ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к управляющему устройству для вращающейся машины переменного тока, которое имеет возможность управления вращающейся машиной переменного тока, такой как индукционная (асинхронная) машина или синхронная машина, не используя датчик положения для получения информации о положении ротора.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] Способ управления без датчика, выполняемый, основываясь на наведенном напряжении с использованием блока адаптивного наблюдения и т.п., известен в качестве способа управления вращающейся машиной переменного тока, такой как синхронная машина или асинхронная машина. У способа управления без датчика, основанного на наведенном напряжении, есть особенность в том, что датчик положения или датчик скорости могут не использоваться. Однако в области низкой скорости вращения наведенное напряжение является небольшим, и поэтому трудно детектировать или оценивать наведенное напряжение. Таким образом, существует проблема в том, что характеристики возбуждения ухудшаются в области низкой скорости вращения.
С другой стороны, в области низкой скорости, с помощью выполнения управления, основываясь на результате детектирования положения, используя характерное свойство индуктивности, когда накладывается напряжение или ток, имеющие частоту, отличающуюся от основной частоты вращающейся машины переменного тока, становится возможным выполнение возбуждения в области низкой скорости даже с помощью управления положением без датчика. Однако в случае выполнения возбуждения в области высокой скорости вращения при использовании характерного свойства индуктивности, существует недостаток в эффективности работы, показателе использования напряжения и максимальном токе из-за возникновения напряжения или тока, других, чем основная волна.
Рассматривая вышеизложенное, если вращающаяся машина переменного тока возбуждается, основываясь на результате детектирования положения, используя характерное свойство индуктивности, и вращающаяся машина переменного тока возбуждается с помощью управления без датчика, используя наведенное напряжение в области высокой скорости вращения, то становится возможным обеспечивать устройство, которое может возбуждаться во всей области скорости с низкими затратами. В этом случае важно выполнять плавное возбуждение в диапазоне от области низкой скорости вращения до области высокой скорости вращения.
[0003] Для предоставления возможности плавного возбуждения вращающейся машины переменного тока в диапазоне от области низкой скорости вращения до области высокой скорости вращения, например, раскрыто следующее изобретение.
Для соответствующей генерации фазы во вращающейся системе координат dq, необходимой в основном блоке векторного контроллера, без использования датчика положения, обеспечиваются генератор фазы низкочастотной области для генерации фазы для низкочастотной области и генератор фазы высокочастотной области для генерации фазы для высокочастотной области, и дополнительно обеспечивается синтезатор фазы для синтезирования фаз этих двух видов с помощью усреднения их взвешенным способом в отношении частоты, посредством чего синтезированная окончательная фаза используется в качестве фазы во вращающейся системе координат dq (например, см. патентный документ 1).
[0004] Кроме того, раскрыто следующее изобретение. В способе управления без датчика для выполнения плавного регулирования по диапазону от нулевой скорости до области высокой скорости вращения электродвигателя переменного тока, управление выполняется при использовании оцененного значения ωest скорости и оцененного значения θ0 положения, оцененных с помощью механической модели математического выражения с помощью устройства оценки положения и скорости, так, чтобы ошибка Δθ положения, полученная с помощью вычисления векторного произведения первого вектора магнитного потока, рассчитанного с помощью использования угла ротора, и второго вектора магнитного потока, рассчитанного без использования угла ротора, стала нулем (например, см. патентный документ 2).
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0005] Патентный документ 1: выложенная патентная публикация Японии № 10-94298 (абзац [0032], фиг. 1)
Патентный документ 2: выложенная патентная публикация Японии № 2006-158046 (абзац [0012] и [0013], фиг. 2 и 3)
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0006] В изобретении, раскрытом в патентном документе 1, так как два вида фаз синтезируются с помощью усреднения способом взвешивания в отношении частоты, необходимо одновременно получать фазу для области низкой скорости и фазу для области высокой скорости, и поэтому вычислительная обработка одновременно выполняется и в генераторе фазы низкочастотной области, и в генераторе фазы высокочастотной области, что приводит к проблеме большого увеличения количества вычислительной обработки. Кроме того, в области низкой скорости, в которой частота является низкой, необходимо выполнять возбуждение, основываясь на фазе генератора фазы низкочастотной области из двух видов фаз, и поэтому также существует проблема, что если отклик оценки генератора фазы низкочастотной области запаздывает, то эффективность отклика, такого как отклик на управление скоростью или отклик на управление крутящим моментом, не может сохраняться на высоком уровне в области низкой скорости.
