ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству детектирования углового положения и воздушному кондиционеру и, в частности, относится к устройству управления электродвигателем, которое управляет электродвигателем, содержащим постоянный магнит.
УРОВЕНЬ ТЕХНИКИ
В Патентном документе 1 описывается инвертор, который приводит в действие синхронный электродвигатель с постоянным магнитом, при этом угловое положение электродвигателя определяется на основе действующего напряжения электродвигателя. В Патентном документе 1 детектируются фазные напряжения, и на основе этих фазных напряжений вычисляется линейное напряжение. Затем путем детектирования точки перехода через нуль этих линейных напряжений определяется угловое положение электродвигателя относительно положения, соответствующего точке перехода через нуль.
Кроме того, в качестве методов, относящихся к настоящему изобретению, приведены Патентные документы 2 и 3.
ДОКУМЕНТЫ УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
Патентный документ 1: Опубликованная заявка на патент Японии № 2010-233390
Патентный документ 2: Опубликованная заявка на патент Японии № 2011-19348
Патентный документ 3: Патент Японии № 2609840
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, РЕШАЕМЫЕ С ПОМОЩЬЮ ИЗОБРЕТЕНИЯ
С целью детектирования углового положения рассматривается применение линейного напряжения с использованием в качестве опорной минимальной фазы фазного напряжения вместо линейного напряжения. Затем - путем применения метода из Патентного документа 1 - угловое положение определяется на основе пересечений между линейными напряжениями с использованием минимальной фазы в качестве опорной и заданной величиной, определяемой заранее.
Однако линейное напряжение с использованием такой минимальной фазы в качестве опорной может создавать смещение из-за влияния напряжения постоянного тока (DC), которое вводится в инвертор, или плавающей емкости и т.п. В настоящей заявке, несмотря на то, что причины возникновения смещения не упомянуты, ниже подробно описывается один его пример.
Фиг. 25 представляет собой эквивалентную электрическую схему для описания причины возникновения смещения. На Фиг. 25 изображен конденсатор С между линией L1 DC и линией L2 DC. Конденсатор С заряжается напряжением DC, имеющим потенциал на стороне линии L1 DC в качестве высокого потенциала. Это напряжение DC вводится в инвертор 10 напряжения.
Далее рассмотрим случай, в котором все переключающие элементы инвертора 10 являются непроводящими. При этом эквивалентная схема инвертора 10 выражена в виде диодного моста, образованного диодами, которые, соответственно, встречно-параллельно соединены с переключающими элементами. На Фиг. 25 конфигурации двухфазных компонентов инвертора 10 эквивалентно изображены парой диодов Du11 и Du12 и парой диодов Dv11 и Dv12.
Электродвигатель 20, предусмотренный на выходной стороне инвертора 10, подключен к выходной стороне Pu1 между парой диодов Du11 и Du12 и к выходной стороне Pv1 между парой диодов Dv11 и Dv12 и изображен в виде эквивалентного источника питания DC. В этом случае, поскольку рассматривается состояние, в котором в электродвигателе 20 возникло индуцированное напряжение, индуцированное напряжение воспринимается как эквивалентный источник питания DC.
Индуцированное напряжение определяется детектором 30 напряжения. Детектор 30 напряжения эквивалентно изображен в виде пары резисторов 301 и 302. Резисторы 301 и 302, например, соединены последовательно между выходной стороной Pu1 и линией L2 DC. Детектор 30 напряжения выдает, например, напряжение обеих сторон резистора 302 в качестве детектируемых значений.
При этом, несмотря на то, что все переключающие элементы инвертора 10 являются непроводящими, в действительности в этих переключающих элементах (или диодах, которые встречно параллельно соединены с переключающими элементами) протекает незначительный ток i1 (см. символ стрелки в пунктирной линии на Фиг. 25). Этот ток i1 также протекает в детекторе 30 напряжения.
С другой стороны, на стороне электродвигателя 20 в тех случаях, когда возникает индуцированное напряжение, ток i2 протекает от выходной стороны Pu1 к линии L2 DC через детектор 30 напряжения (см. символ стрелки в штрихпунктирной линии на Фиг. 25).
В связи с этим, напряжение, детектируемое детектором 30 напряжения, включает в себя не только падение напряжения, создаваемое в резисторе 302 током i2, но и падение напряжения, создаваемое в резисторе 302 током i1. Падение напряжения, создаваемое током i1, соответствует смещению. Такое смещение варьируется в соответствии с изменением напряжения DC, поступающего на инвертор 10.
На Фиг. 25, несмотря на то, что приведено описание двух фаз, оно также аналогично трем фазам. То есть в индуцированном напряжении с использованием минимальной фазы в качестве опорной возникает смещение.
В противовес возникновению смещения в детектируемых значениях, как описано выше, заданная величина, образующая пересечения с детектируемыми значениями, представляет собой величину, детектируемую заранее, при этом смещение не возникает. Следовательно, эти пересечения отклоняются в соответствии со смещением, создаваемым в детектируемом значении. Поэтому точность детектирования углового положения становится низкой.
Таким образом, в настоящем изобретении предлагается устройство для углового положения, которое может детектировать угловое положение с высокой точностью даже в тех случаях, когда смещение возникло при детектировании линейного напряжения с использованием минимальной фазы в качестве опорной.
СРЕДСТВА РЕШЕНИЯ ПРОБЛЕМ
Первый аспект устройства для детектирования углового положения электродвигателя (2) в соответствии с настоящим изобретением, причем электродвигатель имеет индуктор (22), содержащий постоянный магнит, и якорь (21), содержащий катушки (21u, 21v, 21w) индуктивности трех или более фаз, причем указанный индуктор и указанный якорь вращаются относительно друг друга, включающего в себя: детектор (431), который определяет, равны ли первое линейное индуцированное напряжение (Vun) и второе линейное индуцированное напряжение (Vvn) друг другу, причем первое линейное индуцированное напряжение (Vun) представляет собой разность потенциалов первого фазового потенциала из фазовых потенциалов, которые выдает якорь в результате индуцированной электродвижущей силы, относительно опорного потенциала, а второе линейное индуцированное напряжение (Vvn) представляет собой разность потенциалов второго фазового потенциала из фазовых потенциалов, отличных от первого фазового потенциала, относительно опорного потенциала, причем опорный потенциал представляет собой любую из минимальной фазы и максимальной фазы; и блок (432) установки углового положения, который устанавливает расчетную величину углового положения электродвигателя равной заданному значению в момент времени, когда первое линейное индуцированное напряжение и второе линейное индуцированное напряжение равны друг другу.
Второй аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с первым аспектом. Множество линий (Pu, Pv, Pw) АС соединено с катушками (21u, 21v, 21w) индуктивности соответственно, линии АС соединены с инвертором (2) типа напряжения, а инвертор типа напряжения соединен с первой и второй линиями (L1, L2) DC на входной стороне. Устройство для детектирования углового положения дополнительно содержит детектор (3) напряжения, в котором имеются соединение первой линии (L1, L2) DC и первой (Pu) из линий АС, к которым прикладывается первый фазовый потенциал (Vu), и вторую цепь (32), соединяющую первую линию (L1, L2) DC и вторую (Pv) из линий АС, к которым прикладывается второй фазовый потенциал (Vv), и который детектирует в качестве первого линейного индуцированного напряжения (Vun) первое напряжение (Vun1, Vun2), первое напряжение (Vun1, Vun2) между первой линией DC и первой из линий АС в первой цепи и в качестве второго линейного индуцированного напряжения (Vvn) второе напряжение (Vvn1, Vvn2) между первой линией DC и второй из линий АС во второй цепи.
Третий аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии со вторым аспектом. Детектор (3) напряжения дополнительно содержит резисторы (R11, R12, R21, R22) деления напряжения, последовательно соединенные друг с другом в каждой из первой цепи (31) и второй цепи (32), при этом напряжения резисторов деления напряжения в первой цепи и второй цепи, соответственно, используются в качестве первого напряжения (Vun1) и второго напряжения (Vvn1).
Четвертый аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии со вторым или третьим аспектом. Детектор (3) напряжения дополнительно содержит блок (33, ZD11, ZD21) ограничения детектируемого напряжения, который ограничивает первое напряжение (Vun1, Vun2) заданной величиной, когда первое линейное индуцированное напряжение (Vun) больше или равно опорной величине (Vref), и ограничивает второе напряжение (Vvn1, Vvn2) заданной величиной, когда второе линейное индуцированное напряжение (Vvn) больше или равно опорной величине (Vref).
Пятый аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с одним из аспектов с первого по четвертый. Устройство для детектирования углового положения дополнительно содержит блок (5) задания направления вращения, который задает направление вращения электродвигателя в виде заданного направления на основе величины первого линейного индуцированного напряжения или второго линейного индуцированного напряжения в момент времени, когда первое линейное индуцированное напряжение (Vun) и второе линейное индуцированное напряжение (Vvn) равны друг другу.
Шестой аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с пятым аспектом. Детектор (431) многократно определяет, равны ли первое линейное индуцированное напряжение (Vun) и второе линейное индуцированное напряжение (Vvn) друг другу. Блок (5) задания направления вращения задает направление вращения в виде заданного направления на основе количественного соотношения между первой величиной (VunL, VvnL) и второй величиной (VunK, VvnK). Первая величина представляет собой значение одного из первого линейного индуцированного напряжения и второго линейного индуцированного напряжения в момент времени, когда первое линейное индуцированное напряжение и второе линейное индуцированное напряжение равны друг другу. Вторая величина представляет собой значение одного из первого линейного индуцированного напряжения и второго линейного индуцированного напряжения в момент времени, когда первое линейное индуцированное напряжение и второе линейное индуцированное напряжение равны друг другу в последний раз.
Седьмой аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с шестым аспектом. Результат вычисления, получаемый путем сложения или умножения первого линейного индуцированного напряжения и второго линейного индуцированного напряжения в момент времени, когда первое линейное индуцированное напряжение (Vun) и второе линейное индуцированное напряжение (Vvn) равны друг другу, используется в качестве первого значения, результат вычисления в момент времени, когда первое линейное индуцированное напряжение и второе линейное индуцированное напряжение равны друг другу в последний раз, используется в качестве второго значения.
Восьмой аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с четвертым аспектом. Детектор (431) многократно определяет изменение количественного соотношения между первым напряжением (Vun1, Vun2) и вторым напряжением (Vvn1, Vvn2) для многократного определения, равны ли первое линейное индуцированное напряжение и второе линейное индуцированное напряжение друг другу. Устройство для детектирования углового положения дополнительно содержит блок (5) задания направления вращения, который задает направление вращения электродвигателя (2) в виде заданного направления в тех случаях, когда событие, при котором первое напряжение становится выше второго напряжения, а количественное соотношение изменяется, происходит, по меньшей мере, два раза подряд, и который задает направление вращения электродвигателя (2) в виде направления, противоположного заданному направлению, в тех случаях, когда событие, при котором первое напряжение становится ниже второго напряжения, а количественное соотношение изменяется, происходит, по меньшей мере, два раза подряд.
Девятый аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с четвертым аспектом. Детектор (431) определяет, становится ли первое напряжение (Vun1, Vun2) выше второго напряжения (Vvn1, Vvn2) и становится ли первое напряжение ниже второго напряжения. Устройство для детектирования углового положения дополнительно содержит блок (5) задания направления вращения, который задает направление вращения электродвигателя (2) в виде заданного направления в тех случаях, когда, по меньшей мере, одно из первого напряжения (Vun1, Vun2) и второго напряжения (Vvn1, Vvn2) меньше порогового значения, меньшего или равного заданной величине, а первое напряжение становится выше второго напряжения, и который задает направление вращения в виде направления, противоположного заданному направлению, в тех случаях, когда, по меньшей мере, одно из первого напряжения и второго напряжения меньше порогового значения, меньшего или равного заданной величине, а первое напряжение становится ниже второго напряжения.
Десятый аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с любым из аспектов со второго по пятый. Устройство для детектирования углового положения дополнительно содержит блок (5) задания направления вращения, который задает направление вращения электродвигателя (2). Блок задания направления вращения вычисляет коэффициент подобия между расчетным сигналом (Vun_N), идентичным первому линейному индуцированному напряжению (Vun), в тех случаях, когда направление вращения является заданным направлением, и первым линейным индуцированным напряжением, которое детектируется, и задает направление вращения на основе коэффициента подобия.
Одиннадцатый аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с любым из аспектов со второго по пятый. Устройство для детектирования углового положения дополнительно содержит блок (5) задания направления вращения, который задает направление вращения электродвигателя (2). Блок задания направления вращения вычисляет коэффициент подобия между расчетным сигналом (Vun_N), идентичным сигналу, получаемому путем выполнения вычисления одного из сложения и умножения первого линейного индуцированного напряжения (Vun) и второго линейного индуцированного напряжения (Vvn) в тех случаях, когда направление вращения является заданным направлением, и сигналом, получаемым путем выполнения вычисления первого линейного индуцированного напряжения и второго линейного индуцированного напряжения, которые детектируются, и задает направление вращения на основе коэффициента подобия.
Двенадцатый аспект устройства для детектирования углового положения электродвигателя в соответствии с настоящим изобретением представляет собой устройство для детектирования углового положения в соответствии с любым из вариантов осуществления с пятого по одиннадцатый. Детектор (431) многократно определяет, равны ли первое линейное индуцированное напряжение (Vun) и второе линейное индуцированное напряжение (Vvn) друг другу. Устройство для детектирования углового положения дополнительно содержит вычислитель (6), который вычисляет скорость вращения электродвигателя (2) на основе множества моментов времени, когда первое линейное индуцированное напряжение и второе линейное индуцированное напряжение равны друг другу. Блок (4) установки углового положения на основе расчетного значения углового положения, которое устанавливается в момент времени, когда первое линейное индуцированное напряжение и второе линейное индуцированное напряжение равны друг другу, направления вращения, которое задается блоком (5) задания направления вращения, скорости вращения, вычисляемой вычислителем скорости вращения, и времени от момента, когда вычисляется расчетное значение углового положения, до другого момента времени, вычисляет угловое положение в другой момент времени.
Первый аспект воздушного кондиционера в соответствии с настоящим изобретением включает в себя устройство для детектирования углового положения в соответствии с любым из аспектов с первого по двенадцатый, электродвигатель (2) и вентилятор, который приводится в действие электродвигателем.
ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом устройства (4) для детектирования углового положения, относящегося к настоящему изобретению, ввиду того, что угловое положение определяется, когда первое линейное индуцированное напряжение и второе линейное индуцированное напряжение равны друг другу, даже если смещение возникло и в первом линейном индуцированном напряжении, и во втором линейном индуцированном напряжении, момент времени изменения остается тем же. В связи с этим, точность оценки углового положения может быть повышена.
В соответствии со вторым аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, по сравнению со случаем детектирования индуцированного напряжения линии АС, извлечения индуцированного напряжения минимальной фазы из детектированного индуцированного напряжения и вычисления линейного индуцированного напряжения путем вычитания индуцированного напряжения минимальной фазы из индуцированного напряжения, первое линейное индуцированное напряжение и второе линейное индуцированное напряжение всегда могут быть получены (то есть без вычислений).
В соответствии с третьим аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, могут детектироваться первое напряжение и второе напряжение, меньшие, чем первое линейное индуцированное напряжение и второе линейное индуцированное напряжение. Следовательно, предельное давление блока оценки углового положения может быть снижено.
В соответствии с четвертым аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, ввиду того, что первое напряжение и второе напряжение, которые используются в детекторе и в блоке оценки углового положения, ограничены заданной величиной, приложение большого напряжения (избыточного напряжения) в детекторе и в блоке оценки углового положения может быть предотвращено.
В соответствии с пятым аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, по сравнению со случаем детектирования направления вращения с помощью датчика детектирования углового положения и т.п., поскольку датчик детектирования углового положения является дорогостоящим, стоимость изготовления может быть снижена.
В соответствии с шестым аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, виду того, что одно из первых линейных индуцированных напряжений и одно из вторых линейных индуцированных напряжений сравниваются друг с другом, направление вращения может быть определено надлежащим образом, когда максимальное значение линейных индуцированных напряжений Vun и Vvn становится ниже порогового значения.
В соответствии с седьмым аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, виду того, что может быть получена более значительная разность между результатами вычисления, чем разность между первыми линейными индуцированными напряжениями и разность между вторыми линейными индуцированными напряжениями, возникает незначительная ошибка в сравнении между первой величиной и второй величиной.
В соответствии с восьмым аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, во время периода, в котором первое линейное индуцированное напряжение и второе линейное индуцированное напряжение соответствующим образом превышают опорную величину, первое напряжение и второе напряжение используют заданное значение. В таком случае, если первое напряжение может постоянно превышать второе напряжение или становиться ниже его, по меньшей мере, вдвое, направление вращения может быть надлежащим образом задано даже в этом случае.
В соответствии с девятым аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, во время периода, в котором первое линейное индуцированное напряжение и второе линейное индуцированное напряжение соответствующим образом превышают опорную величину, первое напряжение и второе напряжение используют заданное значение. Даже в этом случае направление вращения может быть надлежащим образом задано.
В соответствии с десятым и одиннадцатым аспектами устройства для детектирования углового положения, относящегося к настоящему изобретению, направление вращения может быть задано.
В соответствии с двенадцатым аспектом устройства для детектирования углового положения, относящегося к настоящему изобретению, ввиду того, что вычисляется расчетное значение углового положения в другой момент времени, это может использоваться для управления пуском электродвигателя.
В соответствии с первым аспектом воздушного кондиционера, относящегося к настоящему изобретению, вентилятор, предусмотренный в наружном блоке, расположенном снаружи, вращается за счет потока воздуха (ветра) даже в том случае, если к электродвигателю не прикладывается напряжение АС. При этом ввиду того, что в линии АС появляется только индуцированное напряжение, линейное индуцированное напряжение легко может быть получено.
