Область техники
Изобретение относится к радиотехнике, в частности к радиопеленгации.
Уровень техники
Пеленгация источников радиоизлучения (ИРИ) имеет место в процессе мониторинга радиоэлектронной обстановки. При этом необходимо определять не только азимутальные, но и угломестные пеленги ИРИ, что серьезно увеличивает вычислительную сложность соответствующих способов. Пеленгатор регистрирует излучение путем записи сигналов на элементах антенной системы (АС) - вибраторах. Выполняя различные действия над сигналами с вибраторов, определяют параметры излучения.
Известен авторский способ определения азимутальных и угломестных пеленгов источников радиоизлучения с повышенным быстродействием [1], выбранный в качестве ближайшего аналога (прототипа) предлагаемого способа. Способ-прототип предназначен для нелинейных АС, а для линейных АС проводят разделение на две логические части, выбор опорного элемента в каждой из выделенных частей АС; восстановление (фиксацию, запись) вектора комплексных амплитуд сигналов, полученных с выхода каждого элемента АС, с последующим его разделением, соответствующим логическому разделению АС; использование для определения азимутальных и угломестных пеленгов для каждого ИРИ систем координат, связанных с первой и со второй логическими частями АС, с помощью процедуры поиска максимумов квадрата модуля одномерного углового спектра определение произведений косинусов азимутального и угломестного пеленгов для каждого ИРИ с использованием измеренных набегов фаз на элементах АС относительно выбранного опорного элемента и с учетом того, что в аналитическое выражение комплексной амплитуды сигнала на соответствующем элементе АС азимутальные и угломестные пеленги входят в качестве произведения их косинусов, вычисление этих пеленгов.
Прототип требует как минимум трех синхронизированных каналов регистрации даже при регистрации одного сигнала ИРИ. Синхронизация каналов - достаточно сложная процедура, и она дополнительно усложняется при увеличении числа каналов. Есть пеленгаторы, имеющие только два канала. Число вибраторов в их АС должно быть не меньше трех, при этом происходит попарный опрос вибраторов. Чтобы применить способ прототипа, надо знать точно время переключения вибраторов [2]. В прототипе при несинхронизованных каналах регистрации сигналов конечный результат не будет получен вообще.
Раскрытие изобретения
Достигаемый технический результат - существенное упрощение, минимизация количества элементов и аппаратуры для передвижных (переносимых) пеленгаторов при пеленгации одиночных (отдельных) сигналов, повышение быстродействия и точности определения азимутальных и угломестных составляющих пеленгов и амплитуды сигналов при приеме радиосигналов одного ИРИ с использованием кольцевых АС, состоящих из слабонаправленных элементов (вибраторов) и имеющих два несинхронизованных канала регистрации с фазовыми искажениями. Устранение фазового искажения достигается последовательным подключением пар вибраторов. Повышение скорости определения пеленгов достигается за счет сведения алгоритма определения параметров сигнала к прямому расчету по элементарным формулам. Способ является простым с точки зрения вычислительных затрат, поэтому может применяться в пеленгационных системах, в которых наиболее критичным требованием, предъявляемым к алгоритмам, является быстродействие. Предлагаемый способ значительно уменьшает технологическое время на синхронизацию измерительных каналов. В предлагаемом изобретении требуется определить для поступившего на АС сигнала амплитуду (мощность) u, угломестный пеленг β и азимутальный пеленг θ при несинхронизированных каналах. Способ позволяет исключить сдвиг фаз в каналах и снизить вычислительную сложность алгоритма определения пеленгов ИРИ и амплитуды (мощности) сигнала.
Способ определения с повышенным быстродействием азимутального θ и угломестного β пеленгов и амплитуды u сигнала источника радиоизлучения пеленгатором с несихронизованными каналами регистрации сигналов включает выбор трех элементов круговой АС, в которых присутствует константный фазовый сдвиг φ, вызванный несинхронизованностью каналов, и последовательный попарный перебор выбранных элементов АС для восстановления вектора комплексных амплитуд сигналов y1, y2, y3, y4, y5, y6 с выходов выбранных элементов АС. Этим сигналам после попарной регистрации соответствует система из 6 уравнений:

где u - амплитуда сигнала,
j - мнимая единица  ;
;
φ - константный фазовый сдвиг от несинхронизованности двух каналов;