[0007] Кроме того, в изобретении, раскрытом в патентном документе 2, угол ротора необходим для получения первого вектора магнитного потока, и необходимо предварительно получать угол ротора с помощью обработки детектирования или вычисления, что приводит к проблеме увеличения количества вычислений. Кроме того, если отклик детектирования или оценки угла ротора, необходимого для получения первого вектора магнитного потока, запаздывает, то отклик ошибки Δθ положения, полученной с помощью вычисления векторного произведения первого вектора магнитного потока и второго вектора магнитного потока, также запаздывает, и отклик оцененного значения ωest скорости θ и оцененного значения θest положения, вычисленных с помощью устройства оценки положения и скорости, также запаздывает. В результате возникает проблема, что эффективность отклика, такого как отклик управления скоростью или отклик управления крутящим моментом, не может сохраняться на высоком уровне.
[0008] Настоящее изобретение выполнено для решения вышеупомянутых проблем, и задачей настоящего изобретения является обеспечение управляющего устройства для вращающейся машины переменного тока, которое может плавно возбуждать вращающуюся машину переменного тока, не используя датчик положения, по всей области скорости и может реализовывать снижение количества вычислений и улучшение эффективности отклика.
[0009] Управляющее устройство для вращающейся машины переменного тока согласно настоящему изобретению включает в себя: блок детектирования вектора тока для детектирования детектированного вектора тока из тока вращающейся машины переменного тока; блок детектирования вектора магнитного потока для детектирования вектора магнитного потока ротора из детектированного вектора тока вращающейся машины переменного тока и вывода вектора магнитного потока ротора в качестве детектированного вектора магнитного потока; блок адаптивного наблюдения для вывода оцененного вектора тока, оцененного вектора магнитного потока и оцененного положения вращающейся машины переменного тока; блок управления для вывода вектора команды управления напряжением так, чтобы детектированный вектор тока совпадал с вектором команды управления током; блок приложения напряжения для приложения напряжения к вращающейся машине переменного тока, основываясь на векторе команды управления напряжением; блок вычисления вектора отклонения для вывода вектора отклонения тока, который является отклонением между оцененным вектором тока и детектированным вектором тока, и вектора отклонения магнитного потока, который является отклонением между оцененным вектором магнитного потока и детектированным вектором магнитного потока; и блок усиления отклонения для усиления вектора отклонения тока и вектора отклонения магнитного потока и вывода усиленных векторов в качестве усиленного вектора отклонения. Блок адаптивного наблюдения вычисляет и выводит оцененный вектор тока, оцененный вектор магнитного потока и оцененное положение, основываясь на векторе команды управления напряжением и усиленном векторе отклонения. Дополнительно, блок управления выводит вектор команды управления напряжением, на который накладывается вектор высокочастотного напряжения, имеющий частотную компоненту, отличающуюся от частоты для возбуждения вращающейся машины переменного тока, и блок детектирования вектора магнитного потока вычисляет и выводит детектированный вектор магнитного потока, основываясь на величине вектора высокочастотного тока, имеющего ту же самую частотную компоненту, как вектор высокочастотного напряжения, которую включен в детектированный вектор тока, и на величине магнитного потока ротора.
[0010] Благодаря вышеописанной конфигурации управляющее устройство для вращающейся машины переменного тока согласно настоящему изобретению делает возможным обеспечение управляющего устройства для вращающейся машины переменного тока, которое может плавно возбуждать вращающуюся машину переменного тока, не используя датчик положения, по всей области скорости и может реализовывать снижение количества вычислений и улучшение эффективности отклика.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
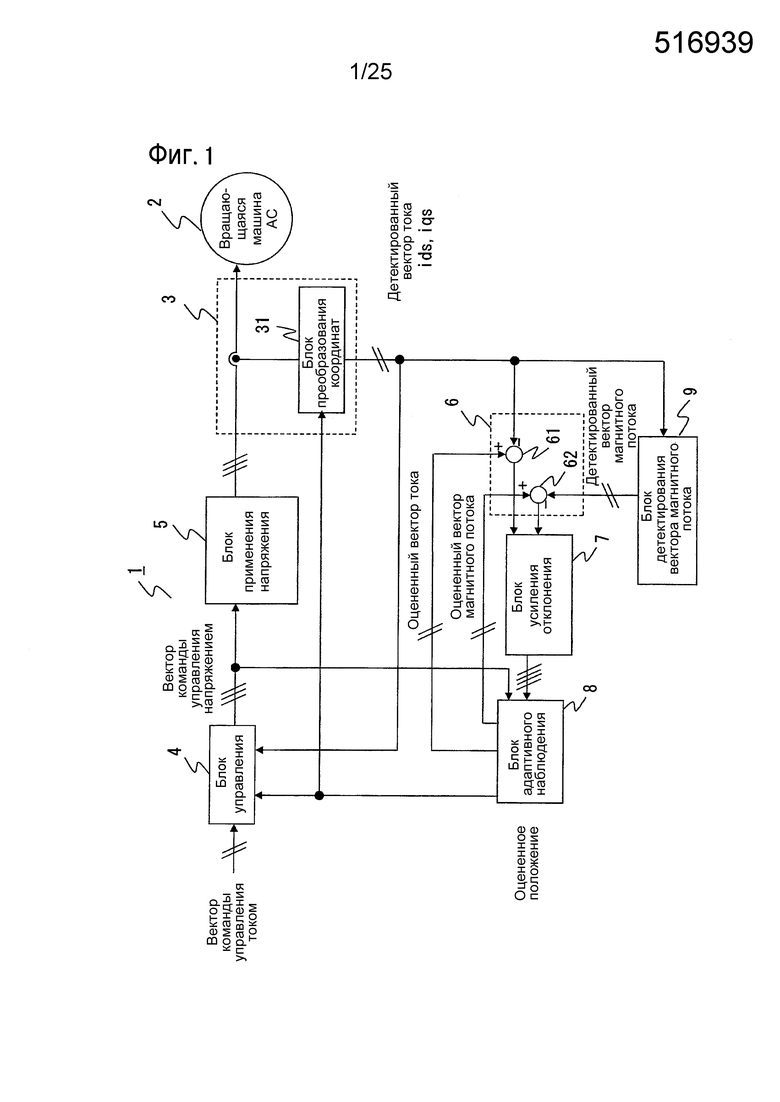
[0011] [Фиг. 1] Фиг. 1 является схемой конфигурации системы в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
[Фиг. 2] Фиг. 2 является схемой конфигурации блока управления в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
[Фиг. 3] Фиг. 3 является схемой конфигурации блока усиления отклонения в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
[Фиг. 4] Фиг. 4 является схемой конфигурации блока адаптивного наблюдения в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
[Фиг. 5] Фиг. 5 является схемой внутренней конфигурации блока адаптивного наблюдения в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
[Фиг. 6] Фиг. 6 является схемой конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
[Фиг. 7] Фиг. 7 является схемой внутренней конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
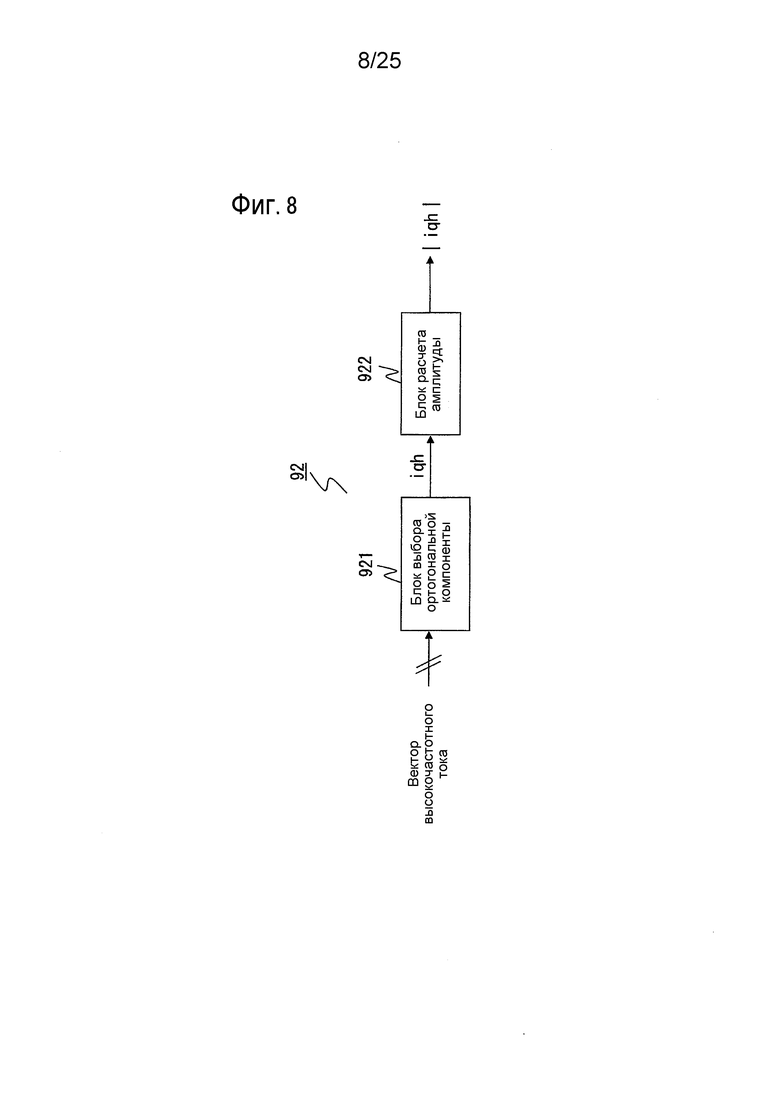
[Фиг. 8] Фиг. 8 является схемой внутренней конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
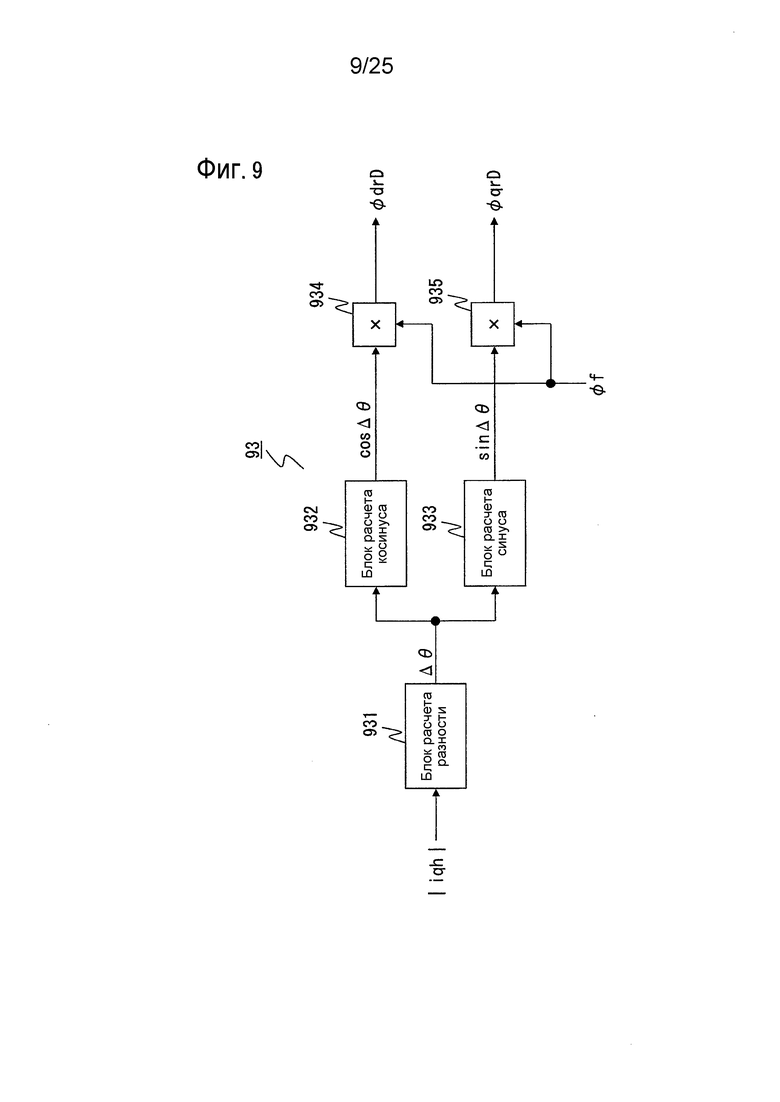
[Фиг. 9] Фиг. 9 является схемой внутренней конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
[Фиг. 10] Фиг. 10 является схемой для объяснения вектора магнитного потока ротора в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
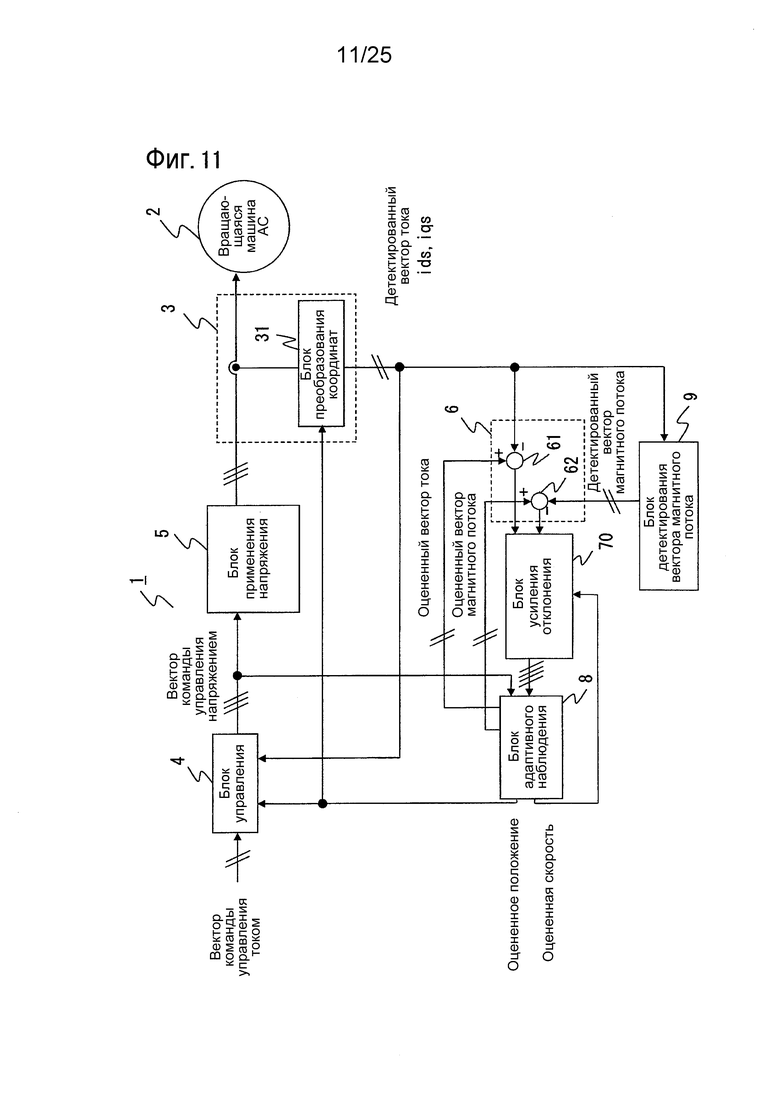
[Фиг. 11] Фиг. 11 является схемой конфигурации модификации системы в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
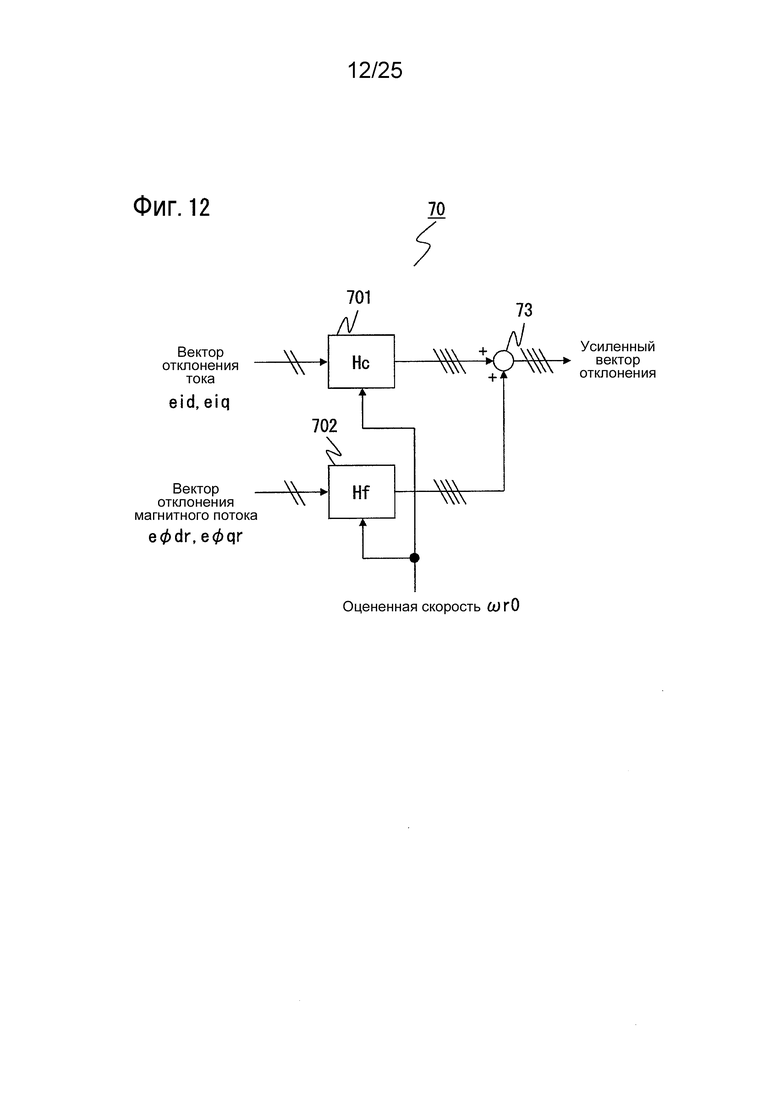
[Фиг. 12] Фиг. 12 является схемой конфигурации блока усиления отклонения данной модификации в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 1 настоящего изобретения.
[Фиг. 13] Фиг. 13 является схемой конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 2 настоящего изобретения.
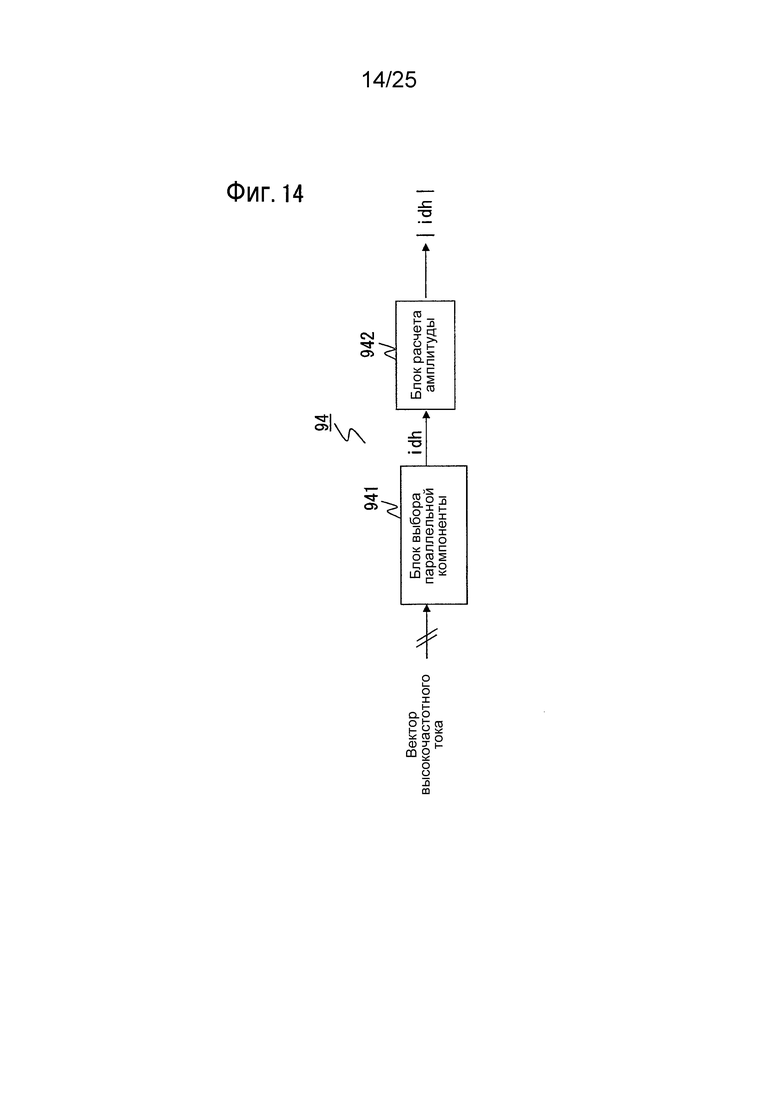
[Фиг. 14] Фиг. 14 является схемой внутренней конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 2 настоящего изобретения.
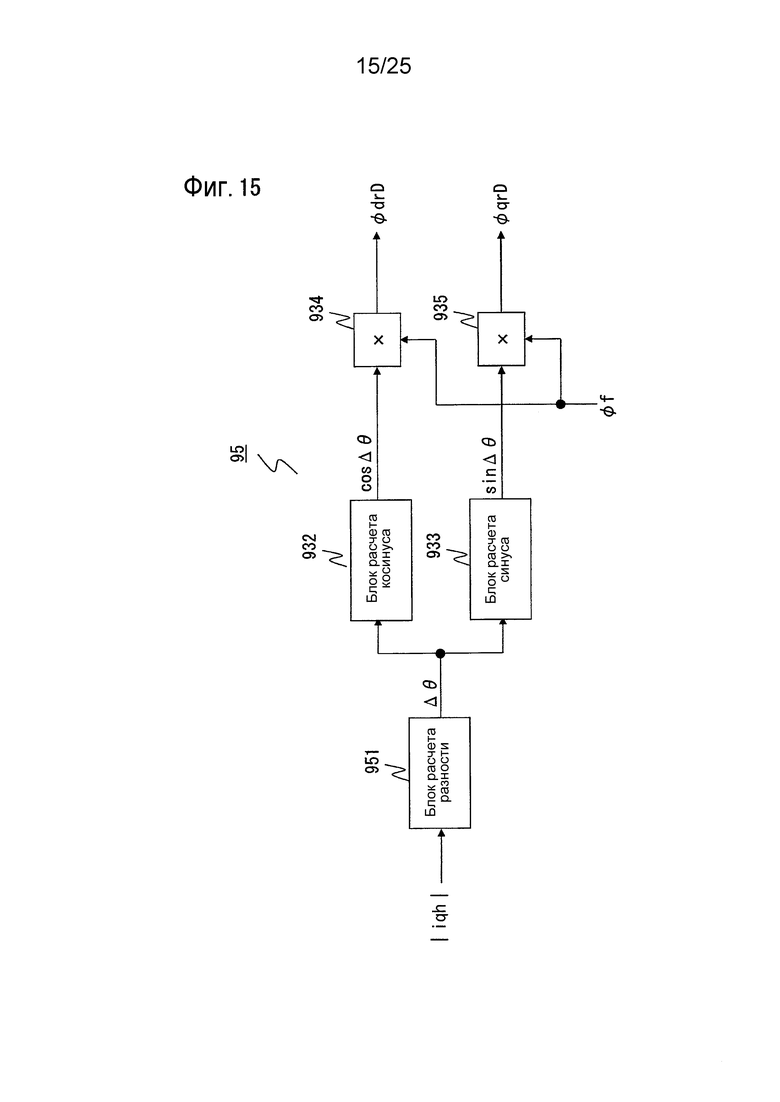
[Фиг. 15] Фиг. 15 является схемой внутренней конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 2 настоящего изобретения.
