Область техники
Изобретение относится к радиотехнике, в частности к радиопеленгации.
Уровень техники
Пеленгация источников радиоизлучения (ИРИ) имеет место в процессе мониторинга радиоэлектронной обстановки. При этом необходимо определять не только азимутальные, но и угломестные пеленги ИРИ, что серьезно увеличивает вычислительную сложность соответствующих способов. Пеленгатор регистрирует излучение путем записи сигналов на элементах антенной системы (AC) - вибраторах. Выполняя различные действия над сигналами с вибраторов, определяют параметры излучения.
Известен авторский способ определения азимутальных и угломестных пеленгов источников радиоизлучения с повышенным быстродействием [1], выбранный в качестве ближайшего аналога (прототипа) предлагаемого способа. Способ-прототип предназначен для нелинейных АС, а для линейных АС проводят разделение на две логические части, выбор опорного элемента в каждой из выделенных частей АС; восстановление (фиксацию, запись) вектора комплексных амплитуд сигналов, полученных с выхода каждого элемента АС, с последующим его разделением, соответствующим логическому разделению АС; использование для определения азимутальных и угломестных пеленгов для каждого ИРИ систем координат, связанных с первой и со второй логическими частями АС, с помощью процедуры поиска максимумов квадрата модуля одномерного углового спектра определение произведений косинусов азимутального и угломестного пеленгов для каждого ИРИ с использованием измеренных набегов фаз на элементах АС относительно выбранного опорного элемента и с учетом того, что в аналитическое выражение комплексной амплитуды сигнала на соответствующем элементе АС азимутальные и угломестные пеленги входят в качестве произведения их косинусов, вычисление этих пеленгов.
Недостатком прототипа является необходимость использования нелинейной AC, a также отсутствие учета зачастую известной информации: известного значения азимутальной составляющей пеленга и факта регистрации только одного сигнала. Кроме того, прототип требует как минимум трех синхронизированных каналов регистрации даже при регистрации одного сигнала. Синхронизация каналов - достаточно сложная процедура, и она дополнительно усложняется при увеличении числа каналов. Есть пеленгаторы, имеющие только два канала, но число элементов (вибраторов) в их АС не меньше трех с попарным опросом элементов (вибраторов). Чтобы применить способ прототипа, надо знать точно время переключения вибраторов [2] и принять допущение, что за это время пеленги не изменились. В силу этих проблем в пеленгаторах с двумя каналами угол места не определяется, а определяется только азимут излучения. В практических приложениях этого недостаточно, особенно в горной или холмистой местности.
Раскрытие изобретения
Достигаемый технический результат - существенное упрощение, минимизация количества элементов и аппаратуры для передвижных (переносимых) пеленгаторов при пеленгации одиночных (отдельных) сигналов, существенное повышение скорости и точности определения угломестных пеленгов при приеме радиосигналов одного ИРИ с использованием линейных и нелинейных (в т.ч. кольцевых) антенных систем (АС), состоящих из слабонаправленных элементов (вибраторов) и имеющих два синхронизированных канала регистрации и известный азимутальный пеленг радиоизлучения. Повышение скорости определения пеленгов достигается за счет использования особенностей линейных элементов АС.
В прототипе необходимо иметь минимум три элемента (вибратора) в АС и минимум три синхронизованных канала обработки сигналов. В предлагаемом способе достаточно иметь только два элемента (вибратора) в АС и два синхронизованных канала обработки сигналов.
В обоих способах присутствует сложная операция синхронизации измерительных каналов. Но синхронизовать два канала значительно проще, чем три канала. Таким образом, в предлагаемом способе сокращено на треть число элементов пеленгатора, увеличено быстродействие и снижена вычислительная сложность определения угломестных пеленгов ИРИ, существенно уменьшено технологическое время на синхронизацию измерительных каналов.
В предлагаемом способе определяют для поступившего на АС радиосигнала его амплитуду (мощность) u и угломестный пеленг β при известном азимуте θ.
