Настоящее изобретение относится к области движителей, и, более конкретно, касается движителя с применением ускоряющих масс, а также способа перемещения объекта с помощью указанного движителя.
Из уровня техники известен способ перемещения системы масс в пространстве, заключающийся в перемещении разных по величине масс друг относительно друга под действием сил их взаимодействия и инерции, в результате чего центр масс переносится в сторону движения большей массы (RU 98102898).
Недостаток указанного способа состоит в том, что он не позволяет системе масс перемещаться в одном направлении постоянно (возврат масс при таком подходе неминуем) и, кроме того, нет возможности поддерживать баланс замкнутой системы сил неизменным.
Задача настоящего изобретения состоит в разработке движителя, позволяющего реализовать постоянное однонаправленное шаговое перемещение без изменения баланса системы сил движителя.
Кроме того, задача настоящего изобретения состоит в расширении области применения устройств для перемещения.
Одним объектом изобретения является движитель с использованием ускоряющих масс, содержащий основание, выполненное с возможностью закрепления на корпусе перемещаемого объекта, жестко закрепленную на основании замкнутую диэлектрическую полую трубку с двумя удлиненными и параллельными друг другу сторонами, содержащую внутри себя множество цельных магнитных масс с возможностью перемещения размещенными на трубке через равные промежутки электромагнитами, управляемыми коммутатором, питаемым от источника питания.
Другим объектом изобретения является способ перемещения объекта с помощью закрепленного на нем движителя с использованием ускоренного перемещения масс, закрепленных на перемещаемом (движимом) объекте. Способ предусматривает однонаправленное, с чередующимся ускорением и замедлением перемещение массы из начальной точки в конечную точку вдоль прямой линии перемещения массы между этими точками, при этом перемещаемая масса связана с движимым объектом. В результате чередования ускорения и замедления массы на пути ее перемещения между точками движимый объект изменяет свое положение в пространстве вдоль прямой линии перемещения массы и направлении, противоположном направлению перемещения массы. Каждая следующая дискретная (элементарная) масса, подошедшая к конечной точке, возвращается к начальной точке в составе системы других аналогичных дискретных масс с образованием силовой связи между каждой из масс системы, т.е. образуют связанную цепочку дискретных масс (твердых единичных масс, однородный столб жидкости, газа, плазмы). Данная цепочка дискретных масс расположена вдоль прямой линии (параллельна ей), соединяющей начальную и конечную точки перемещения массы таким образом, что проекции векторов ускорений масс цепочки на эту прямую линию равны по величине, но противоположны по направлению на концах цепочки дискретных масс и компенсируют друг друга. Путем синхронной подмены равных дискретных масс на концах цепочки достигается обратное перемещение массы из конечной точки в начальную без образования импульса при постоянной скорости движения масс цепочки по всей ее длине. Импульс, образующийся при разгоне и торможении цепочки масс (для приведения ее в рабочее состояние), устраняется за счет других способов, например производится синхронное изменение сечения столба жидкости, газа, плазмы по всей его длине, выполняющего роль цепочки дискретных масс, либо производится принудительное затормаживание перемещаемого объекта в момент разгона цепочки масс.