[Фиг. 16] Фиг. 16 является схемой конфигурации системы в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
[Фиг. 17] Фиг. 17 является схемой конфигурации блока управления в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
[Фиг. 18] Фиг. 18 является схемой внутренней конфигурации блока управления в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
[Фиг. 19] Фиг. 19 является схемой конфигурации блока адаптивного наблюдения в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
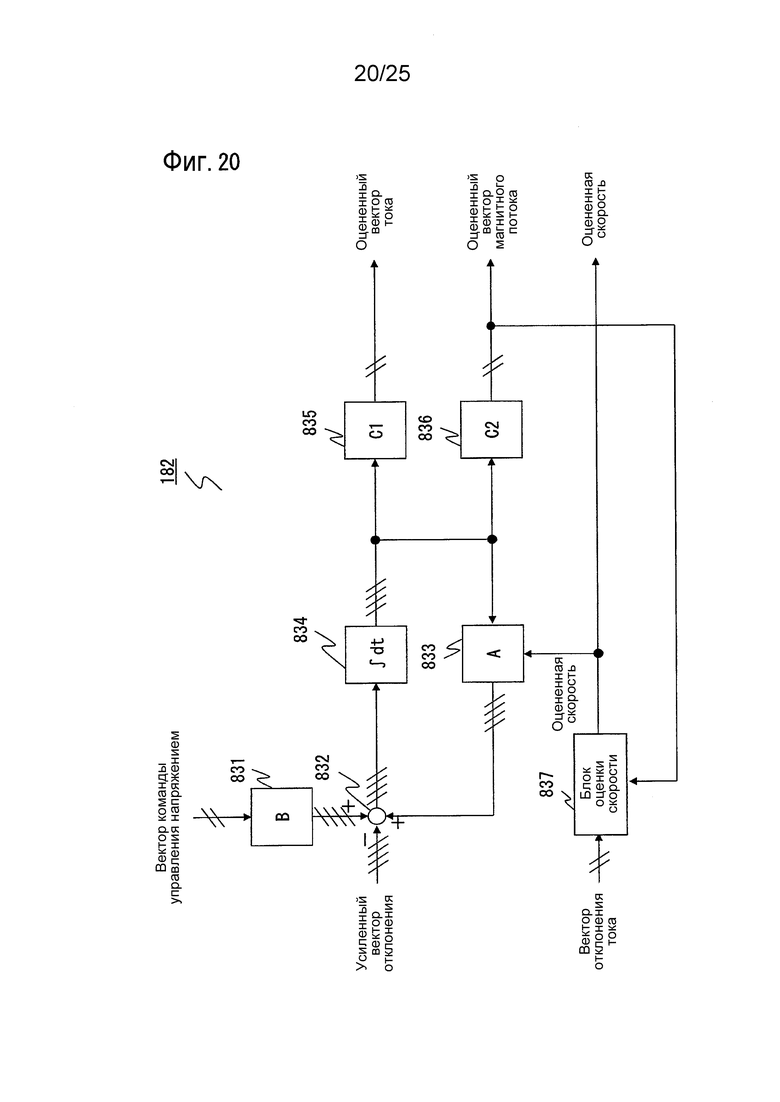
[Фиг. 20] Фиг. 20 является схемой внутренней конфигурации блока адаптивного наблюдения в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
[Фиг. 21] Фиг. 21 является схемой конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
[Фиг. 22] Фиг. 22 является схемой внутренней конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
[Фиг. 23] Фиг. 23 является схемой внутренней конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
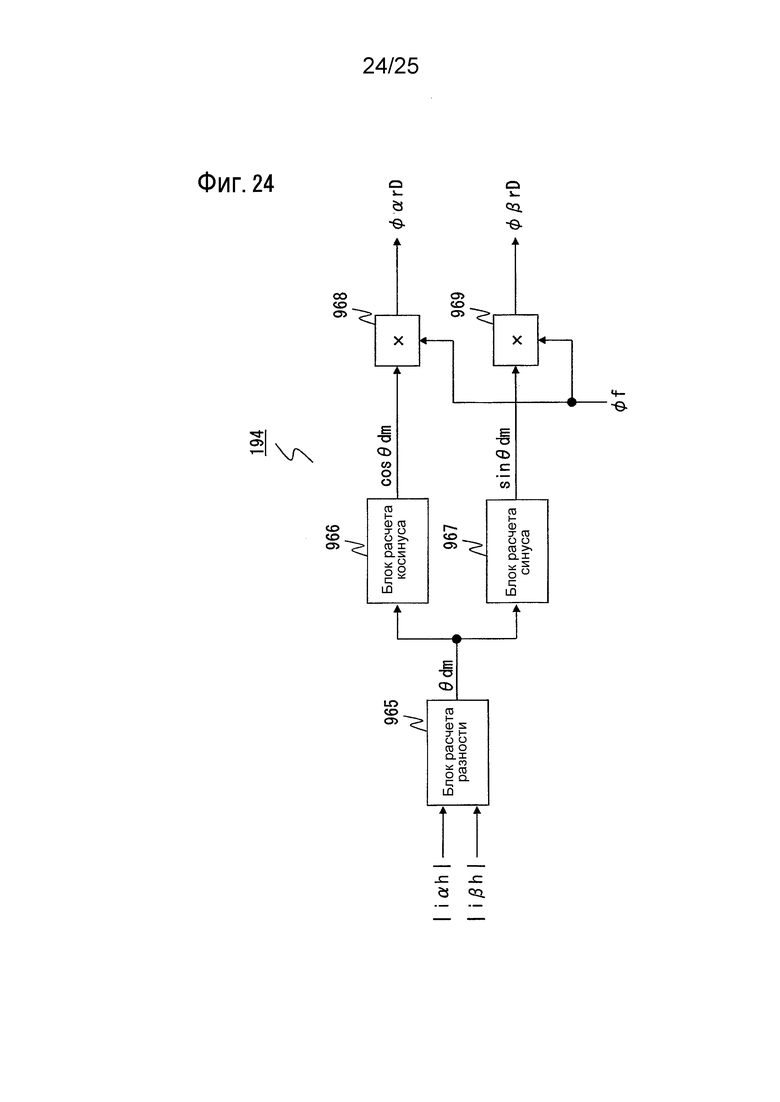
[Фиг. 24] Фиг. 24 является схемой внутренней конфигурации блока детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
[Фиг. 25] Фиг. 25 является схемой для объяснения вектора магнитного потока ротора в соответствии с управляющим устройством для вращающейся машины переменного тока варианта осуществления 3 настоящего изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0012] Вариант осуществления 1
Вариант осуществления 1 относится к управляющему устройству для вращающейся машины переменного тока, которое вычисляет вектор отклонения магнитного потока, который является отклонением между детектированным вектором магнитного потока и оцененным вектором магнитного потока, и вектор отклонения тока, который является отклонением между детектированным вектором тока и оцененным вектором тока, и возбуждает вращающуюся машину переменного тока при использовании оцененной скорости и оцененного положения, выведенных из блока адаптивного наблюдения, основываясь на усиленном векторе отклонения, полученном с помощью усиления рассчитанных векторов отклонения. В данном случае при расчете детектированного вектора магнитного потока, выведенного из блока детектирования вектора магнитного потока, вектор высокочастотного тока, имеющий ту же самую частотную компоненту, как вектор высокочастотного напряжения, извлеченный из детектированного вектора тока, и затем, при использовании величины компоненты, ортогональной к вектору высокочастотного напряжения, вычисляется разность Δθ между d-осью, на которой применяется вектор высокочастотного напряжения, и dm-осью, которая параллельна вектору магнитного потока ротора, и используются только Δθ и величина ϕf вектора магнитного потока ротора.
[0013] В дальнейшем вариант осуществления 1 настоящего изобретения будет описан, основываясь на фиг. 1, показывающей схему конфигурации системы в соответствии с управляющим устройством 1 для вращающейся машины переменного тока, фиг. 2, показывающей схему конфигурации блока управления, фиг. 3, показывающей схему конфигурации блока усиления отклонения, фиг. 4, показывающей схему конфигурации блока адаптивного наблюдения, фиг. 5, показывающей схему внутренней конфигурации блока адаптивного наблюдения, фиг. 6, показывающей схему конфигурации блока детектирования вектора магнитного потока, фиг. 7-9, показывающих схемы внутренней конфигурации блока детектирования вектора магнитного потока, фиг. 10, показывающей схему для объяснения вектора магнитного потока ротора, фиг. 11, показывающей схему конфигурации модификации системы, и фиг. 12, показывающей схему конфигурации блока усиления отклонения данной модификации.
[0014] Сначала будет описана конфигурация всей системы, включающей в себя управляющее устройство 1 для вращающейся машины переменного тока согласно варианту осуществления 1 настоящего изобретения.
На фиг. 1 управляющее устройство 1 для вращающейся машины переменного тока состоит из блока 3 детектирования вектора тока, блока 4 управления, блока 5 приложения напряжения, блока 6 вычисления вектора отклонения, блока 7 усиления отклонения, блока 8 адаптивного наблюдения и блока 9 детектирования вектора магнитного потока, для управления вращающейся машиной 2 переменного тока.
Замечено, что на фиг. 1 две диагональных линии (//), три диагональных линии (///) и четыре диагональных линии (////) указывают 2-мерные, 3-мерные и 4-мерные векторы, соответственно.
[0015] Подробности конфигурации, назначения и работы управляющего устройства 1 для вращающейся машины переменного тока будут описаны позже. Сначала будет описано краткое изложение назначения каждой составной части управляющего устройства 1 для вращающейся машины переменного тока.
Блок 3 детектирования вектора тока детектирует детектированный вектор тока из тока вращающейся машины 2 переменного тока. Блок 9 детектирования вектора магнитного потока детектирует вектор магнитного потока ротора из детектированного вектора тока вращающейся машины 2 переменного тока, выведенного из блока 3 детектирования вектора тока, и выводит вектор магнитного потока ротора в качестве детектированного вектора магнитного потока. Блок 8 адаптивного наблюдения выводит оцененный вектор тока, оцененный вектор магнитного потока и оцененное положение вращающейся машины 2 переменного тока из детектированного вектора магнитного потока. Блок 4 управления выводит вектор команды управления напряжением так, чтобы детектированный вектор тока совпадал с вектором команды управления током, и блок 5 приложения напряжения подает напряжение, основываясь на векторе команды управления напряжением, к вращающейся машине переменного тока. Блок 6 вычисления вектора отклонения выводит вектор отклонения тока, который является отклонением между оцененным вектором тока и детектированным вектором тока, и вектор отклонения магнитного потока, который является отклонением между оцененным вектором магнитного потока и детектированным вектором магнитного потока. Блок 7 усиления отклонения усиливает вектор отклонения тока и вектор отклонения магнитного потока и выводит их в качестве усиленного вектора отклонения.
[0016] На фиг. 1 в настоящем варианте осуществления 1 в качестве примера будет описан случай, когда вращающаяся машина 2 переменного тока является синхронной машиной с постоянными магнитами с характерными признаками, имеющей трехфазные обмотки. Однако даже в случае использования вращающейся машины другого типа управляющее устройство для вращающейся машины переменного тока может конфигурироваться по тому же самому правилу.
[0017] В дальнейшем будут описаны конфигурация, назначение и работа каждой составной части управляющего устройства 1 для вращающейся машины переменного тока.
Блок 3 детектирования вектора тока детектирует трехфазный ток, текущий во вращающейся машине 2 переменного тока, и выводит в качестве детектированного вектора тока ток id d-оси и ток iq q-оси, которые, соответственно, получены с помощью блока 31 преобразования координат, выполняя, с помощью использования оцененного положения θ0, описанного позже, преобразование координат трехфазного тока в направление d-оси и направление q-оси d-q осей, которые известны как ортогональная система координат, вращающаяся в синхронизации с ротором вращающейся машины 2 переменного тока.
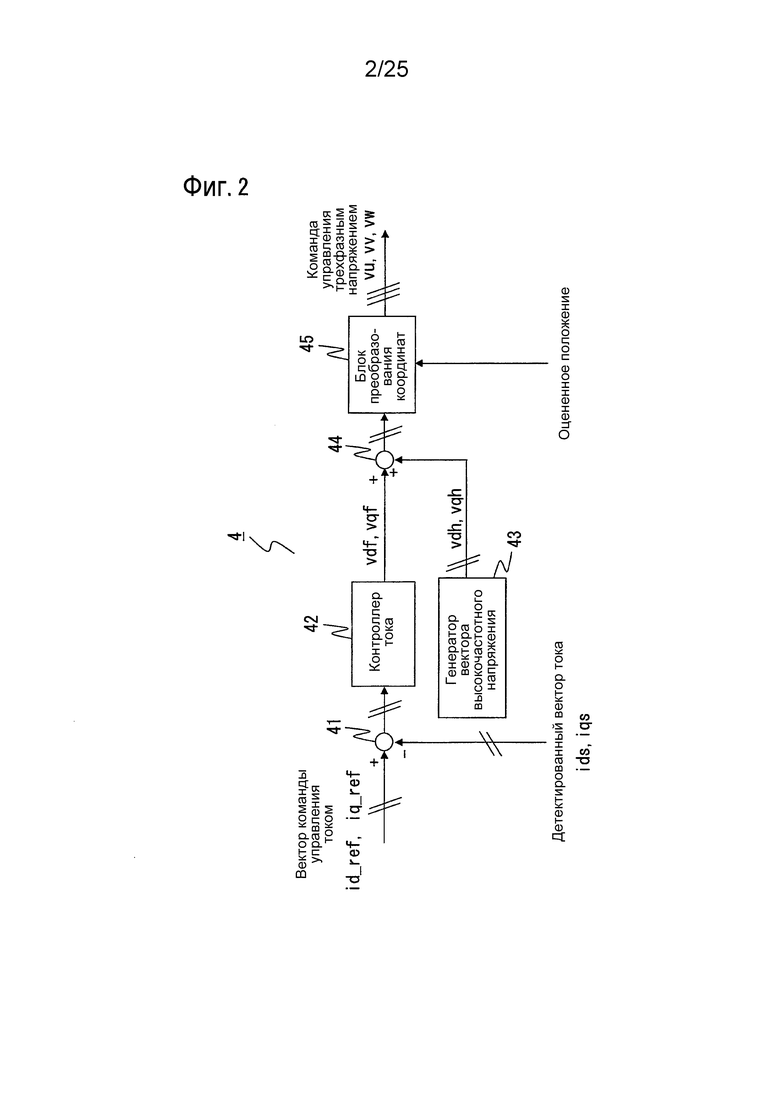
[0018] Далее, основываясь на фиг. 2, будут описаны конфигурация, назначение и работа блока 4 управления.
Блок 4 управления состоит из сумматора-вычитателя 41, контроллера 42 тока, генератора 43 вектора высокочастотного напряжения, сумматора-вычитателя 44 и блока 45 преобразования координат.
В блоке 4 управления сумматор-вычитатель 41 вычитает детектированный вектор (ids, iqs) тока из вектора (id_ref, iq_ref) команды управления током, заданного извне.
Контроллер 42 тока выполняет пропорциональное интегральное управление так, чтобы отклонение между вектором команды управления током и детектированным вектором тока, выведенное из сумматора-вычитателя 41, стало нулем, и выводит вектор (vdf, vqf) напряжения основной волны. Генератор 43 вектора высокочастотного напряжения выводит вектор (vdh, vqh) высокочастотного напряжения на осях d-q.
Замечено, что в настоящем варианте осуществления 1 вектор высокочастотного напряжения устанавливается как vqh = 0, и таким образом является переменным напряжением, которое будет применяться только в направлении d-оси.