Способы самостоятельного определения азимутальной составляющей пеленга известны и описаны, например, в [2]. Для пеленгатора с двумя каналами регистрации можно указать следующий способ определения азимутальной составляющей пеленга. Прямую линию, проходящую через любые два вибратора, ориентируют механически или расчетным путем таким образом, чтобы фазы излучения на каждом элементе (вибраторе) были равны. Направление азимута пеленга при любом значении угломестного пеленга перпендикулярно к указанной прямой, и таким образом, азимутальная составляющая пеленга определена.
Способ определения с повышенным быстродействием при известном азимутальном пеленге θ значений угломестного пеленга β и амплитуды u сигнала источника радиоизлучения включает выбор двух элементов антенной системы, восстановление вектора комплексных амплитуд сигналов у1 и у2 с выходов выбранных элементов. Далее у1 и у2 поступают на делитель (у2/у1) с вычислением косинуса угломестного пеленга β на выходе делителя по формуле:
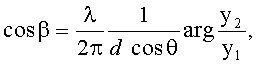
где λ - длина волны сигнала источника радиоизлучения,
d - расстояние между выбранными элементами антенной системы, далее определяют угол места β через тригонометрическую функцию арккосинус, а затем из формулы восстановленного вектора комплексных амплитуд сигналов определяют амплитуду u сигнала ИРИ.
Дополнительно для повышения достоверности результатов определяют статистические дисперсии полученных значений амплитуды u сигнала и угломестного пеленга β по общей формуле из [3]:
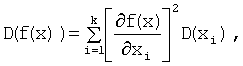
где f(x) - cosβ или u; xi, xi=1…6(k=6); x1≡λ; x2≡d; x3≡cosθ;
 ; x5=φ - начальная фаза сигнала y1 или y2, х6=у1 или у2;
; x5=φ - начальная фаза сигнала y1 или y2, х6=у1 или у2;
с использованием аналитических выражений частных производных  и заранее известных величин дисперсий D(xi) переменных xi.
и заранее известных величин дисперсий D(xi) переменных xi.
Осуществление изобретения
Способ реализуют следующим образом.
1. Выбирают любые два элемента (вибратора) и получают из них линейную АС.
Восстанавливают вектор комплексных амплитуд сигналов y=[y1, y2]T, полученных с выхода каждого элемента АС.
2. Для двухэлементной линейной АС комплексную амплитуду, полученную с выхода m-го элемента (вибратора), описывают формулой

где m=1, 2. (номер элемента в антенной системе),
j - мнимая единица  ,
,
θ - азимутальный пеленг,
β - угломестный пеленг,
f0 - частота сигнала, излучаемого пеленгуемым ИРИ,
u - амплитуда сигнала,
φ - начальная фаза сигнала,
t - время,
λ - длина волны сигнала ИРИ,
d - расстояние между элементами (вибраторами) антенной системы.
При этом формула для опорного (первого m=1) элемента имеет вид:
у1(θ,β,t)=u exp{j[2πf0t+φ]}.
3. Сигналы y1 и y2 поступают на делитель. Эта операция может выполняться программным путем. Аналитическое выражение для отношения (у2/у1) - комплексных амплитуд второго и первого вибраторов, когда за начало отсчета принят первый опорный элемент (вибратор): у2/у1=exp{j[(2π/λ)dcosθcosβ]}.
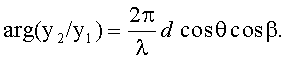
4. Приравнивают аналитическое выражение для (у2/у1) к отношению тех же величин сигналов, полученных с вибраторов. При этом для получения искомого результата достаточно приравнять их мнимые части, то есть получить функцию фазы между сигналами arg(у2/у1):
Примечание: Здесь учтено, что по определению для комплексной величины ξ=u+jv имеют lnξ=ln|ξ|+jargξ и argξ=tg(v/u).
5. Тогда 
и далее угол β вычисляют через тригонометрическую функцию арккосинус.
6. Для определения амплитуды сигнала u подставляют в формулу (1) уже известные значения cosθ, cosβ и значения комплексной амплитуды сигнала y1 или y2.
7. Дополнительно для оценки достоверности получаемых результатов вычисляют дисперсии полученных значений амплитуды сигнала и угломестного пеленга по общей формуле из [3]: 
Время получения результата (обработки сигналов в простых вычислениях по формулам (1-3)) в предлагаемом способе на порядок меньше, чем в прототипе.