Краткое описание чертежей
Фиг.1 - вид в перспективе движителя по изобретению;
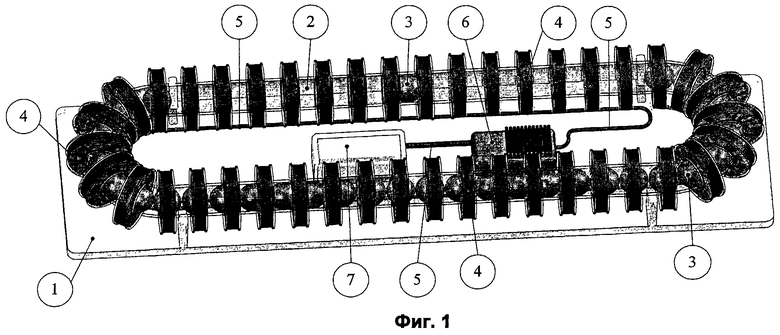
Фиг.2 - диаграммы скоростей и ускорений перемещения масс-сфер;
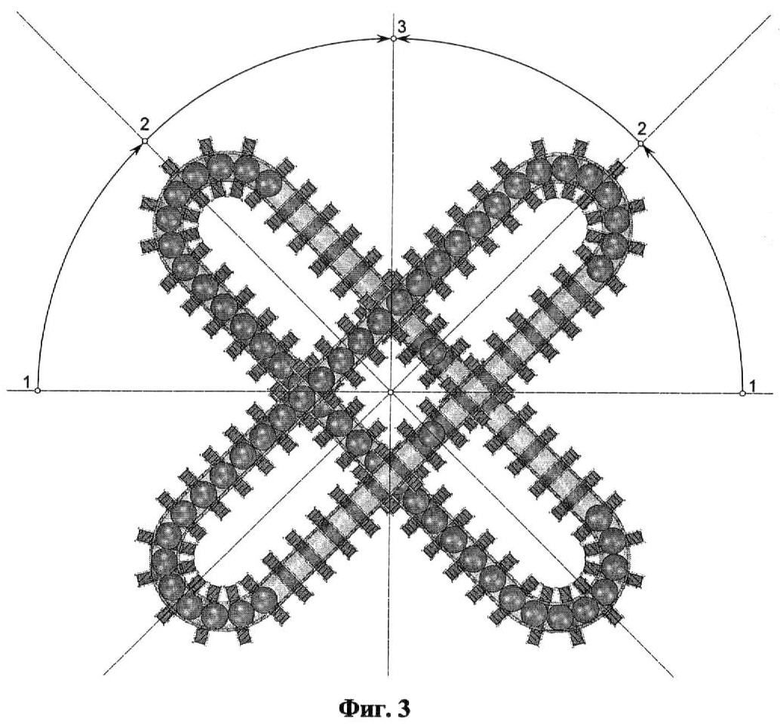
Фиг.3 - вид сверху движителей по Фиг.1.
Подробное описание изобретения
Со ссылкой на Фиг.1 показано устройство, основание 1 которого закреплено на корпусе перемещаемого объекта. На основании 1 жестко закреплена замкнутая полая трубка 2 из диэлектрического материала. В трубке 2 помещено множество цельных масс 3 в виде сфер из магнитного материала. На трубке 2 нанизаны через равные расстояния электромагниты 4. Включением и выключением электромагнитов 4 управляет коммутатор 6. Коммутатор 6 реализует заданный алгоритм переключения электромагнитов 4, который описан более подробно ниже. Создаваемое электромагнитами 4 магнитное поле перемещает массы-сферы 3 внутри трубки 2. Электромагниты 4 должны располагаться на минимальном расстоянии друг от друга и обеспечивать максимальную плавность перемещения масс-сфер 3. Источник питания 7 снабжает электроэнергией коммутатор 6 и электромагниты 4 через линии питания 5.
Электромагниты коммутируются таким образом, что массы-сферы всегда вплотную заполняют трубку на отрезках D-E-F-G-A-B и реализуют на данных отрезках равномерное и непрерывное (относительно стенок трубки) перемещение цепочки масс-сфер (Фиг.2). На отрезке В-С электромагниты реализуют движение массы-сферы с положительным ускорением, а на отрезке C-D - с отрицательным ускорением, при этом ускорения равны по модулю. Длины отрезков В-С и C-D равны. Между точками В и D всегда находится только одна масса-сфера. Массы-сферы перемещаются внутри трубки по часовой стрелке, по направлению вектора скорости  .
.
Спроецируем вектор скорости перемещения масс-сфер внутри трубки  на ось x, обозначим его как
на ось x, обозначим его как  . Связанные со скоростью проекции ускорений масс-сфер на ось x обозначим как
. Связанные со скоростью проекции ускорений масс-сфер на ось x обозначим как  . Приведенные на Фиг.2 диаграммы показывают изменение проекции скорости масс-сфер
. Приведенные на Фиг.2 диаграммы показывают изменение проекции скорости масс-сфер  и изменение проекции ускорения масс-сфер
и изменение проекции ускорения масс-сфер  в зависимости от координаты масс-сфер на оси x. На верхней по схеме диаграмме показаны изменения вектора и вектора , возникающие при перемещении масс от точки А до точки Е. На нижней по схеме диаграмме - в обратном направлении, от Е до А.
в зависимости от координаты масс-сфер на оси x. На верхней по схеме диаграмме показаны изменения вектора и вектора , возникающие при перемещении масс от точки А до точки Е. На нижней по схеме диаграмме - в обратном направлении, от Е до А.