Сумматор-вычитатель 44 суммирует вектор (vdf, vqf) напряжения основной волны и вектор (vdh, vqh) высокочастотного напряжения, и таким образом выводит вектор (vd, vq) команды управления напряжением на осях d-q. Затем, при использовании оцененного положения θ0, описанного позже, блок 45 преобразования координат преобразовывает вектор (vd, vq) команды управления напряжением на осях d-q, выведенный из сумматора-вычитателя 44, в вектор (vu, vv, vw) команды управления напряжением в неподвижной системе координат на основании осей d-q, и выводит вектор (vu, vv, vw) команды управления напряжением.
[0019] Блок 5 приложения напряжения подает трехфазное напряжение, основываясь на векторе (vu, vv, vw) команды управления напряжением, выведенном из блока 4 управления, к вращающейся машине 2 переменного тока.
[0020] Далее будут описаны конфигурация, назначение и работа блока 6 вычисления вектора отклонения.
Блок 6 вычисления вектора отклонения состоит из сумматора-вычитателя 61 и сумматора-вычитателя 62.
В блоке 6 вычисления вектора отклонения сумматор-вычитатель 61 вычитает детектированный вектор (ids, iqs) тока, выведенный из блока 3 детектирования вектора тока, из оцененного вектора (ids0, iqs0) тока, выведенного из блока 8 адаптивного наблюдения, описанного позже, и таким образом выводит вектор (eids, eiqs) отклонения тока. Кроме того, сумматор-вычитатель 62 вычитает детектированный вектор (ϕdrD, ϕqrD) магнитного потока, выведенный из блока детектирования вектора магнитного потока, описанного позже, из оцененного вектора (ϕdr0, ϕqr0) магнитного потока, выведенного из блока 8 адаптивного наблюдения, описанного позже, и таким образом выводит вектор (eϕdr, eϕqr) отклонения магнитного потока.
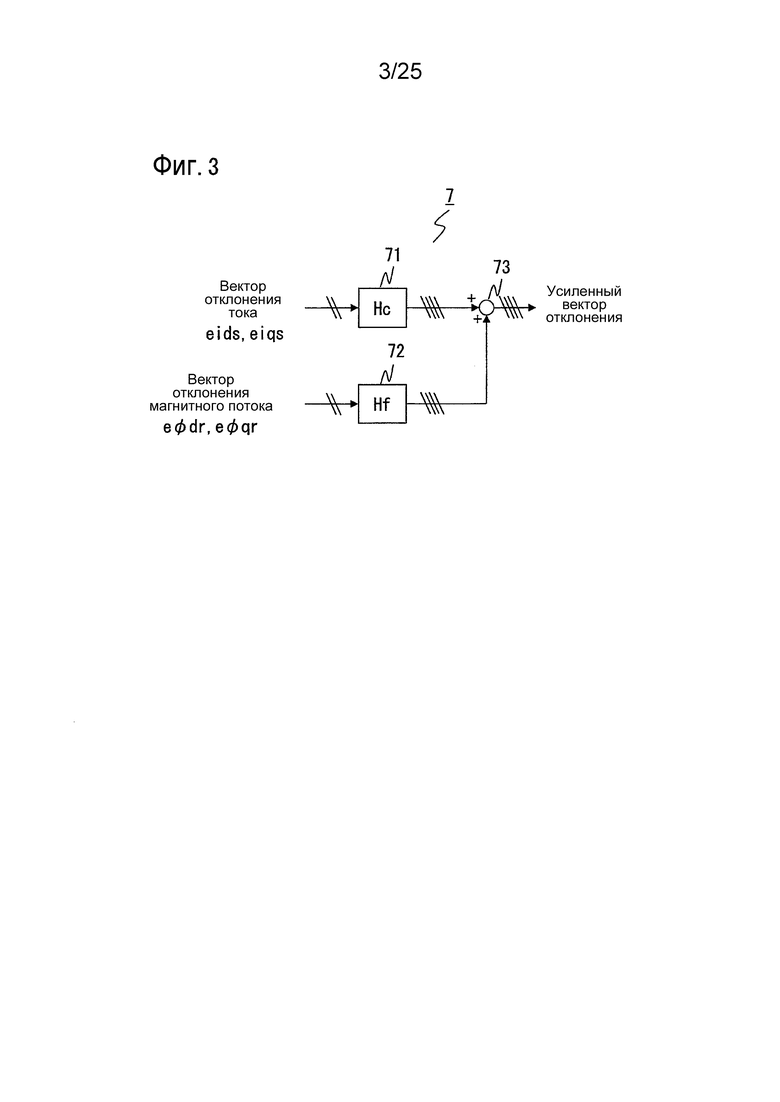
[0021] Далее, основываясь на фиг. 3, будут описаны конфигурация, назначение и работа блока 7 усиления отклонения.
Блок 7 усиления отклонения состоит из блоков 71 и 72 вычисления матрицы коэффициентов усиления и сумматора-вычитателя 73.
Блок 71 вычисления матрицы коэффициентов усиления умножает (eids, eiqs)T (T означает транспонированную матрицу), которая является транспонированной матрицей вектора (eids, eiqs) отклонения тока, на матрицу He, и выводит результат. Блок 72 вычисления матрицы коэффициентов усиления умножает вектор (eϕdr, eϕqr)T отклонения магнитного потока на матрицу Hf, и выводит результат.
В данном случае матрицы He и Hf являются матрицами коэффициентов усиления, определенными с помощью выражения (1). В выражении (1) h11-h44 являются коэффициентами усиления, и значения h11-h44 могут свободно устанавливаться.
[0022] [Математическое выражение 1]
[0023] На фиг. 3 сумматор-вычитатель 73 суммирует вектор, выведенный из блока 71 вычисления матрицы коэффициентов усиления, и вектор, выведенный из блока 72 вычисления матрицы коэффициентов усиления, и таким образом выводит усиленный вектор (e1, e2, e3, e4)T отклонения.
Замечено, что когда скорость вращения вращающейся машины 2 переменного тока является высокой, блок 8 адаптивного наблюдения, описанный позже, может удовлетворительно оценивать оцененную скорость и оцененное положение, которые будут выводиться, не используя вектор отклонения магнитного потока, который является отклонением между детектированным вектором магнитного потока и оцененным вектором магнитного потока. Поэтому, в случае, когда абсолютное значение оцененной скорости является большим, значения h13-h44 устанавливаются в нуль в блоке 72 вычисления матрицы коэффициентов усиления так, чтобы выход блока 72 вычисления матрицы коэффициентов усиления в области высокой скорости вращения стал нулем. В результате с помощью прекращения вычислений в блоке 9 детектирования вектора магнитного потока, количество вычислений может сокращаться. Кроме того, также с помощью установки в нуль вектора (vdh, vqh) высокочастотного напряжения, выведенного из генератора 43 вектора высокочастотного напряжения в блоке 4 управления, предотвращается возникновение высокочастотного тока, который был бы вызван вектором (vdh, vqh) высокочастотного напряжения, посредством чего потери из-за высокочастотного тока могут исключаться.
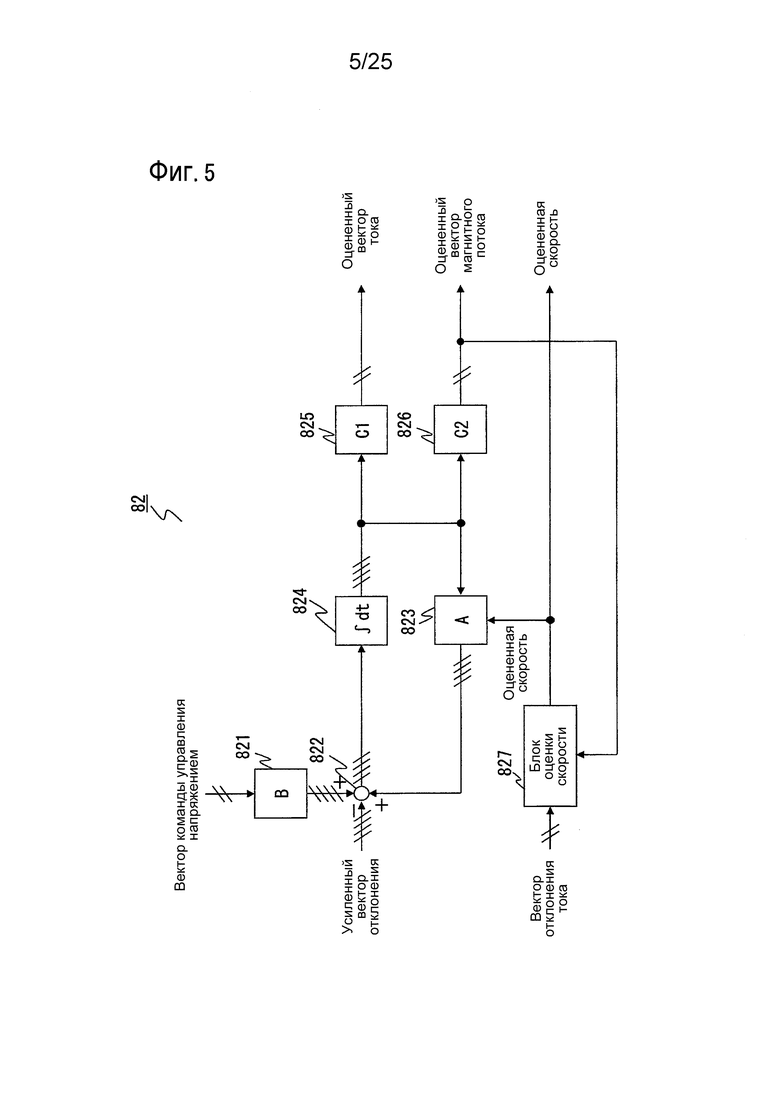
[0024] Далее будут описаны конфигурация, назначение и работа блока 8 адаптивного наблюдения. Фиг. 4 - схема конфигурации блока 8 адаптивного наблюдения, и фиг. 5 - схема конфигурации блока 82 наблюдения состояния, который является основным составляющим элементом блока 8 адаптивного наблюдения.
На фиг. 4 блок 8 адаптивного наблюдения состоит из блока 81 преобразования координат, блока 82 наблюдения состояния и блока 83 интегрирования.
На фиг. 5 блок 82 наблюдения состояния состоит из блоков 821, 823, 825 и 826 вычисления матрицы коэффициентов усиления, сумматора-вычитателя 822, блока 824 интегрирования и блока 827 оценки скорости.
[0025] Далее будет описана работа всего блока 8 адаптивного наблюдения.
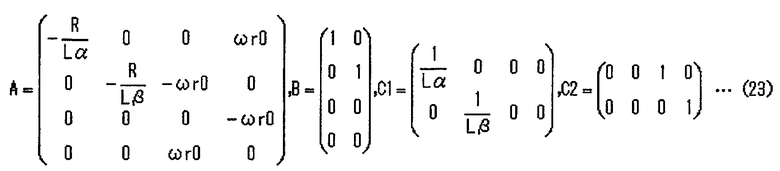
Применительно к вращающейся машине 2 переменного тока, сопротивление якоря установлено в R, индуктивность якоря в направлении d-оси установлена в Ld, индуктивность якоря в направлении q-оси установлена в Lq, оцененная скорость установлена в ωr0, угловая частота источника питания установлена в ω, и матрицы A, B, C1 и C2 определяются с помощью выражения (2).
Замечено, что в случае, когда вращающаяся машина 2 переменного тока является машиной без характерного признака, выполняется Ld=Lq.
[0026] [Математическое выражение 2]
[0027] Кроме того, компонента d-оси и компонента q-оси оцененного вектора отклика якоря на осях d-q, соответственно, определяются как ϕds0 и ϕqs0, и компонента d-оси и компонента q-оси вектора команды управления напряжением на осях d-q, соответственно, определяются как vds и vqs. В этом случае оцененный вектор (ϕds0, ϕqs0) отклика якоря и оцененный вектор (ϕdr0, ϕqr0) магнитного потока могут быть получены, как показано с помощью выражения (3).
[0028] [Математическое выражение 3]

[0029] Кроме того, когда оператор Лапласа (дифференциальный оператор) определен как s, kp определен как коэффициент пропорционального усиления, и ki определен как интегральный коэффициент усиления, оцененная скорость ωr0, которая является внутренним параметром матрицы A в выражении (2), задается с помощью выражения (4), используя вектор (eids, eiqs) отклонения тока и оцененный вектор (ϕdr0, ϕqr0) магнитного потока.
[0030] [Математическое выражение 4]

[0031] Оцененное положение θ0 может быть получено с помощью интегрирования оцененной скорости ωr0, как показано с помощью выражения (5).
[0032] [Математическое выражение 5]
[0033] Кроме того, оцененный вектор (ids0, iqs0) тока может рассчитываться с помощью выражения (6).
[0034] [Математическое выражение 6]

[0035] Точно так же оцененный вектор (ϕdr0, ϕqr0) магнитного потока может рассчитываться с помощью выражения (7).
[0036] [Математическое выражение 7]
[0037] Как описано выше, при использовании выражений (2) - (7), оцененное положение θ0, оцененный вектор (ids0, iqs0) тока и оцененный вектор (ϕdr0, ϕqr0) магнитного потока могут рассчитываться, основываясь на векторе (vds, vqs) команды управления напряжением, усиленном векторе (e1, e2, e3, e4)T отклонения и векторе (eids, eiqs) отклонения тока.
Приведенное выше является описанием работы всего блока 8 адаптивного наблюдения.
[0038] Далее будут описаны назначение и работа каждого основного составляющего элемента блока 8 адаптивного наблюдения.
На фиг. 4 блок 81 преобразования координат преобразовывает трехфазный вектор команды управления напряжением переменного тока, выведенный из блока 4 управления, в вектор (vds, vqs) команды управления напряжением на осях d-q, которые являются ортогональной вращающейся системой координат, и выводит вектор (vds, vqs) команды управления напряжением к блоку 82 наблюдения состояния. Блок 82 наблюдения состояния вычисляет и выводит оцененную скорость ωr0, оцененный вектор (ids0, iqs0) тока и оцененный вектор (ϕdr0, ϕqr0) магнитного потока, основываясь на усиленном векторе (e1, e2, e3, e4)T отклонения, выведенном из блока 7 усиления отклонения, и векторе (vds, vqs) команды управления напряжением, выведенном из блока 81 преобразования координат. Блок 83 интегрирования интегрирует оцененную скорость ωr0, выведенную из блока 82 наблюдения состояния, с помощью выражения (5), таким образом рассчитывая оцененное положение θ0.
[0039] На фиг. 5 блок 821 вычисления матрицы коэффициентов усиления умножает вектор (vds, vqs)T команды управления напряжением, выведенный из блока 81 преобразования координат, на матрицу B, и выводит результат. Сумматор-вычитатель 822 выводит вектор, полученный с помощью суммирования и вычитания между собой выхода блока 821 вычисления матрицы коэффициентов усиления, выхода блока 823 вычисления матрицы коэффициентов усиления, и усиленного вектора (e1, e2, e3, e4)T отклонения. Блок 824 интегрирования интегрирует каждый элемент вектора, выведенного из сумматора-вычитателя 822, и выводит вектор (ϕds0, ϕqs0, ϕdr0, ϕqr0)T. Приведенное выше соответствует правой стороне выражения (3). Замечено, что левая сторона выражения (3) соответствует входу блока 824 интегрирования.