Цель, характеристики, этапы и преимущества настоящего изобретения станут более понятными благодаря нижеследующему подробному описанию и прилагаемым чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ. 1 - схема, на которой изображен пример принципиальной конструкции устройства управления электродвигателем;
Фиг. 2 - схема, на которой изображен схематический пример индуцированного напряжения в направлении вращения вперед;
Фиг. 3 - схема, на которой изображен схематический пример линейного индуцированного напряжения в направлении вращения вперед;
Фиг. 4 - схема, на которой изображен схематический пример линейного индуцированного напряжения в направлении обратного вращения;
Фиг. 5 - схема, на которой изображен схематический пример линейного индуцированного напряжения в направлении вращения вперед;
Фиг. 6 - схема, на которой изображен схематический пример линейного индуцированного напряжения в направлении обратного вращения;
Фиг. 7 - структурная схема, на которой изображен пример операции детектора углового положения;
Фиг. 8 - структурная схема, на которой изображен пример операции детектора углового положения;
Фиг. 9 - схема, на которой изображен пример принципиальной конструкции устройства управления электродвигателем;
Фиг. 10 - схема, на которой изображен схематический пример детектированного напряжения в направлении вращения вперед;
Фиг. 11 - схема, на которой изображен схематический пример детектированного напряжения в направлении обратного вращения;
Фиг. 12 - схема, на которой изображен пример принципиальной конструкции устройства управления электродвигателем;
Фиг. 13 - структурная схема, на которой изображен пример операции детектора углового положения;
Фиг. 14 - схема, на которой изображен пример принципиальной конструкции детектора углового положения и блока определения направления вращения;
Фиг. 15 - схема, на которой изображен схематический пример результата вычислений линейного индуцированного напряжения;
Фиг. 16 - схема, на которой изображен схематический пример результата вычислений линейного индуцированного напряжения;
Фиг. 17 - структурная схема, на которой изображен пример операции детектора углового положения и блока определения направления вращения;
Фиг. 18 - структурная схема, на которой изображен пример операции блока определения направления вращения;
Фиг. 19 - структурная схема, на которой изображен пример операции детектора углового положения и блока определения направления вращения;
Фиг. 20 - структурная схема, на которой изображен пример операции блока определения направления вращения;
Фиг. 21 - схема, на которой изображен схематический пример расчетного сигнала;
Фиг. 22 - схема, на которой изображен пример принципиальной конструкции детектора углового положения, блока определения направления вращения и вычислителя скорости вращения;
Фиг. 23 - структурная схема, на которой изображен пример операции детектора углового положения, блока определения направления вращения и вычислителя скорости вращения;
Фиг. 24 - структурная схема, на которой изображен пример операции детектора углового положения, блока определения направления вращения и вычислителя скорости вращения;
Фиг. 25 - схема для описания причины возникновения смещения в линейном индуцированном напряжении;
Фиг. 26 - схема, на которой изображен схематический пример линейного индуцированного напряжения в направлении вращения вперед.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Первый вариант осуществления
Как показано на Фиг. 1, рассматриваемое устройство управления электродвигателем содержит преобразователь 1 питания, электродвигатель 2 и детектор 4 углового положения.
Преобразователь 1 питания соединен с линиями L1 и L2 DC на их входной стороне и соединен с линиями Pu, Pv и Pw АС на их выходной стороне. Между линиями L1 и L2 DC подается напряжение DC. Это напряжение DC подается, например, с помощью не показанного на чертеже преобразователя. Указанный преобразователь преобразует напряжение АС, например, от промышленной системы электроснабжения АС, в напряжение DC и подает его между линиями L1 и L2 DC. В качестве такого преобразователя может использоваться, например, диодная схема выпрямления, образуемая диодным мостом. В качестве напряжения промышленной системы электроснабжения АС может использоваться, например, любое из 100 В, 200 В, 220 В и 400 В. В том случае, когда промышленная система электроснабжения АС выдает однофазное напряжение АС, напряжение DC составляет √2 напряжения промышленной системы электроснабжения АС и становится равным 141 В, 283 В, 311 В и 566 В соответственно. В приведенном на Фиг. 1 иллюстративном примере между линиями L1 и L2 DC предусмотрен конденсатор С, сглаживающий напряжение DC. Преобразователь 1 питания преобразует напряжение DC в напряжение АС и подает его на линии Pu, Pv и Pw АС.
С линиями Pu, Pv и Pw АС соединен электродвигатель 2, при этом электродвигатель 2 содержит якорь 21 и индуктор 22. Якорь 21 содержит якорные катушки 21u, 21v, 21w индуктивности в трех фазах, при этом якорные катушки 21u, 21v, 21w индуктивности соединены с линиями Pu, Pv и Pw АС. На якорные катушки 21u, 21v, 21w индуктивности подаются трехфазные напряжения АС от преобразователя 1 питания. Следовательно, постоянный ток протекает к якорным катушкам 21u, 21v, 21w индуктивности, при этом магнитное поле вращения подается на индуктор 22. Индуктор 22 содержит постоянный магнит и подает магнитный поток индуктора на якорь 21. При этом индуктор 22 принимает магнитное поле вращения от якоря 21 и вращается относительно якоря 21.
В приведенном на Фиг. 1 иллюстративном примере ввиду того, что предполагается электродвигатель 2, содержащий якорные катушки 21u, 21v, 21w индуктивности в трех фазах, хотя преобразователь 1 питания выдает трехфазные напряжения АС, это не обязательно имеет ограничение. Путем использования электродвигателя 2 с числом фаз N, большим трех, преобразователь 1 питания на N фаз может использоваться аналогичным образом. В приведенном на Фиг. 1 иллюстративном примере, несмотря на то, что якорные катушки 21u, 21v, 21w индуктивности соединены друг с другом с помощью так называемого соединения по схеме звезды, якорные катушки 21u, 21v, 21w индуктивности могут быть соединены друг с другом с помощью так называемого соединения по схеме треугольника.
В таком механизме привода электродвигателя в том случае, когда электродвигатель 2 вращается, магнитный поток, проходящий через якорные катушки 21u, 21v, 21w индуктивности, в результате вращения изменяется. Вместе с тем, в якорных катушках 21u, 21v, 21w индуктивности в результате вращения, соответственно, возникает индуцированная электродвижущая сила, при этом электродвигатель 2 выдает фазные потенциалы (также именуемые в дальнейшем индуцированными напряжениями) Vu, Vv и Vw в линии Pu, Pv и Pw АС (см. также Фиг. 2) соответственно.
Такой электродвигатель 2 применяется, например, в воздуходувке, такой как вентилятор или нагнетатель воздуха. Например, электродвигатель 2 может приводить в действие вентилятор или компрессор, установленный в тепловом насосе (воздушном кондиционере, водонагревателе и т.п.). Например, в случае приведения в действие вентилятора, установленного в наружном блоке, расположенном снаружи, даже если преобразователь 1 питания не находится в состоянии выдачи напряжения АС в электродвигатель 2, вентилятор вращается за счет потока наружного воздуха (ветра). Следовательно, в момент запуска такого электродвигателя 2 необходимо детектировать относительное угловое положение между якорем 21 и индуктором 22 (именуемое в дальнейшем угловым положением электродвигателя 2). Конечно, поскольку компрессор или вентилятор вращается по инерции даже в том случае, когда он не вращается за счет внешней силы, в этом случае также необходимо детектировать угловое положение при его вращении.
Детектор 4 углового положения определяет угловое положение электродвигателя 2 на основе линейных индуцированных напряжений Vun и Vvn, описываемых ниже. В качестве опорного потенциала линейных индуцированных напряжений Vun и Vvn используется индуцированное напряжение минимальной фазы из индуцированных напряжений Vu, Vv и Vw. То есть линейное индуцированное напряжение Vun представляет собой разность потенциалов относительно опорного потенциала индуцированного напряжения Vu, а линейное индуцированное напряжение Vvn представляет собой разность потенциалов относительно опорного потенциала индуцированного напряжения Vv. Подробности описываются ниже.
Индуцированные напряжения Vu, Vv и Vw принимают приблизительно форму синусоидального колебания, которое изменяется в зависимости от углового положения (электрического угла) электродвигателя 2, пример которого приведен на Фиг. 2.
Далее на Фиг. 2 в качестве примера приведены индуцированные напряжения Vu, Vv и Vw при вращении электродвигателя 2 в направлении вращения вперед. В направлении вращения вперед индуцированные напряжения Vv и Vw предшествуют на 120 градусов индуцированным напряжениям Vu и Vv соответственно. То есть такое направление вращения задается как направление вращения вперед.
В направлении вращения вперед (Фиг.2) индуцированное напряжение Vu принимает минимальное значение, когда угловое положение находится, например, в диапазоне от 30 градусов до 150 градусов, следовательно, в этом диапазоне индуцированное напряжение минимальной фазы становится индуцированным напряжением Vu. Следовательно, в этом диапазоне линейное индуцированное напряжение Vun является нулевым, как показано в качестве примера на Фиг. 3. Кроме того, когда угловое положение находится в диапазоне от 150 градусов до 270 градусов, индуцированное напряжение Vv является индуцированным напряжением минимальной фазы, и, следовательно, в этом диапазоне линейное индуцированное напряжение Vun представляет собой разность потенциалов между индуцированным напряжением Vu и индуцированным напряжением Vv минимальной фазы и принимает форму, пример которой приведен на Фиг. 3. В другом диапазоне происходит то же самое. Кроме того, линейное индуцированное напряжение Vun представляет собой разность потенциалов между индуцированным напряжением Vv и индуцированным напряжением минимальной фазы и принимает форму, пример которой приведен на Фиг. 3.
В тех случаях, когда направление вращения представляет собой направление обратного вращения, индуцированные напряжения Vv и Vw задержаны на 120 градусов относительно индуцированных напряжений Vu и Vv соответственно. Следовательно, линейные индуцированные напряжения Vun и Vvn при этом принимают форму, пример которой приведен на Фиг. 4.
В соответствии с Фиг. 3 и 4, угловое положение в момент времени, когда линейные индуцированные напряжения Vun и Vvn равны друг другу, составляет 150 градусов или 330 градусов независимо от направления вращения. Кроме того, угловое положение в момент времени, когда линейное индуцированное напряжение Vun становится выше, чем линейное индуцированное напряжение Vvn, составляет 150 градусов независимо от направления вращения, а угловое положение в момент времени, когда линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn, составляет 330 градусов независимо от направления вращения. Следовательно, когда линейные индуцированные напряжения Vun и Vvn равны друг другу, может быть определено угловое положение.
Детектор 4 углового положения содержит детектор 431 и блок 432 установки. При этом детектор 4 углового положения выполнен с возможностью включения в свой состав микрокомпьютера и запоминающего устройства. Микрокомпьютер выполняет каждый этап обработки (то есть процедуру), описанный в программе. Запоминающее устройство может быть выполнено в виде одного или множества из различных запоминающих устройств, таких как постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), перезаписываемая энергонезависимая память (EPROM (стираемое программируемое ПЗУ)) и накопитель на жестком диске. Запоминающее устройство хранит различного рода информацию и данные, хранит программы, которые исполняет микрокомпьютер, и обеспечивает рабочую область для выполнения программы. Предполагается, что микрокомпьютер может использоваться в качестве различных средств, соответствующих каждому этапу обработки, описанному в программе, либо может реализовывать различные функции, соответствующие каждому этапу обработки. Кроме того, детектор 4 углового положения может реализовывать, помимо этого, частично или полностью различные процедуры, которые исполняются, либо различные средства или различные функции, которые реализуются детектором 4 углового положения, с помощью аппаратных средств. Кроме того, этот контент также применим к блоку 5 задания направления вращения и вычислителю 6 скорости вращения, описываемых в других вариантах осуществления.
Детектор 431 вводит линейные индуцированные напряжения Vun и Vvn и определяет, равны ли линейные индуцированные напряжения Vun и Vvn друг другу. Например, это может быть определено посредством использования известного блока сравнения, который сравнивает большие/малые величины линейных индуцированных напряжений Vun и Vvn. В частности, при изменении количественного соотношения между линейными индуцированными напряжениями Vun и Vvn можно установить, что линейные индуцированные напряжения Vun и Vvn равны друг другу.
Блок 432 установки устанавливает расчетное значение углового положения электродвигателя 2 в момент времени, когда линейные индуцированные напряжения Vun и Vvn равны друг другу, равным заданной величине (например, 150 градусов или 330 градусов). То есть если линейное индуцированное напряжение Vun превышает линейное индуцированное напряжение Vvn, блок 432 установки устанавливает расчетное значение углового положения равным заданной величине (в данном случае 150 градусов) в качестве углового положения в момент времени, когда линейное индуцированное напряжение Vun превышает линейное индуцированное напряжение Vun. Кроме того, если линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn, блок 432 установки устанавливает расчетное значение углового положения равным заданной величине (в данном случае 330 градусов) в качестве углового положения в момент времени, когда линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn. Определение углового положения может выполняться лишь в тех случаях, когда линейное индуцированное напряжение Vun превышает линейное индуцированное напряжение Vvn, либо в тех случаях, когда линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn. Конечно, угловое положение может определяться в обоих случаях. Если угловое положение определяется в обоих случаях, угловое положение может определяться более детально.
Как указано выше, в соответствии с рассматриваемым детектором 4 углового положения, угловое положение может определяться независимо от направления вращения электродвигателя 2. Кроме того, равенство между линейными индуцированными напряжениями Vun и Vvn устанавливается в качестве запускающего события для определения углового положения. В связи с этим, даже в тех случаях, когда смещение возникает одновременно в линейных индуцированных напряжениях Vun и Vvn, момент времени, когда количественное соотношение изменяется, остается тем же. Такое смещение является смещением детектора (описываемым ниже), который детектирует, например, линейные индуцированные напряжения Vun и Vvn. Следовательно, снижение точности определения углового положения из-за смещения может быть предотвращено. То есть точность определения углового положения может быть повышена.
Кроме того, в соответствии со способом определения углового положения, вместо индуцированных напряжений Vu, Vv и Vw используются линейные индуцированные напряжения Vun и Vvn. В случае использования индуцированных напряжений Vu, Vv и Vw их опорный потенциал становится потенциалом нейтральной точки электродвигателя 2. Следовательно, с целью детектирования индуцированных напряжений Vu, Vv и Vw необходимо использовать электродвигатель 2, который может выдавать потенциал нейтральной точки, либо фактически создавать потенциал нейтральной точки электродвигателя 2. В первом случае существует ограничение на применимый электродвигатель 2, а во втором случае конфигурация схемы становится сложной. С другой стороны, в соответствии с рассматриваемым способом определения углового положения, ввиду того, что используются линейные индуцированные напряжения Vun и Vvn, способ может также применяться к электродвигателю 2, который не может выдавать потенциал нейтральной точки, при этом конструкция схемы становится простой.
Кроме того, как и в Патентном документе 1, в случае вычисления пересечений между линейным напряжением и заданной величиной, определяемой заранее, возникают также нижеследующие проблемы. То есть если скорость вращения электродвигателя 2 мала, максимальное значение линейного напряжения также становится небольшим. Если максимальное значение линейных напряжений становится меньше заданной величины, ввиду того, что отсутствует пересечение между линейными напряжениями и заданной величиной, пересечение не может быть вычислено. С другой стороны, в рассматриваемом варианте осуществления ввиду того, что определяется изменение (пересечение) количественного соотношения между линейными индуцированными напряжениями Vun и Vvn, такой ситуации можно избежать.
В приведенном выше примере в качестве двух линейных индуцированных напряжений используются линейные индуцированные напряжения Vun и Vvn. Однако, помимо этого из числа линейных индуцированных напряжений Vun, Vvn и Vwn могут использоваться два произвольных. Линейное индуцированное напряжение Vwn представляет собой разность потенциалов индуцированного напряжения Vw относительно индуцированного напряжения минимальной фазы.
В Таблице 1 приведено соотношение между линейными индуцированными напряжениями Vun и Vvn и угловым положением, а также соотношение между линейными индуцированными напряжениями Vvn и Vwn и угловым положением.
Хотя в приведенном выше примере используются два линейных индуцированных напряжения, могут также использоваться три линейных индуцированных напряжения. При использовании трех линейных индуцированных напряжений ввиду того, что число этих пересечений во время одного цикла индуцированных напряжений увеличивается, угловые положения могут определяться более детально.
В приведенном выше примере в качестве линейного индуцированного напряжения применялось индуцированное напряжение с использованием индуцированного напряжения минимальной фазы в качестве опорной. Однако может применяться индуцированное напряжение с использованием индуцированного напряжения максимальной фазы в качестве опорной. На Фиг. 5 и 6 изображены линейные индуцированные напряжения Vup и Vvp с использованием индуцированного напряжения максимальной фазы в качестве опорной. Однако на Фиг. 5 изображены линейные индуцированные напряжения Vup и Vvp в направлении вращения вперед, а на Фиг. 6 изображены линейные индуцированные напряжения Vup и Vvp в направлении обратного вращения. Как можно понять из Фиг. 5 и 6, детектор 4 углового положения задает расчетное значение углового положения равным 150 градусов, если линейное индуцированное напряжение Vup превышает линейное индуцированное напряжение Vvp, и задает расчетное значение углового положения равным 330 градусов, если линейное индуцированное напряжение Vup становится ниже, чем линейное индуцированное напряжение Vvp.
В приведенных на Фиг. 5 и 6 иллюстративных примерах, несмотря на то, что линейные индуцированные напряжения Vup и Vvp демонстрируют отрицательные значения, с целью упрощения вычислений могут использоваться абсолютные величины этих значений.
