Изобретение относится к радиоэлектронике и может быть использовано, например, в мобильных комплексах обнаружения и сопровождения объектов с высокими массогабаритными показателями антенно-фидерной системы.
Известно устройство по патенту на изобретение РФ 2229670 (МПК7 F41G 3/00, F41G 5/06, F41G 7/00, опубл. 27.06.2004), обеспечивающее обнаружение, сопровождение, обработку координат различных наземных, наводных и воздушных целей. В состав устройства входят азимутальный и угломестный следящие приводы наведения, механически связанные соответственно с азимутальным и угломестным рабочими органами и содержащие датчики углового положения и цифровые блоки управления каждого из следящих приводов.
Быстродействие в указанном устройстве достигается благодаря введению дополнительного устройства обнаружения (инфракрасной системы кругового обзора) с собственным азимутальным приводом. Однако в РЛС обнаружения и сопровождения, обеспечивающей требуемое усиление при высоком разрешении по угловым координатам, обзор и сопровождение ИРИ производится, как правило, одной и той же антенно-фидерной системой (АФС). Это связано со значительными массогабаритными показателями узконаправленной АФС и приемной аппаратуры. При этом должна быть обеспечена высокая скорость в режиме обзора, а также работа на малой скорости и высокая точность отработки в режимах автосопровождения и наведения.
Задача изобретения - расширение диапазона регулирования скорости и повышение точности в режимах наведения и автосопровождения при высоком быстродействии, малых габаритах устройства.
Технический результат достигается тем, что в устройстве наведения по направлению (УНН), содержащем устройство наведения по азимуту (УН β) в составе опорно-поворотного устройства, блока управления по азимуту и датчика углового положения β, устройство наведения по углу места (УН ε) в составе блока управления по углу места и датчика углового положения ε и платформу, устройство наведения по азимуту УН β содержит датчик углового положения β1 и гидроблок β в составе агрегата большого расхода, регулятора скорости привода грубого перемещения, гидрораспределителя грубого перемещения, гидрораспределителя точного подвода, гидрораспределителя долевой подачи и блока долевой подачи, опорно-поворотное устройство содержит привод грубого перемещения, закрепленный на траверсе, соединенной с приводом точного подвода, который соединен со ступицей, причем ступица с траверсой закреплены на одной оси, а траверса размещена внутри корпуса ступицы, при этом блок управления по азимуту подключен к регулятору скорости привода грубого перемещения, гидрораспределителю грубого перемещения, гидрораспределителю точного подвода, гидрораспределителю долевой подачи, агрегат большого расхода через регулятор скорости привода грубого перемещения и гидрораспределитель грубого перемещения подключен к приводу грубого перемещения, гидрораспределитель точного подвода подключен к приводу точного перемещения, гидрораспределитель долевой подачи через блок долевой подачи подключен к приводу точного перемещения, который через ступицу подключен к платформе, траверса через датчик углового положения β1, а ступица через датчик углового положения β соединены с блоком управления по азимуту, а устройство наведения по углу места УН ε содержит привод угла места и гидроблок ε в составе агрегата малого расхода, регулятора скорости малого расхода, гидрораспределителя привода ε, причем блок управления по углу места подключен к регулятору скорости малого расхода и гидрораспределителю привода ε, агрегат малого расхода через регулятор скорости малого расхода подключен к гидрораспределителю точного подвода, гидрораспределителю долевой подачи и через гидрораспределитель привода ε и привод угла места - к платформе, которая через датчик углового положения ε подключена к блоку управления по углу места.
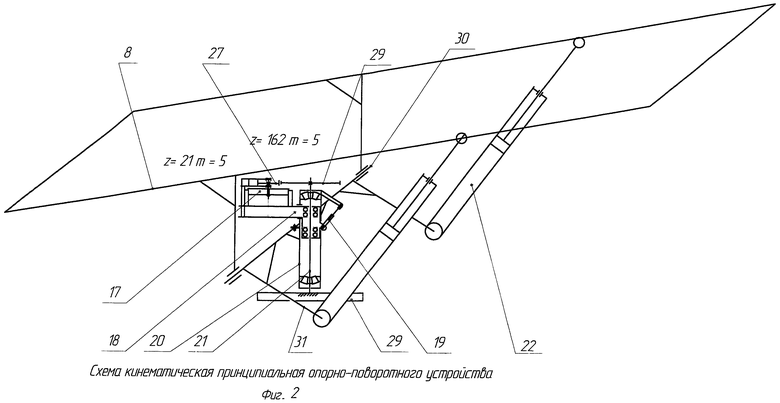
На фиг.1 изображена блок-схема устройства наведения по направлению.