Блок 825 вычисления матрицы коэффициентов усиления умножает вектор (ϕds0, ϕqs0, ϕdr0, ϕqr0)T на матрицу C1 и таким образом выводит оцененный вектор (ϕds0, ϕqs0)T тока. Это соответствует выражению (6).
В данном случае вектор (ϕds0, ϕqs0, ϕdr0, ϕqr0)T является оцененным вектором магнитного потока статора/ротора.
Блок 826 вычисления матрицы коэффициентов усиления умножает вектор (ϕds0, ϕqs0, ϕdr0, ϕqr0)T на матрицу C2, и таким образом выводит оцененный вектор (ϕdr0, ϕqr0)T магнитного потока. Это соответствует выражению (7).
Блок 827 оценки скорости вычисляет оцененную скорость ωr0 с помощью выражения (4), используя вектор (eids, eiqs) отклонения тока и оцененный вектор (ϕdr0, ϕqr0) магнитного потока.
Блок 823 вычисления матрицы коэффициентов усиления принимает оцененную скорость ωr0, выведенную из блока 827 оценки скорости, применяет матрицу к вектору (ϕds0, ϕqs0, ϕdr0, ϕqr0)T, выведенному из блока 824 интегрирования, и выводит результат к сумматору-вычитателю 822.
[0040] Приведенное выше является описанием назначения и работы всего блока 8 адаптивного наблюдения и каждого его основного составляющего элемента. Особенностью этого блока 8 адаптивного наблюдения является то, что усиленный вектор (e1, e2, e3, e4)T отклонения включает в себя e3 и e4, полученные с помощью усиления вектора (ϕdr, eϕqr) отклонения магнитного потока, посредством чего оцененная скорость ωr0 и оцененное положение θ0 могут удовлетворительно рассчитываться в области низкой скорости, включающей в себя нулевую скорость.
[0041] Так как на детектированный вектор магнитного потока, выведенный из блока 9 детектирования вектора магнитного потока, описанного позже, не оказывает влияния постоянная ошибка или ошибка напряжения в области от нулевой скорости до низкой скорости, блок 8 адаптивного наблюдения настоящего варианта осуществления может удовлетворительно оценивать скорость и положение даже в области от нулевой скорости до низкой скорости с помощью вычисления вектора отклонения магнитного потока, который является отклонением между детектированным вектором магнитного потока и оцененным вектором магнитного потока, и используя e3 и e4, полученные с помощью усиления вектора отклонения магнитного потока.
[0042] Далее будут описаны конфигурация, назначение и работа блока 9 детектирования вектора магнитного потока, основываясь на фиг. 6-10.
Сначала будет описана конфигурация блока 9 детектирования вектора магнитного потока.
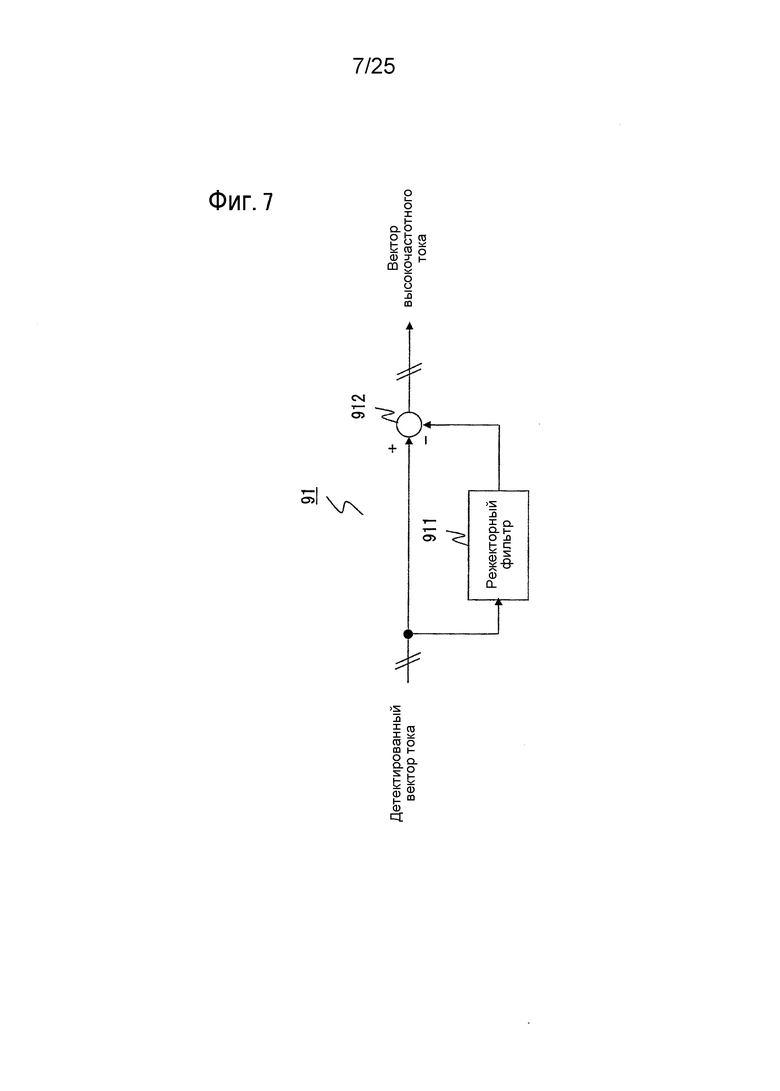
На фиг. 6, показывающей схему конфигурации блока 9 детектирования вектора магнитного потока, блок 9 детектирования вектора магнитного потока состоит из фильтра 91, блока 92 извлечения ортогональной компоненты и блока 93 вычисления детектированного вектора магнитного потока.
Как показано на фиг. 7, фильтр 91 состоит из режекторного фильтра 911 и сумматора-вычитателя 912. Как показано на фиг. 8, блок 92 извлечения ортогональной компоненты состоит из блока 921 выбора ортогональной компоненты и блока 922 вычисления амплитуды. Как показано на фиг. 9, блок 92 извлечения ортогональной компоненты состоит из блока 931 вычисления разности, блока 932 вычисления косинуса, блока 933 вычисления синуса и множительных устройств 934 и 935.
[0043] Далее будут описаны назначение и работа блока 9 детектирования вектора магнитного потока. Сначала будет описана работа всего блока 9 детектирования вектора магнитного потока, и затем будут описаны назначение и работа каждого составляющего элемента.
[0044] Будет описано математическое выражение вектора высокочастотного тока, текущего во вращающейся машине 2 переменного тока, когда генератор 43 вектора высокочастотного напряжения на фиг. 2 выводит вектор (vdh, vqh) высокочастотного напряжения.
Как показано на фиг. 10, система координат, вращающаяся в синхронизации с ротором вращающейся машины 2 переменного тока, сформированная с помощью блока 4 управления, установлена в качестве ортогональных координатных осей d-q. То же самое направление, как вектор Φr магнитного потока ротора вращающейся машины 2 переменного тока, установлено в качестве dm-оси, и направление, ортогональное к нему, установлено в качестве qm-оси. Разность между d-осью ортогональной системы координат и dm-осью вектора магнитного потока ротора установлена как Δθ. Замечено, что d-ось является направлением оцененного положения θ0, выведенным из блока 8 адаптивного наблюдения. В установившемся состоянии работа выполняется таким образом, что d-ось совпадает с dm-осью. Фиг. 10 показывает случай, когда отклонение Δθ возникает мгновенно.
В этом случае математическое выражение вращающейся машины 2 переменного тока, когда вектор (vdh, vqh) высокочастотного напряжения применяется на d-оси и q-оси, соответственно, может быть представлено как выражение (8). В данном случае p в выражении является дифференциальным оператором.
[0045] [Математическое выражение 8]
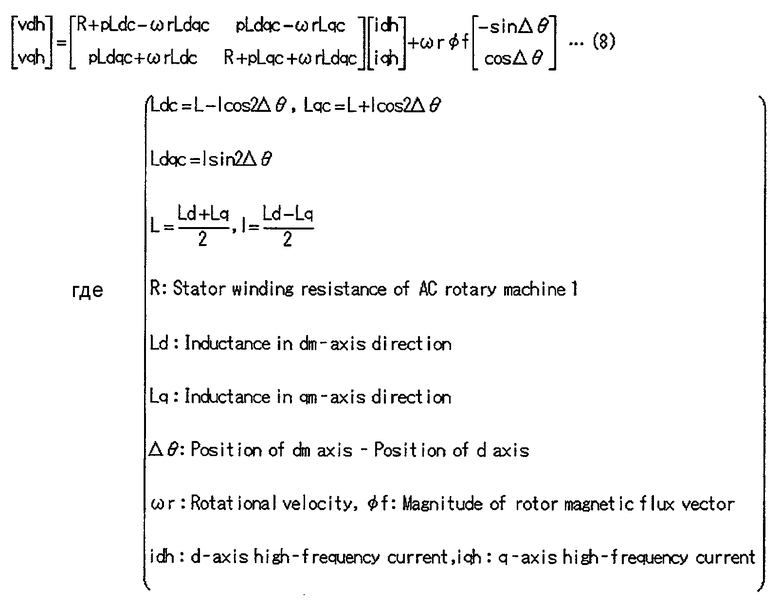
R: сопротивление обмотки статора вращающейся машины 1 переменного тока
Ld: индуктивность в направлении dm-оси
Lq: индуктивность в направлении qm-оси
Δθ: положение dm-оси - положение d-оси
ωr: скорость вращения, ϕf: величина вектора магнитного потока ротора
idh: высокочастотный ток d-оси, iqh: высокочастотный ток q-оси.
[0046] Как описано выше, вектор высокочастотного напряжения применяется только в области от нулевой скорости до низкой скорости. Поэтому, если скорость вращения установлена в ωr 0, то может быть получено выражение (9).
0, то может быть получено выражение (9).
[0047] [Математическое выражение 9]
[0048] Дополнительно, второй элемент на правой стороне является дифференциалом высокочастотного тока, и дифференциал высокочастотного тока умножают на угловую частоту ωh высокочастотного напряжения. Поэтому, выполняется условие, что второй элемент на правой стороне >> первого элемента на правой стороне, таким образом первый элемент на правой стороне может игнорироваться. В результате может быть получено выражение (10).
[0049] [Математическое выражение 10]

[0050] В данном случае, если вектор высокочастотного напряжения задан так, как показано с помощью выражения (11), то вектор (idh, iqh) высокочастотного тока представлен как выражение (12), подставляя выражение (11) в выражение (10) и интегрируя обе стороны.
[0051] [Математическое выражение 11]
[0052] [Математическое выражение 12]

[0053] Далее будет описан детектированный вектор магнитного потока. Как показано на фиг. 10, вектор Φr магнитного потока ротора направлен в том же самом направлении, как dm-ось. В данном случае вектор Φr магнитного потока ротора, который проецируется на направление, параллельное вектору высокочастотного напряжения, является ϕdrD в направлении d-оси, и на направление, ортогональное к вектору высокочастотного напряжения, является ϕqrD в направлении q-оси. Затем, ϕdrD и ϕqrD, спроецированные на d-ось и q-ось, устанавливают в качестве детектированного вектора магнитного потока, и его математические выражения могут быть представлены как выражение (13).
[0054] [Математическое выражение 13]
[0055] В выражении (13) ϕf является величиной вектора Φr магнитного потока ротора. В случае синхронной машины с постоянными магнитами, хотя ϕf немного изменяется в зависимости от температуры, ϕf может быть известна с помощью предварительного измерения ϕf. В случае индукционной машины или синхронной машины с обмоткой возбуждения, ϕf может рассчитываться из величины тока возбуждения или тока намагничивания. Таким образом ϕf является известным значением.
Поскольку ϕf является известным значение, необходимо знать только Δθ для вычисления детектированного вектора магнитного потока из выражения (13).
[0056] В данном случае будет обсуждаться способ вычисления Δθ. Так как Δθ является разностью между d-осью и dm-осью, Δθ может вычисляться с помощью получения положения d-оси и положения dm-оси. Положением d-оси является оцененное положение θ0, выведенное из блока 8 адаптивного наблюдения, и поэтому известно. Однако положение (в дальнейшем называют θdm) dm-оси не известно, и поэтому должно рассчитываться другим способом.
Например, как раскрыто в международной публикации № WO 2009-040965, оцененное положение, рассчитанное с помощью наложения высокочастотного напряжения, которое предоставляет возможность соответствующей оценки положения направления dm-оси даже в области от нулевой скорости до низкой скорости, используется в качестве θdm, посредством чего Δθ может рассчитываться. Однако в случае вычисления Δθ с помощью раскрытого способа, необходимо вновь обеспечивать блок оценки положения для вычисления θdm, и поэтому количество вычислений сильно увеличивается.
[0057] В настоящем варианте осуществления 1, рассматривая выражение (12), величина вектора высокочастотного тока включает в себя Δθ. Поэтому, вместо выполнения оценки положения, хотя вектор высокочастотного напряжения накладывается, величина вектора высокочастотного тока извлекается, посредством чего вычисляется детектированный вектор магнитного потока.
В настоящем варианте осуществления 1 используется величина вектора iqh высокочастотного тока на q-оси, который ортогонален вектору высокочастотного напряжения.
Из выражения (12) величина |iqh| вектора iqh высокочастотного тока представлена с помощью выражения (14), и поэтому Δθ можно рассчитывать, как показано с помощью выражения (15).
[0058] [Математическое выражение 14]
[0059] [Математическое выражение 15]
[0060] Замечено, что величина |iqh| вектора высокочастотного тока может рассчитываться с помощью выражения (16). Поскольку угловая частота ωh и амплитуда Vh высокочастотного напряжения может свободно устанавливаться в генераторе 43 вектора высокочастотного напряжения, они являются известными значениями. L и l могут рассчитываться из Ld и Lq, как показано с помощью выражения (8). Кроме того, так как Ld и Lq могут быть известны с помощью их предварительного измерения, L и l также являются известными значениями. Замечено, что T в выражении (16) является периодом вектора (idh, iqh) высокочастотного тока.
[0061] [Математическое выражение 16]
[0062] Как описано выше, детектированные векторы ϕdrD и ϕqrD магнитного потока рассчитываются с помощью выражений (13), (15) и (16).
Замечено, что так как оцененное положение θ0, выведенное из блока 8 адаптивного наблюдения, равно или близко к направлению вектора Φr магнитного потока ротора, выполняется условие 2Δθ0, и sin2Δθ можно аппроксимировать как sin2Δθ2Δθ. Поэтому Δθ может рассчитываться, как показано с помощью выражения (17). В этом случае детектированный вектор (ϕdrD, ϕqrD) магнитного потока может рассчитываться из выражений (13), (16) и (17).