Далее описываются примеры с использованием линейных индуцированных напряжений Vun и Vvn. Однако тот факт, что может применяться любое из линейных индуцированных напряжений двух или более фаз, и тот факт, что может применяться линейное индуцированное напряжение с использованием максимальной фазы в качестве опорной, могут быть применены к любому из нижеследующих аспектов (включая другие варианты осуществления).
<Детектирование линейного индуцированного напряжения>
В приведенном на Фиг. 1 иллюстративном примере преобразователь 1 питания представляет собой инвертор напряжения. В частности, преобразователь 1 питания содержит переключающие элементы Sup, Svp, Swp, Sun, Svn и Swn, а также диоды Dup, Dvp, Dwp, Dun, Dvn и Dwn. переключающие элементы Sxp и Sxn (x соответствует u, v и w, в дальнейшем являющимся одинаковыми) представляют собой, например, биполярные транзисторы с изолированным затвором и последовательно соединены друг с другом между линиями L1 и L2 DC. Диоды Dxp и Dxn параллельно соединены с переключающими элементами Sxp и Sxn соответственно и имеют аноды на стороне линии L2 DC. Линии Px АС, соответственно, соединены с точкой между переключающими элементами Sxp и Sxn.
В тех случаях, когда переключающие элементы Sxp и Sxn могут являться проводящими в обратном направлении (проводимость от линии L2 DC в направлении линии L1 DC), диоды Dxp и Dxn не являются обязательным условием. Например, при использовании полевого транзистора со структурой «металл-оксид-полупроводник» в качестве переключающих элементов Sxp и Sxn диоды Dxp и Dxn не нужны.
Эти переключающие элементы Sxp и Sxn управляются таким образом, чтобы они имели взаимоисключающую проводимость. Это вызвано тем, что когда оба переключающих элемента Sxp и Sxn становятся проводящими, линии L1 и L2 DC замыкаются накоротко через переключающие элементы Sxp и Sxn, и, следовательно, в переключающие элементы Sxp и Sxn протекает большой ток. При этом, если указанные переключающие элементы Sxp и Sxn управляются надлежащим образом, преобразователь 1 питания может преобразовывать напряжение DC в напряжение АС.
В приведенном на Фиг. 1 иллюстративном примере предусмотрен детектор 3 напряжения, который детектирует линейное индуцированное напряжение. В детекторе 3 напряжения имеются цепи 31 и 32, которые соединяют друг с другом каждую из линий Pu и Pv АС, на которые подаются индуцированные напряжения Vu и Vv соответственно, и линию L2 DC. Детектор 3 напряжения детектирует напряжения между каждой из линий Pu и Pv АС и линией L2 DC в качестве линейных индуцированных напряжений Vun и Vvn в цепях 31 и 32. Фактически в детектированное значение детектора 3 напряжения входит смещение, основанное на напряжении DC, описываемом применительно к Фиг. 25. Однако при этом для упрощения сначала приводится описание без учета смещения. Смещение будет описываться ниже как разновидность шума.
В состоянии, когда преобразователь 1 питания, будучи управляемым, выдает напряжение АС в линии Pu, Pv и Pw АС, детектор 3 напряжения не может надлежащим образом детектировать линейные индуцированные напряжения Vun и Vvn. Следовательно, детектор 3 напряжения детектирует линейное индуцированное напряжение в том состоянии, когда преобразователь 1 питания не выдает напряжение АС. То есть детектор 3 напряжения детектирует линейное индуцированное напряжение в управляемом состоянии таким образом, что все переключающие элементы Sxp и Sxn становятся непроводящими.
Причиной вращения электродвигателя 2 в состоянии, когда преобразователь 1 питания не выдает напряжение АС, является, например, внешняя сила или инерция. То есть даже в состоянии, когда преобразователь 1 питания не выдает напряжение АС, электродвигатель 2 может вращаться, например, за счет внешней силы. Кроме того, даже в том случае, когда внешняя сила исчезает в состоянии, когда электродвигатель 2 вращается за счет внешней силы, электродвигатель 2 продолжает вращаться в течение некоторого времени за счет инерции. В соответствии с другим вариантом, когда преобразователь 1 питания перестает выдавать напряжение АС в результате состояния выдачи напряжения АС, электродвигатель 2 продолжает вращаться в течение некоторого времени за счет инерции.
В приведенном на Фиг. 1 иллюстративном примере детектор 3 напряжения содержит резистивные делители R11, R12, R21 и R22 напряжения. Резистивные делители R11 и R12 напряжения последовательно соединены друг с другом в цепи 31. Резистивные делители R21 и R22 напряжения последовательно соединены друг с другом в цепи 32.
В детекторе 3 напряжения во время периода, в котором индуцированное напряжение Vw представляет собой индуцированное напряжение минимальной фазы, линейное индуцированное напряжение Vun подается между линиями Pu и Pw АС через цепь 31, линию L2 DC и диод Dwn. При этом на диод Dwn подается напряжение в прямом направлении, и, следовательно, это напряжение диода Dwn является практически нулевым. В связи с этим, совокупность двухсторонних напряжений резистивных делителей R11 и R12 напряжения практически равна линейному индуцированному напряжению Vun, которое является разностью потенциалов между индуцированным напряжением Vu и индуцированным напряжением Vw минимальной фазы. Аналогичным образом, совокупность двухсторонних напряжений резистивных делителей R21 и R22 напряжения практически равна линейному индуцированному напряжению Vvn, которое является разностью потенциалов между индуцированным напряжением Vv и индуцированным напряжением Vw минимальной фазы.
Кроме того, во время периода, в котором индуцированное напряжение Vv представляет собой индуцированное напряжение минимальной фазы, линейное индуцированное напряжение Vun подается между линиями Pu и Pv АС через цепь 31, линию L2 DC и диод Dvn. При этом на диод Dvn подается напряжение в прямом направлении, и, следовательно, это напряжение диода Dvn является практически нулевым. В связи с этим, при этом совокупность двухсторонних напряжений резистивных делителей R11 и R12 напряжения практически равна линейному индуцированному напряжению Vun. С другой стороны, поскольку потенциалы линии L2 DC и линии Pv АС практически равны друг другу, совокупность двухсторонних напряжений резистивных делителей R21 и R22 напряжения практически равна нулю. В этом периоде ввиду того, что линейное индуцированное напряжение Vvn является нулевым, совокупность двухсторонних напряжений резистивных делителей R21 и R22 напряжения практически равна линейному индуцированному напряжению Vun.
Во время периода, в котором индуцированное напряжение Vu представляет собой индуцированное напряжение минимальной фазы, линейное индуцированное напряжение Vvn подается между линиями Pu и Pv АС через цепь 32, линию L2 DC и диод Dun. При этом на диод Dun подается напряжение в прямом направлении, и, следовательно, это напряжение является практически нулевым. В связи с этим, при этом совокупность двухсторонних напряжений резистивных делителей R21 и R22 напряжения практически равна линейному индуцированному напряжению Vvn, а совокупность двухсторонних напряжений резистивных делителей R11 и R12 напряжения практически равна линейному индуцированному напряжению Vun.
Следовательно, напряжения, подаваемые на резистивные делители R11 и R12 напряжения, соответствуют линейному индуцированному напряжению Vun, а напряжения, подаваемые на резистивные делители R21 и R22 напряжения, соответствуют линейному индуцированному напряжению Vvn. В связи с этим, путем определения этих напряжений могут быть определены линейные индуцированные напряжения Vun и Vvn.
В приведенном на Фиг. 1 иллюстративном примере детектор 3 напряжения детектирует напряжение Vun1 резистивного делителя напряжения (например, резистивного делителя R12 напряжения на стороне линии L2 DC) в цепи 31 в качестве линейного индуцированного напряжения Vun и детектирует напряжение Vun2 резистивного делителя напряжения (например, резистивного делителя R22 напряжения на стороне линии L2 DC) в цепи 32 в качестве линейного индуцированного напряжения Vvn. В связи с этим, за счет меньшей величины напряжения могут детектироваться линейные индуцированные напряжения Vun и Vvn. Целесообразно, чтобы разность между коэффициентом деления резистивных делителей R11 и R12 напряжения и коэффициентом деления резистивных делителей R21 и R22 напряжения была незначительной. Это вызвано тем, что когда возникают эти разности, возникает разность между моментом времени, когда изменяется количественное соотношение между напряжениями Vun1 и Vun2, и моментом времени, когда изменяется количественное соотношение между линейными индуцированными напряжениями Vun и Vvn.
Как указано выше, ввиду того, что у детектора 3 напряжения имеются цепи 31 и 32, которые соединяют друг с другом линию L2 DC и каждую из линий Pu и Pv АС, напряжения в цепях 31 и 32 могут детектироваться в качестве линейных индуцированных напряжений Vun и Vvn.
В случае, когда предусмотрен конденсатор С, целесообразно, чтобы детектор 3 напряжения мог детектировать линейное индуцированное напряжение в состоянии, когда на конденсатор С подано напряжение. Это вызвано тем, что когда линии Pu, Pv и Pw АС замкнуты накоротко через конденсатор С и диоды Dxp и Dxn, ток не протекает через цепи 31 и 32 беспрепятственно.
В соответствии с детектором 3 напряжения, линейные индуцированные напряжения Vun и Vvn можно получить проще по сравнению, например, с нижеследующим случаем. То есть по сравнению со случаем детектирования индуцированных напряжений Vu, Vv и Vw, извлечения индуцированного напряжения минимальной фазы из детектированных индуцированных напряжений Vu, Vv и Vw и вычисления линейных индуцированных напряжений Vun и Vvn путем вычитания индуцированного напряжения минимальной фазы из детектированных индуцированных напряжений Vu и Vv, линейные индуцированные напряжения Vun и Vvn могут быть получены без труда.
В случае применения линейных индуцированных напряжений Vun и Vvn с использованием максимальной фазы в качестве опорной детектор 3 напряжения может детектировать напряжение между каждой из линий Pu и Pv АС и линией L1 DC.
В приведенном на Фиг. 1 иллюстративном примере напряжения Vun1 и Vun2 преобразуются в цифровые сигналы, например, с помощью аналого-цифровых преобразователей 41 и 42 соответственно, а преобразованные сигналы подаются на детектор 431.
<Пример конкретной операции детектора углового положения>
На Фиг. 7 приведен конкретный пример операции, которую выполняет детектор 4 углового положения. Последовательность обработки, изображенная на Фиг. 7, выполняется многократно в каждом заданном цикле (именуемом в дальнейшем вычислительным циклом). Сначала на Этапе S1 детектор 431 определяет, является ли текущее состояние состоянием А или состоянием В. При этом состояние А является состоянием, в котором линейное индуцированное напряжение Vun (или напряжение Vun1, в дальнейшем являющееся одинаковым в рассматриваемом варианте осуществления) больше линейного индуцированного напряжения Vvn (или напряжения Vvn1, в дальнейшем являющегося одинаковым в рассматриваемом варианте осуществления). Кроме того, состояние В является состоянием, в котором линейное индуцированное напряжение Vun меньше линейного индуцированного напряжения Vvn. Такое решение принимается на основе результата сравнения известного блока сравнения, который сравнивает, например, линейные индуцированные напряжения Vun и Vvn.
Далее, на этапе S2 детектор 431 решает, совпадает ли текущее состояние с состоянием последнего раза. Состояние последнего раза представляет собой состояние, когда в последний раз было определено расчетное значение углового положения. То есть состояние последнего раза представляет собой состояние после того, как количественное соотношение между линейными индуцированными напряжениями Vun и Vvn изменилось в последний раз.
При принятии на Этапе S2 положительного решения операция завершается. То есть если текущее состояние не изменилось после состояния последнего раза, операция завершается при условии, что количественное соотношение между линейными индуцированными напряжениями Vun и Vvn не изменилось.
C другой стороны, если на Этапе S2 принято отрицательное решение, это означает, что количественное соотношение между линейными индуцированными напряжениями Vun и Vvn изменилось. В связи с этим, на Этапе S3 блок 432 установки определяет расчетное значение углового положения. Определение этого расчетного значения осуществляется, например, с помощью последовательности обработки, изображенной на Фиг. 8.
Сначала на Этапе S31 блок 432 установки определяет, является ли текущее состояние состоянием А или состоянием В. Тот факт, что текущее состояние является состоянием В, означает, что состояние изменилось из состояния А в состояние В, то есть линейное индуцированное напряжение Vun стало ниже, чем линейное индуцированное напряжение Vvn. В связи с этим, если на Этапе S31 определено, что текущее состояние является состоянием В, блок 432 установки на Этапе S32 задает угловое положение равным 330 градусам (см. также Фиг. 3 и 4). С другой стороны, тот факт, что текущее состояние является состоянием А, означает, что состояние большой/малой величины изменилось из состояния В в состояние А, то есть, линейное индуцированное напряжение Vun превысило линейное индуцированное напряжение Vvn. В связи с этим, если на Этапе S31 определено, что текущее состояние является состоянием А, блок 432 установки задает угловое положение равным 150 градусам, например, на Этапе 33 (см. также Фиг. 3 и 4).
В соответствии с Фиг. 7, на Этапе S4, следующем за Этапом S3, блок 432 установки запоминает текущее состояние и завершает операцию. В связи с этим, на Этапе S2, который исполняется в следующем вычислительном цикле, текущее состояние используется в качестве состояния последнего раза.
Второй вариант осуществления
Во втором варианте осуществления детектор 3 напряжения содержит блок ограничения детектированного напряжения, который ограничивает детектированное напряжение заданной величиной в тех случаях, когда линейные индуцированные напряжения Vun и Vvn равны заданной опорной величине или превышают ее.
Например, как показано на Фиг. 9, детектор 3 напряжения дополнительно содержит схему 33 защиты по сравнению с детектором 3 напряжения на Фиг. 1. Схема 33 защиты, которая является примером блока ограничения детектированного напряжения, выдает напряжение заданной величины в детектор 4 углового положения, когда линейные индуцированные напряжения Vun и Vvn равны опорной величине или превышают ее. То есть схема 33 защиты предотвращает подачу напряжения, превышающего заданное значение (в дальнейшем также именуемое верхним предельным значением), на детектор 4 углового положения. В связи с этим, схема 33 защиты может защищать детектор 4 углового положения от избыточного напряжения.
Например, схема 33 защиты содержит диоды D1 и D2 и зенеровские диоды ZD1 и ZD2. Диод D1 предусмотрен между источником Е1 питания DC и точкой между резистивными делителями R11 и R12 напряжения и содержит катод на стороне источника Е1 питания DC. Диод D2 предусмотрен между источником Е1 питания DC и точкой между резистивными делителями R21 и R22 напряжения и содержит катод на стороне источника Е1 питания DC. Диоды D1 и D2 становятся проводящими, когда напряжения Vun1 и Vvn1 выше, чем напряжение источника Е1 питания DC, и пропускают ток на сторону источника Е1 питания DC. В связи с этим, напряжения Vun1 и Vvn1 могут быть зафиксированы на значении, практически равном напряжению источника Е1 питания DC.
Зенеровский диод ZD1 подключен параллельно резистивному делителю R12 напряжения и содержит анод на стороне линии L2 DC. Зенеровский диод ZD2 подключен параллельно резистивному делителю R22 напряжения и содержит анод на стороне линии L2 DC. Зенеровские диоды ZD1 и ZD2 становятся проводящими, когда напряжение, подаваемое на каждый зенеровский диод, превышает само напряжение Зенера, и поддерживают эти напряжения на уровне напряжения Зенера. В связи с этим, напряжения Vu1 и Vvn1 могут быть зафиксированы на уровне напряжения Зенера.
Напряжение Зенера зенеровских диодов ZD1 и ZD2 составляет, например, 5 В, а напряжение источника Е1 питания DC, например, также составляет 5 В. В связи с этим, во время периода, в котором каждое напряжение резистивных делителей R12 и R22 напряжения превышает 5 В ввиду того, что линейные индуцированные напряжения Vun и Vvn становятся выше опорного значения, напряжения Vun1 и Vun2 выдаются в детектор 4 углового положения, будучи ограниченными верхним предельным значением. Кроме того, нет необходимости предусматривать и диод D1, и зенеровский диод ZD1, а достаточно, чтобы предусматривался один из них. Однако ввиду того, что диод D1 имеет отличную чувствительность, фиксация может быть быстро осуществлена, когда линейное индуцированное напряжение превысило опорное значение. С другой стороны, поскольку зенеровский диод ZD1 может пропускать ток в цепь 31, напряжение Vun1 может ограничиваться при пропускании тока в цепь детектирования. Это применяется аналогичным образом к диоду D2 и зенеровскому диоду ZD2.
В приведенном на Фиг. 1 иллюстративном примере предусмотрен фильтр 34. Фильтр 34 подавляет шумы напряжений Vun1 и Vvn1.
Формы кривых напряжений Vun1 и Vvn1, детектируемых детектором 3 напряжения, принимают вид, например, изображенный на Фиг. 10 и 11. На Фиг. 10 и 11 показаны напряжения Vun1 и Vvn1 в том случае, когда максимальное значение линейных индуцированных напряжений Vun и Vvn превышает опорное значение Vref (см. также Фиг. 3 и 4). Кроме того, на Фиг. 10 показаны напряжения Vun1 и Vvn1 в направлении вращения вперед, а на Фиг. 11 показаны напряжения Vun1 и Vvn1 в направлении обратного вращения.
В соответствии с Фиг. 3 и 10 и Фиг. 4 и 11, во время периода, в котором линейное индуцированное напряжение Vun является нулевым, напряжение Vun1 также является нулевым. Во время периода, в котором линейное индуцированное напряжение Vun является нулевым относительно опорного значения Vref, напряжение Vun1 принимает форму, аналогичную форме линейного индуцированного напряжения Vun, а во время периода, в котором линейное индуцированное напряжение Vun больше или равно опорному значению Vref, напряжение Vun1 принимает верхнее предельное значение (например, 5 В). Это аналогичным образом применимо к напряжению Vvn1.
