Изобретение относится к области радиотехники, в частности к радионавигации с использованием сигналов спутниковых навигационных систем (СНС) ГЛОНАСС, GPS, Galileo, BeiDou и др.
Предлагаемые способ и устройство могут быть использованы при создании навигационного оборудования, в частности в мультисистемных приемниках СНС, работающих по сигналам СНС ГЛОНАСС, GPS, Galileo, BeiDou и др. с поддержкой режимов сетевого и автономного ассистирования (режимы Network Assisted и Self Assited, соответственно) в части эфемеридной информации (ЭИ).
Навигационные космические аппараты (НКА) СНС ГЛОНАСС, GPS, Galileo, BeiDou в реальном времени передают потребителям оперативную эфемеридную информацию (ЭИ), соответствующую текущему моменту времени, которая содержит высокоточные данные о параметрах орбит (модель движения) и шкал времени (ШВ) НКА. Данная информация необходима для решения потребителем задачи определения местоположения (навигационная задача). При этом от точности оперативной ЭИ напрямую зависит точность решения потребителем навигационной задачи. Таким образом, потребителю в каждый момент времени необходимо иметь как можно более точную оперативную ЭИ.
В условиях затрудненного приема информации из навигационных сообщений (плотная городская застройка, высокий уровень помех и т.п.) возможны ситуации, когда навигационная аппаратура потребителя (НАП) неспособна принять оперативную ЭИ. В этом случае решение навигационной задачи невозможно. Помимо этого, даже в условиях устойчивого сигнала, прием оперативной ЭИ занимает продолжительное время, вплоть до 30 с, причем в течение этого времени решение навигационной задачи также невозможно.
Оперативная ЭИ, передаваемая НКА, в составе навигационных сообщений имеет ограничения по допустимому сроку действия. Ниже приведены сроки действия оперативной ЭИ и соответствующие им точности определения местоположения НКА:
- ГЛОНАСС - 0.5 часа/0.8-2.4 м;
- GPS/Galileo/BeiDou - 4 часа/0.9-2.7 м.
В связи с вышеизложенным, особую важность имеет задача долгосрочного прогноза ЭИ НКА.
Существуют способы формирования долгосрочной ЭИ, которые имеют следующие сроки действия и соответствующие им точности:
- 3 суток (URE (66%) <10-15 м);
- 7 суток (URE (66%) <15-20 м);
- 14 суток (URE(66%) <100 м).
Здесь URE (66%) <10 м означает, что в 66% случаев величина URE (эквивалентная ошибка измерения псевдодальности) не превосходит 10 метров.
Для прогноза ЭИ НКА известны режим сетевого ассистирования (Network Assisted) и режим автономного ассистирования (Self Assisted).
В режиме сетевого ассистирования (Network Assisted) помимо потребителя навигационной информации участвует сеть ассистирующих станций, которая через независимый информационный канал снабжает потребителя долгосрочной ЭИ (ассистирующая информация). На основе ассистирующей информации потребитель формирует прогноз оперативных эфемерид для НКА поддерживаемых навигационных систем вплоть до 14 суток вперед. В дальнейшем, в ситуациях, когда у потребителя отсутствует оперативная ЭИ, принимаемая из навигационных сообщений, используются спрогнозированные эфемериды.
В режиме автономного ассистирования (Self Assisted) потребитель накапливает оперативную ЭИ из навигационных сообщений (2-3 навигационных кадра на интервале 1-2 суток). На основе данной информации пользователь формирует некую долгосрочную компактную эфемеридную информацию (ДКЭИ). В дальнейшем, на основе данной ДКЭИ, потребитель осуществляет прогноз оперативных эфемерид для поддерживаемых НКА вплоть до 14 суток вперед. Дальнейшее применение прогнозной ЭИ аналогично режиму сетевого ассистирования.
В настоящее время известны и распространены следующие коммерческие ассистирующие решения:
- Rx Networks - «GPS Stream PGPS» [1];
- JPL - «GDGPS/AEP» [2];
- CSR - «InstantFix» [3];
- uBIox - «Assist Now»; [4];
- Broadcom - LTO-AGPS [5].
Существующие коммерческие ассистирующие решения используют следующие способы осуществления долгосрочного прогноза ЭИ:
- высокоточное численное интегрирование уравнений движения НКА, обозначим его - метод 1 (М1);
- интерполяция Кеплеровых элементов орбиты НКА на интервале прогноза, обозначим его - метод 2 (М2).
Метод 1 является обобщением метода прогнозирования движения НКА, применяемого в СНС ГЛОНАСС [6]. Особенностями данного метода являются:
- использование высокоточной модели движения НКА;
- большие вычислительные затраты, вследствие использования высокоточной модели движения;
- минимальный объем исходных данных для прогноза эфемерид, для прогноза необходимы лишь высокоточные начальные условия движения НКА, причем, в режиме сетевого ассистирования объем передаваемой ЭИ будет минимальным;
- возможно автономное использование (реализация режима автономного ассистирования).
Метод 2 является обобщением метода прогнозирования движения НКА, применяемого в СНС GPS/Galileo/BeiDou [7]. Основу данного метода составляет разложение кеплеровых элементов орбиты в ряд Фурье. Особенности данного метода:
- метод не является самостоятельным, необходимо применение Метода 1 для формирования исходных данных при выполнении прогноза, следовательно, невозможна реализация режима автономного ассистирования;
- малые вычислительные затраты (вычисление значений ряда Фурье, решение уравнения Кеплера);
- большой объем исходных данных (коэффициенты Фурье Кеплеровых элементов орбиты), следовательно, в режиме сетевого ассистирования существенно возрастает объем передаваемой ЭИ, по сравнению с Методом 1.
Заявленные способ и устройство обработки навигационных сигналов и определения местоположения с использованием ДКЭИ основаны на использовании Метода 1.
Ниже в таблицах (Таблица 1, Таблица 2) приведено сравнение основных характеристик ассистирующих решений, построенных с использованием заявляемого способа, с известными коммерческими ассистирующими решениями.
Из уровня техники известно техническое решение [8] «Метод распределенного моделирования орбит для ассистирующих систем длительного и реального времени» [«Distributed orbit modeling and propagation method for a predicted and real-time assisted GPS system»], полученный на технологию A-GPS, которую компания разработала и ныне активно использует в своих продуктах GPStream™ PGPS™ and GPStream™ SAGPS™. Патент выдан на разработанный инновационный способ расчета положения НКА СНС GPS на орбите. Технология долгосрочной ЭИ (или долгосрочных эфемерид) увеличивает зону приема сигнала GPS в городской местности и уменьшает время загрузки НАП до нескольких десятков секунд, вместо прежних минут.