На фиг.2 изображена кинематическая принципиальная схема опорно-поворотного устройства (ОПУ).
На фиг.3 изображено опорно-поворотное устройство с платформой.
На фиг.4 изображено сечение по А-А ОПУ.
Устройство наведения по направлению содержит устройство наведения по азимуту 1 в составе опорно-поворотного устройства 2, блока управления по азимуту 3 и датчика углового положения β 4, устройство наведения по углу места 5 в составе блока управления по углу места 6 и датчика углового положения ε 7, и платформу 8, устройство наведения по азимуту 1 содержит датчик углового положения β1 9, гидроблок β 10, в состав которого входит агрегат большого расхода 11, регулятор скорости привода грубого перемещения 12, гидрораспределитель грубого перемещения 13, гидрораспределитель точного подвода 14, гидрораспределитель долевой подачи 15, блок долевой подачи 16. В состав опорно-поворотного устройства 2 входит привод грубого перемещения 17, закрепленный на траверсе 18, соединенной с приводом точного перемещения 19, который соединен со ступицей 20. Ступица 20 с траверсой 18 закреплены на одной оси 21, а траверса 18 размещена внутри корпуса ступицы 20. Блок управления по азимуту 3 подключен к регулятору скорости привода грубого перемещения 12, гидрораспределителю грубого перемещения 13, гидрораспределителю точного подвода 14, гидрораспределителю долевой подачи 15. Агрегат большого расхода 11 через регулятор скорости привода грубого перемещения 12 и гидрораспределитель грубого перемещения 13 подключен к приводу грубого перемещения 17. Гидрораспределитель точного подвода 14 подключен к приводу точного перемещения 19, гидрораспределитель долевой подачи 15 через блок долевой подачи 16 подключен к приводу точного перемещения 19, который через ступицу 20 подключен к платформе 8, траверса 18 через датчик углового положения β1 9, а ступица 20 через датчик углового положения β 4 соединены с блоком управления по азимуту 3. Устройство наведения по углу места 5 содержит привод угла места 22 и гидроблок ε 23 в составе агрегата малого расхода 24, регулятора скорости малого расхода 25 и гидрораспределителя привода ε 26, причем блок управления по углу места 6 подключен к регулятору скорости малого расхода 25 и гидрораспределителю привода ε 26, агрегат малого расхода 24 через регулятор скорости малого расхода 25 подключен к гидрораспределителю точного подвода 14, гидрораспределителю долевой подачи 15 и через гидрораспределитель привода ε 26 и привод угла места 22 - к платформе 8, которая через датчик углового положения ε 7 подключена к блоку управления по углу места 6.
Привод β грубого перемещения 17 выполнен на основе гидромотора и обеспечивает реверсивное вращение по азимуту с максимальной скоростью.
Регулятор скорости привода грубого перемещения 12 обеспечивает пропорциональное регулирование скорости гидромотора в небольшом диапазоне (ориентировочно 1:6) и может быть использован как для работы на пониженной скорости, так и для улучшения динамики работы азимутального привода.
Привод точного перемещения 19 и привод угла места 22 выполнены на основе гидроцилиндров, обеспечивающих перемещение с малой скоростью и требуемую точность позиционирования в ограниченном диапазоне углов.
Блок долевой подачи предназначен для дискретного управления приводом точного перемещения 19.
Датчики углового положения 4, 7 и 9 могут быть выполнены, например, на базе датчика - преобразователя ДП-2М с блоком опроса.
Гидрораспределители 13, 14, 15 и 26 выполнены с релейным управлением и обеспечивают переключение направления вращения соответствующего привода.
Агрегаты большого 11 и малого 24 расхода являются насосами, выполненными на основе трехфазного асинхронного электродвигателя с питанием от промышленной сети переменного тока.
Платформа 8 обеспечивает перемещение размещаемой на ней, в частности, антенно-фидерной системы по углу места в заданном диапазоне углов.
Опорно-поворотное устройство 2 обеспечивает вращение по азимуту платформы 8 с установленной на ней антенно-фидерной системой и другой аппаратурой.
Опорно-поворотное устройство 2 содержит два последовательно соединенных привода: грубого перемещения 17 и точного перемещения 19, соединенных последовательно, причем траверса 18 расположена внутри ступицы 20 и оба этих устройства размещены на одной оси 21, что позволяет при ограниченных габаритах размещения установить два азимутальных привода.
На оси привода грубого перемещения 17 закреплена зубчатая шестерня 27, взаимодействующая с неподвижно закрепленным на оси 21 зубчатым колесом 28. Ось 21 закреплена на основании 29, установленном на шасси автомобиля.
