Изобретение относится к области мониторинга, сопровождения и управления подвижными объектами, преимущественно наземными транспортными средствами, например автомобилями.
Изобретение может быть использовано в приборостроении для производства систем мониторинга, сопровождения и управления подвижными объектами, а также в организациях и учреждениях, занимающихся разработкой, испытанием и эксплуатацией указанных систем связи, в частности в органах внутренних дел.
Известен способ мониторинга состояния и местоположения транспортных средств, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающую в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющуюся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов, при этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию по радиоэфиру, используя объектовый терминал стандартной сотовой сети подвижной связи, например GSM-сети, и/или объектовый приемопередатчик ретрансляционного канала (патент Российской Федерации №2348551, G08G 1/13, опубликовано в 2009 г.) Данный способ используется в основном для мониторинга угнанных транспортных средств и в случае передачи данных в УКВ диапазоне возможно наложение сигналов от нескольких подвижных объектов друг на друга, что снижает надежность и эффективность мониторинга и управления подвижных объектов, а в некоторых ситуациях может привести к невозможности мониторинга и управления.
Известен также способ связи при мониторинге и управлении подвижными объектами, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающую в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющуюся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов, при этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию. (Патент Российской Федерации №2273055, G08G 1/137, опубликовано в 2006 г.) В этом патенте центром мониторинга является диспетчерский пункт. Этот способ выбран в качестве прототипа предложенного решения.
Недостатком данного способа является то, что сотовый канал не позволяет полностью перекрывать всю зону, так как зависит от рельефа местности, от плотности расположения антенн приема и передачи, надежность связи зависит от метеоусловий, и в случае передачи данных в УКВ диапазоне возможно наложение сигналов от нескольких подвижных объектов друг на друга, так как в таком канале отсутствует синхронизация передачи данных, что снижает надежность и эффективность мониторинга и управления подвижными объектами, а в некоторых ситуациях может привести к невозможности мониторинга и управления подвижными объектами.
В предложенном изобретении ставится техническая задача создания более надежного способа двусторонней связи между подвижными объектами и центром мониторинга, более помехоустойчивого, что особенно важно при мониторинге и управления транспортными средствами, проводимыми, например, органами внутренних дел.
Данная техническая задача решается за счет того, что осуществляют способ связи при мониторинге и управлении подвижными объектами, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга. Данные включают в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи. Также передаются данные о состоянии отдельных подсистем подвижных объектов. При этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию. Используют канал связи в УКВ диапазоне, состоящий из голосового канала связи, на котором производят передачу запросов или команд от центра мониторинга к бортовому оборудованию, и каналов данных, которые используют для передачи данных от бортового оборудования к центру мониторинга. В каждом канале данных используют временную схему распределения данных от бортового оборудования каждого подвижного объекта. Передачу данных от центра мониторинга к бортовому оборудованию подвижных объектов и от бортового оборудования к центру мониторинга синхронизируют с синхроимпульсом от центра мониторинга, который производят в голосовом канале в УКВ диапазоне.
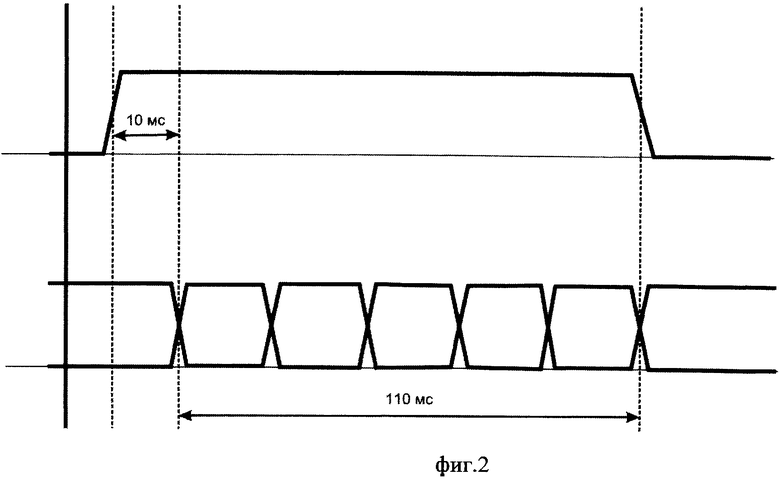
Предлагаемый способ связи при мониторинге и управлении подвижными объектами поясняется с помощью прилагаемых чертежей. На фиг.1 показан один кадр канала связи и распределение слотов внутри кадра. Обозначено: SYNC - синхропосылка от центра мониторинга (на схеме обозначено как ЦМ) на голосовом канале, после которой центр мониторинга переключается на канал данных. SLOT 1 - это слот для передачи данных от бортового оборудования (на схеме БО 1) подвижного объекта с номером 1. SLOT 2 - это слот для передачи данных от бортового оборудования подвижного объекта номер 2. И так далее. Между слотами данных от подвижных объектов с номерами 30 и 31, а также после номера 60 передаются слоты с возможными тревожными сообщениями, на фиг 1. обозначенные как ALARM SLOT. Предпоследний слот в кадре обозначен как REGISTER SLOT - слот для передачи сообщения о регистрации в данном центре мониторинга. Заключительный слот в кадре - LONG SLOT - ответ на команду из центра мониторинга.