Для напряжений Vun1 и Vvn1 в тех случаях, когда напряжение Vun1 превышает напряжение Vvn1, линейное индуцированное напряжение Vun превышает линейное индуцированное напряжение Vvn (см. Фиг. 3 и 10). Следовательно, когда напряжение Vun1 превышает напряжение Vvn1, детектор 4 углового положения задает расчетное значение углового положения в этот момент времени, например, равным 150 градусов. С другой стороны, когда напряжение Vun1 становится ниже, чем напряжение Vvn1, линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn (см. Фиг. 4 и 11). Следовательно, когда напряжение Vun1 становится ниже, чем напряжение Vvn1, детектор 4 углового положения задает расчетное значение углового положения в этот момент времени, например, равным 330 градусов.
Таким образом, даже в том случае, когда используется рассматриваемый детектор 3 напряжения, угловое положение может надлежащим образом детектироваться независимо от направления вращения.
На Фиг. 12 изображена принципиальная конструкция еще одного примера детектора 3 напряжения в соответствии со вторым вариантом осуществления. Детектор 3 напряжения содержит резисторы R13, R14, R23 и R24 деления напряжения и зенеровские диоды ZD11 и ZD21.
Резистор R13 деления напряжения и зенеровский диод ZD11 соединены друг с другом последовательно в цепи 31, а резистор R23 деления напряжения и зенеровский диод ZD21 соединены друг с другом последовательно в цепи 32. Зенеровские диоды ZD11 и ZD21 предусмотрены на стороне линии L2 DC по отношению к резисторам R13 и R23 деления напряжения, соответственно, и содержат аноды на стороне линии L2 DC. Резистор R14 деления напряжения предусмотрен между источником Е1 питания DC и точкой между резистором R13 деления напряжения и зенеровским диодом ZD11, а резистор R24 деления напряжения предусмотрен между источником Е1 питания DC и точкой между резистором R23 деления напряжения и зенеровским диодом ZD21.
Детектор 3 напряжения детектирует напряжение Vun2 точки между резистором R13 деления напряжения и зенеровским диодом ZD11 в качестве линейного индуцированного напряжения Vun и детектирует напряжение Vvn2 точки между резистором R23 деления напряжения и зенеровским диодом ZD21 в качестве линейного индуцированного напряжения Vvn.
В детекторе 3 напряжения во время периода, в котором зенеровские диоды ZD11 и ZD21 становятся проводящими ввиду того, что линейные индуцированные напряжения Vun и Vvn превышают опорное значение Vref, напряжение Зенера зенеровских диодов ZD11 и ZD21 детектируется в качестве напряжений Vun2 и Vvn2. То есть зенеровские диоды ZD11 и ZD21 действуют как блоки ограничения детектируемого напряжения.
С другой стороны, во время периода, в котором зенеровские диоды ZD11 и ZD21 не становятся проводящими ввиду того, что линейные индуцированные напряжения Vun и Vvn становятся ниже, чем опорное значение Vref, напряжение (< напряжения Зенера), которое было поделено резисторами R13 и R14 деления напряжения, детектируется в качестве напряжения Vun2, а напряжение (< напряжения Зенера), которое было поделено резисторами R23 и R24 деления напряжения, детектируется в качестве напряжения Vvn2.
Следовательно, напряжения Vun2 и Vvn2, которые детектируются детектором 3 напряжения, имеют также формы кривых, аналогичные формам кривых на Фиг. 10 и 11. Однако верхнее предельное значение напряжений Vun2 и Vvn2 является напряжением Зенера зенеровских диодов ZD11 и ZD21, а нижнее предельное значение является напряжением, которое поделено резисторами R13, R14, R23 и R24 деления напряжения.
Однако даже в тех случаях, когда имеется такое различие, угловое положение при превышении напряжением Vun2 напряжения Vvn2 составляет 150 градусов, то есть такое же, как и угловое положение при превышении линейным индуцированным напряжением Vun линейного индуцированного напряжения Vvn. Аналогичным образом, угловое положение в тех случаях, когда напряжение Vun2 становится ниже, чем напряжение Vvn2, составляет 330 градусов, то есть такое же, как и угловое положение в тех случаях, когда линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn. Следовательно, когда напряжение Vun2 превышает напряжение Vvn2, детектор 4 углового положения задает расчетное значение углового положения равным 150 градусов, а когда напряжение Vun2 становится ниже, чем напряжение Vvn2, детектор 4 углового положения задает расчетное значение углового положения равным 330 градусов.
Как указано выше, даже в тех случаях, когда максимальное значение линейных индуцированных напряжений Vun и Vvn превышает опорное значение Vref, можно предотвратить подачу избыточного напряжения на детектор 4 углового положения, и, кроме того, угловое положение может детектироваться независимо от направления вращения.
В случае использования изображенного на Фиг. 9 детектора 3 напряжения коэффициент деления напряжения (= R12/(R11 + R12)) резистивных делителей R11 и R12 напряжения и коэффициент деления напряжения(= R22 / (R21 + R22) резистивных делителей R21 и R22 напряжения может быть повышен. Это вызвано тем, что даже если напряжения Vun1 и Vvn1 увеличились, ввиду того, что максимальное значение является верхним предельным значением, определяемым схемой 33 защиты, угловое положение может детектироваться при одновременной защите детектора 4 углового положения. В тех случаях, когда коэффициент деления напряжения увеличен, даже если скорость вращения электродвигателя 2 является низкой, а максимальное значение линейных индуцированных напряжений Vun и Vvn мало, напряжения Vun1 и Vvn1 могут быть увеличены. Если напряжения Vun1 и Vvn1 малы, влияние шума воспринимается легко. Однако, поскольку напряжения Vun1 и Vvn1 могут быть увеличены, точность оценки углового положения при низкой скорости вращения может быть повышена.
<Пример конкретной операции детектора углового положения>
Фиг. 13 представляет собой конкретный пример операции, которую выполняет детектор 4 углового положения. Последовательность обработки выполняется многократно, например, в каждом вычислительном цикле. Сначала детектор 431 на Этапе ST1 определяет, является ли напряжение Vun1 (или напряжение Vun2, в дальнейшем являющееся одинаковым) более высоким, чем пороговое значение. Указанное пороговое значение устанавливается заранее, при этом оно устанавливается равным несколько меньшему значению, чем, например, верхнее предельное значение. При принятии положительного решения детектор 431 на Этапе ST2 определяет, является ли напряжение Vvn1 (или напряжение Vvn2, в дальнейшем являющееся одинаковым) более высоким, чем пороговое значение.
При принятии положительного решения на Этапе ST2 детектор 4 углового положения на Этапе ST3 запоминает текущее состояние как состояние насыщения и завершает операцию. В периоде насыщения (см. также Фиг. 10 и 11), когда оба напряжения Vun1 и Vvn1 принимают верхнее предельное значение, количественное соотношение между напряжениями Vun1 и Vvn1 не меняется. В связи с этим, если текущее состояние является состоянием насыщения, операция завершается без выполнения этапов, описываемых ниже. Следовательно, число обработок может быть сокращено.
На Этапе ST1 или Этапе ST2 в тех случаях, когда принято отрицательное решение, детектор 431 на Этапе ST4 определяет текущее состояние. На обоих этапах ST1 и ST2 ввиду того, что принято отрицательное решение, текущее состояние представляет собой одно из состояний А и В. Далее на Этапе ST5 детектор 431 определяет, совпадает ли текущее состояние с текущим состоянием в вычислительном цикле непосредственно перед этим.
Если на Этапе ST5 принято положительное решение, операция завершается. То есть если текущее состояние совпадает с состоянием в вычислительном цикле непосредственно перед этим, операция завершается при условии, что количественное соотношение между линейными индуцированными напряжениями Vun1 и Vvn1 не изменилось. С другой стороны, если на Этапе ST5 принято отрицательное решение, детектор 431 на Этапе ST6 определяет, является ли текущее состояние в вычислительном цикле непосредственно перед этим состоянием насыщения. Если принято положительное решение, детектор 431 запоминает текущее состояние (одно из состояний А и В) на Этапе ST7 и завершает операцию. То есть если текущее состояние непосредственно перед этим является состоянием насыщения, при условии, что количественное соотношение между напряжениями Vun1 и Vvn1 не изменилось, текущее состояние обновляется, и операция завершается.
Если на Этапе ST6 принято отрицательное решение, блок 432 установки на Этапе ST8 задает расчетное значение углового положения. Задание расчетного значения осуществляется с помощью последовательности обработки, например, изображенной на Фиг. 8. Затем блок 432 установки запоминает текущее состояние (одно из состояний А и В) Этапе ST9 и завершает операцию.
В первом периоде, в котором одно из напряжений Vun1 и Vvn1 принимает верхнее предельное значение, аналогично периоду насыщения, количественное соотношение между напряжениями Vun1 и Vvn1 не изменяется (см. также Фиг. 10). Следовательно, также в первом периоде может быть выполнен Этап ST3 без выполнения Этапов с ST4 по ST7. То есть Этапы с ST4 по ST7 могут выполняться только во втором периоде, в котором ни одно из напряжений Vun1 и Vvn2 не принимает верхнее предельное значение. Однако в том случае, если второй период, например, короче вычислительного цикла, детектор 4 углового положения не может работать во множестве моментов времени во втором периоде и не может надлежащим образом определять количественное соотношение между напряжениями Vun1 и Vvn1. С другой стороны, в соответствии с операцией на Фиг. 13, даже в тех случаях, когда второй период короче вычислительного цикла, если сумма первого периода и второго периода существенно больше вычислительного цикла, изменение количественного соотношения между напряжениями Vun1 и Vvn1 может детектироваться. Следовательно, вычислительный цикл не обязательно должен устанавливаться более коротким, чем второй период, при этом для детектора 4 углового положения может использоваться недорогое устройство обработки, имеющее низкую скорость обработки.
Третий вариант осуществления
В третьем варианте осуществления может быть задано направление вращения. В качестве элемента, отличающегося от первого варианта осуществления, рассматриваемый механизм привода электродвигателя дополнительно снабжен блоком 5 задания направления вращения, изображенным на Фиг. 14. Блок 5 задания направления вращения принимает от детектора 431 информацию о том, что линейные индуцированные напряжения равны друг другу, и дополнительно принимает, по меньшей мере, одно из линейных индуцированных напряжений Vun и Vvn.
Блок 5 задания направления вращения задает направление вращения в виде заданного направления на основе, по меньшей мере, одного из значений линейных индуцированных напряжений Vun и Vvn, когда линейные индуцированные напряжения Vun и Vvn равны друг другу. Это будет описываться подробнее.
Как показано на Фиг. 3, в направлении вращения вперед линейные индуцированные напряжения Vun и Vvn в тех случаях, когда линейное индуцированное напряжение Vun превышает линейное индуцированное напряжение Vvn (когда угловое положение составляет 150 градусов), принимают относительно небольшое значение (например, нулевое). В дальнейшем в этом документе линейные индуцированные напряжения Vun и Vvn в тех случаях, когда линейное индуцированное напряжение Vun превышает линейное индуцированное напряжение Vvn, будут называться линейными индуцированными напряжениями VunK и VvnK соответственно. Кроме того, как приведено в качестве иллюстративного примера на Фиг. 4, в направлении обратного вращения линейные индуцированные напряжения VunK и VvnK принимают относительно большие значения.
То есть несмотря на то, что угловое положение при превышении линейным индуцированным напряжением Vun линейного индуцированного напряжения Vvn принимает заданное значение (например, 150 градусов) независимо от направления вращения, значения линейных индуцированных напряжений VunK и VvnK при этом различаются в зависимости от направления вращения. Таким образом, блок 5 задания направления вращения задает направление вращения на основе линейных индуцированных напряжений VunK и VvnK.
Кроме того, как показано на Фиг. 3, в направлении вращения вперед линейные индуцированные напряжения Vun и Vvn в тех случаях, когда линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn (когда угловое положение составляет 330 градусов), принимают относительно большие значение. В дальнейшем в этом документе линейные индуцированные напряжения Vun и Vvn в тех случаях, когда линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn, будут называться линейными индуцированными напряжениями VunL и VvnL соответственно. Кроме того, как приведено в качестве иллюстративного примера на Фиг. 4, в направлении обратного вращения линейные индуцированные напряжения VunL и VvnL принимают относительно небольшие значения (например, нулевые).
То есть несмотря на то, что угловое положение в тех случаях, когда линейное индуцированное напряжение Vun становится ниже, чем линейное индуцированное напряжение Vvn, принимает заданное значение (например, 330 градусов) независимо от направления вращения, значения линейных индуцированных напряжений VunL и VvnL при этом различаются в зависимости от направления вращения. Таким образом, блок 5 задания направления вращения может задавать направление вращения на основе линейных индуцированных напряжений VunL и VvnL вместо линейных индуцированных напряжений VunK и VvnK или вместе с линейными индуцированными напряжениями VunK и VvnK.
<Первый конкретный пример способа задания направления вращения>
Если линейное индуцированное напряжение Vun превысило линейное индуцированное напряжение Vvn, блок 5 задания направления вращения сравнивает линейное индуцированное напряжение VunK (или линейное индуцированное напряжение VvnK, в дальнейшем являющееся одинаковым) и заданное пороговое значение. Заданное пороговое значение представляет собой значение, большее, например, минимального значения (практически нулевого) линейных индуцированных напряжений Vun и Vvn. При этом, если линейное индуцированное напряжение VunK больше заданного порогового значения, блок 5 задания направления вращения задает направления вращения в виде заданного направления (в данном случае направления обратного вращения) как направления вращения, когда линейное индуцированное напряжение VunK больше порогового значения, а если линейное индуцированное напряжение VunK меньше заданного порогового значения, блок 5 задания направления вращения задает направления вращения в виде противоположного направления (в данном случае направления вращения вперед). Если пороговое значение устанавливается ближе к минимальному значению, даже в тех случаях, когда максимальное значение линейного индуцированного напряжения Vun мало (то есть скорость вращения мала), направление вращения может быть задано.
В соответствии с другим вариантом, если линейное индуцированное напряжение Vun стало ниже, чем линейное индуцированное напряжение Vvn, блок 5 задания направления вращения может сравнивать линейное индуцированное напряжение VunL (или линейное индуцированное напряжение VvnL, в дальнейшем являющееся одинаковым) и заданное пороговое значение. При этом в тех случаях, когда линейное индуцированное напряжение VunL больше заданного порогового значения, блок 5 задания направления вращения задает направление вращения в виде направления вращения вперед, а в тех случаях, когда линейное индуцированное напряжение VunL меньше порогового значения, блок 5 задания направления вращения задает направление вращения в виде направления обратного вращения.
<Второй конкретный пример способа задания направления вращения>
В направлении вращения вперед, как показано на Фиг. 3, линейные индуцированные напряжения VunK и VvnK меньше, чем линейные индуцированные напряжения VunL и VvnL. Кроме того, в направлении обратного вращения, как показано на Фиг. 4, линейные индуцированные напряжения VunK и VvnK больше, чем линейные индуцированные напряжения VunL и VvnL.
Блок 5 задания направления вращения может задавать направление вращения на основе количественного соотношения между линейными индуцированными напряжениями VunK и VunL или количественного соотношения между линейными индуцированными напряжениями VvnK и VvnL.
В частности, например, если линейное индуцированное напряжение VunK меньше, чем линейное индуцированное напряжение VunL, блок 5 задания направления вращения задает направление вращения в виде направления, определяемого заранее (в данном случае направления вращения вперед) и соответствующего тому, что линейное индуцированное напряжение VunK меньше, чем линейное индуцированное напряжение VunL. Если линейное индуцированное напряжение VunK больше, чем линейное индуцированное напряжение VunL, блок 5 задания направления вращения задает направление вращения в виде направления, определяемого заранее (в данном случае направления обратного вращения) и соответствующего тому, что линейное индуцированное напряжение VunK больше, чем линейное индуцированное напряжение VunL. В случае использования линейных индуцированных напряжений VvnK и VvnL это применяется аналогичным образом.
В соответствии со способом задания направления вращения, описанным выше, пороговое значение не обязательно должно устанавливаться заранее. В первом конкретном примере, когда скорость вращения является низкой, а максимальное значение линейных индуцированных напряжений Vun Vvn становится ниже, чем пороговое значение, направление вращения не может быть задано надлежащим образом. Во втором конкретном примере такой ситуации можно избежать.
<Вычисление линейного индуцированного напряжения>
Во втором конкретном примере выполняется сравнение между линейными индуцированными напряжениями VunK и VunL. В этом случае результат вычисления, получаемый сложением или умножением линейных индуцированных напряжений VunK и VvnK, сравнивается с результатом вычисления линейных индуцированных напряжений VunL и VvnL.
На Фиг. 15 показан результат вычисления, получаемый сложением линейных индуцированных напряжений Vun и Vvn в направлении вращения вперед, а на Фиг. 16 показан результат вычисления, получаемый умножением линейных индуцированных напряжений Vun и Vvn в направлении вращения вперед. Вычисление не ограничивается только сложением или умножением, а может использовать и сложение, и умножение, и может дополнительно использовать сложение или умножение произвольных параметров.
Как можно понять из Фиг. 15, в направлении вращения вперед сумма линейных индуцированных напряжений VunK и VvnK может быть меньше, чем сумма линейных индуцированных напряжений VunL и VvnL. Это вызвано тем, что в направлении вращения вперед линейные индуцированные напряжения VunK и VvnK меньше, чем линейные индуцированные напряжения VunL и VvnL соответственно. С другой стороны, в направлении обратного вращения виду того, что линейные индуцированные напряжения VunK и VvnK больше, чем линейные индуцированные напряжения VunL и VvnL соответственно (см. Фиг. 4), сумма (VunK + VvnK) больше, чем сумма (VunL + VvnL). Следовательно, в тех случаях, когда сумма (VunK + VvnK) меньше, чем сумма (VunL + VvnL), блок 5 задания направления вращения задает направление вращения в виде направления вращения вперед, а в тех случаях, когда сумма (VunK + VvnK) больше, чем сумма (VunL + VvnL), блок 5 задания направления вращения задает направление вращения в виде направления обратного вращения.