[0063] [Математическое выражение 17]
[0064] Приведенное выше является работой всего блока 9 детектирования вектора магнитного потока.
[0065] Далее будут описаны назначение и работа каждого составляющего элемента блока 9 детектирования вектора магнитного потока.
На фиг. 6 фильтр 91 предназначен для извлечения вектора высокочастотного тока из детектированного вектора тока, и он может быть любого типа, пока фильтр может извлекать ту же самую частотную компоненту, как вектор высокочастотного напряжения, из детектированного вектора тока. Например, как показано на фиг. 7, вектор высокочастотного тока может извлекаться при использовании режекторного фильтра, известного как фильтр ограничения диапазона, имеющего узкий диапазон. В режекторном фильтре 911 на фиг. 7, режекторный фильтр для устранения угловой частоты ωh высокочастотного вектора напряжения в выражении (18) применяют к детектированному вектору тока, посредством чего компонента угловой частоты ωh устраняется из детектированного вектора тока.
Сумматор-вычитатель 912 вычитает выход режектороного фильтра 911 из детектированного вектора тока, таким образом рассчитывая вектор высокочастотного тока, соответствующий компоненте угловой частоты ωh, из детектированного вектора тока. Замечено, что s в выражении (18) является оператором Лапласа, и qx - глубиной режекции.
[0066] [Математическое выражение 18]
[0067] На фиг. 8 в блоке 92 извлечения ортогональной компоненты блок 921 выбора ортогональной компоненты умножает вектор (idh, iqh) высокочастотного тока на матрицу (0, 1)T, таким образом выбирая только iqh, которая является компонентой, ортогональной к d-оси, вектора высокочастотного тока.
Блок 922 вычисления амплитуды выполняет расчет с помощью выражения (16) для вычисления |iqh|, которое является величиной (амплитудой) iqh, и выводит |iqh|.
[0068] В блоке 93 вычисления детектированного вектора магнитного потока на фиг. 9 блок 931 вычисления разности выполняет расчет с помощью выражения (15) или (17), используя |iqh|, выведенное из блока извлечения ортогональной компоненты, и таким образом выводит Δθ.
Блок 932 вычисления косинуса выполняет расчет косинуса, используя Δθ, выведенную из блока 931 вычисления разности, и таким образом выводит cosΔθ. Множительное устройство 934 умножает cosΔθ, выведенный из блока 932 вычисления косинуса, на величину ϕf магнитного потока ротора, и таким образом выводит ϕdrD, которая является компонентой детектированного вектора магнитного потока, параллельной вектору высокочастотного напряжения.
Блок 933 вычисления синуса выполняет расчет синуса, используя Δθ, выведенную из блока 931 вычисления разности, и таким образом выводит sinΔθ. Множительное устройство 935 умножает sinΔθ, выведенный из блока 933 вычисления синуса, на величину ϕf магнитного потока ротора, и таким образом выводит ϕqrD, которая является компонентой детектированного вектора магнитного потока, ортогональной к вектору высокочастотного напряжения.
Приведенное выше является описанием конфигурации, назначения и работы блока 19 детектирования вектора магнитного потока.
[0069] Далее будет описана модификация настоящего варианта осуществления 1.
В блоке 7 усиления отклонения на фиг. 3 матрицы He и Hf являются матрицами усиления, определенными с помощью выражения (1). В выражении (1) h11-h44 являются коэффициентами усиления, и значения h11-h44 могут свободно устанавливаться.
В данном случае, например, как описано на фиг. 9 патента Японии № 4672236, для h11-h42 матрицы He значение каждого коэффициента усиления может изменяться в зависимости от оцененной скорости ωr0. Кроме того, для h13-h44 матрицы Hf коэффициентов усиления значение каждого коэффициента усиления может изменяться в зависимости от оцененной скорости ωr0.
В этом случае, как показано с помощью схемы конфигурации модификации системы на фиг. 11, блок 8 адаптивного наблюдения также выводит оцененную скорость ωr0. Кроме того, как показано на фиг. 12, в блоке 70 усиления отклонения оцененная скорость ωr0 вводится в блоки 701 и 702 вычисления матрицы коэффициентов усиления.
На фиг. 12 сумматор-вычитатель 73 суммирует векторы, выведенные из блока 701 вычисления матрицы коэффициентов усиления и блока 702 вычисления матрицы коэффициентов усиления, и таким образом выводит усиленный вектор (e1, e2, e3, e4)T отклонения.
Кроме того, как описано выше, в случае, когда абсолютное значение оцененной скорости ωr0 является большим, значения h13 - h44 устанавливают в нуль в блоке 702 вычисления матрицы коэффициентов усиления так, чтобы выход блока 702 вычисления матрицы коэффициентов усиления в области высокой угловой скорости стал нулем.
[0070] Как описано выше, управляющее устройство 1 для вращающейся машины переменного тока согласно варианту осуществления 1 вычисляет вектор отклонения магнитного потока, который является отклонением между детектированным вектором магнитного потока и оцененным вектором магнитного потока, и вектор отклонения тока, который является отклонением между вектором детектированного тока и оцененным вектором тока, и использует усиленный вектор отклонения, полученный с помощью усиления вектора отклонения магнитного потока, таким образом делая возможным возбуждение вращающейся машиной переменного тока с помощью использования только одного из оцененной скорости или оцененного положения, выведенных из блока адаптивного наблюдения по диапазону от нулевой скорости до области высокой скорости. Поэтому необязательно побуждать и генератор фазы низкочастотной области, и генератор фазы высокочастотной области одновременно выполнять вычислительную обработку, поэтому количество вычислительной обработки может значительно сокращаться.
Дополнительно, при расчете детектированного вектора (ϕdrD, ϕqrD) магнитного потока, выведенного из блока детектирования вектора магнитного потока, вектор высокочастотного тока, имеющий ту же самую частотную компоненту, как вектор высокочастотного напряжения, извлекается из детектированного вектора тока. Из извлеченного вектора высокочастотного тока, при использовании величины |iqh | iqh, которая является компонентой, ортогональной к вектору высокочастотного напряжения, вычисляется разность Δθ, которую включает в себя |iqh|, между d-осью, на которой применяется вектор высокочастотного напряжения, и dm-осью, которая параллельна вектору магнитного потока ротора, и затем используются только Δθ и величина ϕf вектора магнитного потока ротора. Поэтому, необязательно предварительно подготавливать угол ротора для вычисления детектированного вектора магнитного потока, и поэтому обеспечивается эффект сокращения количества вычислений. Кроме того, так как отклик оценки угла ротора вообще не относится к расчету детектированного вектора магнитного потока, обеспечивается эффект поддержания на высоком уровне эффективности отклика, такого как отклик на управление скоростью или отклик на управление крутящим моментом.
[0071] Вариант осуществления 2
В управляющем устройстве для вращающейся машины переменного тока согласно варианту осуществления 2 при расчете детектированного вектора (ϕdrD, ϕqrD) магнитного потока блок 9 детектирования вектора магнитного потока извлекает из детектированного вектора тока вектор высокочастотного тока, имеющий ту же самую частотную компоненту, как вектор высокочастотного напряжения. Из извлеченного вектора высокочастотного тока при использовании величины |idh| idh, которая является компонентой, параллельной вектору высокочастотного напряжения, вычисляется разность Δθ, которую включает в себя |idh|, между d-осью, на которой применяется вектор высокочастотного напряжения, и dm-осью, которая параллельна вектору магнитного потока ротора, и затем используются только Δθ и величина ϕf вектора магнитного потока ротора.
[0072] В настоящем варианте осуществления 2 конфигурация является той же самой, как в варианте осуществления 1, за исключением блока детектирования вектора магнитного потока, поэтому опущено описание частей, кроме блока детектирования вектора магнитного потока.
В дальнейшем вариант осуществления 2 настоящего изобретения будет описан, основываясь на фиг. 13-15, показывающих схемы конфигурации и схему внутренней конфигурации блока 9 детектирования вектора магнитного потока в соответствии с управляющим устройством для вращающейся машины переменного тока.
На фиг. 13-15, компоненты, которые являются теми же самыми или соответствуют компонентам на фиг. 6-9 варианта осуществления 1, обозначены теми же самыми ссылочными символами.
[0073] Фиг. 13 - схема конфигурации блока 9 детектирования вектора магнитного потока настоящего варианта осуществления. На фиг. 13 частями, отличающимися от варианта осуществления 1, являются только блок 94 извлечения параллельной компоненты и блок 95 вычисления детектированного вектора магнитного потока. Фильтр 91 является тем же самым, как в варианте осуществления 1, поэтому его описание опущено.
Фиг. 14 - схема конфигурации блока 94 извлечения параллельной компоненты. Блок 941 выбора параллельной компоненты умножает вектор (idh, iqh) высокочастотного тока на матрицу (1, 0)T, таким образом выбирая только idh, который является вектором высокочастотного тока, параллельным d-оси. Блок 942 вычисления амплитуды вычисляет величину |idh| idh с помощью выражения (19) и выводит величину |idh|.
[0074]
[Математическое выражение 19]

[0075] Фиг. 15 - схема конфигурации блока 95 вычисления детектированного вектора магнитного потока. Из выражения (12) |idh|, выводимая из блока 94 извлечения параллельной компоненты, представлена с помощью выражения (20). Блок 951 вычисления разности выполняет расчет с помощью выражений (20) и (21), и вследствие этого выводит Δθ.
[0076] [Математическое выражение 20]
[0077] [Математическое выражение 21]
[0078] Блок 932 вычисления косинуса выполняет расчет косинуса, используя Δθ, выведенную из блока 951 вычисления разности, и таким образом выводит cosΔθ. Множительное устройство 934 умножает cosΔθ, выводимый из блока 932 вычисления косинуса, на величину ϕf магнитного потока ротора, и таким образом выводит результирующее значение как ϕdrD, который является детектированным вектором магнитного потока, параллельным вектору высокочастотного напряжения.
Блок 933 вычисления синуса выполняет расчет синуса, используя Δθ, выведенную из блока 951 вычисления разности, и таким образом выводит sinΔθ. Множительное устройство 935 умножает sinΔθ, выводимый из блока 933 вычисления синуса, на величину ϕf магнитного потока ротора, и таким образом выводит результирующее значение как ϕqrD, который является детектированным вектором магнитного потока, ортогональным к вектору высокочастотного напряжения.
[0079] Как описано выше, в управляющем устройстве для вращающейся машины переменного тока согласно варианту осуществления 2 при расчете детектированного вектора (ϕdrD, ϕqrD) магнитного потока, выведенного из блока 9 детектирования вектора магнитного потока, вектор высокочастотного тока, имеющий ту же самую частотную компоненту, как вектор высокочастотного напряжения, извлекается из детектированного вектора тока. Из извлеченного вектора высокочастотного тока с помощью использования величины |idh| idh, которая является компонентой, параллельной вектору высокочастотного напряжения, вычисляется разность Δθ, которую включает в себя |idh|, между d-осью, на которой применяется вектор высокочастотного напряжения, и dm-осью, которая параллельна вектору магнитного потока ротора, и затем используются только Δθ и величина ϕf вектора магнитного потока ротора. Поэтому, как в варианте осуществления 1, обеспечиваются эффект сокращения количества вычислений и эффект поддержания на высоком уровне эффективности отклика, такого как отклик управления скоростью или отклик управления крутящим моментом.
[0080] Вариант осуществления 3
В варианте осуществления 1 детектированный вектор тока, выведенный из блока детектирования вектора тока, является детектированным вектором тока на осях d-q, которые являются ортогональной системой координат, вращающейся в синхронизации с ротором вращающейся машины переменного тока, и блок управления, блок вычисления вектора отклонения, блок усиления отклонения, блок адаптивного наблюдения и блок детектирования вектора магнитного потока также конфигурируются на осях d-q.
С другой стороны, в настоящем варианте осуществления 3 детектированный вектор тока, выведенный из блока детектирования вектора тока, является детектированным вектором (iα, iβ) тока на осях α-β, которые известны как неподвижная ортогональная система координат, и блок управления, блок вычисления вектора отклонения, блок усиления отклонения, блок адаптивного наблюдения и блок детектирования вектора магнитного потока также конфигурируются на осях α-β.
[0081] В дальнейшем вариант осуществления 3 настоящего изобретения будет описан, основываясь на фиг. 16, показывающей схему конфигурации системы для управляющего устройства 10 для вращающейся машины переменного тока, фиг. 17, показывающей схему конфигурации блока управления, фиг. 18, показывающей схему внутренней конфигурации блока управления, фиг. 19, показывающей схему конфигурации блока адаптивного наблюдения, фиг. 20, показывающей схему внутренней конфигурации блока адаптивного наблюдения, фиг. 21, показывающей схему конфигурации блока детектирования вектора магнитного потока, фиг. 22-24, показывающих схемы внутренней конфигурации блока детектирования вектора магнитного потока, и фиг. 25, показывающей схему для объяснения вектора магнитного потока ротора.
[0082] Сначала будет описана конфигурация всей системы, включающей в себя управляющее устройство 10 для вращающейся машины переменного тока согласно варианту осуществления 3 настоящего изобретения.
На фиг. 16 управляющее устройство 10 для вращающейся машины переменного тока состоит из блока 13 детектирования вектора тока, блока 14 управления, блока 5 приложения напряжения, блока 6 вычисления вектора отклонения, блока 7 усиления отклонения, блока 18 адаптивного наблюдения и блока 19 детектирования вектора магнитного потока, для управления вращающейся машиной переменного тока 2.
На фиг. 16 компоненты, которые являются теми же самыми или соответствуют компонентам на фиг. 1, обозначены теми же самыми ссылочными символами.
[0083] Управляющее устройство 10 для вращающейся машины переменного тока варианта осуществления 3 отличается от управляющего устройства 1 для вращающейся машины переменного тока варианта осуществления 1 только в конфигурациях блока 13 детектирования вектора тока, блока 14 управления, блока 18 адаптивного наблюдения и блока 19 детектирования вектора магнитного потока. Поэтому, в дальнейшем, конфигурация, назначение и работа каждой составной части управляющего устройства 10 для вращающейся машины переменного тока будут описаны надлежащим образом, сосредотачиваясь на отличии.
[0084] Блок 13 детектирования вектора тока детектирует трехфазный ток, текущий во вращающейся машине 2 переменного тока, и выводит в качестве детектированного вектора (iα, iβ) тока ток iα α-оси и ток iβ β-оси, которые, соответственно, получены с помощью блока 131 преобразования координат, выполняющего преобразование координат трехфазного тока в направлении α-оси и в направлении β-оси на осях α-β, которые являются неподвижной ортогональной системой координат ротора вращающейся машины 2 переменного тока.