На осях 30 закреплены два рычага 31, на которых закреплены два цилиндра привода угла места 22.
Устройство работает следующим образом. Агрегаты большого 11 и малого 24 расхода обеспечивают подвод рабочей жидкости к регуляторам скорости 12 и 25. В режиме наведения по азимуту вначале включается привод грубого перемещения 17, для чего блок управления по азимуту 3 формирует сигнал управления скоростью, поступающий на регулятор скорости 12, который за время пуска обеспечивает плавное увеличение давления. Одновременно формируется сигнал направления вращения, который поступает на вход гидрораспределителя 13. В результате происходит плавный пуск гидромотора привода грубого перемещения 17 на максимальную скорость. Зубчатая шестерня 27 привода грубого перемещения 17 перекатывается по венцу неподвижного колеса 28, и вся система перемещается по азимуту. Датчик углового положения β 4 выдает код текущего положения в блок управления по азимуту 3. При достижении опорно-поворотным устройством 2 заданного положения с погрешностью Δ β≈2°, сигналом на входе регулятора скорости 12 снижают скорость, снимают сигнал с входа гидрораспределителя 13 и подают максимальный сигнал управления скоростью на регулятор скорости 25, а на вход гидрораспределителя 14 подают сигнал направления вращения. Гидрораспределитель 14 управляет приводом точного перемещения 19, который через ступицу 20 перемещает опорно-поворотное устройство 2 с платформой 8 в ограниченном диапазоне углов. Привод точного перемещения 19 имеет номинальную скорость ниже, чем у привода грубого перемещения 17, но обеспечивает более высокую точность позиционирования опорно-поворотного устройства 2 (Δ β≈0,5°). При необходимости работы на пониженной скорости, например, в режиме секторного поиска или автосопровождения, на вход соответствующего регулятора скорости 12 или 25 выдают сигнал управления скоростью. При поступлении управляющего сигнала от блока управления по азимуту 3 на гидрораспределитель 15 поступает питание в блок долевой подачи 16, который выдает порцию гидравлической жидкости в гидроцилиндр привода точного перемещения 19, перемещающий ступицу 20 на фиксированный угол (Δ β≈0,1°). В результате обеспечивается дискретное управление приводом точного перемещения для точного позиционирования или в режиме дискретного автосопровождения по азимуту объекта, движущегося с малой скоростью.
Для управления приводом угла места 22 используется агрегат малого расхода 24. Блок управления по углу места 6 формирует сигналы управления, поступающие на регулятор скорости 25 и гидрораспределитель 26, аналогично тому, как было описано выше. Гидравлическая жидкость с гидрораспределителя 26 поступает на гидроцилиндры привода угла места 22, который перемещает платформу 8 в заданное положение в диапазоне углов ε. Датчик углового положения по углу места 7 обеспечивает выдачу соответствующей информации в блок управления по углу места 6.
Технический результат - расширение диапазона регулирования скорости и повышение точности в режимах наведения и автосопровождения при высоком быстродействии и малых габаритах устройства достигается следующим образом.
Благодаря использованию привода грубого перемещения на основе мощного гидромотора с пропорциональным регулятором скорости обеспечивается перемещение опорно-поворотного устройства и платформы с установленной на ней антенно-фидерной системой и другой аппаратурой с высокими скоростями, например для наведения в заданное положение с максимальным быстродействием или в режимах кругового обзора и обзора в больших секторах. Применение привода точного перемещения с пропорциональным регулятором скорости еще более расширяет диапазон регулирования скорости УНН в сторону малых значений, например, для режимов автосопровождения или поиска в малых секторах и, кроме того, обеспечивает высокую точность позиционирования в режиме наведения. Наконец, применение блока долевой подачи дает возможность отработки малых перемещений с высокой точностью, что может быть использовано при дискретном автосопровождении объектов, имеющих малую угловую скорость. Конструктивное решение, при котором траверса привода точного перемещения расположена внутри ступицы привода грубого перемещения, позволяет разместить оба азимутальных привода в ограниченных габаритах УНН передвижной РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления опорно-поворотными устройствами антенной установки | 2024 |