Временная диаграмма слота бортового оборудования показана на фиг.2. Остальные слоты идентичны.
Сущность предлагаемого изобретения заключается в следующем. Осуществляют способ связи при мониторинге и управлении подвижными объектами. При нем осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга. Данные включают в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи. Также передаются данные о состоянии отдельных подсистем подвижных объектов. При этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию.
В системе мониторинга вводят канал связи в УКВ диапазоне. В канале связи в УКВ диапазоне используют два канала связи. Один из них - голосовой - для передачи синхроимпульсов, команд и запросов от центра мониторинга к бортовому оборудованию. Канал также может использоваться и используется для обмена голосовыми сообщениями между экипажами подвижных объектов.
Другой - канал данных, который используются для передачи информации от бортового оборудования в центр мониторинга. Возможна организация нескольких каналов данных на разных частотах. При такой реализации команды и запросы от центра мониторинга к бортовому оборудованию передаются на одном общем голосовом канале, а данные от бортового оборудования передаются параллельно по нескольким обратным каналам связи.
Для разделения каналов связи с бортовым оборудованием используется временная схема распределения канала. Канал делится на кадры, например на 10-секундные. Начало каждого кадра соответствует началу секунды, кратной 10 (момент начала секунды определяется по таймпульсу).
Каждый кадр делится в свою очередь на слоты, например, такие:
- слот команд и синхропосылок от центра мониторинга;
- 60 слотов данных от бортового оборудования;
- два слота для передачи тревожных сообщений;
- слот для ответа на команды центра мониторинга.
См. фиг.1.
Каждое бортовое оборудование характеризуется адресом, который выбирается из диапазона 1…60. Адрес бортового оборудования назначается либо на этапе конфигурирования либо во время процедуры автоматической регистрации. Дублирование адресов бортового оборудования на одном канале данных от бортового оборудования к центру мониторинга не допускается.
Центр мониторинга в свой слот переключает свою радиостанцию на передачу, ждет 10 мс, а затем передает синхропосылку и при необходимости свою команду. Сразу после окончания слота центра мониторинга начинается пустой слот, во время которого центр мониторинга готовится к приему данных, переключаясь на канал данных. После получения синхропосылки от центра мониторинга все бортовое оборудование начинает отсчет времени. Бортовое оборудование подвижного объекта под номером 1 готовится к передаче. Аналогично каждое бортовое оборудование начинает переключаться на канал данных за 200 мс до начала своего слота, т.е. когда еще выполняются чужие слоты. В момент начала своего слота бортовое оборудование переключается на передачу, отрабатывает паузу в 10 мс и передает свои данные.
Дополнительно между слотами бортового оборудования существуют 10 мс зазоры, которые позволяют дольше работать от внутренних часов в случае пропадания синхроимульса. В середине и в конце каждого кадра вставляются тревожные слоты. Они могут быть заняты любым бортовым оборудованием, у которого есть сообщение о тревоге. Если это сообщение успешно принято в центр мониторинга, то в следующей синхропосылке он сгенерирует подтверждение для соответствующего бортового оборудования. Если тревожное сообщение не было принято, то потревоженное бортовое оборудование передаст свое сообщение в следующем кадре.
Предпоследним в кадре идет слот для передачи сообщения о регистрации в данном центре мониторинга. Последним в кадре идет слот для ответа на команду из центра мониторинга.