GPStream PGPS и GPStream SAGPS реализуют технологию долгосрочных эфемерид, что снижает затраты на передачу данных Secure User-Plane Location (SUPL) и не требует изменения конфигурации НАП. Система GPStream PGPS обходится гораздо меньшим количеством принимаемых данных (2 «Байт в неделю для СНС GPS, по сравнению с 2 КБайт в течение 2 часов по каналу SUPL), благодаря чему время загрузки НАП сокращается до нескольких секунд. Эти характеристики обеспечивают популярность системы GPStream PGPS среди операторов мобильной связи.
Недостатками данного технического решения являются:
- отсутствие поддержки СНС ГЛОНАСС, Galileo, BeiDou;
- объем передаваемых данных (2 КБайт в неделю) для поддержания одной СНС, например GPS, может быть существенно сокращен.
Наиболее близким к заявляемому решению по способу обработки навигационных сигналов и определения местоположения с использованием ДКЭИ является известное техническое решение [9], заключающееся в формировании ДКЭИ на сервере ассистирующей сети или в навигационном приемнике на основе информации о положениях навигационных космических аппаратов (НКА) и их шкал времени и параметров вращения Земли, причем если ДКЭИ формируют на сервере, то ДКЭИ передают в навигационный приемник при помощи сети Интернет и модема, в формировании эфемеридной информации (ЭИ) на текущий момент времени на основе ДКЭИ и определении местоположения без использования ЭИ из навигационных сообщений, при этом, формат ЭИ, формируемой на основе ДКЭИ на текущий момент времени, соответствует интерфейсным контрольным документам спутниковых навигационных систем GPS/ГЛОНАСС/Galileo.
Однако это изобретение имеет следующие недостатки:
- низкая скорость осуществления прогноза ЭИ на навигационном оборудовании, обладающем малыми вычислительными ресурсами;
- требуется большой объем ресурсов, необходимых для хранения и/или передачи долгосрочной ЭИ для навигационного оборудования, использующего сигналы СНС GPS/ГЛОНАСС/Galileo;
- отсутствие поддержки СНС BeiDou.
Из уровня техники известно техническое решение, являющееся аналогом устройства обработки навигационных сигналов и определения местоположения с использованием ДКЭИ [9], содержащее сервер ассистирующей сети, навигационный приемник, НКА СНС GPS, GLONASS или Galileo, при этом навигационный приемник связан с процессором для выработки прогнозированного вектора орбитального состояния и использующий полученные от сервера ассистирующей сети прогнозированный вектор орбитального состояния для выработки текущей спутниковой эфемеридной информации, аналоговые радиоприемные тракты сигналов GPS, а спутниковая эфемеридная информация на текущий момент времени предоставляются в форматах GPS, GLONASS или Galileo.
Однако это устройство имеет недостатки, такие как:
- низкая скорость получения прогнозируемой эфемеридной информации на навигационном оборудовании, которое не обладает достаточными вычислительными ресурсами;
- требуется большой объем памяти, необходимый для хранения и/или передачи долгосрочной эфемеридной информации для навигационного оборудования, использующего сигналы навигационных систем GPS/ГЛОНАСС/Galileo;
- отсутствие поддержки СНС BeiDou.
Наиболее близким к заявляемому решению по устройству обработки навигационных сигналов и определения местоположения с использованием ДКЭИ является известное техническое решение [10], включает навигационный приемник, причем упомянутый навигационный приемник включает в себя антенно-фидерное устройство, аналоговые радиоприемные тракты сигналов систем GPS, ГЛОНАСС, Galileo, аналого-цифровые преобразователи, блок оперативной памяти и памяти программ, процессор общего назначения, интерфейсный блок, шины внутрисистемного обмена информацией.
Однако прототип имеет недостатки, такие как:
- низкая скорость осуществления прогноза ЭИ на навигационном оборудовании;
- отсутствие поддержки СНС BeiDou;
- не предоставляет решение навигационной задачи в условиях отсутствия оперативной ЭИ (режимы Network Assisted и Self Assisted).
В основу изобретения поставлена задача создания такого способа и реализующего его устройства, которые устранят вышеуказанные недостатки прототипа, а именно, предоставят решение навигационной задачи в условиях отсутствия оперативной ЭИ (режимы Network Assisted и Self Assisted) для НАП, которая обладает малыми вычислительными ресурсами, и, при этом, существенно сократят объем ресурсов, необходимых для хранения и/или передачи долгосрочной ЭИ.
Решение данной задачи в ряде случаев позволяет сократить время первого решения (TTFF) вплоть до 1-2 с, а также косвенным образом повысить чувствительность навигационного приемника в некоторых случаях вплоть до 10 dB.
Техническим результатом данного изобретения является возможность определения местоположения без использования ЭИ из эфира в НАП, обладающей малыми вычислительными ресурсами.
Дополнительным техническим результатом является формирование ДКЭИ малого объема, причем объем формируемой ДКЭИ составляет не более 1200 байт для 32 НКА GPS, не более 1000 байт для 24 НКА ГЛОНАСС, не более 1200 байт для 30 НКА Galileo и не более 1300 байт для 35 НКА BeiDou.
Дополнительно изобретение обеспечит повышение точности и надежности решения потребителем навигационной задачи за счет возможности контроля оперативной эфемеридной информации путем ее сравнения с ЭИ, получаемой путем прогноза на основе ДКЭИ.
Технический результат достигается за счет того, что ДКЭИ формируют на сервере ассистирующей сети или в навигационном приемнике на основе информации о положениях НКА и их ШВ и параметров вращения Земли, причем если ДКЭИ формируют на сервере, то ДКЭИ передают в навигационный приемник при помощи сети Internet и модема, на основе ДКЭИ формируют ЭИ на текущий момент времени и определяют местоположение без использования ЭИ из навигационных сообщений, при этом, формат ЭИ, формируемой на основе ДКЭИ на текущий момент времени, соответствует интерфейсным контрольным документам систем GPS/ГЛОНАСС/Galileo/BeiDou, при этом ДКЭИ вычисляют на сервере ассистирующей сети на основании информации о положениях НКА и их ШВ на протяжении последних прошедших суток, загружаемой на сервер ассистирующей сети через сеть Internet с серверов организаций IGS (для систем GPS, Galileo, BeiDou) и СВОЭВП (для системы ГЛОНАСС), параметров вращения Земли на середину последних прошедших суток, загружаемых через сеть Internet с сервера международной службы вращения Земли (IERS), причем для получения ДКЭИ используется высокоточная модель движения НКА, использующая: высокоточную модель прецессии и нутации Земли, высокоточную модель притяжения Земли с учетом вариаций статических гармоник геопотенциала вследствие приливов поверхности, высокоточную модель движения Луны и Солнца, давление солнечного света с учетом теневых участков орбиты, метод интегрирования Эверхарта с малым шагом интегрирования (несколько десятков секунд); далее осуществляют вычисление ЭИ НКА GPS/ГЛОНАСС/Galileo/BeiDou на текущий момент времени, причем используют упрощенную модель движения НКА, использующую: кусочно-линейную аппроксимацию (упрощение) модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд); вычисляют перечень видимых НКА, производят оценку доплеровских частот сигналов и с использованием полученной ЭИ на текущий момент времени, осуществляют дальнейшие операции поиска, захвата, сопровождения принятых сигналов и определения местоположения потребителя без использования ЭИ, передаваемой в навигационных сообщениях GPS/ГЛОНАСС/Galileo/BeiDou.