Кроме того, как можно понять из Фиг. 16, в направлении вращения вперед произведение линейных индуцированных напряжений VunK и VvnK меньше, чем произведение линейных индуцированных напряжений VunL и VvnL. С другой стороны, в направлении обратного вращения произведение (VunK · VvnK) больше, чем произведение (VunL · VvnL). Следовательно, в тех случаях, когда произведение (VunK · VvnK) меньше, чем произведение (VunL, VvnL), блок 5 задания направления вращения может задавать направление вращения в виде направления вращения вперед, а в тех случаях, когда произведение (VunK · VvnK) больше, чем произведение (VunL, VvnL), блок 5 задания направления вращения может задавать направление вращения в виде направления обратного вращения.
Если скорость вращения электродвигателя 2 мала, максимальное значение линейных индуцированных напряжений Vun и Vvn мало. В связи с этим, в этом случае разность ΔV линейных индуцированных напряжений VunK и VunL (см. Фиг. 3 и 4) также мала. Следовательно, при сравнении между линейными индуцированными напряжениями VunK и VunL часто возникает ошибка. С другой стороны, В соответствии с рассматриваемым блоком 5 задания направления вращения, в результатах сравнения редко возникает ошибка. Это вызвано тем, что разность ΔSUM между суммой линейных индуцированных напряжений VunK и VvnK и суммой линейных индуцированных напряжений VunL и VvnL больше, чем разность ΔV между линейными индуцированными напряжениями VunK и VunL, а разность ΔMUL между произведением линейных индуцированных напряжений VunK и VvnK и произведением линейных индуцированных напряжений VunL и VvnL также больше, чем разность ΔV между линейными индуцированными напряжениями VunK и VunL. Таким образом, по сравнению со случаем сравнения между линейными индуцированными напряжениями VunK и VunL в результатах сравнения редко возникает ошибка.
<Пример конкретной операции для второго конкретного примера>
На Фиг. 17 приведен конкретный пример операции, которую выполняют детектор 4 углового положения и блок 5 задания направления вращения. Последовательность обработки на Фиг. 17 выполняется многократно в каждом вычислительном цикле. По сравнению с последовательностью обработки на Фиг. 7 в этой последовательности обработки добавлен Этап S5. Кроме того, на Этапе S4 помимо текущего состояния регистрируется линейное индуцированное напряжение Vun.
Этап S5 выполняется, если на Этапе S2 принято отрицательное решение, то есть если количественное соотношение между линейными индуцированными напряжениями Vun и Vvn изменилось. Этап S5 выполняется до или после Этапа 3, либо параллельно Этапу S3. На Этапе S5 блок 5 задания направления вращения задает направление вращения. На Фиг. 18 приведен пример конкретной операции. На Этапе S51 блок 5 задания направления вращения определяет, какое из состояний А и В является текущим состоянием. Если на Этапе S51 определено, что текущее состояние является состоянием В, на Этапе S52 блок 5 задания направления вращения определяет, меньше ли текущее линейное индуцированное напряжение Vun (≈ VunL), чем линейное индуцированное напряжение Vun (≈ VunK) в последний раз. Если принято положительное решение, блок 5 задания направления вращения на Этапе S54 решает, что направление вращения является направлением обратного вращения. Если принято отрицательное решение, блок 5 задания направления вращения на Этапе S55 решает, что направление вращения является направлением вращения вперед.
Если на Этапе S51 определено, что текущее состояние является состоянием А, на Этапе S53 блок 5 задания направления вращения определяет, меньше ли текущее линейное индуцированное напряжение Vun (≈ VunK), чем линейное индуцированное напряжение Vun (≈ VunK) последнего раза. Если принято положительное решение, выполняется Этап S55, а если принято отрицательное решение, выполняется Этап S54.
Четвертый вариант осуществления
Направление вращения также задается в четвертом варианте осуществления. В качестве элемента, отличающегося от второго варианта осуществления, рассматриваемый механизм привода электродвигателя дополнительно снабжен блоком 5 задания направления вращения, приведенным в качестве примера на Фиг. 14. Однако, как показано на Фиг. 10 и 11, будет рассматриваться случай, в котором верхнее предельное значение детектируется в виде напряжений Vun1 и Vvn1 (или напряжений Vun2 и Vvn2, в настоящем варианте осуществления являющихся одинаковыми). В связи с этим, в блок 5 задания направления вращения напряжения Vun1 и Vvn1 вводятся в виде линейных индуцированных напряжений Vun и Vvn.
<Третий конкретный пример способа задания направления вращения>
Как показано на Фиг. 10, в направлении вращения вперед несмотря на то, что имеется случай, в котором напряжение Vun1 превышает напряжение Vvn1, напряжение Vun1 никогда не становится ниже, чем напряжение Vvn1. В частности, несмотря на то, что происходит переход из состояния B (Vun1 < Vvn1) в состояние A (Vun1 > Vvn1), переход из состояния А в состояние В не происходит. Следовательно, в тех случаях, когда явление, состоящее в том, что напряжение Vun1 становится выше, чем напряжение Vvn1, для изменения количественного соотношения, происходит, по меньшей мере, два раза подряд, блок 5 задания направления вращения задает направление вращения в виде направления, определяемого заранее (в данном случае направления вращения вперед) и соответствующего тому, что напряжение Vun1 превышает напряжение Vvn1 последовательно.
Кроме того, в направлении обратного вращения, как показано на Фиг. 11, несмотря на то, что существует момент времени, когда напряжение Vun1 становится ниже, чем напряжение Vvn1, напряжение Vun1 никогда не превышает напряжение Vvn1. То есть несмотря на то, что происходит переход из состояния А в состояние В, обратный переход не происходит. Следовательно, в тех случаях, когда явление, состоящее в том, что напряжение Vun1 становится ниже, чем напряжение Vvn1, для изменения количественного соотношения, происходит, по меньшей мере, два раза подряд, блок 5 задания направления вращения задает направление вращения в виде направления, определяемого заранее (в данном случае направления обратного вращения) и соответствующего тому, что напряжение Vun1 становится ниже, чем напряжение Vvn1 последовательно.
<Четвертый конкретный пример способа задания направления вращения>
В направлении вращения вперед, как описано выше, в тех случаях, когда напряжения Vun1 и Vvn1 ограничены верхними предельными значениями, происходит только переход из состояния В в состояние А. В связи с этим, в тех случаях, когда напряжение Vun1 или напряжение Vvn1 приняло верхнее предельное значение, а также в тех случаях, когда напряжение Vun1 превысило Vvn1, блок 5 задания направления вращения задает направление вращения в виде направления, определяемого заранее (в данном случае направления вращения вперед) и соответствующего этому.
В частности, блок 5 задания направления вращения определяет, принимают ли напряжения Vun1 и Vvn1 верхнее предельное значение, при этом, если принято положительное решение, блок 5 задания направления вращения активирует заданный флаг и записывает его. Если напряжения Vun1 превысило напряжения Vvn1 в состоянии, когда этот флаг активируется, блок 5 задания направления вращения задает направление вращения в виде направления вращения вперед.
Кроме того, как описано выше, в направлении обратного вращения в том случае, когда напряжения Vun1 и Vvn1 ограничены верхними предельными значениями, происходит только переход из состояния А в состояние В. В связи с этим, если напряжение Vun1 или напряжение Vvn1 приняло верхнее предельное значение, а также в тех случаях, когда напряжение Vun1 стало ниже, чем напряжение Vvn1, блок 5 задания направления вращения задает направление вращения в виде направления, определяемого заранее (в данном случае направления обратного вращения) и соответствующего этому.
В частности, блок 5 задания направления вращения определяет, принимают ли напряжения Vun1 и Vvn1 верхнее предельное значение, при этом, если принято положительное решение, блок 5 задания направления вращения активирует заданный флаг и записывает его. В состоянии, когда этот флаг активируется, если напряжения Vun1 стало ниже, чем напряжения Vvn1, направление вращения задается в виде направления обратного вращения.
<Пятый конкретный пример способа задания направления вращения>
Как показано на Фиг. 10 и 11, порядок, в котором состояние, соответственно, становится состоянием насыщения, состоянием А и состоянием В, различается в зависимости от направления вращения. То есть в направлении вращения вперед состояние В, состояние А и состояние насыщения возникают в указанном порядке, а в направлении обратного вращения состояние А, состояние В и состояние насыщения возникают в указанном порядке. Следовательно, в том случае, когда напряжения Vun1 и Vvn1 однократно приняли верхние предельные значения, блок 5 задания направления вращения может задавать направление вращения исходя из изменения этого состояния. Благодаря детектированию того, что одно из напряжений Vun1 и Vvn1 приняло верхнее предельное значение, этот факт записывается в виде флага. В состоянии, когда записывается флаг, когда было обнаружено, например, что состояние изменилось с состояния насыщения на состояние В, что состояние изменилось с состояния В на состояние А или что состояние изменилось с состояния А на состояние насыщения, направление вращения задается в виде направления вращения вперед. Кроме того, в состоянии, когда флаг записан, когда было обнаружено, например, что состояние изменилось с состояния насыщения на состояние А, что состояние изменилось с состояния А на состояние В или что состояние изменилось с состояния В на состояние насыщения, направление вращения задается в виде направления обратного вращения.
Кроме того, благодаря обнаружению порядка возникновения состояния А, состояния В и состояния насыщения может быть задано направление вращения. Например, если обнаружено, что состояние А, состояние В и состояние насыщения многократно возникли в указанном порядке, направление вращения может быть задано в виде направления обратного вращения. Аналогичным образом, например, если обнаружено, что состояние В, состояние А и состояние насыщения многократно возникли в указанном порядке, направление вращения может быть задано в виде направления вращения вперед.
<Пример конкретной операции детектора углового положения и блока задания направления вращения в третьем конкретном примере>
Фиг. 19 представляет собой конкретный пример операции, которую выполняют детектор 4 углового положения и блок 5 задания направления вращения. Последовательность обработки является примером операции, когда используется изображенный на Фиг. 9 детектор 3 напряжения. По сравнению с приведенной на Фиг. 13 структурной схемой добавлен Этап ST10. Кроме того, на Этапе ST9 помимо текущего состояния регистрируется линейное индуцированное напряжение Vun.
Этап ST10 выполняется, если на Этапе ST6 принято отрицательное решение, то есть когда изменилось количественное соотношение между напряжениями Vun1 и Vvn1. Этап ST10 выполняется до или после Этапа ST8, либо параллельно Этапу ST8. На Этапе ST10 блок 5 задания направления вращения задает направление вращения. Пример конкретной операции изображен на Фиг. 20. Поскольку Этапы ST101 и ST104-ST107 являются такими же, как и Этапы S51-S55 на Фиг. 18, повторное описание не приводится.
Этап ST102 выполняется, когда текущее состояние определено как состояние В (Vun1<Vvn1) на Этапе ST101. На Этапе ST102 блок 5 задания направления вращения определяет, какое из состояний А и В является текущим состоянием последнего раза. Если определено, что состояние последнего раза является состоянием В (то есть тем же, что и текущее состояние), блок 5 задания направления вращения определяет на Этапе ST106, что направление вращения является направлением обратного вращения. То есть исходя из того, что переход из состояния А в состояние В происходит последовательно, блок 5 задания направления вращения определяет, что направление вращения является направлением обратного вращения.
Если на Этапе ST102 определено, что состояние последнего раза являлось состоянием А, то есть состоянием, отличным от текущего состояния, блок 5 задания направления вращения выполняет Этап ST104. То есть в том случае, когда происходят и переход из состояния А в состояние В, и переход из состояния В в состояние А, исходя из того, что напряжение Vun1 не принимает верхнее предельное значение, блок 5 задания направления вращения задает направление вращения путем выполнения той же обработки, что и в третьем варианте осуществления.
Этап ST 103 выполняется, если на Этапе ST101 определено, что текущее состояние является состоянием А. На Этапе ST103 блок 5 задания направления вращения определяет, какое из состояний А и В является состоянием последнего раза. Если определено, что состояние последнего раза является состоянием А (то есть тем же, что и текущее состояние), блок 5 задания направления вращения определяет на Этапе ST107, что направление вращения является направлением вращения вперед. То есть исходя из того, что переход из состояния В в состояние А происходит последовательно, блок 5 задания направления вращения определяет, что направление вращения является направлением вращения вперед.
Если на Этапе ST103 определено, что состояние последнего раза являлось состоянием В (то есть отличным от текущего состояния), блок 5 задания направления вращения выполняет Этап ST105. То есть, как и на Этапе ST102, в том случае, когда происходят и переход из состояния В в состояние А, и переход из состояния А в состояние В, исходя из того, что напряжение Vun1 не принимает верхнее предельное значение, блок 5 задания направления вращения задает направление вращения путем выполнения той же обработки, что и в третьем варианте осуществления.
Пятый вариант осуществления
Направление вращения также задается в пятом варианте осуществления. В качестве элемента, отличающегося от первого варианта осуществления, рассматриваемый механизм привода электродвигателя дополнительно снабжен блоком 5 задания направления вращения, изображенным на Фиг. 13.
В пятом варианте осуществления блок 5 задания направления вращения генерирует сигнал, аналогичный сигналу линейного индуцированного напряжения, когда направление вращения является направлением вращения вперед (именуемый в дальнейшем расчетным сигналом вращения вперед), и вычисляет коэффициент подобия вращения вперед между расчетным сигналом вращения вперед и детектированным линейным индуцированным напряжением. Затем блок 5 задания направления вращения задает направление вращения на основе коэффициента подобия вращения вперед. Если коэффициент подобия вращения вперед, например, выше, чем заданная величина, блок 5 задания направления вращения задает направление вращения в виде направления вращения вперед, а если коэффициент подобия вращения вперед меньше, чем заданная величина, блок 5 задания направления вращения задает направление вращения в виде направления обратного вращения.
Расчетный сигнал вращения вперед представляет собой, например, идеальное линейное индуцированное напряжение и приведен в качестве примера на Фиг. 3. Форма (за исключением амплитуды, периода и фазы) расчетного сигнала вращения вперед заранее регистрируется, например, в регистрирующей среде, не показанной на чертеже. В связи с этим, в тех случаях, когда можно детектировать амплитуду, фазу и период линейного индуцированного напряжения, расчетный сигнал вращения вперед может генерироваться на основе формы, зарегистрированной в регистрирующей среде.
Амплитуда, фаза и период линейного индуцированного напряжения находятся следующим образом. Из множества моментов времени, когда изменяется количественное соотношение между линейными индуцированными напряжениями Vun и Vvn, как описано выше, смежные два принимают значения 150 градусов и 330 градусов соответственно. В связи с этим, на основе множества моментов времени может быть получена информация о периоде. Кроме того, амплитуда может быть получена, например, как максимальное значение линейных индуцированных напряжений. В соответствии с другим вариантом, амплитуда может быть получена с помощью известного выражения на основе периода и параметра электродвигателя 2. Следовательно, блок 5 задания направления вращения может генерировать расчетный сигнал вращения вперед по форме, зарегистрированной в регистрирующей среде, и информации об амплитуде, периоде и фазе. Расчетный сигнал вращения вперед может быть выражен с помощью функции.
Затем блок 5 задания направления вращения вычисляет коэффициент подобия вращения вперед. Оценочная функция А1, относящаяся к коэффициенту подобия вращения вперед, может использовать, например, любое из нижеследующих выражений.
A1 = ∫ |Vun-Vun_N| d t (1)
A1 = ∫ (Vun-Vun_N)2 dt (2)
Здесь Vun_N - расчетный сигнал вращения вперед, относящийся к линейному индуцированному напряжению Vun. Несмотря на то, что в данном случае используется оценочная функция А1 линейного индуцированного напряжения Vun, может использоваться оценочная функция А1 на основе расчетного сигнала вращения вперед линейного индуцированного напряжения Vvn и детектированного линейного индуцированного напряжения Vun.
Несмотря на то, что в качестве периода интегрирования может использоваться произвольный период, может использоваться некоторая величина в соответствии с периодом линейного индуцированного напряжения Vun (например, один период, полупериод и двойной период). Такая величина может определяться на основе периода, получаемого, как описано выше. В соответствии с другим вариантом, в качестве периода интегрирования может использоваться, например, период от момента времени, когда изменилось количественное соотношение между линейными индуцированными напряжениями Vun и Vvn, до момента времени, когда количественное соотношение изменилось в следующий раз. В соответствии с другим вариантом, в качестве периода интегрирования может использоваться период, определяемый заранее. При определении периода интегрирования заранее целесообразно его определять с учетом диапазона, который может иметь скорость вращения электродвигателя 2 (периода линейного индуцированного напряжения).
Такая оценочная функция А1 принимает меньшее значение, когда детектированное линейное индуцированное напряжение Vun ближе к - расчетному сигналу Vun_N вращения вперед. В связи с этим, если оценочная функция А1 меньше, чем заданное значение, блок 5 задания направления вращения задает направление вращения в виде направления вращения вперед. Кроме того, если оценочная функция А1 выше, чем заданное значение, то есть если коэффициент подобия вращения вперед ниже, чем заданное значение, блок 5 задания направления вращения задает направление вращения в виде направления обратного вращения.