Конкретно в предлагаемом способе пеленгатор регистрирует излучение путем записи сигналов на вибраторах. Зарегистрированные сигналы, каждый их которых представлен в виде ряда комплексных чисел, делят друг на друга в делителе. С делителя снимают сигнал (тоже комплексное число), который связан с искомой величиной (углом места) известной зависимостью формулы (2). Отсюда находят значение косинуса угла места. После чего по формуле (1) определяют амплитуду сигнала. Затем по известной формуле (3) вычисляют дисперсии полученных оценок параметров сигналов излучения.
Данную процедуру выполняют для всей записи сигналов и результаты усредняют.
Пример имитационного моделирования способа в пакете Matlab.
ИРИ излучает реальный гармонический сигнал неизвестной амплитуды u на частоте 100 МГц, имеющий азимутальный пеленг θ=60°, при этом угломестный пеленг β неизвестен. Соотношение сигнал/шум сделано равным 20 дБ.
Пеленгацию осуществляют посредством АС из двух вибраторов. Расстояние d между элементами АС установлено оптимально равным λ/2 для упрощения вычислений.
Измеренное отношение у2/у1 равно ехр(j1,360) или cos1,360+j sin1,360. ln|ξ|=ln1=0; argξ=tg1,360.
Вычисления проводили путем прямого расчета по формулам (2, 1, 3). Время выполнения обработки сигналов в пакете Matlab на обычном ПК с 2-ядерным процессором, процессорной частотой 2 ГГц и операционной системой Windows - менее 0,001 сек.
Taк как  , то
, то  или
или  , cosβ=0,866, β=30°. Из выражения, полученного при регистрации сигнала, определяют амплитуду сигнала u=4 (мВ).
, cosβ=0,866, β=30°. Из выражения, полученного при регистрации сигнала, определяют амплитуду сигнала u=4 (мВ).
По результатам дополнительной оценки дисперсий результатов погрешности полученных величин не превышают 1%.
Источники информации
1. Патент РФ №2380720 «Способ определения азимутальных и угломестных пеленгов источников радиоизлучения с повышенным быстродействием», Грешилов А.А., Плохута П.А., МПК 00185/04.
2. Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. Фазовый метод определения координат. - М.: Сов. радио, 1979.
3. Грешилов А.А. Математические методы принятия решений. Допущено Учебно-методическим объединением по университетскому политехническому образованию в качестве учебного пособия для студентов высших учебных заведений, обучающихся по машиностроительным специальностям. М.: Изд. МГТУ им. Н.Э.Баумана, 2006. - 584 с.
Изобретение относится к радиотехнике, в частности к радиопеленгации. Технический результат - существенное упрощение, минимизация количества элементов и аппаратуры для передвижных (переносимых) пеленгаторов при пеленгации одиночных (отдельных) сигналов, существенное повышение скорости и точности определения угломестных пеленгов при приеме радиосигналов одного источника радиоизлучения (ИРИ) с использованием линейных и нелинейных (в т.ч. кольцевых) антенных систем (АС), состоящих из слабонаправленных элементов (вибраторов) и имеющих два синхронизированных канала регистрации и известный азимутальный пеленг радиоизлучения. Повышение скорости определения пеленгов достигается за счет использования особенностей линейных элементов АС. Способ определения с повышенным быстродействием при известном азимутальном пеленге θ значений угломестного пеленга β и амплитуды и сигнала источника радиоизлучения включает выбор двух элементов антенной системы, восстановление вектора комплексных амплитуд сигналов у1 и у2 с выходов выбранных элементов. Далее у1 и у2 поступают на делитель (у2/у1) с вычислением косинуса угломестного пеленга β на выходе делителя по формуле:  где λ - длина волны сигнала источника радиоизлучения, d - расстояние между выбранными элементами антенной системы, далее определяют угол места β через тригонометрическую функцию арккосинус, а затем из формулы восстановленного вектора комплексных амплитуд сигналов определяют амплитуду и сигнала ИРИ. Дополнительно для повышения достоверности результатов определяют статистические дисперсии полученных значений амплитуды u сигнала и угломестного пеленга β по общей формуле:
где λ - длина волны сигнала источника радиоизлучения, d - расстояние между выбранными элементами антенной системы, далее определяют угол места β через тригонометрическую функцию арккосинус, а затем из формулы восстановленного вектора комплексных амплитуд сигналов определяют амплитуду и сигнала ИРИ. Дополнительно для повышения достоверности результатов определяют статистические дисперсии полученных значений амплитуды u сигнала и угломестного пеленга β по общей формуле:  где f(x) - cosβ или u; хi, i=1…6(k=6); х1≡λ; х2≡d; x3≡cosθ;
где f(x) - cosβ или u; хi, i=1…6(k=6); х1≡λ; х2≡d; x3≡cosθ;  x5≡φ - начальная фаза сигнала у1 или у2; x6≡у1 или у2; с использованием аналитических выражений частных производных
x5≡φ - начальная фаза сигнала у1 или у2; x6≡у1 или у2; с использованием аналитических выражений частных производных  и заранее известных величин дисперсий D(xi) переменных хi. 1 з.п. ф-лы.