В случае если ДКЭИ формируют в навигационном приемнике (режим автономного ассистирования - Self Assited), то ДКЭИ формируют на основании информации о положениях НКА и их ШВ, содержащейся в информации навигационных сообщений НКА GPS/ГЛОНАСС/Galileo/BeiDou, принятых навигационным приемником в течение последних прошедших суток, средних значений параметров вращения Земли, причем для получения ДКЭИ используется упрощенная модель движения НКА, использующая: кусочно-линейную аппроксимацию модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд); далее, осуществляют вычисление ЭИ НКА GPS/ГЛОНАСС/Galileo/BeiDou на текущий момент времени, причем используют упрощенную модель движения НКА, использующую: кусочно-линейную аппроксимацию модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд); вычисляют перечень видимых НКА, производят оценку доплеровских частот сигналов и с использованием полученной ЭИ на текущий момент времени осуществляют дальнейшие операции поиска, захвата, сопровождения принятых сигналов и определения местоположения потребителя без использования ЭИ, передаваемой в навигационных сообщениях GPS/ГЛОНАСС/Galileo/BeiDou.
Для повышения точности и надежности решения потребителем навигационной задачи осуществляют контроль достоверности ЭИ, принимаемой из навигационных сообщений, с помощью ЭИ, формируемой на основе ДКЭИ, на текущий момент времени.
ДКЭИ формируют путем следующих операций: загружают данные о положениях НКА в земной системе координат, положениях ШВ НКА и параметрах вращения Земли на протяжении последних прошедших суток, далее с помощью метода наименьших квадратов для каждого НКА вычисляют уточненные значения параметров орбит 
где 

Cref - коэффициент эффективного отражения поверхности НКА, и ШВ НКА (a 0, a 1),
где а 0 - значение ШВ k-го НКА на момент времени уточнения,
а 1 - скорость изменения ШВ k-го НКА,
вычисляют Кеплеровы элементы орбиты НКА: вектор 
где, А - большая полуось;
ε - эксцентриситет;
i - наклонение;
Ω - долгота восходящего узла;
ω - аргумент перигея;
М - средняя аномалия вычисляют отклонения Кеплеровых элементов орбиты НКА от средних значений (ΔA(k), Δi(k)) по формулам:
ΔА(k)=А(k)-Am,
Δi(k)=i(k)-im,
где k - номер НКА, A(k), i(k) - значения большой полуоси и наклонения орбиты k-го аппарата, соответственно;
Am, im - средние значения большой полуоси и наклонения, которых определены для соответствующей СНС в целом,
сохраняют параметры модели движения НКА в виде(ΔА, ε, Δi, Ω, ω, М, Cref), параметры ШВ НКА (а 0, а 1,) сохраняют без специальных преобразований, причем объем формируемой ДКЭИ составляет не более 1200 байт для 32 НКА GPS, не более 1000 байт для 24 НКА ГЛОНАСС, не более 1200 байт для 30 НКА Galileo и не более 1300 байт для 35 НКА BeiDou.
Таким образом, способ обработки навигационных сигналов и определения местоположения с использованием ДКЭИ обладает следующими новыми особенностями, отличающими его от существующих решений:
- применение сверхбольших шагов интегрирования (несколько сотен секунд) за счет применения метода Эверхарта для численного интегрирования уравнений движения НКА;
- кусочно-линейная аппроксимация углов прецессии и нутации во времени для повышения скорости прогноза ЭИ на навигационном оборудовании, обладающем малыми вычислительными ресурсами;
- способ представления ДКЭИ в виде сохраненных параметров моделей движения НКА в виде отклонений Кеплеровых элементов относительно средних значений, характерных для соответствующей СНС в целом. В таком виде представляются следующие параметры орбиты: большая полуось и наклонение орбиты.
Устройство для осуществления описанного способа включает в свой состав навигационный приемник, включающий антенно-фидерное устройство, аналоговые радиоприемные тракты сигналов СНС GPS, ГЛОНАСС, Galileo, аналого-цифровые преобразователи, блок оперативной памяти и памяти программ, процессор общего назначения, интерфейсный блок, шины внутрисистемного обмена информацией, при этом, навигационный приемник содержит аналоговый радиоприемный тракт сигналов системы BeiDou, специализированный процессор для вычисления упрощенной модели движения НКА, GSM/WiFi модем для сопряжения навигационного приемника с ассистирующей сетью через сеть Internet, энергонезависимую память для хранения предварительно вычисленной ДКЭИ, причем все блоки, входящие в навигационный приемник, связаны между собой шиной внутрисистемного обмена информацией, причем в состав ассистирующей сети входят сервер международной службы IGS, сервер международной службы IERS, сервер системы СВОЭВП и сервер ассистирующий сети, выходы серверов IGS, IERS и СВОЭВП связаны со входами сервера ассистирующей сети, выход сервера ассистирующей сети связан через сеть Internet со входом GSM/WiFi-модема навигационного приемника. Совокупность существенных признаков устройства достаточны для достижения обеспечиваемого изобретением технического результата, а именно устройство обработки навигационных сигналов и определения местоположения с использованием долгосрочной компактной эфемеридной информации предоставляет решение навигационной задачи в условиях отсутствия оперативной ЭИ (режимы Network Assisted и Self Assisted) для НАП, которая обладает малыми вычислительными ресурсами, и, при этом, существенно сокращает объем ресурсов, необходимых для хранения и/или передачи долгосрочной ЭИ. Кроме этого, в устройстве обеспечивается поддержка СНС BeiDou.