Цепочки масс-сфер на отрезках G-A-B, D-E-F движутся равномерно и непрерывно относительно стенок трубки. Поскольку трубка на данных отрезках изогнута, то проекции вектора скорости масс-сфер 

 и
и  на ось x порождают и соответствующие проекции ускорений
на ось x порождают и соответствующие проекции ускорений 

 и
и  . На отрезках G-A-B и D-E-F в единицу времени всегда располагается равное количество одинаковых масс-сфер, а значит образующиеся силы (второй закон Ньютона)
. На отрезках G-A-B и D-E-F в единицу времени всегда располагается равное количество одинаковых масс-сфер, а значит образующиеся силы (второй закон Ньютона)  и
и  . Т.е. вектора этих сил равны по модулю,
. Т.е. вектора этих сил равны по модулю,
но противоположны по направлению, они компенсируют друг друга. Цепочка масс-сфер на отрезке F-G движется равномерно и непрерывно. Проекция вектора скорости  на ось x величина постоянная. Ускорения и связанной с ним силы не образуется.
на ось x величина постоянная. Ускорения и связанной с ним силы не образуется.
Таким образом, движущаяся цепочка масс-сфер на отрезках D-E-F-G-A-B не оказывает влияние на баланс замкнутой системы сил.
Цепочка масс-сфер позволяет реализовать непрерывное перемещение масс из точки D в точку В без изменения баланса замкнутой системы сил движителя в любом интервале времени, исключая момент начала и окончания движения цепочки. Разгон цепочки масс при начале работы движителя и ее торможение - при окончании работы движителя порождает продольные ускорения, оказывающие влияние на баланс замкнутой системы сил движителя. Если необходимо исключить (скомпенсировать) данные ускорения, возможно применение способа компенсации ускорения цепочки масс при начале и окончании работы движителя. Один из возможных вариантов такого способа описывается ниже.
Рабочий цикл движителя начинается, когда очередная в цепочке масса-сфера оказывается в точке В. Электромагниты реализуют движение массы-сферы от точки В до точки С за время tB-C с постоянным положительным ускорением  (Фиг.2). При этом возникает сила
(Фиг.2). При этом возникает сила  где m - масса одной перемещаемой сферы. Действие силы
где m - масса одной перемещаемой сферы. Действие силы  продолжается время tB-C, за это время реактивная сила
продолжается время tB-C, за это время реактивная сила  равная
равная  придает ускорение частям движителя в направлении ее действия, и перемещает относительный центр масс движителя из положения cg1 в положение cg2.
придает ускорение частям движителя в направлении ее действия, и перемещает относительный центр масс движителя из положения cg1 в положение cg2.
Скорость движения массы-сферы  достигает максимума в точке С. Затем электромагниты в течение времени tC-D реализуют движение массы-сферы от точки С до точки D с постоянным отрицательным ускорением
достигает максимума в точке С. Затем электромагниты в течение времени tC-D реализуют движение массы-сферы от точки С до точки D с постоянным отрицательным ускорением  . Происходит обратный, описанному выше процесс: возникает сила
. Происходит обратный, описанному выше процесс: возникает сила  где m - масса одной перемещаемой сферы. За время tC-D реактивная сиа
где m - масса одной перемещаемой сферы. За время tC-D реактивная сиа  , равная
, равная  , погашает приданное ранее центру масс движителя силой
, погашает приданное ранее центру масс движителя силой  ускорение. За время tC-D относительный центр масс движителя перемещается из положения cg2 в положение cg3. Время tB-C всегда равно tC-D, и
ускорение. За время tC-D относительный центр масс движителя перемещается из положения cg2 в положение cg3. Время tB-C всегда равно tC-D, и  равны по модулю, но противоположны по направлению, суммарный импульс движителя остается неизменным, а его относительный центр масс за один цикл перемещается на расстояние L.
равны по модулю, но противоположны по направлению, суммарный импульс движителя остается неизменным, а его относительный центр масс за один цикл перемещается на расстояние L.
К началу следующего цикла позиция сg3 приравнивается к позиции cg1 и цикл повторяется - движитель совершает непрерывное шаговое перемещение.
В практических целях определим величину перемещения центра масс за один цикл L и скорость перемещения движителя.
Предположим, основание 1 движителя (Фиг.1) снабжено четырьмя колесами, которые опираются на ровную горизонтальную поверхность. Колеса, узел их крепления и поверхность сконструированы так, чтобы обеспечивать минимальное трение при перемещении движителя в указанных на Фиг.2 направлениях перемещения центра масс eg. В процессе расчетов пренебрежем силой трения и силой сопротивления воздуха ввиду их малых величин.
Цепочки масс-сфер на отрезках G-A-B, D-E-F и F-G движутся равномерно и непрерывно относительно стенок трубки со скоростью  На отрезках G-A-B и D-E-F в единицу времени всегда располагается равное количество одинаковых масс-сфер, а значит силы
На отрезках G-A-B и D-E-F в единицу времени всегда располагается равное количество одинаковых масс-сфер, а значит силы  и . На отрезке F-G цепочка масс-сфер движется равномерно и непрерывно и не оказывает влияние на баланс замкнутой системы сил.