[0085] Далее будут описаны, основываясь на фиг. 17, конфигурация, назначение и работа блока 14 управления.
Блок 14 управления состоит из блока 141 преобразования координат, сумматора-вычитателя 142, контроллера 143 тока, блока 144 преобразования координат, генератора 145 вектора высокочастотного напряжения и сумматора-вычитателя 146.
Замечено, что вычисление с помощью блока 14 управления выполняется на осях d-q. Блок 141 преобразования координат преобразовывает детектированный вектор (iα, iβ) тока в вектор на осях d-q при использовании оцененного положения θ0, выведенного из блока 18 адаптивного наблюдения, описанного позже. Сумматор-вычитатель 142 вычитает детектированный вектор (ids, iqs) тока, выведенный из блока 141 преобразования координат, из вектора (id_ref, iq_ref) команды управления током, заданного извне. Контроллер 143 тока выполняет пропорциональное интегральное управление так, чтобы отклонение между вектором команды управления током и детектированным вектором тока, выведенным из сумматора-вычитателя 142, стало нулем, и выводит вектор (vdf, vqf) напряжения основной волны. Блок 144 преобразования координат преобразовывает вектор (vdf, vqf) напряжения основной волны в вектор (vuf, vvf, vwf) команды управления напряжением в неподвижной системе координат от осей d-q, при использовании оцененного положения θ0, и выводит вектор (vuf, vvf, vwf) команды управления напряжением.
В генераторе 145 вектора высокочастотного напряжения, как показано в схеме конфигурации генератора 145 вектора высокочастотного напряжения на фиг. 18, вектор (vαh, vβh) команды управления высокочастотным напряжением, представленный с помощью выражения (22) на α-β осях, которые являются неподвижной ортогональной системой координат, задается, и затем преобразовывается в вектор (vuh, vvh, vwh) команды управления высокочастотным напряжением в неподвижной системе координат с помощью блока 401 преобразования координат, и затем выводится векторная команда (vuh, vvh, vwh) управления высокочастотным напряжением.
В настоящем варианте осуществления 3, так как векторная команда управления высокочастотным напряжением задается таким образом, векторная команда управления высокочастотным напряжением вращающегося напряжения может задаваться в отличие от переменного напряжения варианта осуществления 1.
[0086] [Математическое выражение 22]

[0087] Сумматор-вычитатель 146 суммирует вектор (vuf, vvf, vwf) команды управления напряжением, выведенный из блока 144 преобразования координат, и векторную команду (vuh, vvh, vwh) управления высокочастотным напряжением, и таким образом выводит вектор (vu, vv, vw) команды управления напряжением.
[0088] Далее будет описан блок 6 вычисления вектора отклонения.
Блок 6 вычисления вектора отклонения, как в варианте осуществления 1, хотя его ввод и вывод изменены с осей d-q на оси α-β, выводит вектор (eiα, eiβ) отклонения тока, который является разностью между оцененным вектором (iα0, iβ0) тока и детектированным вектором (iα, iβ) тока, и вектор (eϕαr, eϕβr) отклонения магнитного потока, который является разностью между оцененным вектором (ϕαr0, ϕβr0) магнитного потока и детектированным вектором (ϕαrD, ϕβrD) магнитного потока.
[0089] Далее будет описан блок 7 усиления отклонения.
Также блок 7 усиления отклонения, как в варианте осуществления 1, хотя его ввод и вывод изменены с осей d-q на оси α-β, выводит усиленный вектор (e1, e2, e3, e4) отклонения, полученный с помощью суммирования вектора (eiα, eiβ) отклонения тока, умноженного на матрицу Hc выражения (1), и вектора (eϕαr, eϕβr) отклонения магнитного потока, умноженного на матрицу Hf выражения (1).
[0090] Далее будет описан блок 18 адаптивного наблюдения. Также для блока 18 адаптивного наблюдения базовая конфигурация является той же самой, как конфигурация блока 8 адаптивного наблюдения варианта осуществления 1, но матрица A и матрица C1 в ней отличаются.
Фиг. 19 - схема конфигурации блока 18 адаптивного наблюдения, и фиг. 20 - схема конфигурации блока 182 наблюдения состояния, который является основным составляющим элементом блока 18 адаптивного наблюдения.
На фиг. 19 блок 18 адаптивного наблюдения состоит из блока 181 преобразования координат, блока 182 наблюдения состояния и блока 183 интегрирования.
На фиг. 20 блок 182 наблюдения состояния состоит из блоков 831, 833, 835 и 836 вычисления матрицы коэффициентов усиления, сумматора-вычитателя 832, блока 834 интегрирования и блока 837 оценки скорости.
[0091] Далее будет описана работа всего блока 18 адаптивного наблюдения.
В блоке 18 адаптивного наблюдения следующие выражения (23)-(25), соответственно, соответствуют вычислениям с помощью выражений (2)-(4) в блоке 8 адаптивного наблюдения варианта осуществления 1, и следующие выражения (26) и (27), соответственно, соответствуют вычислениям с помощью выражений (6) и (7).
[0092] [Математическое выражение 23]
[0093] [Математическое выражение 24]

[0094] [Математическое выражение 25]

[0095] [Математическое выражение 26]
[0096] [Математическое выражение 27]

[0097] Далее будут описаны назначение и работа каждого основного составляющего элемента блока 18 адаптивного наблюдения.
На фиг. 19 блок 181 преобразования координат преобразовывает вектор команды управления трехфазным напряжением переменного тока, выведенный из блока 14 управления, в вектор (vαs, vβs) команды управления напряжением на осях α-β, которые являются неподвижной ортогональной системой координат, и выводит вектор (vαs, vβs) команды управления напряжением к блоку 182 наблюдения состояния. В блоке 182 наблюдения состояния на фиг. 20 блок 831 вычисления матрицы коэффициентов усиления умножает вектор (vαs, vαs)T команды управления напряжением, выведенный из блока 181 преобразования координат, на матрицу B выражения (23), и выводит результат. Сумматор-вычитатель 832 выводит вектор, полученный с помощью суммирования и вычитания между собой выходов блока 831 вычисления матрицы коэффициентов усиления, выходов блока 833 вычисления матрицы коэффициентов усиления, и усиленного вектора (e1, e2, e3, e4)T отклонения. Блок 834 интегрирования интегрирует каждый элемент вектора, выведенного из сумматора-вычитателя 832, и выводит результирующее значение в качестве вектора (ϕαs0, ϕβs0, ϕαr0, ϕβr0)T. Приведенное выше соответствует правой стороне выражения (24). Левая сторона выражения (24) соответствует вводу блока 834 интегрирования.
Блок 835 вычисления матрицы коэффициентов усиления умножает вектор (ϕαs0, ϕβs0, ϕαr0, ϕβr0)T на матрицу C1 выражения (23) и таким образом выводит оцененный вектор (ϕαs0, ϕβs0)T тока. Это соответствует выражению (26).
В данном случае вектор (ϕαs0, ϕβs0, ϕαr0, ϕβr0)T является оцененным вектором магнитного потока статора/ротора.
Блок 836 вычисления матрицы коэффициентов усиления умножает вектор (ϕαs0, ϕβs0, ϕαr0, ϕβr0)T на матрицу C2 и таким образом выводит оцененный вектор (ϕαr0, ϕβr0)T магнитного потока. Это соответствует выражению (27).
Блок 833 вычисления матрицы коэффициентов усиления принимает оцененную скорость ωr0, выведенную из блока 837 оценки скорости, применяет матрицу к вектору (ϕαs0, ϕβs0, ϕαr0, ϕβr0)T, выведенному из блока 834 интегрирования, и выводит результат к сумматору-вычитателю 832.
Блок 183 интегрирования на фиг. 19, как в варианте осуществления 1, интегрирует оцененную скорость ωr0, выведенную из блока 182 наблюдения состояния, с помощью выражения (5), таким образом рассчитывая оцененное положение θ0.
Приведенное выше является описанием конфигурации, назначения и работы блока 18 адаптивного наблюдения.
[0098] Далее будут описаны конфигурация, назначение и работа блока 19 детектирования вектора магнитного потока, основываясь на фиг. 21-25.
Сначала будут описана конфигурация блока 19 детектирования вектора магнитного потока.
На фиг. 21, показывающей схему конфигурации блока 19 детектирования вектора магнитного потока, блок 19 детектирования вектора магнитного потока состоит из фильтра 91, блока 192 извлечения компонента α-оси, блока 193 извлечения компонента β-оси и блока 194 вычисления детектированного вектора магнитного потока.
Как показано на фиг. 22, блок 192 извлечения компоненты α-оси состоит из блока 961 выбора компоненты α-оси и блока 962 вычисления амплитуды. Как показано на фиг. 23, блок 193 извлечения компоненты β-оси состоит из блока 963 выбора компоненты β-оси и блока 964 вычисления амплитуды. Как показано на фиг. 24, блок 194 вычисления детектированного вектора магнитного потока состоит из блока 965 вычисления разности, блока 966 вычисления косинуса, блока 967 вычисления синуса и множительных устройств 968 и 969.
[0099] Далее будут описаны назначение и работа блока 19 детектирования вектора магнитного потока. Сначала будет описана работа всего блока 19 детектирования вектора магнитного потока, и затем будут описаны назначение и работа каждого составляющего элемента.
[0100] Математическое выражение на осях α-β вращающейся машины 2 переменного тока, когда вектор (vαh, vβh) высокочастотного напряжения применяется к нему с помощью генератора 145 вектора высокочастотного напряжения на фиг. 17, может быть представлено как выражение (28). В данном случае p в выражении является дифференциальным оператором.
[0101] [Математическое выражение 28]

[0102] Как в варианте осуществления 1, вектор высокочастотного напряжения применяется только в области от нулевой скорости до низкой скорости. Поэтому, если скорость вращения установлена в ωr0, то может быть получено выражение (29).
[0103] [Математическое выражение 29]
[0104] Дополнительно, второй элемент на правой стороне является дифференциалом высокочастотного тока, и дифференциал высокочастотного тока умножается на угловую частоту ωh высокочастотного напряжения. Поэтому выполняется условие, что второй элемент на правой стороне >> первого элемента на правой стороне, таким образом первый элемент на правой стороне может игнорироваться. В результате может быть получено выражение (30).
[0105] [Математическое выражение 30]

[0106] В данном случае, так как вектор (vαh, vβh) высокочастотного напряжения задается с помощью выражения (22), вектор (iαh, iαh) высокочастотного тока представлен как выражение (31), подставляя выражение (22) в выражение (30) и интегрируя обе стороны.
[0107] [Математическое выражение 31]

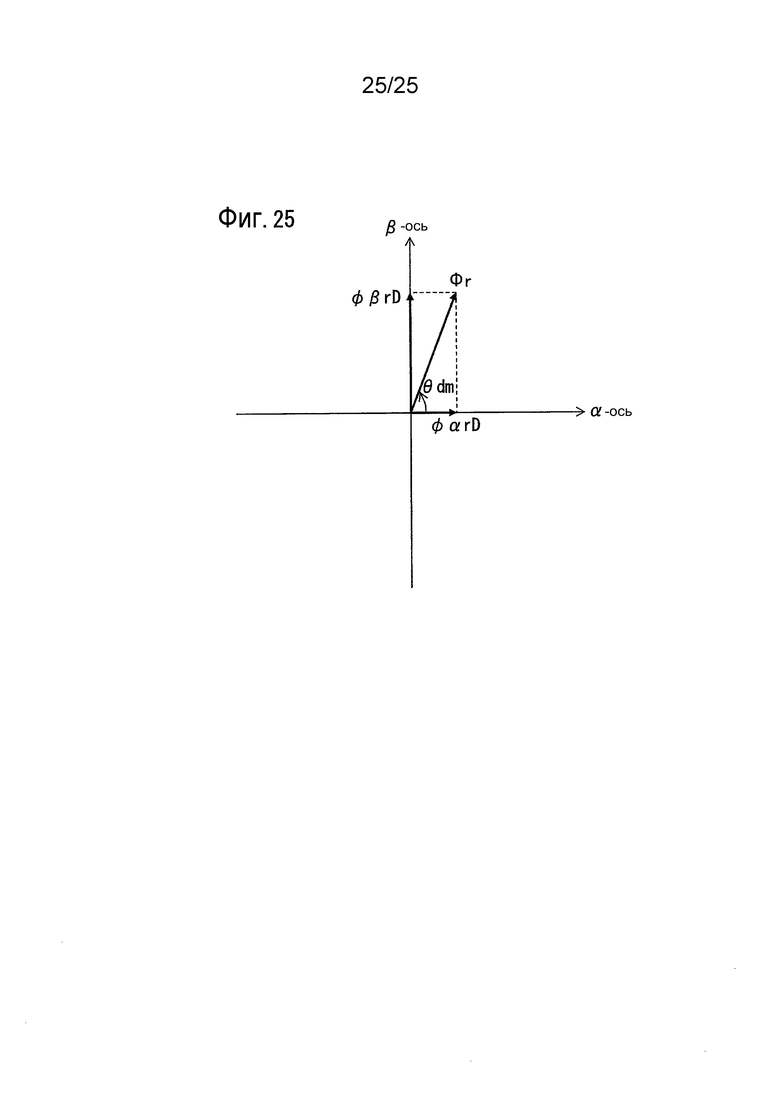
[0108] Далее будет описан детектированный вектор магнитного потока. Как показано на фиг. 25, в заданный момент вектор Φr магнитного потока ротора и α-ось имеют зависимость, показанную на фиг. 25, и угол между ними установлен в θdm. Так как положение ротора установлено в направлении, параллельном вектору магнитного потока ротора, положение ротора, если смотреть с α-оси - θdm. Как описано выше, в настоящем варианте осуществления 3, так как блок 6 вычисления вектора отклонения вычисляет вектор отклонения магнитного потока на осях α-β, детектированный вектор магнитного потока, выведенный из блока 19 детектирования вектора магнитного потока, находится на осях α-β. На фиг. 25, изображающей вектор магнитного потока ротора, компонента, спроецированная в направлении α-оси, установлена в ϕαrD, и компонента, спроецированная в направлении β-оси, установлена в ϕβrD. Затем, ϕαrD и ϕβrD рассчитываются с помощью выражения (32), и детектированный вектор (ϕαrD, ϕβrD) магнитного потока выводится из блока 19 детектирования вектора магнитного потока.
[0109] [Математическое выражение 32]
[0110] В выражении (32) ϕf является величиной вектора Φr магнитного потока ротора и поэтому является известным значением. Необходимо только знать θdm для вычисления компонент ϕαrD и ϕβrD детектированного вектора магнитного потока из выражения (32).