Сущность изобретения поясняет блок-схема устройства обработки навигационных сигналов и определения местоположения с использованием ДКЭИ, представленная на фиг.1, где 1 - навигационный приемник, 2 - антенно-фидерное устройство, 3 - аналоговые радиоприемные тракты ГЛОНАСС, GPS, Galileo, BeiDou, 4 - аналогово-цифровые преобразователи, 5 - блок оперативной памяти и памяти программ, 6 - процессор общего назначения, 7 - интерфейсный блок, 8 - шина внутрисистемного обмена информацией, 9 - специализированный процессор для вычисления упрощенной модели движения НКА, 10 - энергонезависимая память, 11 - GSM/Wi-Fi модем, 12 - ассистирующая сеть, 13 - сервер параметров вращения Земли - IERS, 14 - сервер IGS, 15 - сервер СВОЭВП, 16 - сервер ассистирующей сети, 17 - сеть Internet.
Способ обработки навигационных сигналов и определения местоположения с использованием ДКЭИ осуществляется следующим образом.
ДКЭИ формируют на сервере ассистирующей сети или в навигационном приемнике на основе информации о положениях НКА и их ШВ и параметров вращения Земли, причем если ДКЭИ формируют на сервере, то ДКЭИ передают в навигационный приемник при помощи сети Internet и модема.
На основе ДКЭИ формируют ЭИ на текущий момент времени и определяют местоположение без использования ЭИ из навигационных сообщений, при этом, формат ЭИ, формируемой на основе ДКЭИ на текущий момент времени, соответствует интерфейсным контрольным документам систем GPS/ГЛОНАСС/Galileo/BeiDou.
ДКЭИ вычисляют на сервере ассистирующей сети на основании информации о положениях НКА и их ШВ на протяжении последних прошедших суток. Данная информация загружается на сервер ассистирующей сети через сеть Internet с серверов организаций IGS (для систем GPS, Galileo, BeiDou) и СВОЭВП (для системы ГЛОНАСС). Помимо этого на сервер ассистирующей сети загружаются параметры вращения Земли на середину (на 12:00 часов) последних прошедших суток. Данная информация загружается через сеть Internet с сервера международной службы вращения Земли (IERS).
В способе обработки навигационных сигналов и определения местоположения с использованием ДКЭИ для моделирования движения НКА учитываются следующие силовые факторы:
- притяжение Земли с учетом вариаций статических гармоник геопотенциала вследствие приливов поверхности Земли;
- притяжение Луны и Солнца;
- давление солнечного света с учетом теневых участков орбиты. Уравнение движения НКА, используемое в описываемом способе, имеет вид:
где 




Правая часть данного уравнения далее называется силовой функцией.
Статический геопотенциал имеет вид [11]:

где fme - геоцентрическая гравитационная постоянная Земли;
r0 - экваториальный радиус Земли;
Cnk, Snk - коэффициенты при гармониках разложения гравитационного поля Земли в ряд по сферическим функциям;

r, φ, λ - сферические координаты НКА в земной системе координат (ЗСК);
Nmax - максимальный порядок разложения геопотенциала.
Ускорения НКА вследствие притяжения Земли в земной системе координат (ЗСК) имеют вид:

В описываемом способе используется стандартная модель разложения геопотенциала - JGM-3 [12] с ограниченным максимальным порядком разложения.
Ускорения НКА вследствие притяжения Луны и Солнца в описываемом способе вычисляются так [13]:

где fmm, fms - гравитационные постоянные Луны и Солнца;


Давление солнечного света в описываемом способе находится по формуле [14]:
где Cref, - коэффициент эффективного отражения НКА;
а - среднее расстояние от Земли до Солнца;

Для интегрирования дифференциальных уравнений движения НКА в описываемом способе используется численный метод Эверхарта [15].
Также в способе обработки навигационных сигналов и определения местоположения с использованием ДКЭИ используется линейная ШВ НКА:
τ(t)=a 0+a 1·t,
где τ(t) - значение сдвига ШВ НКА в момент времени t;
а 0, а 1 - параметры ШВ, определяются на этапе уточнения параметров орбиты и ШВ, описанном ниже.
Для различных случаев требуются различные сочетания скорости и точности модели движения НКА. Так, на сервере ассистирующей сети, который обладает большим вычислительным ресурсом, необходимо использовать максимально точную модель движения. В тех условиях, когда вычислительный ресурс существенно ограничен (например, в случае моделирования движения НКА для НАП) необходимо применять различного рода аппроксимации модели движения и максимально допустимый шаг интегрирования, которые при незначительном снижении точности дают существенное сокращение вычислительных затрат.
В способе обработки навигационных сигналов и определения местоположения с использованием ДКЭИ одним из способов увеличения скорости прогноза эфемерид является применение максимально возможного шага интегрирования. Шаг интегрирования оказывает непосредственное влияние на время выполнения прогноза положения НКА, чем больше шаг интегрирования, тем меньше вычислений силовой функции необходимо произвести для осуществления прогноза. На сервере ассистирующей сети используется малый шаг интегрирования (несколько десятков секунд), в НАП используется сверхбольшой шаг интегрирования (несколько сотен секунд).
Помимо этого в способе обработки навигационных сигналов и определения местоположения с использованием ДКЭИ определяют следующие аппроксимации модели движения НКА:
- аппроксимацию прецессии;
- аппроксимацию нутации;
- аппроксимацию геопотенциала Земли;
- аппроксимацию модели движения Луны и Солнца;
- аппроксимацию модели давления солнечного света.
Как уже было отмечено ранее, в заявляемом способе для интегрирования дифференциальных уравнений движения НКА используется численный метод Эверхарта [15]. Основным достоинством метода Эверхарта применительно к задаче моделирования движения НКА является возможность высокоточного интегрирования со сверхбольшим шагом (несколько сотен секунд). Несмотря на использование сверхбольшого шага интегрирования, удается добиться того, что при прогнозе положения НКА на 1 сутки вперед с помощью описываемого способа, абсолютная ошибка положения оказывается менее 1 м. Отметим, что для обеспечения данной точности прогноза с помощью таких распространенных методов численного интегрирования как метод Рунге-Кутта 8-го порядка и метод Адамса-Мультона [15] необходимо использовать шаг интегрирования не более нескольких десятков секунд. Следовательно, время решения задачи прогнозирования положения НКА в случае использования методов интегрирования Рунге-Кутты или Адамса-Мультона будет в несколько раз больше, чем в случае использования метода Эверхарта. В итоге, использование метода Эверхарта со сверхбольшим шагом позволяет существенно сократить вычислительные затраты НАП при прогнозе оперативных эфемерид на основе долгосрочной ЭИ.