и заранее известных величин дисперсий D(xi) переменных хi. 1 з.п. ф-лы.
1. Способ определения с повышенным быстродействием при известном азимутальном пеленге θ значений угломестного пеленга β и амплитуды u сигнала источника радиоизлучения (ИРИ), включающий элементы в антенной системе (АС) и синхронизированные каналы обработки сигналов, отличающийся тем, что производят восстановление вектора комплексных амплитуд сигналов у1 и у2 с выходов выбранных элементов АС; восстановленный вектор комплексных амплитуд сигналов описан формулой:

где m - номер элемента в AC (m=1 или 2),
j - мнимая единица 
θ - азимутальный пеленг,
β - угломестный пеленг,
f0 - частота сигнала, излучаемого пеленгуемым ИРИ,
u - амплитуда сигнала,
φ - начальная фаза сигнала,
t - время,
λ - длина волны сигнала ИРИ,
d - расстояние между элементами АС;
далее у1 и у2 поступают на делитель (у2/у1), при этом аналитическое выражение для (у2/у1) приравнивают к отношению мнимых частей тех же величин сигналов, полученных с элементов АС:
arg(у2/у1)=(2π/λ)d cosθ cosβ;
тогда косинус угломестного пеленга β на выходе делителя вычисляют по формуле:
далее определяют угол β через тригонометрическую функцию арккосинус, а затем определяют амплитуду u сигнала ИРИ путем подстановки в вышеприведенную формулу восстановленного вектора комплексных амплитуд сигналов у1 или у2 уже известных значений cosθ, cosβ и значений у1 или у2.
2. Способ по п.1, включающий дополнительное вычисление дисперсий полученных значений амплитуды u сигнала и угломестного пеленга β по общей формуле:
где f(x) - cos β или u; xi, i=1…6(k=6); х1≡λ; х2≡d; x3≡cosθ;  x5≡φ - начальная фаза сигнала у1 или у2; x6≡у1 или у2,
x5≡φ - начальная фаза сигнала у1 или у2; x6≡у1 или у2,
с использованием аналитических выражений частных производных и заранее известных величин дисперсий D(xi) переменных xi.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНЫХ И УГЛОМЕСТНЫХ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ПОВЫШЕННЫМ БЫСТРОДЕЙСТВИЕМ | 2008 |
|
RU2380720C2 |
| СПОСОБ ПЕЛЕНГАЦИИ МНОЖЕСТВА ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ, ОДНОВРЕМЕННО ПОПАДАЮЩИХ В ПОЛОСУ ПРИЕМА | 2001 |
|
RU2207583C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ С ПОВЫШЕННОЙ ЭФФЕКТИВНОСТЬЮ | 2008 |
|
RU2381519C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1999 |
|
RU2144200C1 |
| US 6646601 B2, 11.11.2003 | |||
| ПАРОГАЗОВАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА И СПОСОБ ДЕЙСТВИЯ ТАКОЙ УСТАНОВКИ | 2001 |
|
RU2245446C2 |
| US 5815117 A, 29.09.1998. | |||