Данные от бортового оборудования к центру мониторинга передаются пакетами. См. фиг.2.
Каждый пакет состоит из стартовой синхропоследовательности, тела пакета, контрольной суммы и завершающих битов.
Заявленный способ связи при мониторинге и управлении подвижными объектами может быть осуществлен в промышленности с применением освоенных современных технологий, материалов и процессов и может быть использован для производства систем мониторинга, сопровождения и управления подвижными объектами, а также в организациях и учреждениях, занимающихся разработкой, испытанием и эксплуатацией указанных систем связи.
Предложенный способ связи при мониторинге и управлении подвижными объектами реализован в серийно выпускаемой системе «Алмаз». Эксплуатация показала более высокую надежность, помехоустойчивость и эффективность связи по сравнению с существующими способами и обеспечивает синхронизацию данных, независимую от каналов связи по сотовым сетям. Этот способ рекомендован к использованию для мониторинга и управления транспортными средствами органами внутренних дел и другими организациями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОКАНАЛЬНОЙ СВЯЗИ ПРИ МОНИТОРИНГЕ И УПРАВЛЕНИИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2468531C1 |
| СПОСОБ СВЯЗИ ПРИ МОНИТОРИНГЕ И УПРАВЛЕНИИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2471311C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
| СПОСОБ НАВИГАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2561644C1 |
Изобретение относится к области мониторинга, сопровождения и управления подвижными объектами, преимущественно наземными транспортными средствами, например автомобилями. В предложенном способе осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга. Данные включают в себя координаты местоположения, определяемые по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи, а также другие параметры движения подвижных объектов. Кроме того, передаются данные о состоянии отдельных подсистем подвижных объектов. При этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию. Используют канал связи в УКВ диапазоне, состоящий из голосового канала связи, на котором производят передачу запросов или команд от центра мониторинга к бортовому оборудованию, и каналов связи, которые используют для передачи данных от бортового оборудования к центру мониторинга. В каждом канале связи для передачи данных используют временную схему распределения данных от бортового оборудования каждого подвижного объекта. Передачу данных от центра мониторинга к бортовому оборудованию подвижных объектов и от бортового оборудования к центру мониторинга синхронизируют с синхроимпульсом от центра мониторинга, который производят в голосовом канале в УКВ диапазоне. Изобретение обеспечивает повышение надежности и эффективности связи при мониторинге. 2 ил.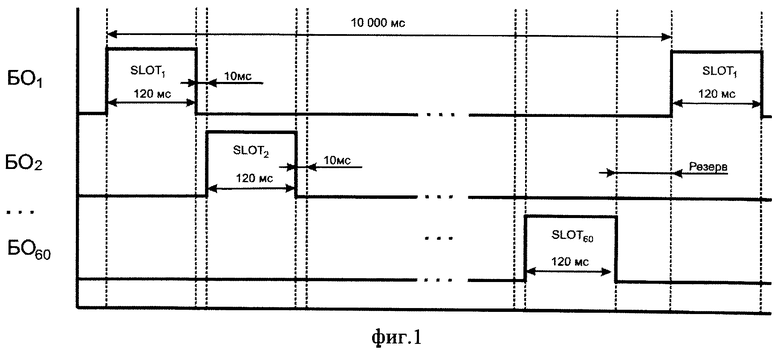
Способ связи при мониторинге и управлении подвижными объектами, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающую в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов, при этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию, отличающийся тем, что используют канал связи в УКВ диапазоне, состоящий из голосового канала связи, на котором производят передачу запросов или команд от центра мониторинга к бортовому оборудованию, и каналов связи, которые используют для передачи данных от бортового оборудования к центру мониторинга, причем в каждом канале связи для передачи данных используют временную схему распределения данных от бортового оборудования каждого подвижного объекта, при этом передачу данных от центра мониторинга к бортовому оборудованию подвижных объектов и от бортового оборудования к центру мониторинга синхронизируют с синхроимпульсом от центра мониторинга, который производят в голосовом канале в УКВ диапазоне.
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |
| СИСТЕМА МОНИТОРИНГА КООРДИНАТ И КОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2237925C1 |
| Безвентиляторная воздушная скороморозилка | 1948 |
|
SU76153A1 |