При моделировании движения НКА используются различные системы координат (СК). Так, интегрирование дифференциальных уравнений движения осуществляется в АСК, а сила притяжения Земли вычисляется в ЗСК.
Переход из АСК в ЗСК выполняется по формуле [16]:
 ,
,
где 

Rch - матрица Чандлеровского движения Земли;
R - матрица вращения Земли;
N - матрица нутации;
Р - матрица прецессии.
Отметим также, что каждая из матриц, входящих в правую часть данного уравнения, зависит от момента времени, для которого осуществляется преобразование координат. Таким образом, при осуществлении моделирования движения НКА на каждом шаге интегрирования необходимо заново вычислять каждую из перечисленных матриц.
С вычислительной точки зрения наиболее сложными для вычисления являются матрицы нутации и прецессии - N и Р. Данные матрицы в свою очередь однозначно задаются параметрами прецессии и нутации:
- ζ(t), θ(t), z(t) - параметры прецессии;
- Δψ(t), Δε(t) - нутация по долготе и по наклону, соответственно.
Здесь t - момент времени, для которого осуществляется преобразование координат.
Параметры прецессии и нутации представляют собой угловые величины, скорость изменения которых во времени невелика. В связи с этим, данные величины могут быть аппроксимированы во времени с помощью ступенчатых или кусочно-линейных функций ζ′(t), θ′(t), z′(t), Δψ′(t), Δε′(t). Для получения полного описания данных приближенных функций достаточно вычислить значение исходных функций в нескольких узлах на интервале прогноза. Описываемый способ обработки навигационных сигналов и определения местоположения с использованием ДКЭИ определяет, что параметры прецессии и нутации пересчитываются один раз в несколько часов.
Еще одним способом снижения вычислительной сложности задачи моделирования движения НКА и, соответственно, увеличения скорости прогноза, является аппроксимация силовой функции в уравнениях движения. Описываемый способ обработки навигационных сигналов и определения местоположения с использованием ДКЭИ определяет следующие аппроксимации силовой функции:
- аппроксимацию геопотенциала Земли;
- аппроксимацию модели движения Луны и Солнца;
- аппроксимацию модели давления солнечного света.
Данные аппроксимации позволяют значительно снизить сложность вычисления силовой функции, а, следовательно, и всей задачи прогноза.
В результате использования всех описанных выше аппроксимаций удается существенно снизить сложность вычислений при сохранении высокой точности прогноза и обеспечить возможность применения долгосрочных эфемерид даже на малопроизводительной НАП.
Высокоточная модель движения НКА способна обеспечить высокую точность прогноза оперативных эфемерид только в случае наличия высокоточных начальных условий движения НКА. Начальные условия движения НКА могут быть вычислены на основе оперативных эфемерид, передаваемых в составе навигационных сообщений. Однако полученные таким образом начальные условия не позволяют обеспечить высокую точность прогноза эфемерид. Проблема заключается в том, что оперативные эфемериды, передаваемые в составе навигационных сообщений, оптимизированы для использования совместно со стандартными моделями движения, регламентированными интерфейсными контрольными документами соответствующих СНС. В связи этим использование оперативных эфемерид совместно с высокоточной моделью движения приводит к неудовлетворительной точности прогноза. Аналогичным образом дело обстоит с параметрами ШВ НКА.
Таким образом, возникает задача уточнения параметров орбиты и ШВ для их последующего использования совместно с высокоточной моделью. Заметим также, что данная задача необходима как для режима сетевого ассистирования, так и для режима автономного ассистирования. В случае сетевого ассистирования данная задача решается на стороне ассистирующей сети, а уточненные параметры модели движения и ШВ передаются потребителю и представляют собой долгосрочную ЭИ. В случае автономного ассистирования потребитель самостоятельно решает задачу уточнения параметров моделей движения и ШВ НКА и с использованием данной информации в дальнейшем осуществляет прогноз оперативных эфемерид.
Описываемый способ обработки навигационных сигналов и определения местоположения с использованием ДКЭИ определяет следующие шаги уточнения параметров модели движения НКА:
- для уточнения параметров используется широко-распространенный метод наименьших квадратов [17];
- уточняемыми параметрами модели движения НКА являются величины 

Cref - коэффициент эффективного отражения НКА.
- в качестве итерационного метода в задаче уточнения используется метод Ньютона [17];
- число итераций уточнения фиксировано;
- исходными данными для задачи уточнения являются:
- данные о фактическом положении НКА в ЗСК 
- данные о параметрах вращения Земли 
Здесь 
где x, y - координаты мгновенного полюса;
d - разница ШВ UT1-UTC в заданный момент времени;
- для режима сетевого ассистирования для уточнения используется максимально точная модель движения, а в режиме автономного ассистирования используются описанные ранее аппроксимации.
Описываемый способ обработки навигационных сигналов и определения местоположения с использованием ДКЭИ определяет следующий метод решения задачи уточнения параметров ШВ НКА:
- для уточнения параметров ШВ используется метод наименьших квадратов (МНК) [17];
- уточняемыми параметрами модели ШВ является набор (а 0, a 1,), описанный ранее;
- в качестве итерационного метода в задаче уточнения используется метод Ньютона [17];
- в связи с тем, что модель ШВ является линейной, то для уточнения параметров (а 0, a 1,) достаточно одной итерации;
- исходными данными для задачи уточнения являются данные о фактических значениях ШВ НКА (τ1,…,τk) в моменты времени (t1,…,tn).
Отметим, что параметры модели движения и ШВ НКА уточняются на момент времени t≤ti, для всех i=1,…,n, где i - номер НКА.
Информация о фактических положениях НКА в земной системе координат 
- информация об оперативных эфемеридах НКА, содержится в навигационных сообщениях (достаточно иметь информацию об эфемеридах в 2-3 узловых точках на интервале последних прошедших суток);
- интернет-сервера некоторых сторонних организаций, которые периодически уточняют параметры движения НКА и предоставляют их в открытый доступ [18, 19] и другие).
- данные о параметрах вращения Земли также регулярно уточняются и выкладываются в открытый доступ на следующих интернет-серверах [18-20].
ЭИ НКА GPS/ГЛОНАСС/Galileo/BeiDou на текущий момент времени вычисляют, используя упрощенную модель движения НКА, использующую: кусочно-линейную аппроксимацию модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд). Далее, вычисляют перечень видимых НКА, производят оценку доплеровских частот сигналов и с использованием полученной ЭИ на текущий момент времени осуществляют дальнейшие операции поиска, захвата, сопровождения принятых сигналов и определения местоположения потребителя без использования ЭИ, передаваемой в навигационных сообщениях GPS/ГЛОНАСС/Galileo/BeiDou.