и . На отрезке F-G цепочка масс-сфер движется равномерно и непрерывно и не оказывает влияние на баланс замкнутой системы сил.
Определим силу по формуле:  где m - масса одной перемещаемой сферы, а
где m - масса одной перемещаемой сферы, а  ускорение этой массы при движении между соответствующими точками.
ускорение этой массы при движении между соответствующими точками.
Далее определим время действия силы . Обозначим искомую величину как tB-C. Воспользуемся формулой перемещения при равноускоренном движении:  где
где  - расстояние (перемещение) между точками В и С. Выразим требуемую величину tB-C из этой формулы.
- расстояние (перемещение) между точками В и С. Выразим требуемую величину tB-C из этой формулы.
Затем определим, какое ускорение частям движителя придаст сила . Применим формулу зависимости силы от массы и ускорения с позиции того, что силе будет соответствовать реактивная противодействующая сила , устремляющая движитель влево по схеме (Фиг.2).
 где M - масса движителя с учетом всех составляющих, необходимых для автономного перемещения по горизонтальной поверхности (за исключением рабочей массы m),
где M - масса движителя с учетом всех составляющих, необходимых для автономного перемещения по горизонтальной поверхности (за исключением рабочей массы m),  - приданое движителю ускорение реактивной силой
- приданое движителю ускорение реактивной силой  Выразим требуемую величину
Выразим требуемую величину  из этой формулы.
из этой формулы.
Воспользовавшись той же формулой перемещения при равноускоренном движении, можно определить перемещение, которое проходит движитель под действием силы Это перемещение равно
Это перемещение равно 
Аналогичным образом сила  порождает реактивную противодействующую силу
порождает реактивную противодействующую силу  Поскольку ускорения
Поскольку ускорения  и
и  равны по величине, но противоположны по направлению, действуют одно и тоже время (tB-C=tC-D), расстояния В-С и C-D равны, масса движителя неизменна и направление скорости не изменяется, то перемещение
равны по величине, но противоположны по направлению, действуют одно и тоже время (tB-C=tC-D), расстояния В-С и C-D равны, масса движителя неизменна и направление скорости не изменяется, то перемещение  , которое проходит движитель под действием затормаживающей движитель силы
, которое проходит движитель под действием затормаживающей движитель силы  равно перемещению
равно перемещению  которое движитель прошел под действием разгоняющей силы , т.е. движитель пройдет тот же путь за время торможения движителя.
которое движитель прошел под действием разгоняющей силы , т.е. движитель пройдет тот же путь за время торможения движителя.
Исходя из этого, расстояние перемещения движителя за один такт можно выразить как:
Выполнив подстановки и алгебраические преобразования получим формулу определения расстояния перемещения движителя за один такт, справедливую для описанной конструкции движителя:
Скорость перемещения движителя при постоянных параметрах  ,
,  , M и m зависит только от времени одного такта, равного 2tB-C (выражается из формулы перемещения при равноускоренном движении), и частоты повторения тактов. Если такты повторяются непрерывно, один за другим, скорость перемещения в метрах в секунду можно определить по формуле:
, M и m зависит только от времени одного такта, равного 2tB-C (выражается из формулы перемещения при равноускоренном движении), и частоты повторения тактов. Если такты повторяются непрерывно, один за другим, скорость перемещения в метрах в секунду можно определить по формуле:
Таким образом, при заданных параметрах:  , m=0,045 кг, М=4,4 кг и
, m=0,045 кг, М=4,4 кг и 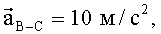 величина L=0,0041 м, а величина V=0,01025 м/с.
величина L=0,0041 м, а величина V=0,01025 м/с.
В целях компенсации продольных ускорений движителя при начале и окончании его работы (разгон и торможение цепочки масс) может быть применен следующий метод.
Используются два идентичных движителя по Фиг.1, указанные движители жестко закреплены на перемещаемом объекте. Движители могут вращаться вокруг своих центров на 90°, как показано на Фиг.3.
