОКАНАЛЬНАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА С ОСЕСИММЕТРИЧНОЙ ХАРАКТЕРИСТИКОЙ НАПРАВЛЕННОСТИ | 2015 |
|
RU2611724C1 |
| Способ управления формой основного лепестка характеристики направленности излучающей параметрической антенны и устройство для его реализации | 2019 |
|
RU2700042C1 |
| МНОГОЭЛЕМЕНТНАЯ ДВУМЕРНАЯ ДИСКРЕТНАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА | 2001 |
|
RU2217885C2 |
| Гидроакустическая станция для обнаружения малоразмерных объектов | 2017 |
|
RU2680673C1 |
Изобретение относится к гидроакустической технике и может быть использовано в гидролокаторах кругового обзора, в системах позиционирования судна по донным маякам, в рубежных гидроакустических системах обнаружения боевых пловцов и др. Предложена гидроакустическая антенна сферической формы для гидролокатора, содержащая сферический корпус, имеющий круглое отверстие для крепления к носителю гидролокатора. На сферическом корпусе пьезоэлектрические преобразователи установлены по спирали, закрученной по часовой стрелке и начинающейся от точки А пересечения осью, проходящей через центр круглого отверстия и центр сферического корпуса, его наружной поверхности. Приведены формулы для расчета местоположения преобразователей и их количества в зависимости от рабочей частоты гидролокатора. Это позволяет улучшить характеристики акустического поля заявленной гидроакустической антенны, а также повысить вариабельность этапа ее проектирования. 2 з.п. ф-лы, 6 ил.
1. Гидроакустическая антенна сферической формы для гидролокатора, содержащая имеющий круглое отверстие для крепления к носителю гидролокатора сферический корпус, на котором установлены пьезоэлектрические преобразователи, отличающаяся тем, что пьезоэлектрические преобразователи установлены на сферическом корпусе по спирали, закрученной по часовой стрелке и начинающейся от точки А пересечения осью, проходящей через центр круглого отверстия и центр сферического корпуса, его наружной поверхности, при этом первый по порядку пьезоэлектрический преобразователь расположен вблизи точки А, а остальные имеют координаты ρk=[θk φk R] в системе сферических координат с центром в центре сферического корпуса, где k=2…N порядковый номер пьезоэлектрического преобразователя, N - число пьезоэлектрических преобразователей,
(рад) - угол места k-го пьезоэлектрического преобразователя, - азимутальный угол k-го пьезоэлектрического преобразователя, R - радиус сферического корпуса.
2. Антенна по п.1, отличающаяся тем, что первый пьезоэлектрический преобразователь имеет координаты ρ1=[θ1, φ1, R] в системе сферических координат с центром в центре сферического корпуса, где (рад) - угол места первого пьезоэлектрического преобразователя, φ1=0 (рад) - азимутальный угол первого пьезоэлектрического преобразователя.
3. Антенна по п.1, отличающаяся тем, что количество пьезоэлектрических преобразователей определяется целой частью выражения , где f - верхняя частота рабочей полосы частот гидролокатора, с - скорость звука в воде.
| Устройство для отгонки ароматических углеводородов из промывного масла | 1926 |
|
SU31283A1 |
| АНТЕННА С КРУГОВОЙ ИЛИ СЕКТОРНОЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ | 1999 |
|
RU2146408C1 |
| JP 2000162308 A, 16.06.2000 | |||
| Низколегированный медный сплав | 2018 |
|
RU2709909C1 |
| US 2006164919 A1, 27.07.2006 | |||
| US 4207621 A, 10.06.1980 | |||
| JP 9269369 A, 14.10.1997 | |||
| Способ производства длинномерных полых изделий из низкоуглеродистых легированных сталей | 1984 |
|
SU1235936A1 |