Когда в устройство, реализующее способ обработки навигационных сигналов и определения местоположения с использованием ДКЭИ, не входит ассистирующая сеть (режим автономного ассистирования - Self Assisted), тогда способ реализуется следующим образом.
ДКЭИ формируют на основании информации о положениях НКА и их ШВ, содержащейся в информации навигационных сообщений НКА GPS/ГЛОНАСС/Galileo/BeiDou, принятых навигационным приемником на протяжении последних прошедших суток. Помимо этого используют средние значения параметров вращения Земли. Для получения ДКЭИ используется упрощенная модель движения НКА, использующая: кусочно-линейную аппроксимацию модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд); осуществляют вычисление эфемеридной информации НКА GPS/ГЛОНАСС/Galileo/BeiDou на текущий момент времени, причем используют упрощенную модель движения НКА, использующую: кусочно-линейную аппроксимацию модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд); вычисляют перечень видимых НКА, производят оценку доплеровских частот сигналов и с использованием полученной эфемеридной информации на текущий момент времени осуществляют дальнейшие операции поиска, захвата, сопровождения принятых сигналов и определения местоположения потребителя без использования эфемеридной информации, передаваемой в навигационных сообщениях GPS/ГЛОНАСС/Galileo/BeiDou.
ДКЭИ представляет собой набор исходных данных, относящихся к некоторому моменту времени t0, на основе которого потребитель может спрогнозировать (рассчитать) оперативную ЭИ на момент времени t1>t0. В случае режима сетевого ассистирования (Network Assisted) ДКЭИ формируется в ассистирующей сети и по каналу связи передается потребителю. В связи с этим особую важность имеет способ компактного представления (хранения) ДКЭИ, который с одной стороны предъявляет минимальные требования к объему информации, передаваемой потребителю со стороны ассистирующей сети, а с другой стороны позволяет осуществлять высокоточный прогноз оперативных эфемерид.
Описываемый способ обработки навигационных сигналов и определения местоположения с использованием ДКЭИ формирует ДКЭИ путем следующих операций: загружают данные о положениях НКА в земной системе координат, положениях ШВ НКА и параметрах вращения Земли на протяжении последних прошедших суток, далее, с помощью метода наименьших квадратов вычисляют уточненные значения параметров орбит 

ΔА(k)=А(k)-Am,
Δi(k)=i(k)-im,
где k - номер НКА, А(k), i(k) - значения большой полуоси и наклонения орбиты k-го НКА, соответственно, Am, im - средние значения большой полуоси и наклонения, которых определены для соответствующей СНС в целом, сохраняют параметры модели движения для каждого НКА в виде (ΔA, ε, Δi, Ω, ω, M, Cref), причем параметры ШВ НКА (а 0, а 1) сохраняют без специальных преобразований.
Устройство обработки навигационных сигналов и определения местоположения с использованием ДКЭИ работает следующим образом.
Сервер ассистирующей сети загружает информацию о положениях НКА и их ШВ на протяжении последних прошедших суток с серверов организаций IGS и СВОЭВП, параметры вращения Земли на середину последних прошедших суток с сервера международной службы вращения Земли (IERS), далее на основе данной информации сервер ассистирующей сети вычисляет ДКЭИ, при этом, используется известный метод наименьших квадратов, высокоточная модель движения НКА, использующая: высокоточную модель прецессии и нутации Земли, высокоточная модель притяжения Земли с учетом вариаций статических гармоник геопотенциала вследствие приливов поверхности, высокоточная модель движения Луны и Солнца, давление солнечного света с учетом теневых участков орбиты, метод интегрирования Эверхарта с малым шагом интегрирования (несколько десятков секунд). Полученная ДКЭИ загружается в навигационный приемник при помощи сети Internet и GSM/WiFi-модема и сохраняется в энергонезависимую память приемника. На основе ДКЭИ специализированный процессор вычисляет упрощенную модель движения НКА и ШВ НКА, формирует ЭИ в формате, соответствующем ИКД GPS/ГЛОНАСС/Galileo/BeiDou, и сохраняет полученную ЭИ в энергонезависимую память. Далее, в случае отсутствия ЭИ из навигационных сообщений, навигационный приемник использует ЭИ, соответствующую текущему моменту времени, для операций операции поиска, захвата, сопровождения принятых сигналов и определения местоположения потребителя без использования ЭИ, передаваемой в навигационных сообщениях.
На серверах IERS, IGS и СВОЭВП сохраняют информацию, которая используется в качестве исходных данных для дальнейшего формирования ДКЭИ, о положениях НКА и их ШВ на протяжении последних прошедших суток, параметров вращения Земли на середину последних прошедших суток.
На сервере ассистирующей сети вычисляют и формируют ДКЭИ.
В навигационном приемнике выходы антенно-фидерного устройства связаны с соответствующими входами аналоговых радиоприемных трактов сигналов СНС GPS, ГЛОНАСС, Galileo BeiDou, которые фильтруют и усиливают навигационные сигналы, преобразовывают их в сигналы промежуточной частоты, в дальнейшем фильтруют на промежуточной частоте и квантуют в независимых каналах обработки сигналов СНС.
Выходы аналоговых трактов соединены с входами аналого-цифровых преобразователей, которые преобразовывают входные аналоговые сигналы в дискретные коды (цифровые сигналы).
Блок оперативной памяти и памяти программ хранит и обеспечивает работу программного обеспечения используемого для обработки навигационных сигналов.
Процессор общего назначения обеспечивает получение решения навигационной задачи и обслуживание интерфейсов разных потребителей.
Интерфейсный блок обеспечивает связь с внешними/внутренними устройствами.
Специализированный процессор вычисляет упрощенную модель движения НКА.
Энергонезависимая память хранит предварительно вычисленную ДКЭИ.
GSM/Wi-Fi модем соединяет навигационный приемник с ассистирующей сетью через сеть Internet.
Все блоки, входящие в навигационный приемник, связаны между собой шиной внутрисистемного обмена информацией.
Заявляемое устройство сокращает время получения приемником первого навигационного решения, обеспечивает возможность получения приемником навигационного решения в условиях навигационных сигналов низкой мощности (плотная городская застройка, наличие помех), обеспечивает возможность использования для получения приемником навигационного решения тех КА, в навигационных сообщениях которых по тем или иным причинам отсутствует эфемеридная информация.