Кроме того, расчетный сигнал вращения вперед не обязательно ограничен сигналом, приведенным в качестве примера на Фиг. 3. Достаточно, чтобы расчетный сигнал вращения вперед имел огибающую, подобную огибающей линейного индуцированного напряжения. Расчетный сигнал, имеющий подобную огибающую, означает, что линейное индуцированное напряжение принимает нижнее предельное значение, например, расчетный сигнал вращения вперед может принимать нижнее предельное значение, а если линейное индуцированное напряжение принимает большее значение, чем нижнее предельное значение, расчетный сигнал вращения вперед может принимать большее значение, чем нижнее предельное значение. Например, расчетный сигнал вращения вперед может представлять собой прямоугольный импульс, приведенный в качестве примера на Фиг. 21.
Наряду с коэффициентом подобия вращения вперед между детектированным линейным индуцированным напряжением и расчетным сигналом вращения вперед может использоваться коэффициент подобия обратного вращения между детектированным линейным индуцированным напряжением и расчетным сигналом обратного вращения. В соответствии с другим вариантом, могут использоваться и коэффициент подобия вращения вперед, и коэффициент подобия обратного вращения. Этот случай будет рассматриваться подробно.
Блок 5 задания направления вращения генерирует не только расчетный сигнал вращения вперед, но и расчетный сигнал обратного вращения. Поскольку генерирование расчетного сигнала обратного вращения аналогично генерированию расчетного сигнала вращения вперед, повторное описание не приводится. Оценочная функция А2 коэффициента подобия обратного вращения может использовать, например, одно из нижеследующих уравнений.
A2 = ∫|Vun-Vun_I|dt (3)
A2 = ∫(Vun-Vun_I)2dt (4)
Здесь Vun_I - расчетный сигнал обратного вращения линейного индуцированного напряжения Vun. Период интегрирования - такой же, как и период интегрирования, используемый в Выражениях (1) и (2).
Если оценочная функция А1 меньше, чем оценочная функция А2, то есть если коэффициент подобия вращения вперед выше коэффициента подобия обратного вращения, блок 5 задания направления вращения может задавать направление вращения в виде направления вращения вперед. Если оценочная функция А1 больше, чем оценочная функция А2, то есть если коэффициент подобия вращения вперед ниже коэффициента подобия обратного вращения, блок 5 задания направления вращения может задавать направление вращения в виде направления обратного вращения.
В соответствии с заданием направления вращения, как описано выше, поскольку даже в том случае, когда в обоих линейных индуцированных напряжениях Vun и Vvn возникает шум, аналогичный шум возникает в отношении оценочных функций А1 и А2, количественное соотношение между оценочными функциями А1 и А2 изменяется не всегда. В связи с этим, точность задания направления вращения может быть повышена.
В качестве одного из шумов, которые возникают в линейных индуцированных напряжениях Vun и Vvn, имеется смещение, описываемое применительно к Фиг. 25. Как показано на Фиг. 26, это смещение Vof возникает в обоих линейных индуцированных напряжениях Vun и Vvn, детектируемых детектором 3 напряжения. Кроме того, на Фиг. 26 несмотря на то, что смещение Vof демонстрирует постоянство во времени, смещение Vof в действительности изменяется в соответствии с изменением напряжения DC. В связи с этим, смещение Vof ведет себя как шум, который возникает в обоих линейных индуцированных напряжениях Vun и Vvn.
Кроме того, в качестве расчетного сигнала может использоваться сигнал, получаемый выполнением одного из вычислений сложения или умножения линейных индуцированных напряжениях Vun и Vvn. Кроме того, сумма линейных индуцированных напряжений Vun и Vvn во время нормального вращения выглядит так, как показано на Фиг. 15. В связи с этим, этот сигнал используется в качестве расчетного сигнала V_N вращения вперед во время нормального вращения. При этом в качестве оценочной функции А1 используется любое из нижеследующих выражений.
A1 = ∫|Vun+Vvn-V_N|dt (5)
A1 = ∫(Vun+Vvn-V_N)2dt (6)
Даже в этом случае, если оценочная функция А1 меньше, чем заданное значение, то есть, если коэффициент подобия вращения вперед больше, чем заданное значение, направление вращения может задаваться в виде направления вращения вперед, а во время обратного вращения может задаваться в виде направления обратного вращения.
Оценочная функция А1, когда электродвигатель 2 вращается в направлении обратного вращения при идеальной форме сигнала, принимает большее значение (приблизительно в два раза) в Выражении (5), чем в Выражении (1). Когда электродвигатель 2 вращается в направлении вращения вперед при идеальной форме сигнала, оценочная функция А1 принимает нулевое значение. В связи с этим, разность между оценочной функцией А1, когда электродвигатель 2 вращается в направлении вращения вперед, и оценочной функцией А1, когда электродвигатель 2 вращается в направлении обратного вращения, больше в Выражении (5), чем в Выражении (1). Поскольку направление вращения проще различать, когда разность больше, направление вращения электродвигателя 2 проще задавать путем использования оценочной функции А1 Выражения (5) вместо Выражения (1). Аналогичным образом, направление вращения электродвигателя 2 проще задавать путем использования оценочной функции А1 Выражения (6) вместо Выражения (2).
Кроме того, произведение линейных индуцированных напряжений Vun и Vvn во время нормального вращения выглядит, например, так, как показано на Фиг. 16. В связи с этим, этот сигнал может использоваться в качестве расчетного сигнала V_N вращения вперед во время нормального вращения. При этом в качестве оценочной функции А1 используется любое из нижеследующих выражений.
A1 = ∫|Vun*Vvn-V_N|dt (7)
A1 = ∫(Vun*Vvn-V_N)2dt (8)
Даже в этом случае, если оценочная функция А1 меньше, чем заданное значение, то есть, если коэффициент подобия вращения вперед больше, чем заданное значение, направление вращения может задаваться в виде направления вращения вперед, а во время обратного вращения может задаваться в виде обратного направления вращения.
Оценочная функция А1, когда электродвигатель 2 вращается в направлении обратного вращения при идеальной форме сигнала, принимает большее значение (приблизительно в четыре раза) в Выражении (7), чем в Выражении (1). Когда электродвигатель 2 вращается в направлении вращения вперед при идеальной форме сигнала, оценочная функция А1 принимает нулевое значение. В связи с этим, разность между оценочной функцией А1, когда электродвигатель 2 вращается в направлении вращения вперед, и оценочной функцией А1, когда электродвигатель 2 вращается в направлении обратного вращения, больше в Выражении (7), чем в Выражении (1). Следовательно, направление вращения электродвигателя 2 проще задавать путем использования оценочной функции А1 Выражения (7) вместо Выражения (1). Аналогичным образом, направление вращения электродвигателя 2 проще задавать путем использования оценочной функции А1 Выражения (8) вместо Выражения (2).
Коэффициент подобия обратного вращения может использоваться независимо от коэффициента подобия вращения вперед. Кроме того, благодаря использованию как коэффициента подобия вращения вперед, так и коэффициента подобия обратного вращения направление вращения может задаваться на основе количественного соотношения между коэффициентом подобия вращения вперед и коэффициентом подобия обратного вращения.
Шестой вариант осуществления
В шестом варианте осуществления будет вычисляться расчетное значение углового положения, отличного от углового положения, которое детектируется, как описано в первом или втором варианте осуществления.
Как показано в качестве примера на Фиг. 22, в шестом варианте осуществления дополнительно предусмотрен вычислитель 6 скорости вращения. Вычислитель 6 скорости вращения принимает от детектора 431 уведомление о том, что линейное индуцированное напряжение Vun (или напряжения Vun1 и Vun2, в дальнейшем являющиеся одинаковыми в настоящем варианте осуществления) и линейное индуцированное напряжение Vvn (или напряжения Vvn1 и Vvn2, в дальнейшем являющиеся одинаковыми в настоящем варианте осуществления) равны друг другу. Затем вычислитель 6 скорости вращения подсчитывает период, например, между множеством моментов времени, когда линейные индуцированные напряжения Vun и Vvn равны друг другу, и на основе этого периода вычисляет скорость |ω| вращения электродвигателя 2. Период может подсчитываться с помощью известной схемы таймера и т.п.
Кроме того, детектор 4 углового положения принимает направление D вращения от блока 5 задания направления вращения и принимает скорость |ω| вращения от вычислителя 6 скорости вращения.
Затем детектор 4 углового положения вычисляет расчетное значение θe углового положения в другой момент времени на основе расчетного значения θs (в данном случае 150 градусов или 330 градусов) углового положения, определяемого, когда линейные индуцированные напряжения Vun и Vvn равны друг другу, направления D вращения, скорости |ω| вращения и времени t от момента времени, когда было определено расчетное значение углового положения, до другого момента времени. Время t может быть подсчитано с помощью известной схемы таймера и т.п.
Если направление D вращения является направлением вращения вперед, расчетное значение θe углового положения выражается с помощью следующего выражения.
θe = θs + |ω| · t (9)
Если направление D вращения является направлением обратного вращения, расчетное значение θe углового положения выражается с помощью следующего выражения.
θe = θs - |ω| · t (10)
Детектор 4 углового положения вычисляет расчетное значение θe с помощью Выражений (9) и (10).
<Пример конкретной операции>
Фиг. 23 является конкретным примером операции, которую выполняют детектор 4 углового положения, блок 5 задания направления вращения и вычислитель 6 скорости вращения. Однако последовательность обработки является примером случая, в котором расчетное значение θs углового положения определяется, как в первом варианте осуществления, а направление D вращения задается, как в третьем варианте осуществления. Последовательность обработки выполняется многократно в каждом вычислительном цикле.
Сначала на Этапе SP1 детектор 431 определяет, какое из состояний А и В является текущим состоянием. Затем на Этапе SP2 детектор 431 определяет, совпадает ли текущее состояние с состоянием последнего раза. Если принято отрицательное решение, то есть если количественное соотношение между линейными индуцированными напряжениями Vun и Vvn изменилось, вычислитель 6 скорости вращения на Этапе SP3 определяет, превышает ли значение счетчика периодов пороговое значение, определяемое заранее. Значение счетчика периодов является выходным значением известной схемы счетчика, подсчитываемым вместе с промежутком времени, и, например, суммируется на Этапе SP11, как описывается ниже.
Если на Этапе SP3 принято отрицательное решение, вычислитель 6 скорости вращения на Этапе SP4 оценивает, что скорость вращения является нулевой. Если на Этапе SP3 принято положительное решение, вычислитель 6 скорости вращения выполняет Этапы SP5-SP7. Порядок выполнения Этапов SP5-SP7 является произвольным, при этом Этапы SP5-SP7 могут выполняться параллельно друг другу.
На Этапе SP5 блок 432 установки определяет расчетное значение θs углового положения. Эта обработка выполняется с помощью последовательности обработки, изображенной, например, на Фиг. 8. На Этапе SP6 блок 5 задания направления вращения задает направление вращения. Эта обработка выполняется с помощью последовательности обработки, изображенной, например, на Фиг. 18. На Этапе SP7 вычислитель 6 скорости вращения вычисляет скорость |ω| вращения. Например, вычислитель 6 скорости вращения считывает значение счетчика периодов таким образом, что вычислитель 6 скорости вращения регистрирует время t, после которого количественное соотношение между линейными индуцированными напряжениями Vun и Vvn изменилось в последний раз, и на основе этого вычисляет скорость |ω| вращения. Например, на Фиг. 3 и 4 ввиду того, что количественное соотношение между линейными индуцированными напряжениями Vun и Vvn изменилось дважды за один период вращения, скорость |ω| вращения выражается как 1/(2t) [оборотов в секунду] (время t находится по счетчику периодов).
После того, как выполнен Этап SP4, либо после того, как выполнены Этапы SP5-SP7, выполняются Этапы SP8-SP9. Порядок выполнения Этапов SP8 и SP9 является произвольным, при этом Этапы SP8 и SP9 могут выполняться параллельно друг другу.
Блок 5 задания скорости вращения запоминает на Этапе SP8 линейное индуцированное напряжение Vun, а вычислитель 6 скорости вращения инициализирует на Этапе SP9 значение счетчика периодов.
С другой стороны, если на Этапе SP2 принято положительное решение, блок 432 установки на Этапе SP10 вычисляет расчетное значение θe углового положения на основе Выражения (9) или Выражения (10). То есть если количественное соотношение между линейными индуцированными напряжениями Vun и Vvn изменилось, блок 432 установки вычисляет угловое положение с помощью Выражения (9) или Выражения (10).
Затем после того, как выполнены оба Этапа SP8 и SP9, либо после того, как выполнен Этап SP10, на Этапе SP11 значение счетчика периодов увеличивается.
<Еще один пример конкретной операции>
Фиг. 24 является конкретным примером операции, которую выполняют детектор 4 углового положения, блок 5 задания направления вращения и вычислитель 6 скорости вращения. Однако последовательность обработки является примером случая, в котором расчетное значение θs углового положения определяется, как во втором варианте осуществления, а направление D вращения задается, как в четвертом варианте осуществления. Последовательность обработки выполняется многократно в каждом вычислительном цикле.
Поскольку обработка на Этапах SP21-SP27 такая же, как и на Этапах ST1-ST7 на Фиг. 19, описание не приводится. Если на Этапе SP26 принято отрицательное решение, вычислитель 6 скорости вращения на Этапе SP28 определяет, больше ли значение счетчика периодов, чем пороговое значение, определяемое заранее.
Если на Этапе SP28 принято отрицательное решение, вычислитель 6 скорости вращения на Этапе SP29 оценивает, что скорость вращения является нулевой. Если на Этапе SP28 принято положительное решение, выполняются Этапы SP30-SP32. Порядок выполнения Этапов SP30-SP32 является произвольным, при этом Этапы SP30-SP32 могут выполняться параллельно друг другу.
На Этапе SP30 блок 432 установки определяет расчетное значение θs углового положения. Эта обработка выполняется с помощью последовательности обработки, изображенной, например, на Фиг. 8. На Этапе SP31 блок 5 задания направления вращения задает направление вращения. Эта обработка выполняется с помощью последовательности обработки, изображенной, например, на Фиг. 19. На Этапе SP32 вычислитель 6 скорости вращения вычисляет скорость |ω| вращения. Эта обработка является такой же, как и Этап SP7, изображенный, например, на Фиг. 23.
После того, как выполнен Этап SP29, либо после того, как выполнены все Этапы SP30-SP32, выполняются Этапы SP33 и SP34. Порядок выполнения Этапов SP33 и SP34 является произвольным, при этом Этапы SP33 и SP34 могут выполняться параллельно друг другу. Этапы SP33 и SP34 являются такими же, как и Этапы SP8 и SP9, изображенные на Фиг. 23 соответственно.
Если на Этапе SP25 принято положительное решение, либо если выполнен Этап SP23 или Этап SP27, блок 432 установки на Этапе SP35 вычисляет расчетное значение θe углового положения на основе Выражения (9) или Выражения (10). То есть если количественное соотношение между линейными индуцированными напряжениями Vun и Vvn не изменилось, блок 432 установки вычисляет угловое положение с помощью Выражения (9) или Выражения (10).
Затем после того, как выполнены оба Этапа SP33 и SP34, либо после того, как выполнен Этап SP35, на Этапе SP36 значение счетчика периодов увеличивается.
Все функции или часть функций детектора 4 углового положения может быть реализована с помощью цифровой схемы, либо может быть реализована с помощью аналоговой схемы. Это применимо аналогичным образом к блоку 5 задания направления вращения и вычислителю 6 скорости вращения.