|
RU2822869C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ НАВЕДЕНИЯ ОПТИЧЕСКОГО ПРИЦЕЛА НА ЦЕЛЬ | 2001 |
|
RU2217681C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| БОЕВАЯ МАШИНА | 2003 |
|
RU2244242C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |


Изобретение относится к радиоэлектронике и может быть использовано в передвижных радиолокационных станциях обнаружения и сопровождения с высокими массогабаритными показателями антенно-фидерной системы. Технический результат - расширение диапазона регулирования скорости и повышение точности. Для достижения данного результата устройство наведения по направлению (УНН) содержит устройство наведения по азимуту (УН β), устройство наведения по углу места (УН ε) и платформу. УН β выполнено на основе гидроприводов грубого и точного перемещения, причем привод грубого перемещения расположен внутри корпуса привода точного перемещения, что позволило уменьшить габариты опорно-поворотного устройства (ОПУ). Блок управления по азимуту, в соответствии с командами заданного режима и сигналами датчика углового положения β, осуществляет управление гидромотором привода грубого перемещения и гидроцилиндрами привода точного перемещения. Гидропривод точного перемещения имеет дополнительный режим дискретного управления, который позволяет повысить точность отработки заданного положения. УН ε содержит датчик углового положения ε и блок управления по углу места, который осуществляет управление гидроцилиндрами привода угла места, механически связанного с платформой. 4 ил.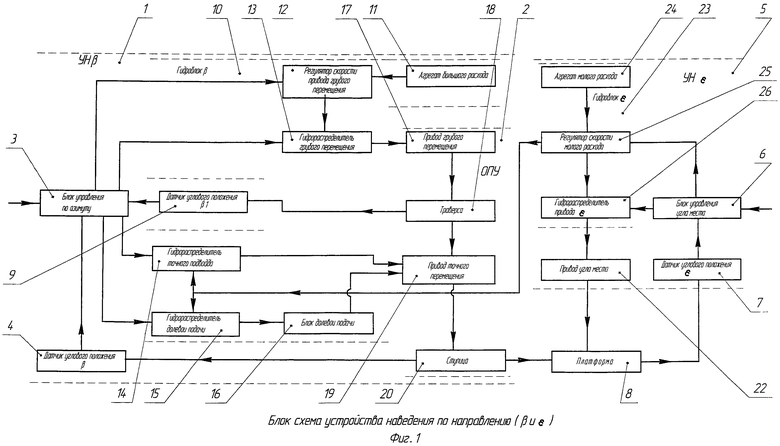
Устройство наведения по направлению (УНН), содержащее устройство наведения по азимуту (УН β), в составе опорно-поворотного устройства, блока управления по азимуту и датчика углового положения β, устройство наведения по углу места (УН ε) в составе блока управления по углу места и датчика углового положения ε и платформу, отличающееся тем, что устройство наведения по азимуту УН β содержит датчик углового положения β1 и гидроблок β в составе агрегата большого расхода, регулятора скорости привода грубого перемещения, гидрораспределителя грубого перемещения, гидрораспределителя точного подвода, гидрораспределителя долевой подачи и блока долевой подачи, опорно-поворотное устройство содержит привод грубого перемещения, закрепленный на траверсе, соединенной с приводом точного перемещения, который соединен со ступицей, причем ступица с траверсой закреплены на одной оси, а траверса размещена внутри корпуса ступицы, при этом блок управления по азимуту подключен к регулятору скорости привода грубого перемещения, гидрораспределителю грубого перемещения, гидрораспределителю точного подвода, гидрораспределителю долевой подачи, агрегат большого расхода через регулятор скорости привода грубого перемещения и гидрораспределитель грубого перемещения подключен к приводу грубого перемещения, гидрораспределитель точного подвода подключен к приводу точного перемещения, гидрораспределитель долевой подачи через блок долевой подачи подключен к приводу точного перемещения, который через ступицу подключен к платформе, траверса через датчик углового положения β1, а ступица через датчик углового положения β соединены с блоком управления по азимуту, а устройство наведения по углу места УН ε содержит привод угла места и гидроблок ε в составе агрегата малого расхода, регулятора скорости малого расхода, гидрораспределителя привода ε, причем блок управления по углу места подключен к регулятору скорости малого расхода и гидрораспределителю привода ε, агрегат малого расхода через регулятор скорости малого расхода подключен к гидрораспределителю точного подвода, гидрораспределителю долевой подачи и через гидрораспределитель привода ε и привод угла места - к платформе, которая через датчик углового положения ε подключена к блоку управления по углу места.
| СИСТЕМА НАВЕДЕНИЯ ОБЪЕКТА ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2229670C1 |
| Устройство для отсчета уровня воды | 1936 |
|
SU49294A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД МЕХАНИЗМА ГОРИЗОНТАЛЬНОГО НАВЕДЕНИЯ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2007 |
|
RU2340857C2 |
| US 4440061 A, 03.04.1984 | |||
| СПОСОБ ОСВОЕНИЯ СКВАЖИНЫ | 1998 |
|
RU2127805C1 |
| GB 1064774 A, 12.04.1967. | |||