θ - азимутальный пеленг;
β - угломестный пеленг;
γ1 - геометрический угол между 1-м и 2-м элементами АС, при этом положение 1-го элемента выбрано за начало отсчета углов γ1 и γ2;
γ2 - геометрический угол между 1-м и 3-м элементами АС;
T1 - время начала записи сигналов со второй пары, полученной в процессе перебора трех элементов АС;
T2 - время начала записи сигналов с третьей пары, полученной в процессе перебора трех элементов АС;
f0 - частота сигнала, излучаемого пеленгуемым ИРИ;
λ - длина волны сигнала ИРИ;
R - радиус круговой АС.
Сигналы y1, y2, y3, y4, y5, y6 подают на первый делитель для получения отношений:
(y2/y1), (y4/y3), (y6/y5).
Далее полученные отношения подают на второй делитель для получения следующих отношений: (y2y3)/(y1y4), (y2y5)/(y1y6), (y4y5)/(y3y6).
Эти полученные отношения подают в вычислитель для их логарифмирования и получения значений тригонометрических тангенсов трех оценок азимутальных пеленгов:


где 


Среднюю оценку тангенса азимутального пеленга определяют по формуле:

а затем через функцию арктангенса определяют угол азимутального пеленга.
Далее находят значения косинусов трех оценок угла места из трех уравнений следующей системы:

И аналогично средней оценке тангенса азимутального пеленга определяют среднюю оценку косинуса угла места, а затем через функцию арккосинуса сам угол места.
После этого по любому уравнению восстановленного вектора комплексных амплитуд сигналов y1, y2, y3, y4, y5, y6 определяют амплитуду u сигнала ИРИ.
Дополнительно для повышения достоверности результатов определяют статистические дисперсии полученных значений азимутального и угломестного пеленгов и амплитуды сигнала ИРИ по общей формуле из [3]:
 ,
,
где f(x) - функция, определяющая значение искомого параметра;
xi - i-я переменная, входящая в f(xi), i=1, 2, …, k, k - число переменных;
с использованием аналитических выражений частных производных  и заранее известных величин дисперсий D(xi) переменных xi.
и заранее известных величин дисперсий D(xi) переменных xi.
Осуществление изобретения
Способ реализуют следующим образом.
Пеленгатор имеет два несинхронизованных канала регистрации сигналов. В одном из каналов присутствует константный «паразитный» фазовый сдвиг φ сигнала канала относительно сигнала другого канала. Проводят пеленгацию единственного ИРИ посредством трехэлементной круговой АС, в которой элементы опрашивают попарно.
Записывают нелинейную систему уравнений, правая часть которой является комплексной огибающей выходных сигналов элементов круговой АС:
 ;
;
где m=1, 2, 3;
γm - угол между m-м элементом (вибратором) и направлением первого элемента, выбранного за начало отсчета геометрических углов круговой АС;
φ0 - начальная фаза сигналов;
t - аргумент времени.
Записывая (регистрируя) комплексную огибающую с выходов каждой пары элементов (вибраторов), получают систему уравнений

Поделив друг на друга соответствующие уравнения системы (1), получают:

Благодаря этому делению исключают амплитуду u.
Из системы (2) путем последующего деления уравнений друг на друга получают:

Благодаря этому делению происходит избавление от «паразитного» константного сдвига фаз φ в каналах АС от их несинхронизованности. Таким образом, паразитный константный сдвиг фаз от несинхронизованности каналов пеленгатора устраняют последовательным подключением пар элементов (вибраторов) АС. Устранение фазового искажения также облегчает настройку пеленгаторов АС.
Прологарифмировав (3) и подставив вместо х, q и z соответствующие выражения


получают:

Примечание: Здесь учтено, что по определению комплексного числа: lnξ=ln|ξ|+jargξ; ξ=u+jv. Тогда argξ=tg(v/u), a arg(y2y3/(y1y4))=ln(y2y3/(y1y4)), где y2y3/(y1y4) - измеренная комплексная величина ξ. Аналогично и для других выражений в системе (4).
Поделив в системе (4) первое уравнение на второе и выполнив тригонометрические преобразования, получают формулу тангенса первой оценки угла азимутального пеленга:

Аналогично, из первого и третьего, а также второго и третьего уравнений системы
(4) получают следующие формулы тангенсов оценок угла азимутального пеленга:


где 


Среднюю оценку тангенса азимутального пеленга определяют по формуле:

Далее через функцию арктангенса определяют сам азимутальный угол θ. Зная угол θ, легко найти косинус угла места β из любого уравнения системы (4), или аналогично средней оценке тангенса азимутального пеленга определяют среднюю оценку косинуса угла места, а затем через функцию арккосинуса сам угол места.
После этого по любому уравнению системы (1) восстановленного вектора комплексных амплитуд сигналов y1, y2, y3, y4, y5, y6 определяют амплитуду u сигнала ИРИ.
Таким образом, в предлагаемом способе зарегистрированные сигналы, каждый из которых представлен в виде ряда комплексных чисел, поступают на первый делитель, где их делят друг на друга. С первого делителя снимают сигналы (тоже комплексные числа) и подают на второй делитель, затем комплексные числа со второго делителя поступают на вычислитель для определения искомых результатов. Данную процедуру выполняют для всех записей сигналов и результаты усредняют.
Пример имитационного моделирования способа в пакете Matlab
ИРИ излучает реальный гармонический сигнал на частоте 100 МГц и имеет для проверки результатов осуществления способа заранее заданные азимутальный пеленг θ=50° и угломестный пеленг β=20°. Соотношение сигнал/шум сделано равным 20 дБ, при этом u=8 мВ.
Пеленгацию осуществляют посредством круговой двухканальной нелинейной АС, состоящей из 3-х элементов (вибраторов). Для упрощения вычислений радиус R круговой АС выбран равным половине длины волны λ/2. Задержка переключения коммутатора попарного опроса элементов (задержка между началом записи данных с разных пар элементов АС) выбрана 10 мс, поэтому T1=10 мс; Т2=20 мс. Кроме того, имеет место постоянный сдвиг фаз от несинхронизованности каналов  .
.
Вычисления проводили путем прямого расчета по вышеуказанным формулам. Время выполнения обработки сигналов в пакете Matlab на обычном ПК с 2-ядерным процессором, процессорной частотой 2 ГГц и операционной системой Windows - менее 0,001 сек.
В результате расчета получили: θ=49,98°; β=21,54°; u=8,04 мВ, средние квадратические значения отклонений полученных значений (путем извлечения квадратного корня из дисперсий): σ(θ)=0,6°; σ(β)=0,7°; σ(u)=0,09 мВ.
Источники информации
1. Патент РФ №2380720 «Способ определения азимутальных и угломестных пеленгов источников радиоизлучения с повышенным быстродействием», Грешилов А.А., Плохута П.А., МПК G01S 5/04.
2. Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. Фазовый метод определения координат. - М.: Сов. радио, 1979.
3. Грешилов А.А. Математические методы принятия решений. Допущено Учебно-методическим объединением по университетскому политехническому образованию в качестве учебного пособия для студентов высших учебных заведений, обучающихся по машиностроительным специальностям. М.: Изд. МГТУ им. Н.Э.Баумана, 2006. - 584 с.
Изобретение относится к радиотехнике, в частности к радиопеленгации. Достигаемый технический результат - существенное упрощение, минимизация количества элементов и аппаратуры для передвижных (переносимых) пеленгаторов при пеленгации одиночных (отдельных) сигналов, повышение быстродействия и точности определения азимутальных и угломестных составляющих пеленгов и амплитуды сигналов при приеме радиосигналов одного источника радиоизлучения (ИРИ) с использованием кольцевых антенных систем (АС), имеющих два несинхронизованных канала регистрации. Повышение скорости определения пеленгов достигается за счет сведения алгоритма определения параметров сигнала к прямому расчету по элементарным формулам. Способ является простым с точки зрения вычислительных затрат, поэтому может применяться в пеленгационных системах, в которых наиболее критичным требованием, предъявляемым к алгоритмам, является быстродействие. Заявленный способ включает выбор трех элементов круговой АС, в которых присутствует константный фазовый сдвиг φ, вызванный несинхронизованностью каналов, и последовательный попарный перебор выбранных элементов АС для восстановления вектора комплексных амплитуд сигналов у1, у2, у3, у4, у5, у6 с выходов выбранных элементов АС. Сигналы у1, у2, у3, у4, у5, у6 подают на первый делитель для получения отношений: (у2/у1), (у4/у3), (у6/у5). Далее полученные отношения подают на второй делитель для получения следующих отношений: (у2у3)/(у1у4), (у2у5)/(у1у6), (у4у5)/(у3у6). Эти полученные отношения подают в вычислитель для их логарифмирования и получения значений тригонометрических тангенсов трех оценок азимутальных пеленгов и по ним средней оценки тангенса азимутального пеленга, а затем через функцию арктангенса определяют угол азимутального пеленга. Аналогично средней оценке тангенса азимутального пеленга по другим формулам определяют среднюю оценку косинуса угла места, а затем через функцию арккосинуса сам угол места. После этого по любому уравнению восстановленного вектора комплексных амплитуд сигналов у1, у2, у3, у4, у5, у6 определяют амплитуду сигнала ИРИ. Дополнительно для повышения достоверности результатов определяют статистические дисперсии полученных значений азимутального и угломестного пеленгов и амплитуды сигнала ИРИ. 1 з.п. ф-лы.
1. Способ определения азимутального θ и угломестного β пеленгов и амплитуды u сигнала источника радиоизлучения (ИРИ) пеленгатором с несихронизованными каналами регистрации сигналов, включающий выбор трех элементов круговой антенной системы (АС), в которых присутствует константный фазовый сдвиг φ, вызванный несинхронизованностью каналов, и последовательный попарный перебор выбранных элементов АС для восстановления вектора комплексных амплитуд сигналов y1, y2, y3, y4, y5, y6 с выходов выбранных элементов АС, этим сигналам после попарной регистрации соответствует система из 6 уравнений:

где j - мнимая единица 


γ1 - геометрический угол между 1-м и 2-м элементами АС, при этом положение 1-го элемента выбрано за начало отсчета углов γ1 и γ2;
γ2 - геометрический угол между 1-м и 3-м элементами АС;
T1 - время начала записи сигналов со второй пары, полученной в процессе перебора трех элементов АС;
Т2 - время начала записи сигналов с третьей пары, полученной в процессе перебора трех элементов АС;
f0 - частота сигнала, излучаемого пеленгуемым ИРИ;
λ - длина волны сигнала ИРИ;
R - радиус круговой АС;
сигналы y1, y2, y3, y4, y5, y6 подают на первый делитель для получения отношений:
(y2/y1), (y4/y3), (y6/y5),
далее полученные отношения подают на второй делитель для получения отношений:
(y2y3)/(y1y4), (y2y5)/(y1y6), (y4y5)/(y3y6);
затем полученные отношения с выходов второго делителя подают в вычислитель для их логарифмирования и получения значений тригонометрических тангенсов трех оценок азимутальных пеленгов:



где 

среднюю оценку тангенса азимутального пеленга определяют по формуле:
 ,
,
а затем через функцию арктангенса определяют угол азимутального пеленга;
далее находят значения косинусов трех оценок угла места из трех уравнений системы:
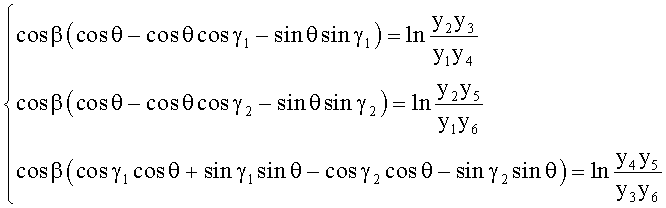
и аналогично средней оценке тангенса азимутального пеленга определяют среднюю оценку косинуса угла места, а затем через функцию арккосинуса сам угол места; после этого по любому уравнению восстановленного вектора комплексных амплитуд сигналов y1, y2, y3, y4, y5, y6 определяют амплитуду сигнала источника радиоизлучения.
2. Способ по п.1, включающий дополнительное вычисление дисперсий значений азимутального и угломестного пеленгов и амплитуды сигнала источника радиоизлучения по общей формуле: ,
где f(x) - функция, определяющая значение искомого параметра;
xi - i-я переменная, входящая в f(xi), i=1, 2, …, k, k - число переменных;
с использованием аналитических выражений частных производных  и заранее известных величин дисперсий D(xi) переменных xi.
и заранее известных величин дисперсий D(xi) переменных xi.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНЫХ И УГЛОМЕСТНЫХ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ПОВЫШЕННЫМ БЫСТРОДЕЙСТВИЕМ | 2008 |
|
RU2380720C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2003 |
|
RU2251707C2 |
| RU 22288481 C2, 27.11.2006 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОПЕРЕДАТЧИКА МОБИЛЬНОЙ СТАНЦИЕЙ РАДИОКОНТРОЛЯ | 2006 |
|
RU2307372C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2003 |
|
RU2263926C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2334244C1 |
| US 4641143 A, 03.02.1987 | |||
| US 4443801 A, 17.04.1984 | |||
| US 4317120 А, 23.02.1982. | |||