Данное изобретение может быть использовано в мультисистемных приемниках спутниковой навигации (модулях), работающих по сигналам СНС и их функциональных дополнений с функцией долгосрочного прогноза оперативной ЭИ НКА СНС ГЛОНАСС, GPS, Galileo, BeiDou и др., например, в приемниках СН-5704 разработки ЗАО «КБ НАВИС». Помимо этого, изобретение может быть использовано для создания навигационных приемников с функцией оперативного контроля достоверности ЭИ, передаваемой НКА в составе навигационных сообщений, а также при создании средств автономного контроля оперативной ЭИ СНС ГЛОНАСС, GPS, Galileo, BeiDou и др.
Источники информации:
1. Сайт компании «Rx Networks» http://www.rxnetworks.com.
2. Сайт компании «Jet Propulsion Laboratory» http://www.gdqps.net:
3. Сайт компании «CSR» http://csr.com:
4. Сайт компании «u-blox» http://www.u-blox.com:
5. Сайт компании «Broadcom» http://www.broadcom.com:
6. Интерфейсный контрольный документ ГЛОНАСС, 2008;
7. Interface Control Document GPS, 1995;
8. Патент США №7612712 «Distributed orbit modeling and propagation method for a predicted and real-time assisted GPS system» фирмы RX Networks Inc.;
9. Патент США №8242956 «DISTRIBUTED ORBIT MODELING AND PROPAGATION METHOD FOR A PREDICTED AND REAL-TIME ASSISTED GPS SYSTEM»;
10. Патент РФ №2336631 «Способ программной обработки буферизованных выборок оцифрованных сигналов и мультисистемный многоканальный программный приемник реального времени сигналов спутниковых навигационных систем и систем их поддержек для его осуществления»;
11. Kaula W.М., Theory of Satellite Geodesy, Blaisdell, Waltham, Mass., 1966;
12. Tapley B.D., Watkins M.M and oth., The Joint Gravity Model 3, Journ. Geophys. Res., 1996, v.101, 1996.
13. Абалкин, Основы эфемеридной астрономии, 1979;
14. Tapley В.D., J.С. Ries, Orbit Determination Requirements for TOPEX, Proc. AAS/AIAA Astrodynamics Specialist Conference, Paper 87-429, Kalispell, 1987;
15. Боровицына T.B., Современные численные методы в задачах небесной механики, М., Наука, 1984;
16. Denis, D., McCarthy, IERS Technical Note 21 (IAU 1980 Theory), IERS Convention Center, US Naval Observatory, 1996;
17. Бахвалов H.С, Жидков H.П., Кобельков Г.Г., Численные методы, М., Лаборатория Базовых Знаний, 2000;
18. Интернет-сервер CDDIS ftp://cddis.qsfc.nasa.gov;
19. Интернет-сервер ftp://ftp.qlonass-iac.ru;
20. Интернет-сервер http://data.iers.org.
Изобретение относится к технике связи и может использоваться в системах навигации. Технический результат состоит в повышении точности и надежности решения потребителем навигационной задачи за счет возможности контроля оперативной эфемеридной информации, повышения скорости осуществления прогноза эфемеридной информации на навигационном оборудовании, обладающем малыми вычислительными ресурсами. Для этого в способе и устройстве обработки навигационных сигналов и определения местоположения используют долгосрочную компактную эфемеридную информацию при создании навигационных систем и оборудования, работающих по сигналам СНС ГЛОНАСС, GPS, Galileo, BeiDou и др. с поддержкой режимов сетевого и автономного ассистирования в части эфемеридной информации (ЭИ). В способе применяют сверхбольшие шаги интегрирования уравнений движения навигационных космических аппаратов. Система включает в свой состав навигационный приемник, включающий антенно-фидерное устройство, аналоговые радиоприемные тракты сигналов СНС GPS, ГЛОНАСС, Galileo, аналого-цифровые преобразователи, блок оперативной памяти и памяти программ, процессор общего назначения, интерфейсный блок, шины внутрисистемного обмена информацией, при этом навигационный приемник содержит аналоговый радиоприемный тракт сигналов системы BeiDou, процессор для вычисления упрощенной модели движения НКА, GSM/WiFi модем для сопряжения навигационного приемника с ассистирующей сетью через сеть Internet, энергонезависимую память для хранения предварительно вычисленной ДКЭИ, причем все блоки, входящие в навигационный приемник, связаны между собой шиной внутрисистемного обмена информацией, причем в состав ассистирующей сети входят сервер международной службы IGS, сервер международной службы IERS, сервер системы СВОЭВП и сервер ассистирующий сети, выходы серверов IGS, IERS и СВОЭВП связаны со входами сервера ассистирующей сети, выход сервера ассистирующей сети связан через сеть Internet со входом GSM/WiFi-модема навигационного приемника. 2 н. и 3 з.п. ф-лы, 1 ил., 2 табл.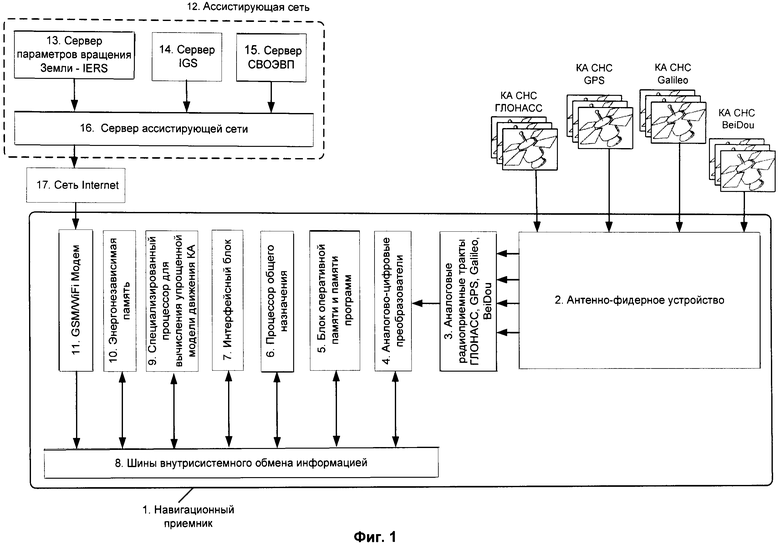
1. Способ обработки навигационных сигналов и определения местоположения с использованием долгосрочной компактной эфемеридной информации (ДКЭИ), заключающейся в формировании ДКЭИ на сервере ассистирующей сети или в навигационном приемнике на основе информации о положениях навигационных космических аппаратов (НКА) и их шкал времени и параметров вращения Земли, причем если ДКЭИ формируют на сервере, то ее передают в навигационный приемник при помощи сети Интернет и модема, в формировании эфемеридной информацию (ЭИ) на текущий момент времени на основе ДКЭИ и определении местоположения без использования ЭИ из навигационных сообщений, при этом, формат ЭИ, формируемой на основе ДКЭИ на текущий момент времени, соответствует интерфейсным контрольным документам спутниковых навигационных систем (СНС) GPS/ГЛОНАСС/Galileo, отличающийся тем, что ДКЭИ вычисляют на сервере ассистирующей сети на основании информации о положениях НКА и их ШВ на протяжении последних прошедших суток, загружаемой на