Несмотря на то, что настоящее изобретение подробно описано, приведенное выше описание является иллюстративным примером во всех отношениях, и настоящее изобретение этим не ограничивается. Понятно, что могут предполагаться различные модификации, не приведенные в качестве примера, в пределах объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОИНСТРУМЕНТ И СПОСОБ ОПРЕДЕЛЕНИЯ ДВИЖЕНИЯ СКРУЧИВАНИЯ ОСНОВНОГО КОРПУСА ЭЛЕКТРОИНСТРУМЕНТА И ОПРЕДЕЛЕНИЯ НАГРУЗКИ НА ВЫХОДНОЙ ВАЛ ЭЛЕКТРОИНСТРУМЕНТА | 2017 |
|
RU2746703C2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2477561C2 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2379821C1 |
| СИЛОВОЕ ПРЕОБРАЗОВАТЕЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2466040C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2480889C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РУЛЕВЫМ МЕХАНИЗМОМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2092359C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2481693C1 |
| СЕРВОПРЕСС-МАШИНА | 2009 |
|
RU2400368C1 |
| УСТРОЙСТВО МИКРОВОЛНОВОЙ ОБРАБОТКИ | 2007 |
|
RU2399170C1 |
| ПОМОЩНИК ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2492082C1 |
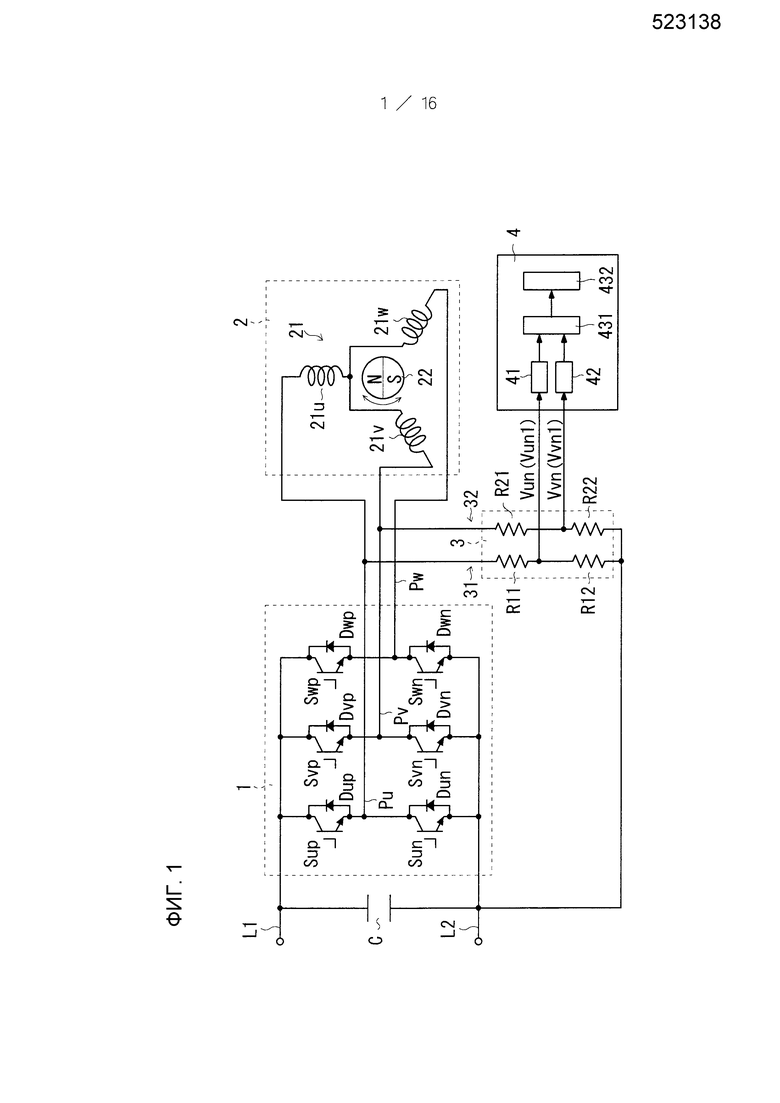
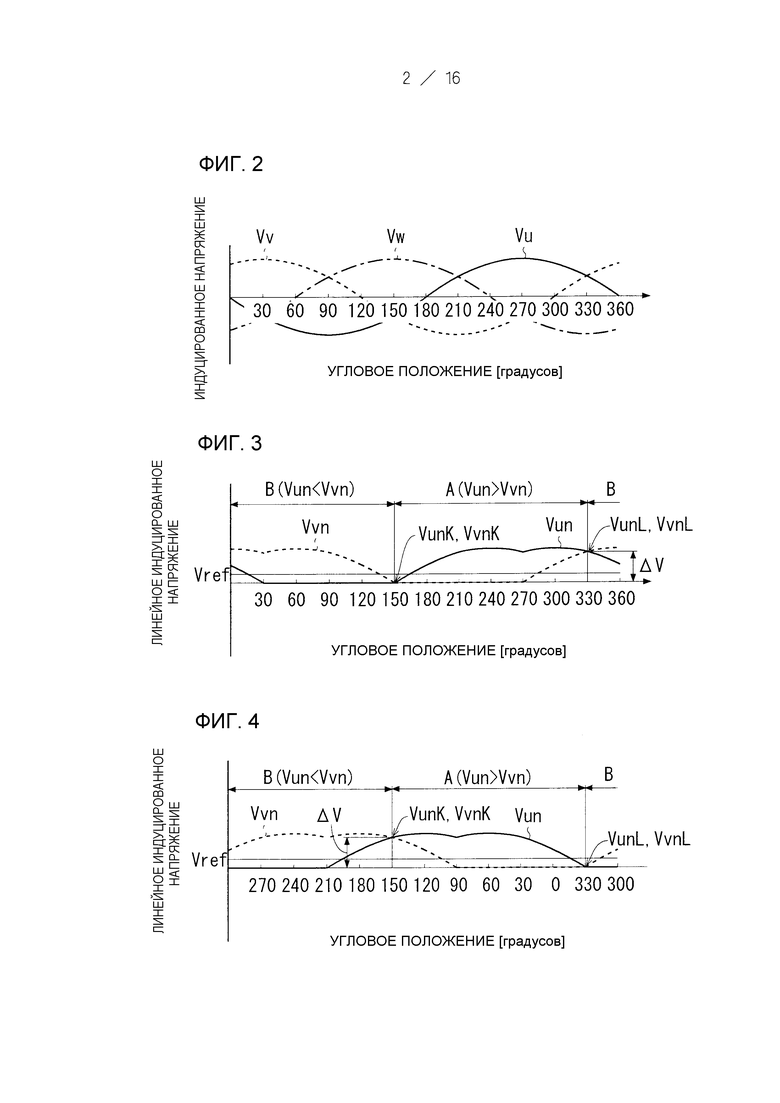
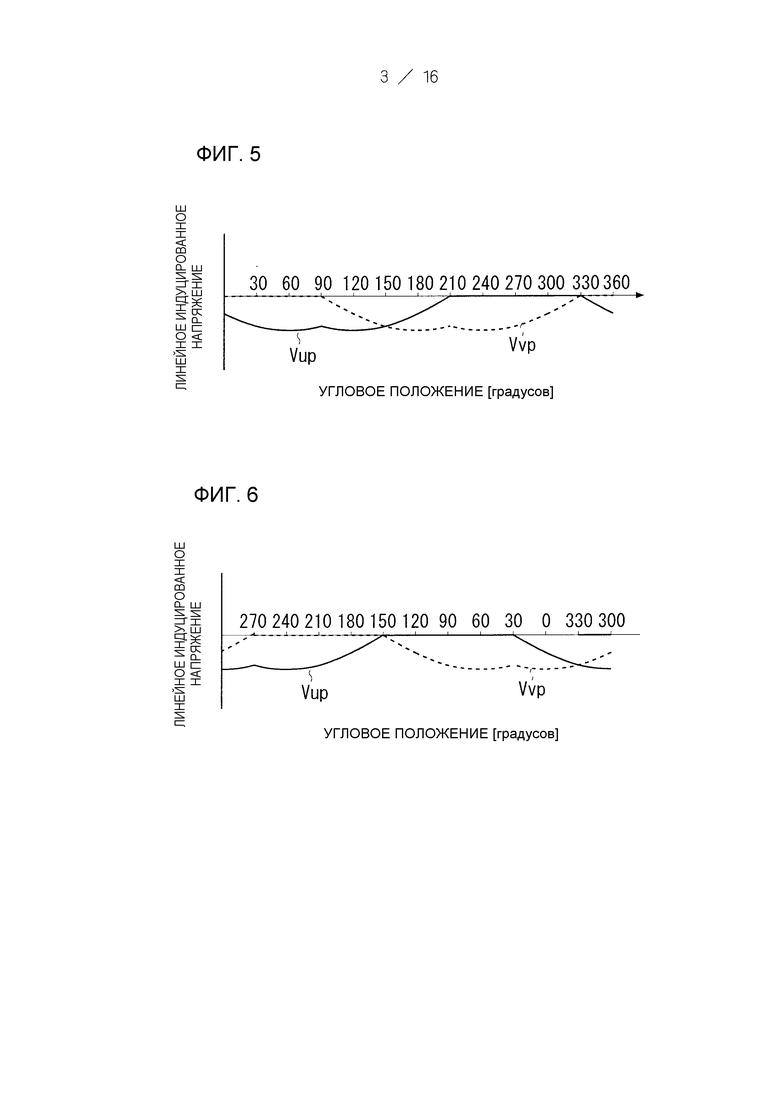
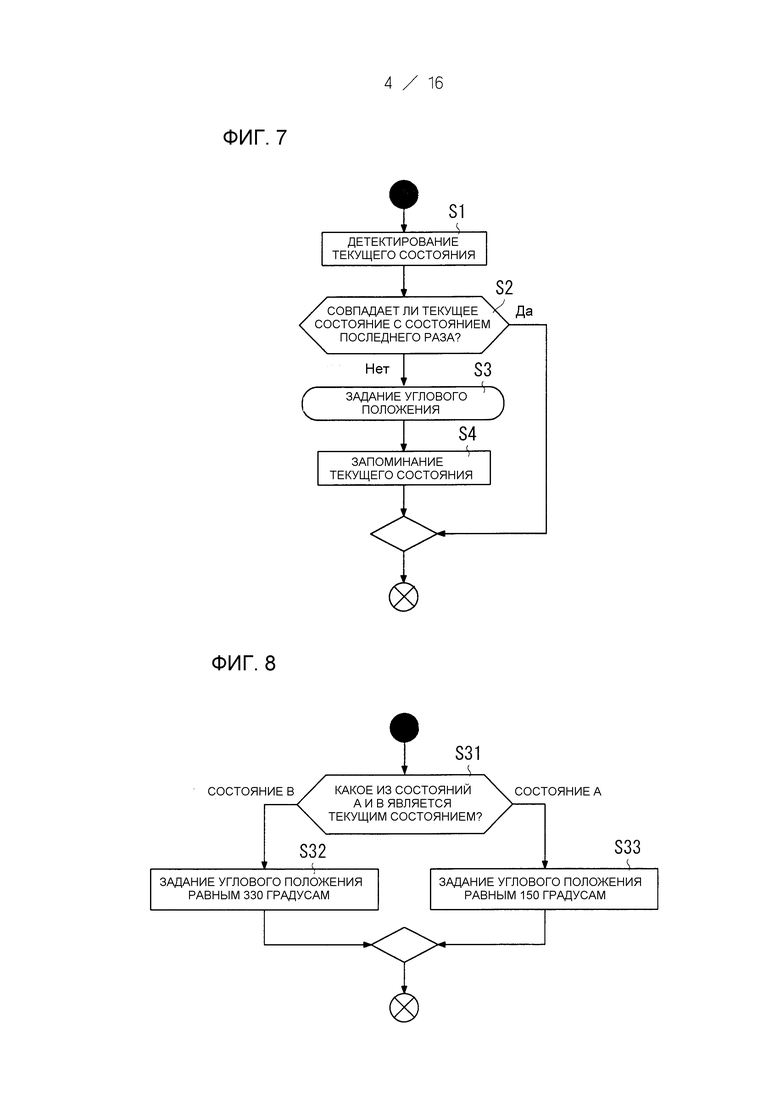

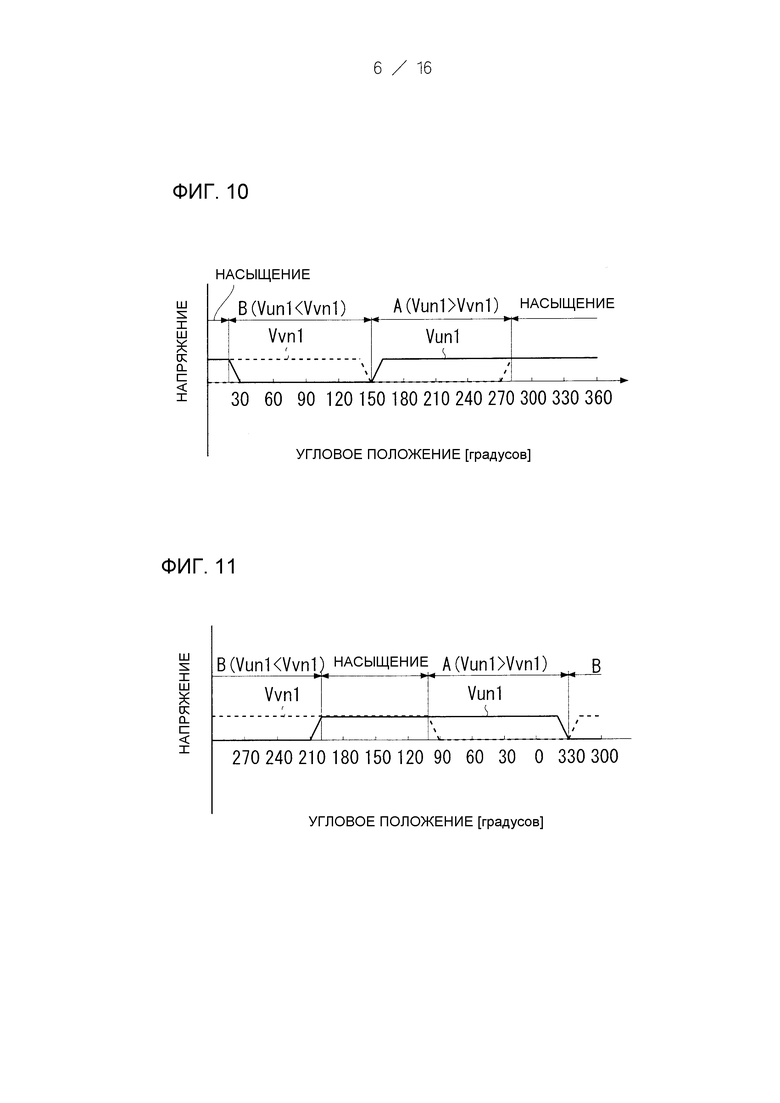
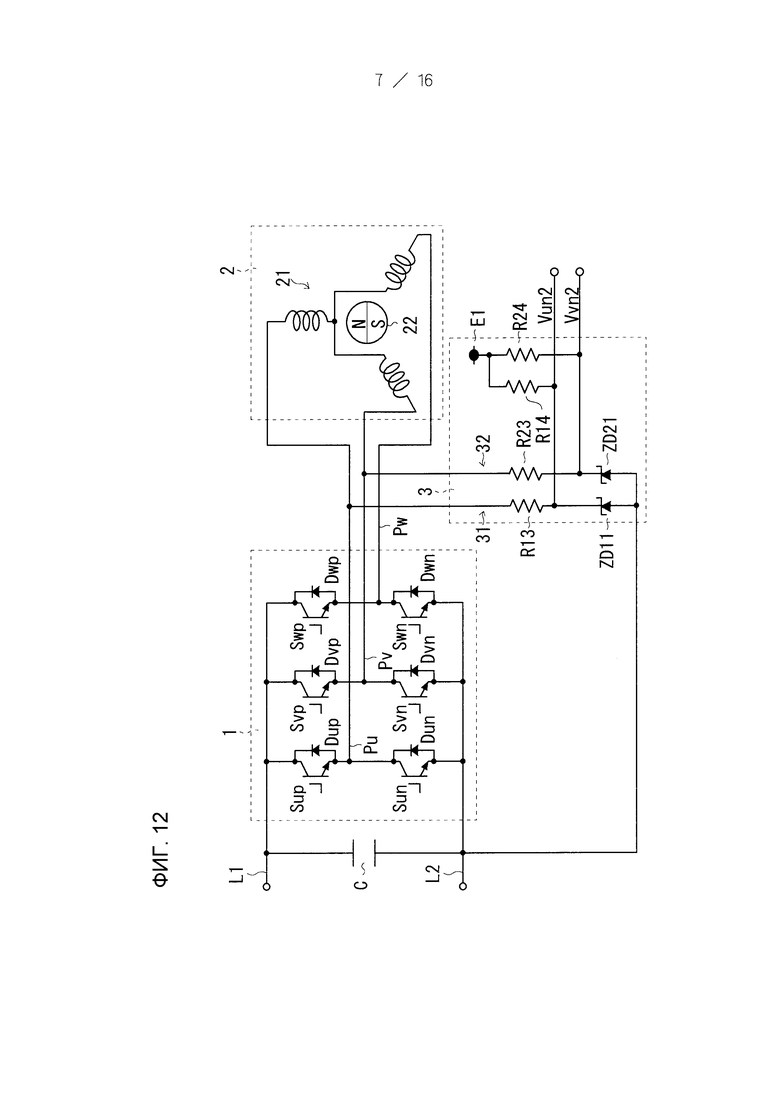



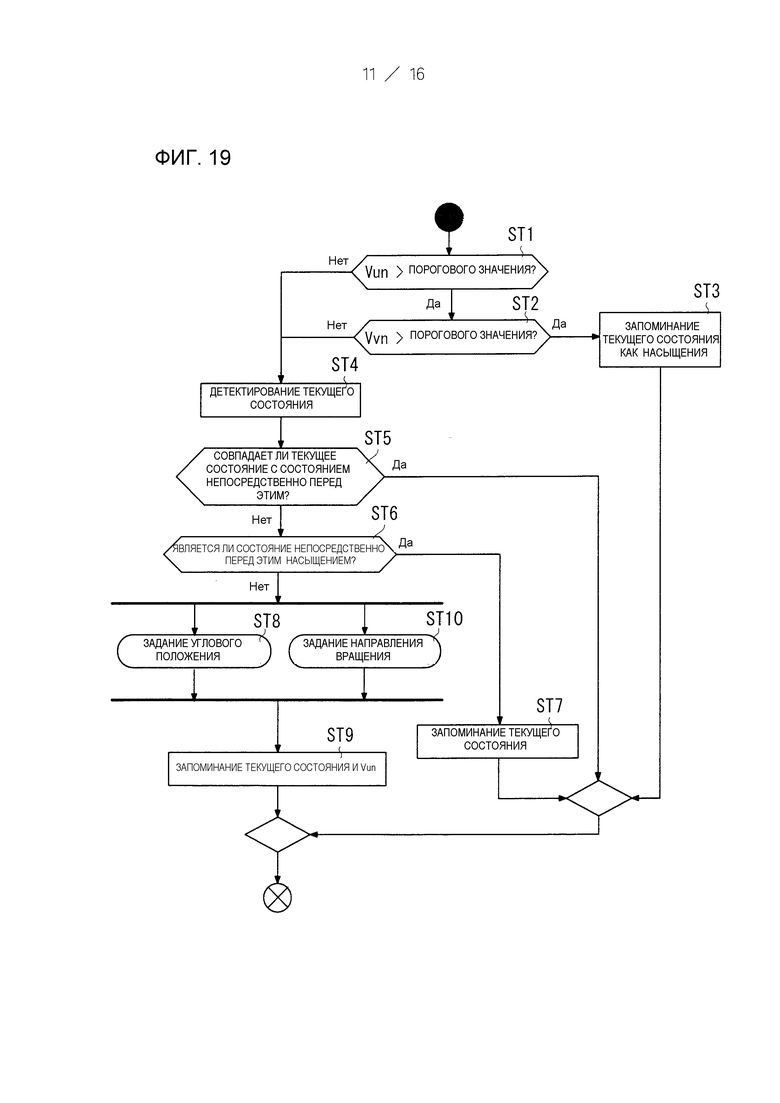
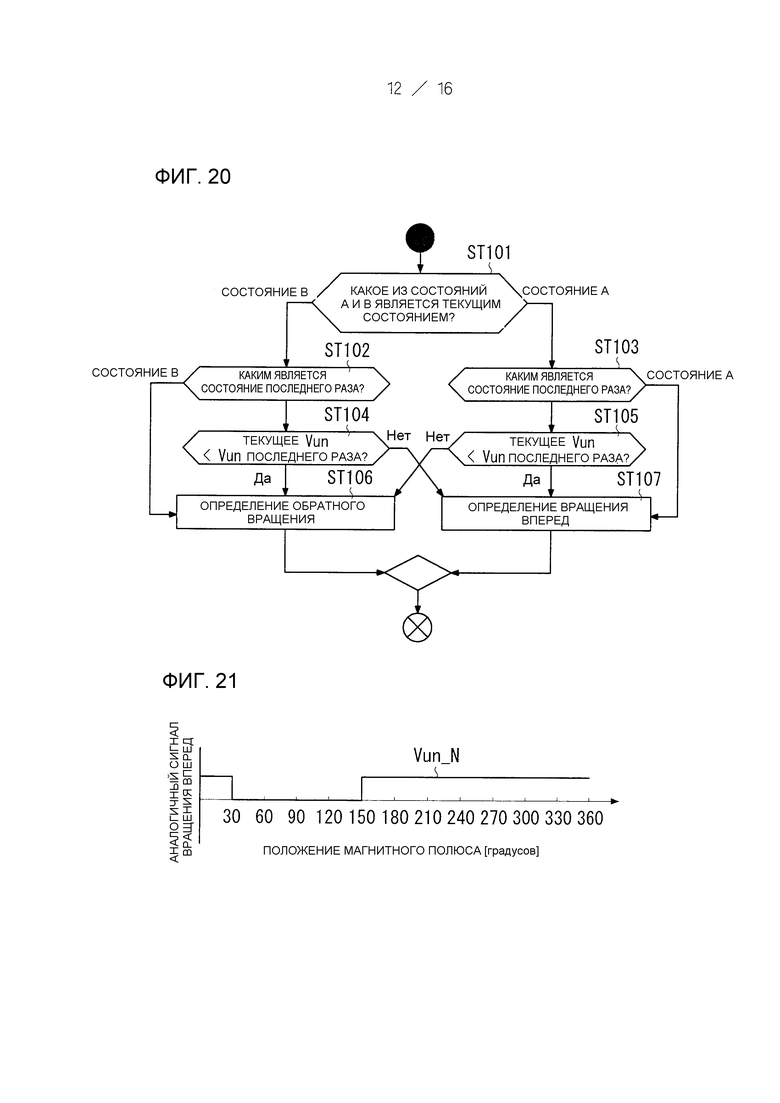

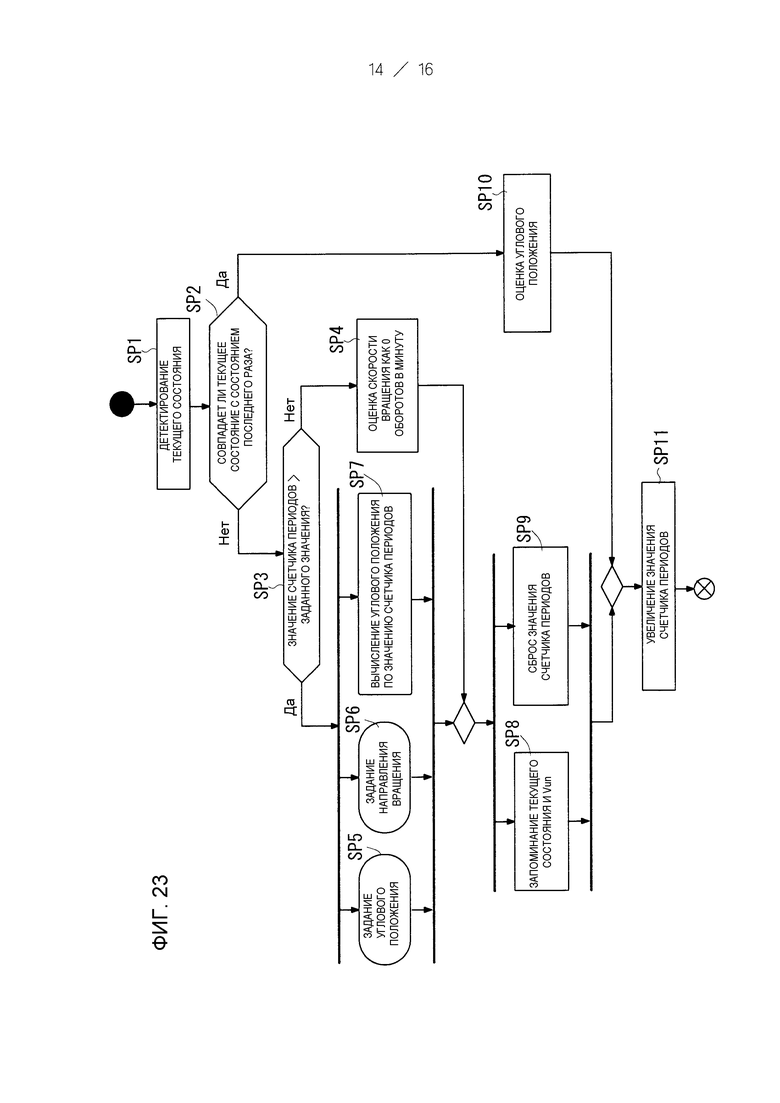


Изобретение относится к области электротехники и может быть использовано для управления электродвигателем воздушного кондиционера. Техническим результатом является повышение точности детектирования углового положения ротора синхронного двигателя. В устройстве для детектирования углового положения угловое положение может детектироваться с высокой точностью даже в тех случаях, когда возникает смещение. Электродвигатель (2) имеет: магнитный индуктор (22), имеющий постоянный магнит; и якорь (21) с тремя или более фазами катушек (21u, 21v, 21w) индуктивности. Магнитный индуктор (22) и якорь (21) вращаются относительно друг друга. Детектор (431) определяет, имеется ли равенство между: первым линейным индуцированным напряжением (Vun), которое представляет собой разность потенциалов между первым фазовым потенциалом и опорным потенциалом, причем опорный потенциал представляет собой либо минимальную фазу, либо максимальную фазу, из фазовых потенциалов, выдаваемых якорем в результате индуцированной электродвижущей силы; и вторым линейным индуцированным напряжением (Vvn), которое представляет собой разность потенциалов между вторым фазовым потенциалом и опорным потенциалом, причем второй фазовый потенциал является фазовым потенциалом, отличным от первого фазового потенциала. Блок (432) установки углового положения устанавливает расчетную величину углового положения электродвигателя (2) равной заданному значению в момент времени, в который имеется равенство между первым линейным индуцированным напряжением (Vun) и вторым линейным индуцированным напряжением (Vvn). 2 н. и 11 з.п. ф-лы, 26 ил., 1 табл.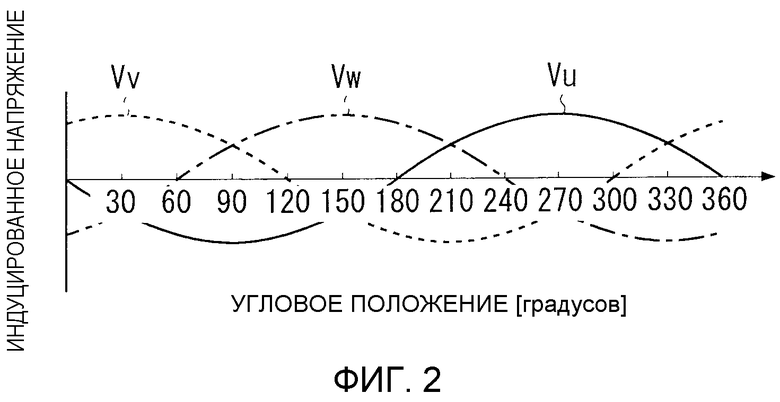
1. Устройство для детектирования углового положения электродвигателя, имеющего индуктор, включающий в себя постоянный магнит, и якорь, включающий в себя катушки индуктивности трех или более фаз, причем упомянутый индуктор и упомянутый якорь вращаются относительно друг друга, содержащее:
детектор, который определяет, равны ли первое линейное индуцированное напряжение и второе линейное индуцированное напряжение друг другу, причем упомянутое первое линейное индуцированное напряжение представляет собой разность потенциалов первого фазового потенциала из фазовых потенциалов, которые выдает упомянутый якорь в результате индуцированной электродвижущей силы, относительно опорного потенциала, а второе линейное индуцированное напряжение представляет собой разность потенциалов второго фазового потенциала из упомянутых фазовых потенциалов, отличных от упомянутого первого фазового потенциала, относительно упомянутого опорного потенциала, причем упомянутый опорный потенциал представляет собой любую из минимальной фазы и максимальной фазы; и
блок установки углового положения, который устанавливает расчетную величину углового положения упомянутого электродвигателя равной заданному значению в момент времени, когда упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение равны друг другу.
2. Устройство для детектирования углового положения по п. 1, в котором множество линий АС соединено, соответственно, с упомянутыми катушками индуктивности, причем упомянутые линии АС соединены с инвертором, а упомянутый инвертор соединен с первой и второй линиями DC на входной стороне, и
при этом упомянутое устройство для детектирования углового положения дополнительно содержит:
детектор напряжения, содержащий первую цепь, соединяющую упомянутую первую линию DC и первую из упомянутых линий АС, к которым прикладывается упомянутый первый фазовый потенциал, и
вторую цепь, соединяющую упомянутую первую линию DC и вторую из упомянутых линий АС, к которым прикладывается упомянутый второй фазовый потенциал, и детектирующий в качестве упомянутого первого линейного индуцированного напряжения первое напряжение между упомянутой первой линией DC и упомянутой первой из упомянутых линий АС в упомянутой первой цепи, а в качестве упомянутого второго линейного индуцированного напряжения второе напряжение между упомянутой первой линией DC и упомянутой второй из упомянутых линий АС в упомянутой второй цепи.
3. Устройство для детектирования углового положения по п. 2, в котором упомянутый детектор напряжения дополнительно содержит резисторы деления напряжения, последовательно соединенные друг с другом в каждой из упомянутой первой цепи и упомянутой второй цепи, при этом напряжения упомянутых резисторов деления напряжения в упомянутой первой цепи и упомянутой второй цепи, соответственно, используются в качестве упомянутого первого напряжения и упомянутого второго напряжения.
4. Устройство для детектирования углового положения по п. 2, в котором упомянутый детектор напряжения дополнительно содержит блок ограничения детектируемого напряжения, который ограничивает упомянутое первое напряжение заданной величиной, когда упомянутое первое линейное индуцированное напряжение больше или равно опорной величине, и ограничивает упомянутое второе напряжение упомянутой заданной величиной, когда второе линейное индуцированное напряжение больше или равно упомянутой опорной величине.
5. Устройство для детектирования углового положения по любому из пп. 1-4, дополнительно содержащее:
блок задания направления вращения, который задает направление вращения упомянутого электродвигателя в виде заданного направления на основе величины упомянутого первого линейного индуцированного напряжения или упомянутого второго линейного индуцированного напряжения в упомянутый момент времени, когда упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение равны друг другу.
6. Устройство для детектирования углового положения по п. 5, в котором упомянутый детектор многократно определяет, равны ли упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение друг другу, и