Изучая выражение (31), так как величина вектора (iαh, iβh) высокочастотного тока включает в себя θdm, θdm может рассчитываться из величины вектора (iαh, iβh) высокочастотного тока. Когда величина высокочастотного iαh тока на α-оси установлена в |iαh| и величина высокочастотного тока iβh на β-оси установлена в |iβh|, |iαh| и |iβh| представлены с помощью выражения (33).
[0111] [Математическое выражение 33]
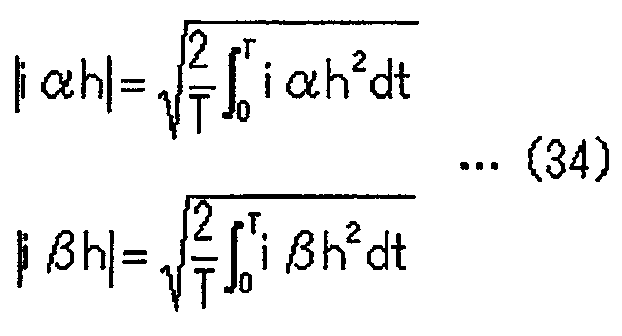
[0112] Кроме того, величины |iαh| и |iβh| могут рассчитываться с помощью выражения (34), используя вектор (iαh, iβh) высокочастотного тока. В данном случае T в выражении (34) является периодом вектора (iαh, iβh) высокочастотного тока.
[0113] [Математическое выражение 34]
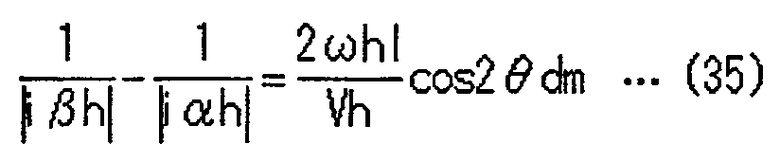
[0114] Из выражения (33) результат вычитания обратной величины |iαh| из обратной величины |iβh| представлен с помощью выражения (35). Из выражения (35) θdm может рассчитываться, как показано с помощью выражения (36).
[0115] [Математическое выражение 35]
[0116] [Математическое выражение 36]
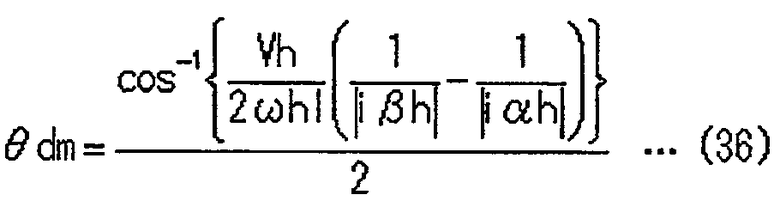
[0117] Таким образом, детектированный вектор (ϕαrD, ϕβrD) магнитного потока может рассчитываться с помощью выражений (32) и (36).
Приведенное выше является работой всего блока 19 детектирования вектора магнитного потока.
[0118] Далее будут описаны назначение и работа каждого составляющего элемента блока 19 детектирования вектора магнитного потока.
Фильтр 91 на фиг. 21 является тем же самым, как в варианте осуществления 1, за исключением того, что его ввод и вывод изменяется на детектированный вектор тока и вектор высокочастотного тока на осях α-β. Фильтр 91 выводит вектор (iαh, iβh) высокочастотного тока, основываясь на детектированном векторе (iαs, iβs) тока.
Как показано на фиг. 22, в блоке 192 извлечения компоненты α-оси блок 961 выбора компоненты α-оси умножает вектор (iαh, iβh) высокочастотного тока на матрицу (1, 0)T, таким образом выбирая только iαh, которая является компонентой в направлении α-оси вектора высокочастотного тока. Блок 962 вычисления амплитуды выполняет расчет с помощью выражения (34) для вычисления величины |iαh| iαh, и выводит величину |iαh|.
Как показано на фиг. 23, в блоке 193 извлечения компоненты β-оси, блок 963 выбора компоненты β-оси умножает вектор (iαh, iβh) высокочастотного тока на матрицу (0, 1)T, таким образом выбирая только iβh, которая является компонентой в направлении β-оси вектора высокочастотного тока. Блок 964 вычисления амплитуды выполняет расчет с помощью выражения (34) для вычисления величины |iβh| iβh, и выводит величину |iβh|.
[0119] Будет описан блок 194 вычисления детектированного вектора магнитного потока. На фиг. 24 блок 965 вычисления разности выполняет расчет с помощью выражения (36), используя |iαh|, выведенную из блока 192 извлечения компоненты α-оси, и |iβh|, выведенную из блока 193 извлечения компоненты β-оси, и таким образом выводя θdm. Блок 966 вычисления косинуса выполняет расчет косинуса, используя θdm, выведенную из блока 965 вычисления разности, и таким образом выводит cosθdm. Множительное устройство 968 умножает cosθdm, выведенный из блока 966 вычисления косинуса, на величину ϕf магнитного потока ротора, и таким образом выводит ϕαrD, которая является компонентой детектированного вектора магнитного потока в направлении α-оси. Блок 967 вычисления синуса выполняет расчет синуса, используя θdm, выведенную из блока 965 вычисления разности, и таким образом выводит sinθdm. Множительное устройство 969 умножает sinθdm, выведенный из блока 967 вычисления синуса, на величину ϕf магнитного потока ротора, и таким образом выводит ϕβrD, которая является компонентой детектированного вектора магнитного потока в направлении β-оси.
Приведенное выше является описанием конфигурации, назначения и работы блока 19 детектирования вектора магнитного потока.
[0120] Как описано выше, управляющее устройство для вращающейся машины переменного тока согласно варианту осуществления 3 вычисляет вектор отклонения магнитного потока, который является отклонением между детектированным вектором магнитного потока и оцененным вектором магнитного потока, и вектор отклонения тока, который является отклонением между детектированным вектором тока и оцененным вектором тока, и использует усиленный вектор отклонения, полученный с помощью усиления вектора отклонения магнитного потока, таким образом давая возможность возбуждать вращающуюся машину переменного тока только с помощью одного из оцененной скорости или оцененного положения, выведенных из блока адаптивного наблюдения, по диапазону от нулевой скорости до области высокой скорости. Поэтому необязательно побуждать и генератор фазы низкочастотной области, и генератор фазы высокочастотной области одновременно выполнять вычислительную обработку, следовательно количество вычислительной обработки может значительно сокращаться.
Кроме того, при расчете детектированного вектора (ϕdrD, ϕqrD) магнитного потока, выведенного из блока детектирования вектора магнитного потока, вектор высокочастотного тока, имеющий ту же самую частотную компоненту, как вектор высокочастотного напряжения, извлекается из детектированного вектора тока, θdm вычисляется из величины |iαh| iαh, которая является компонентой в направлении α-оси извлеченного вектора высокочастотного тока, и величины |iβh | iβh, которая является компонентой в направлении β-оси извлеченного вектора высокочастотного тока, и затем используются только θdm и величина ϕf вектора магнитного потока ротора. Поэтому, необязательно предварительно подготавливать угол ротора для вычисления детектированного вектора магнитного потока, и поэтому количество вычислений может сокращаться. Кроме того, так как отклик оценки угла ротора вообще не относится к расчету детектированного вектора магнитного потока, эффективность отклика, такого как отклик управления скоростью или отклик управления крутящим моментом, могут сохраняться на высоком уровне.
Дополнительно, так как детектированный вектор магнитного потока является вектором на осях α-β, блок адаптивного наблюдения может также конфигурироваться на осях α-β, так, чтобы каждый блок преобразования координат в блоке детектирования вектора тока и блоке адаптивного наблюдения мог изменяться от блока преобразования координат для выполнения преобразования к осям d-q, которое требует оцененное положение θ0, на блок преобразования координат для выполнения преобразование к осям α-β, что требует меньшего количества вычислений, таким образом обеспечивая эффект сокращения количества вычислений.
[0121] Замечено, что в пределах объема настоящего изобретения вышеупомянутые варианты осуществления могут свободно объединяться друг с другом, или каждый из вышеупомянутых вариантов осуществления может изменяться или сокращаться при необходимости.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0122] Настоящее изобретение делает возможным плавное возбуждение вращающейся машины переменного тока, не используя датчик положения по всей области скорости, и реализовывать сокращение количества вычислений и улучшение эффективности отклика, и может применяться к широкому разнообразию управляющих устройств для вращающейся машины переменного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2576246C1 |
| КОНТРОЛЛЕР ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2483423C1 |
| КОНТРОЛЛЕР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2431916C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНОЙ | 2009 |
|
RU2481694C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2009 |
|
RU2470453C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2664782C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2491692C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2481693C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ РОТОРНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2561708C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГЕНЕРИРОВАНИЕМ ЭНЕРГИИ И СПОСОБ УПРАВЛЕНИЯ ГЕНЕРИРОВАНИЕМ ЭНЕРГИИ ДЛЯ ТОПЛИВНОГО ЭЛЕМЕНТА | 2009 |
|
RU2482577C2 |











Изобретение относится к области электротехники и может быть испольтзовано для управления вращающейся электрической машиной, такой как индукционная (асинхронная или синхронная) машина. Техническим результатом является обеспечение плавного возбуждения в диапазоне от области низкой скорости до области высокой скорости. Управляющее устройство для вращающейся машины переменного тока содержит блок (3) детектирования вектора тока, блок (9) детектирования вектора магнитного потока, блок (8) адаптивного наблюдения, блок (4) управления, блок (5) приложения напряжения, блок (6) вычисления вектора отклонения для вывода вектора отклонения тока и вектора отклонения магнитного потока и блок (7) усиления отклонения. Блок (8) адаптивного наблюдения вычисляет оцененный вектор тока, оцененный вектор магнитного потока и оцененное положение, основываясь на векторе команды управления напряжением и усиленном векторе отклонения. Блок (4) управления накладывает вектор высокочастотного напряжения. Блок (9) детектирования вектора магнитного потока вычисляет детектированный вектор магнитного потока, основываясь на величине вектора высокочастотного тока, имеющего ту же самую частотную компоненту, что и вектор высокочастотного напряжения, который включен в детектированный вектор тока, и на величине магнитного потока ротора. 5 з.п. ф-лы, 25 ил.
1. Управляющее устройство (1) для вращающейся машины (2) переменного тока, содержащее:
блок (3) детектирования вектора тока для детектирования детектированного вектора тока из тока вращающейся машины (2) переменного тока;
блок (9) детектирования вектора магнитного потока для детектирования вектора магнитного потока ротора из детектированного вектора тока вращающейся машины (2) переменного тока и вывода вектора магнитного потока ротора в качестве детектированного вектора магнитного потока;
блок (8) адаптивного наблюдения для вывода оцененного вектора тока, оцененного вектора магнитного потока и оцененного положения вращающейся машины (2) переменного тока;
блок (4) управления для вывода вектора команды управления напряжением так, чтобы детектированный вектор тока совпадал с вектором команды управления током;
блок (5) приложения напряжения для приложения напряжения к вращающейся машине (2) переменного тока, основываясь на векторе команды управления напряжением;
блок (6) вычисления вектора отклонения для вывода вектора отклонения тока, который является отклонением между оцененным вектором тока и детектированным вектором тока, и вектора отклонения магнитного потока, который является отклонением между оцененным вектором магнитного потока и детектированным вектором магнитного потока; и
блок (7) усиления отклонения для усиления вектора отклонения тока и вектора отклонения магнитного потока и вывода усиленных векторов в качестве усиленного вектора отклонения, причем
блок (8) адаптивного наблюдения вычисляет и выводит оцененный вектор тока, оцененный вектор магнитного потока и оцененное положение, основываясь на векторе команды управления напряжением и усиленном векторе отклонения, и
дополнительно, блок (4) управления выводит вектор команды управления напряжением, на который наложен вектор высокочастотного напряжения, имеющий частотную компоненту, отличающуюся от частоты для возбуждения вращающейся машины (2) переменного тока, и блок (9) детектирования вектора магнитного потока вычисляет и выводит детектированный вектор магнитного потока, основываясь на величине вектора высокочастотного тока, имеющего ту же самую частотную компоненту, как вектор высокочастотного напряжения, который включен в детектированный вектор тока, и на величине магнитного потока ротора.
2. Управляющее устройство (1) для вращающейся машины (2) переменного тока по п. 1, в котором
блок (4) управления выводит вектор напряжения, на который наложен вектор высокочастотного переменного напряжения, и
блок (9) детектирования вектора магнитного потока вычисляет и выводит детектированный вектор магнитного потока, основываясь на векторе высокочастотного тока, по меньшей мере на одном из величины компоненты, параллельной вектору высокочастотного переменного напряжения, и величины компоненты, ортогональной вектору высокочастотного переменного напряжения, и на величине магнитного потока ротора.
3. Управляющее устройство (1) для вращающейся машины (2) переменного тока по п. 2, в котором
детектированный вектор магнитного потока, выводимый из блока (9) детектирования вектора магнитного потока, состоит из компоненты, параллельной вектору переменного напряжения, и компоненты, ортогональной вектору переменного напряжения.
4. Управляющее устройство (10) для вращающейся машины (2) переменного тока по п. 1, в котором
блок (14) управления выводит вектор напряжения, на который наложен вектор высокочастотного вращающегося напряжения, и
блок (19) детектирования вектора магнитного потока разлагает вектор высокочастотного тока в неподвижной ортогональной системе координат, состоящей из α-оси и β-оси, и вычисляет и выводит детектированный вектор магнитного потока, основываясь на величине компоненты направления α-оси и величине компоненты направления β-оси вектора высокочастотного тока и на величине магнитного потока ротора.
5. Управляющее устройство (10) для вращающейся машины (2) переменного тока по п. 4, в котором
детектированный вектор магнитного потока, выводимый из блока (19) детектирования вектора магнитного потока, состоит из компоненты направления α-оси и компоненты направления β-оси.
6. Управляющее устройство (1) для вращающейся машины (2) переменного тока по п. 1, в котором
блок (7) усиления отклонения сконфигурирован с возможностью изменения коэффициента усиления для усиления вектора отклонения тока и вектора отклонения магнитного потока в соответствии с оцененной скоростью вращающейся машины (2) переменного тока, рассчитанной с помощью блока (8) адаптивного наблюдения.
| СПОСОБ ЭФФЕКТИВНОЙ СИНХРОНИЗАЦИИ С ТРЕБУЕМЫМ ВРЕМЕННЫМ ИНТЕРВАЛОМ В СИСТЕМЕ СВЯЗИ МНОЖЕСТВЕННОГО ДОСТУПА С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ | 2009 |
|
RU2477568C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| JPH 1094298 A, 10.04.1998 | |||
| JP 2006158046 A, 15.06/2006 | |||
| US 20120001573 A1, 05.01.2012 | |||
| WO2010109528 A1, 30.09.2010. | |||