В положении 1 оси двух движителей параллельны и движители располагаются симметрично друг другу (все их части противоположны). Движители начинают синхронно разгонять массы-сферы по описанному выше алгоритму. Поскольку движители располагаются симметрично, направления движения масс-сфер противоположны, а следовательно, противоположны ускорения цепочек масс D-E-F-G-A-B (Фиг.2) - все возникающие силы компенсируют друг друга. В положении 1 замкнутая система сил движителя сбалансирована. После того как достигнута необходимая (рабочая) скорость перемещение масс-сфер, движители плавно поворачиваются из положения 1 в положение 3. Положение 2 показано как промежуточное в целях наглядности. В положении 3 векторы перемещения двух движителей складываются - рабочее положение движителей. Окончание работы движителя происходит в обратном порядке: из положения 3 движители поворачиваются в положение 1, затем массы-сферы синхронно останавливаются, не нарушая баланса замкнутой системы сил.
Перечень позиций
1. Основание
2. Замкнутая полая трубка
3. Массы
4. Электромагниты
5. Линия питания
6. Коммутатор
7. Источник питания.
Изобретения относятся к движителям с применением ускоряющих масс. Движитель содержит основание, выполненное с возможностью закрепления на корпусе перемещаемого объекта, жестко закрепленную на основании замкнутую диэлектрическую полую трубку с двумя удлиненными и параллельными друг другу сторонами. Трубка содержит внутри себя множество цельных магнитных масс с возможностью перемещения размещенными на трубке через равные промежутки электромагнитами, управляемыми коммутатором, питаемым от источника питания. Способ перемещения объекта с помощью закрепленного на нем движителя с использованием ускоренного перемещения масс включает однонаправленное с чередующимся ускорением и замедлением перемещение массы, связанной с движимым объектом, из начальной в конечную точку вдоль прямой линии перемещения массы между этими точками. В результате чередования ускорения и замедления массы на пути ее перемещения между точками движимый объект изменяет свое положение в пространстве вдоль прямой линии перемещения массы и направлении, противоположном направлению перемещения массы. Каждая следующая дискретная масса, подошедшая к конечной точке, возвращается к начальной точке в составе системы других аналогичных дискретных масс с образованием силовой связи между каждой из масс системы, образуя связанную цепочку дискретных масс. Достигается разработка движителя, позволяющего реализовать постоянное однонаправленное шаговое перемещение без изменения баланса системы сил движителя. 2 н.з. ф-лы, 3 ил.
1. Движитель с использованием ускоряющих масс, содержащий основание, выполненное с возможностью закрепления на корпусе перемещаемого объекта, жестко закрепленную на основании замкнутую диэлектрическую полую трубку с двумя удлиненными и параллельными друг другу сторонами, содержащую внутри себя множество цельных магнитных масс с возможностью перемещения размещенными на трубке через равные промежутки электромагнитами, управляемыми коммутатором, питаемым от источника питания.
2. Способ перемещения объекта с помощью закрепленного на нем движителя с использованием ускоренного перемещения масс, закрепленных на перемещаемом (движимом) объекте, включающий однонаправленное, с чередующимся ускорением и замедлением перемещение массы, связанной с движимым объектом, из начальной в конечную точку вдоль прямой линии перемещения массы между этими точками, отличающийся тем, что в результате чередования ускорения и замедления массы на пути ее перемещения между точками движимый объект изменяет свое положение в пространстве вдоль прямой линии перемещения массы и направлении, противоположном направлению перемещения массы, причем каждая следующая дискретная (элементарная) масса, подошедшая к конечной точке, возвращается к начальной точке в составе системы других аналогичных дискретных масс с образованием силовой связи между каждой из масс системы, образуя связанную цепочку дискретных масс (твердых единичных масс, однородный столб жидкости, газа, плазмы), расположенную вдоль прямой линии (параллельную ей), соединяющей начальную и конечную точки перемещения массы, таким образом, что проекции векторов ускорений масс цепочки на эту прямую линию равны по величине, но противоположны по направлению на концах цепочки масс и компенсируют друг друга, при этом за счет синхронной подмены равных масс на концах цепочки достигается обратное перемещение массы из конечной точки в начальную без образования импульса при постоянной скорости движения цепочки масс по всей ее длине, импульс, образующийся при разгоне и торможении цепочки масс устраняется любым иным способом, например производится синхронное изменение сечения столба жидкости, газа, плазмы по всей его длине, выполняющего роль цепочки дискретных масс, либо производится принудительное затормаживание перемещаемого объекта в момент разгона цепочки масс.
| RU 98102898 А, 20.12.1999 | |||
| RU 99102685 A, 20.12.2000 | |||
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| ИНГАЛЯЦИОННОЕ УСТРОЙСТВО И АППАРАТ ДЛЯ ИНГАЛЯНТА | 2014 |
|
RU2608689C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНЕРЦИОННОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СИЛЫ, ВЫЗЫВАЮЩЕЙ ДВИЖЕНИЕ | 1994 |
|
RU2110432C1 |