упомянутый блок задания направления вращения задает упомянутое направление вращения в виде упомянутого заданного направления на основе количественного соотношения между первой величиной и второй величиной (VunK, VvnK), причем упомянутая первая величина представляет собой значение одного из упомянутого первого линейного индуцированного напряжения и упомянутого второго линейного индуцированного напряжения в упомянутый момент времени, когда упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение равны друг другу, при этом упомянутая вторая величина представляет собой значение одного из упомянутого первого линейного индуцированного напряжения и упомянутого второго линейного индуцированного напряжения в момент времени, когда упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение равны друг другу в последний раз.
7. Устройство для детектирования углового положения по п. 6, в котором результат вычисления, получаемый путем сложения или умножения упомянутого первого линейного индуцированного напряжения и упомянутого второго линейного индуцированного напряжения в упомянутый момент времени, когда упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение равны друг другу, используется в качестве упомянутого первого значения, а упомянутый результат вычисления в момент времени, когда упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение равны друг другу в последний раз, используется в качестве упомянутого второго значения.
8. Устройство для детектирования углового положения по п. 4, в котором
упомянутый детектор многократно определяет изменение
количественного соотношения между упомянутым первым напряжением и упомянутым вторым напряжением для многократного определения, равны ли упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение друг другу,
при этом упомянутое устройство для детектирования углового положения дополнительно содержит:
блок задания направления вращения, который задает направление вращения упомянутого электродвигателя в виде заданного направления, когда событие, при котором упомянутое первое напряжение становится выше упомянутого второго напряжения для изменения упомянутого количественного соотношения, происходит, по меньшей мере, два раза подряд, и который задает упомянутое направление вращения в виде направления, противоположного упомянутому заданному направлению, когда событие, при котором упомянутое первое напряжение становится ниже упомянутого второго напряжения для изменения упомянутого количественного соотношения, происходит, по меньшей мере, два раза подряд.
9. Устройство для детектирования углового положения по п. 4, в котором
упомянутый детектор определяет, становится ли упомянутое первое напряжение выше упомянутого второго напряжения и становится ли упомянутое первое напряжение ниже упомянутого второго напряжения, и
при этом упомянутое устройство для детектирования углового положения дополнительно содержит:
блок задания направления вращения, который задает направление вращения упомянутого электродвигателя в виде заданного направления, когда, по меньшей мере, одно из упомянутого первого напряжения и упомянутого второго напряжения меньше порогового значения, меньшего или равного упомянутой заданной величине, а упомянутое первое напряжение становится выше упомянутого второго напряжения, и который задает упомянутое направление вращения в виде направления, противоположного упомянутому заданному направлению, когда, по меньшей мере, одно из упомянутого первого напряжения и упомянутого второго напряжения меньше упомянутого порогового значения, меньшего или равного упомянутой заданной величине, а упомянутое первое напряжение становится ниже упомянутого второго напряжения.
10. Устройство для детектирования углового положения по любому из пп. 2-4, дополнительно содержащее:
блок задания направления вращения, который задает направление вращения упомянутого электродвигателя,
причем упомянутый блок задания направления вращения
вычисляет коэффициент подобия между расчетным сигналом, идентичным упомянутому первому линейному индуцированному напряжению, когда упомянутое направление вращения является заданным направлением, и упомянутым первым линейным индуцированным напряжением, которое детектируется, и
задает упомянутое направление вращения на основе упомянутого коэффициента подобия.
11. Устройство для детектирования углового положения по любому из пп. 2-4, дополнительно содержащее:
блок задания направления вращения, который задает направление вращения упомянутого электродвигателя,
причем упомянутый блок задания направления вращения
вычисляет коэффициент подобия между расчетным сигналом, идентичным сигналу, получаемому путем выполнения вычисления одного из сложения и умножения упомянутого первого линейного индуцированного напряжения и упомянутого второго линейного индуцированного напряжения, когда упомянутое направление вращения является заданным направлением, и сигналом, получаемым путем выполнения упомянутого вычисления упомянутого первого линейного индуцированного напряжения и упомянутого второго линейного индуцированного напряжения, которые детектируются, и
задает упомянутое направление вращения на основе упомянутого коэффициента подобия.
12. Устройство для детектирования углового положения по п. 5, в котором
упомянутый детектор многократно определяет, равны ли упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение друг другу,
при этом упомянутое устройство для детектирования углового положения дополнительно содержит вычислитель скорости вращения, который вычисляет скорость вращения помянутого электродвигателя на основе множества моментов времени, когда упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение равны друг другу, и
упомянутый блок установки углового положения на основе упомянутого расчетного значения упомянутого углового положения, которое устанавливается в упомянутый момент времени, когда упомянутое первое линейное индуцированное напряжение и упомянутое второе линейное индуцированное напряжение равны друг другу, упомянутого направления вращения, которое задается упомянутым блоком задания направления вращения, упомянутой скорости вращения, вычисляемой упомянутым вычислителем скорости вращения, и времени от момента, когда устанавливается упомянутое расчетное значение упомянутого углового положения, до другого момента времени, вычисляет упомянутое угловое положение в упомянутый другой момент времени.
13. Воздушный кондиционер, содержащий:
упомянутое устройство для детектирования углового положения по любому из пп. 1-4;
упомянутый электродвигатель; и
вентилятор, приводимый в действие упомянутым электродвигателем.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РОТОРА В ЭЛЕКТРИЧЕСКИХ МАШИНАХ С ДВОЙНОЙ ЗУБЧАТОСТЬЮ | 2000 |
|
RU2217859C2 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088039C1 |
| Устройство для определения углового положения вала двухфазного синхронного двигателя с магнитной асимметрией ротора | 1988 |
|
SU1640808A1 |
| СПОСОБ СБОРКИ РОТОРОВ ПАРОВОЙ ТУРБИНЫ С ПРИНУДИТЕЛЬНЫМ ЦЕНТРИРОВАНИЕМ ПОЛУМУФТ | 2011 |
|
RU2484256C1 |
| JP 2005137106 A, 28.05.2005 | |||
| JP 2007166695 A, 28.06.2007 | |||
| US 7034478 B2, 25.04.2006 | |||
| EP 1429450 B1, 13.02.2008 | |||
| WO 2009034455 A1, 19.03.2009. | |||