сервер ассистирующей сети через сеть Internet с серверов организаций IGS (для СНС GPS, Galileo, BeiDou) и СВОЭВП (для СНС ГЛОНАСС), параметров вращения Земли на середину (на 12:00 часов) последних прошедших суток, загружаемых через сеть Internet с сервера международной службы вращения Земли (IERS), причем для получения ДКЭИ используется высокоточная модель движения НКА, использующая: высокоточную модель прецессии и нутации Земли, высокоточную модель притяжения Земли с учетом вариаций статических гармоник геопотенциала вследствие приливов поверхности, высокоточную модель движения Луны и Солнца, давление солнечного света с учетом теневых участков орбиты, метод интегрирования Эверхарта с малым шагом интегрирования (несколько десятков секунд); осуществляют вычисление ЭИ НКА СНС GPS/ГЛОНАСС/Galileo/BeiDou на текущий момент времени, причем используют упрощенную модель движения НКА, использующую: кусочно-линейную аппроксимацию модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд); вычисляют перечень видимых НКА, производят оценку доплеровских частот сигналов и с использованием полученной ЭИ на текущий момент времени осуществляют дальнейшие операции поиска, захвата, сопровождения принятых сигналов и определения местоположения потребителя без использования ЭИ, передаваемой в навигационных сообщениях СНС GPS/ГЛОНАСС/Galileo/BeiDou.
2. Способ по п. 1, в котором формируют ДКЭИ на основании информации о положениях НКА и их ШВ, содержащейся в информации навигационных сообщений НКА СНС GPS/ГЛОНАСС/Galileo/BeiDou, принятых навигационным приемником на протяжении последних прошедших суток, средние значения параметров вращения Земли, причем для получения ДКЭИ используется упрощенная модель движения НКА, использующая: кусочно-линейную аппроксимацию модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд); осуществляют вычисление эфемеридной информации НКА СНС GPS/ГЛОНАСС/Galileo/BeiDou на текущий момент времени, причем используют упрощенную модель движения НКА, использующую: кусочно-линейную аппроксимацию модели прецессии и нутации Земли, упрощенную модель притяжения Земли без учета вариаций статических гармоник геопотенциала вследствие приливов поверхности, упрощенную модель движения Луны и Солнца, давление солнечного света без учета теневых участков орбиты, метод интегрирования Эверхарта со сверхбольшим шагом интегрирования (несколько сотен секунд); вычисляют перечень видимых НКА, производят оценку доплеровских частот сигналов и с использованием полученной эфемеридной информации на текущий момент времени осуществляют дальнейшие операции поиска, захвата, сопровождения принятых сигналов и определения местоположения потребителя без использования ЭИ, передаваемой в навигационных сообщениях СНС GPS/ГЛОНАСС/Galileo/BeiDou.
3. Способ по п. 1 или 2, в котором осуществляют контроль достоверности ЭИ, принимаемой из навигационных сообщений, с помощью ЭИ, формируемой на основе ДКЭИ, на текущий момент времени.
4. Способ по п. 1 или 2, в котором ДКЭИ формируют путем следующих операций: загружают данные о положениях НКА в земной системе координат, о положениях ШВ НКА и параметрах вращения Земли на протяжении последних прошедших суток, далее с помощью метода наименьших квадратов для каждого НКА вычисляют уточненные значения параметров орбит 



ΔA(k)=A(k)-Am,
Δi(k)=i(k)-im
где k - номер НКА, A(k), i(k) - значения большой полуоси и наклонения орбиты k-го НКА соответственно, Am,im - средние значения большой полуоси и наклонения, которых определены для соответствующей СНС в целом, сохраняют параметры модели движения НКА в виде (ΔA, ε, Δi, Ω, ω, M, Cref), параметры ШВ НКА (а0, a1,) сохраняют без специальных преобразований, причем объем формируемой ДКЭИ составляет не более 1200 байт для 32 НКА GPS, не более 1000 байт для 24 НКА ГЛОНАСС, не более 1200 байт для 30 НКА Galileo и не более 1300 байт для 35 НКА BeiDou.
5. Устройство обработки навигационных сигналов и определения местоположения с использованием ДКЭИ, включающее навигационный приемник, включающий антенно-фидерное устройство, аналоговые радиоприемные тракты сигналов систем GPS, ГЛОНАСС, Galileo, аналого-цифровые преобразователи, блок оперативной памяти и памяти программ, процессор общего назначения, интерфейсный блок, шину внутрисистемного обмена информацией, отличающееся тем, что навигационный приемник включает аналоговый радиоприемный тракт сигналов СНС BeiDou, процессор для вычисления упрощенной модели движения НКА, GSM/WiFi модем для сопряжения навигационного приемника с ассистирующей сетью через сеть Internet, энергонезависимую память для хранения предварительно вычисленной ДКЭИ, причем все блоки, входящие в навигационный приемник, связаны между собой шиной внутрисистемного обмена информацией, причем в состав ассистирующей сети входят сервер международной службы IGS, сервер международной службы IERS, сервер системы СВОЭВП и сервер ассистирующий сети, выходы серверов IGS, IERS и СВОЭВП связаны со входами сервера ассистирующей сети, выход сервера ассистирующей сети связан через сеть Internet со входом GSM/WiFi-модема навигационного приемника.
| СПОСОБ ПРОГРАММНОЙ ОБРАБОТКИ БУФЕРИЗОВАННЫХ ВЫБОРОК ОЦИФРОВАННЫХ СИГНАЛОВ И МУЛЬТИСИСТЕМНЫЙ МНОГОКАНАЛЬНЫЙ ПРОГРАММНЫЙ ПРИЕМНИК РЕАЛЬНОГО ВРЕМЕНИ СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И СИСТЕМ ИХ ПОДДЕРЖЕК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2336631C2 |
| US 7612712 A, 24.01.2008 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |

